

A Cooperative Control Strategy for a Hydraulic Regenerative Braking System Based on Chassis Domain Control
Abstract
:1. Introduction
2. Establishment HRBS Simulation Model
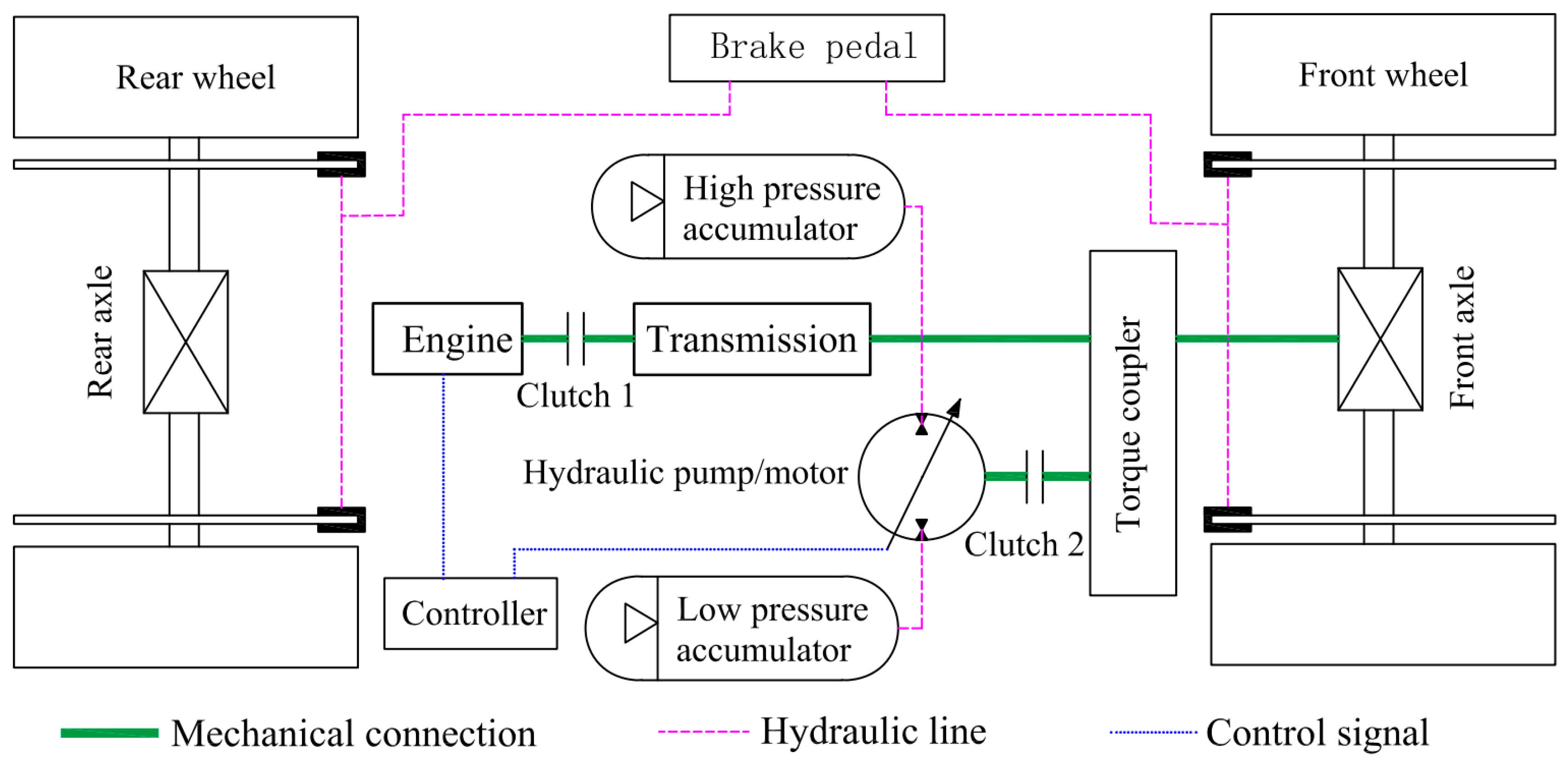
2.1. Working Principle of HRBS
2.2. Mathematical Model of Hydraulic Pump/Motor
2.3. Mathematical Model of Hydraulic Accumulator
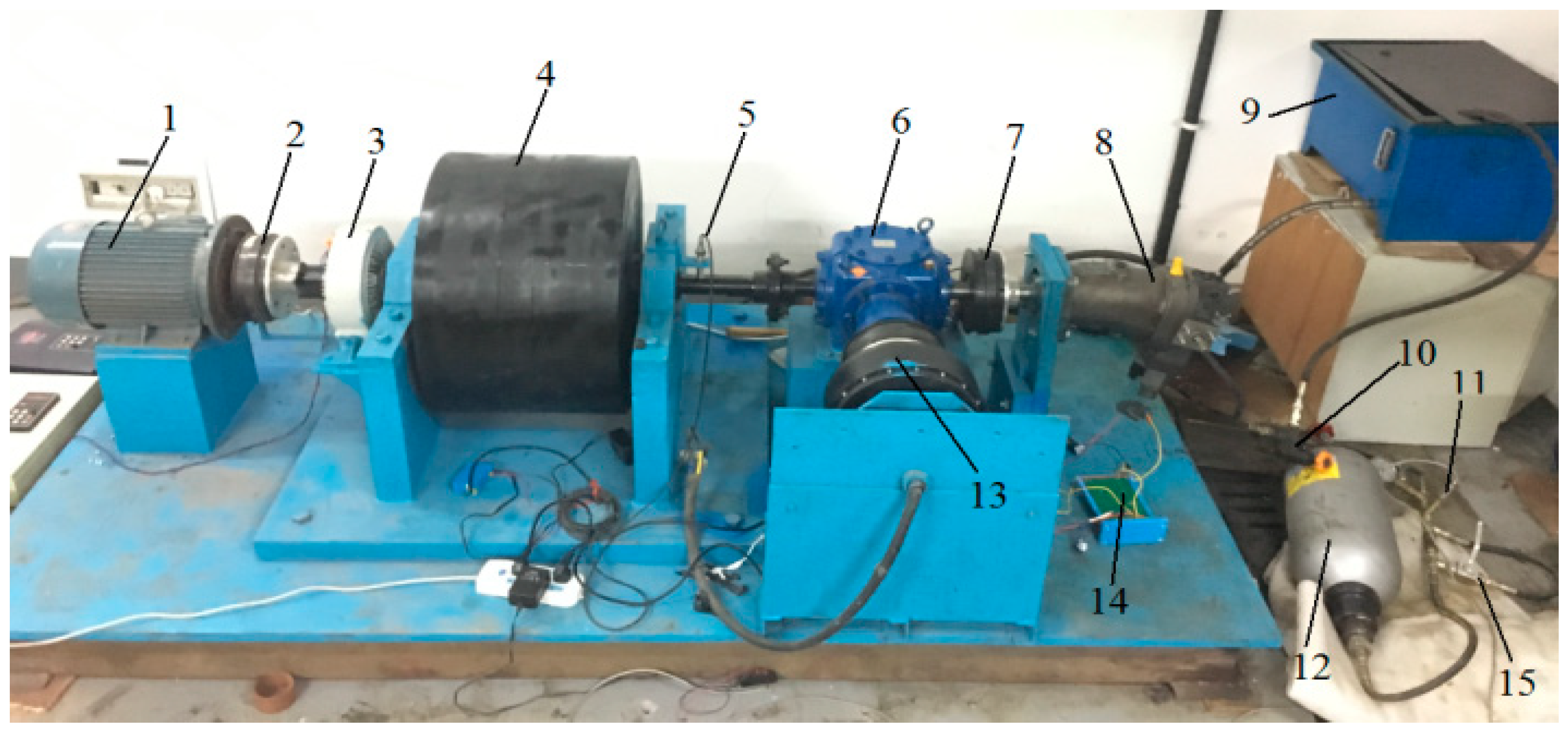
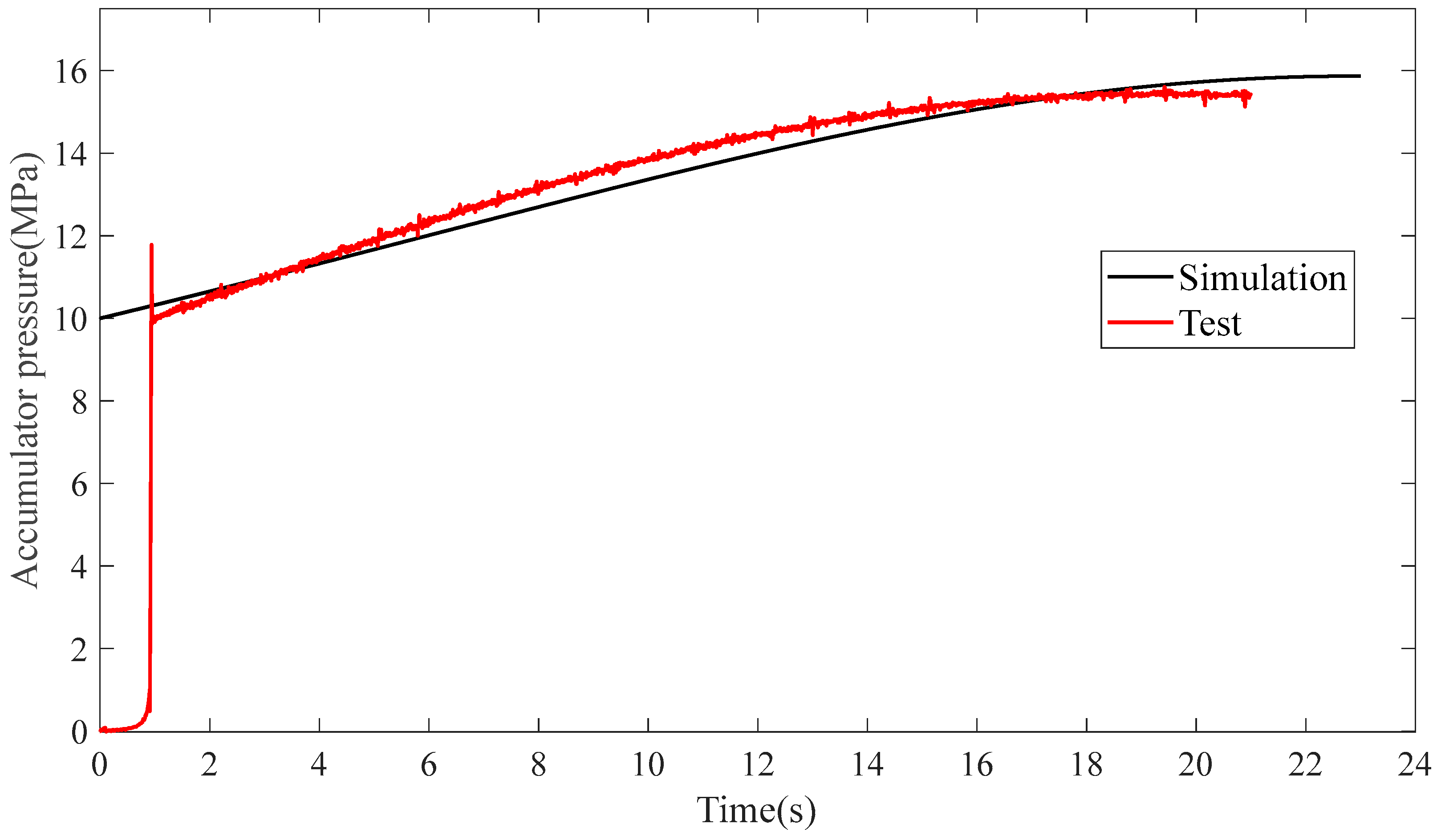
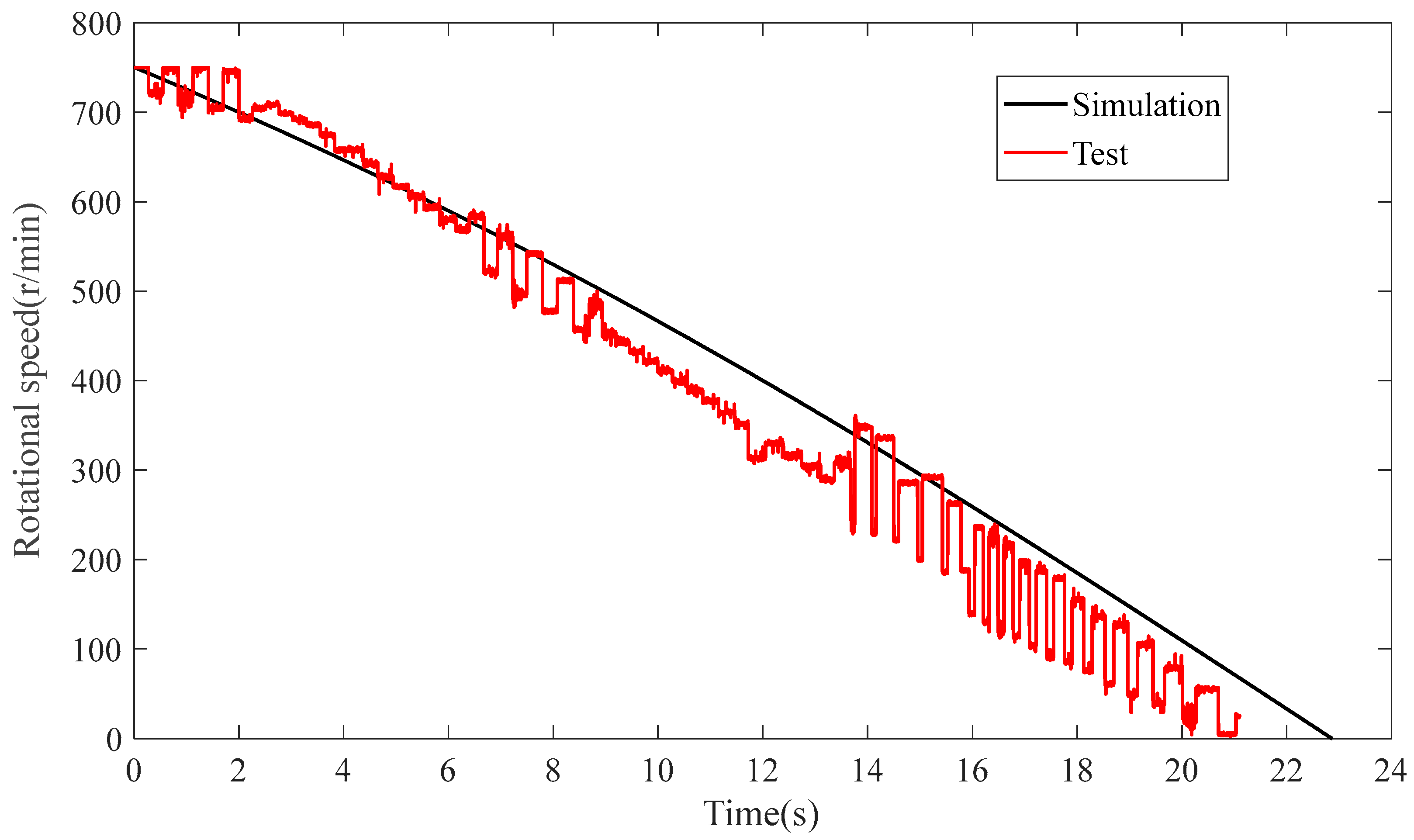
2.4. Validation of HRBS Model
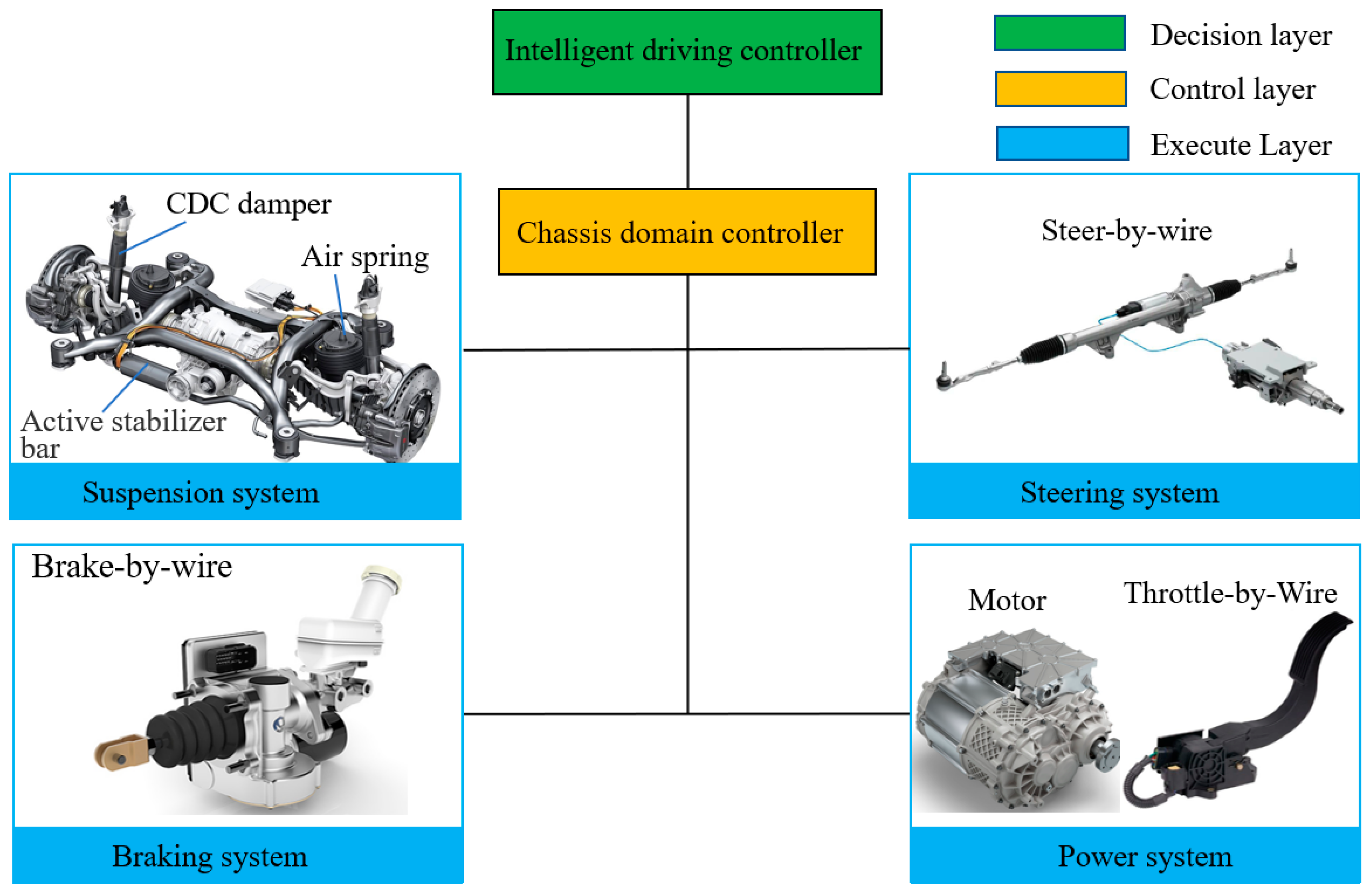
3. The Design of a Cooperative Control Strategy for HRBS Based on Chassis Domain Control
3.1. Vehicle Anti-Loss Control Strategy
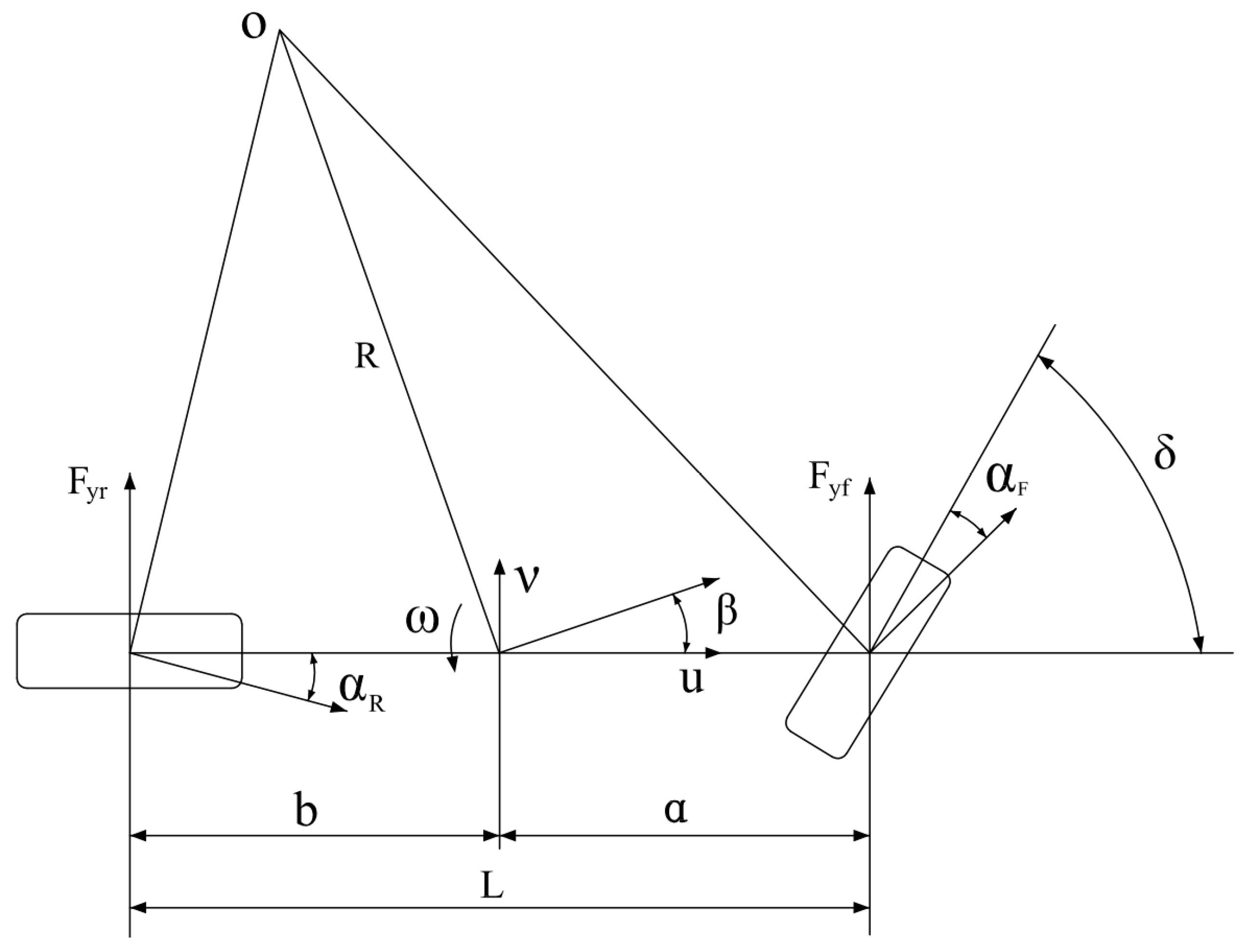
3.1.1. 2-DOF Vehicle Model
- (1)
- Ignore the influence of the steering system and directly take the front wheel angle as the input parameter.
- (2)
- Ignore the influence of suspension kinematic characteristics; it is assumed that the vehicle body only moves in a plane parallel to the ground, and we neglect the upward and downward motions along the z-axis, the pitching motion around the y-axis and the roll motion around the x-axis.
- (3)
- The forward speed of the vehicle is the constant.
- (4)
- The tire cornering characteristics are treated as linear characteristics.
- (5)
- Ignore the aerodynamic effects.
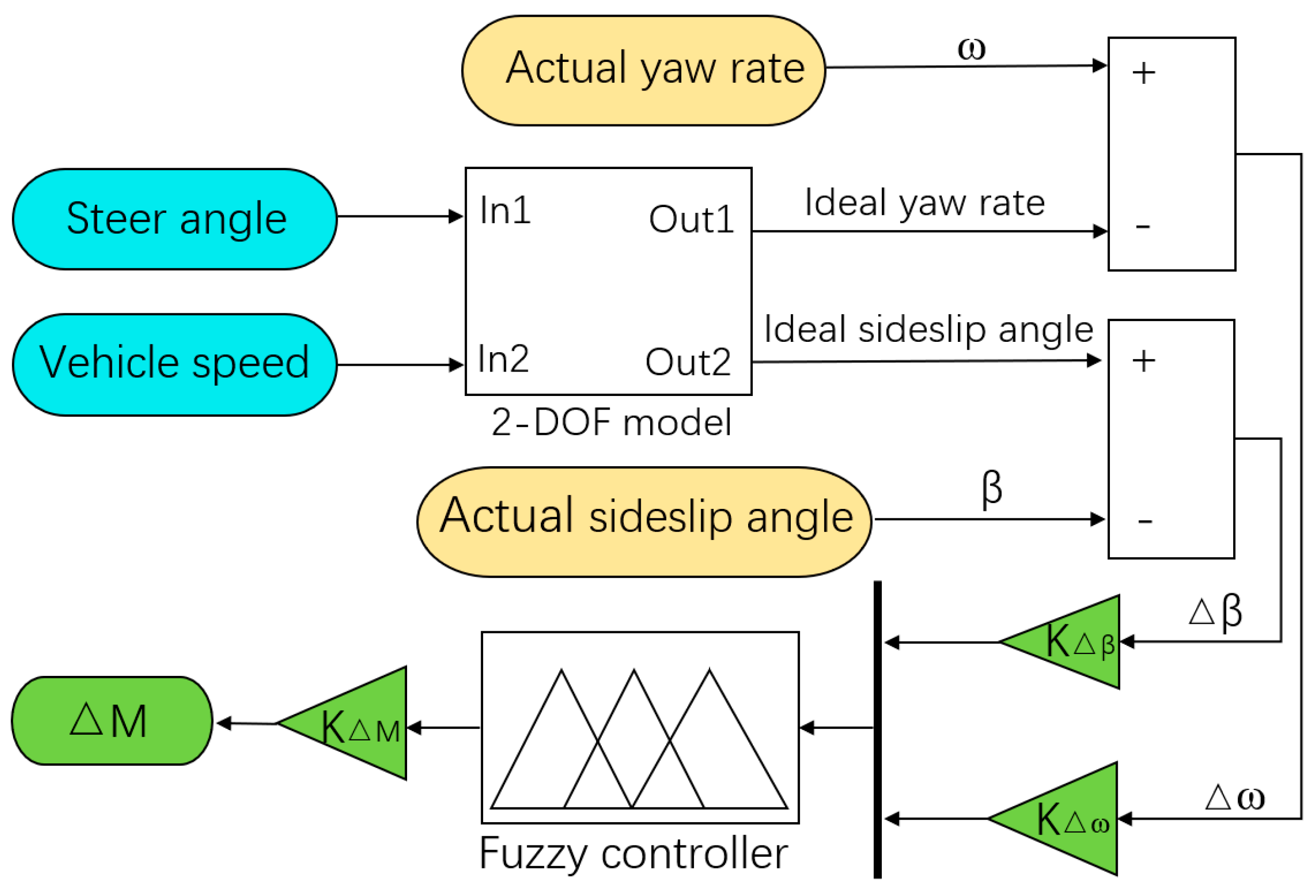
3.1.2. Calculation of Compensation Torque
3.1.3. Determination of Whether the Vehicle Is Out of Control
3.1.4. Vehicle Anti-Loss Control Strategy
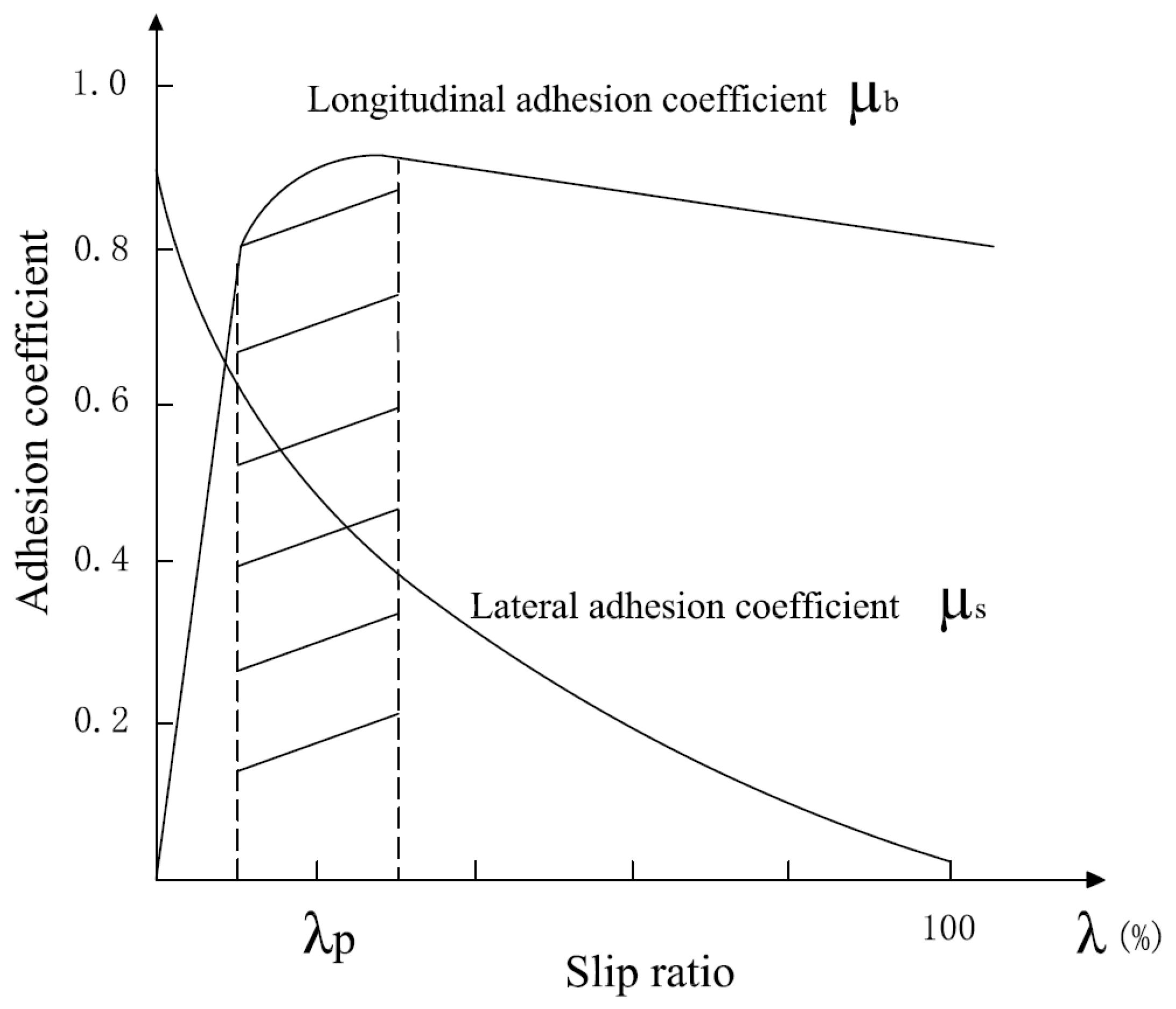
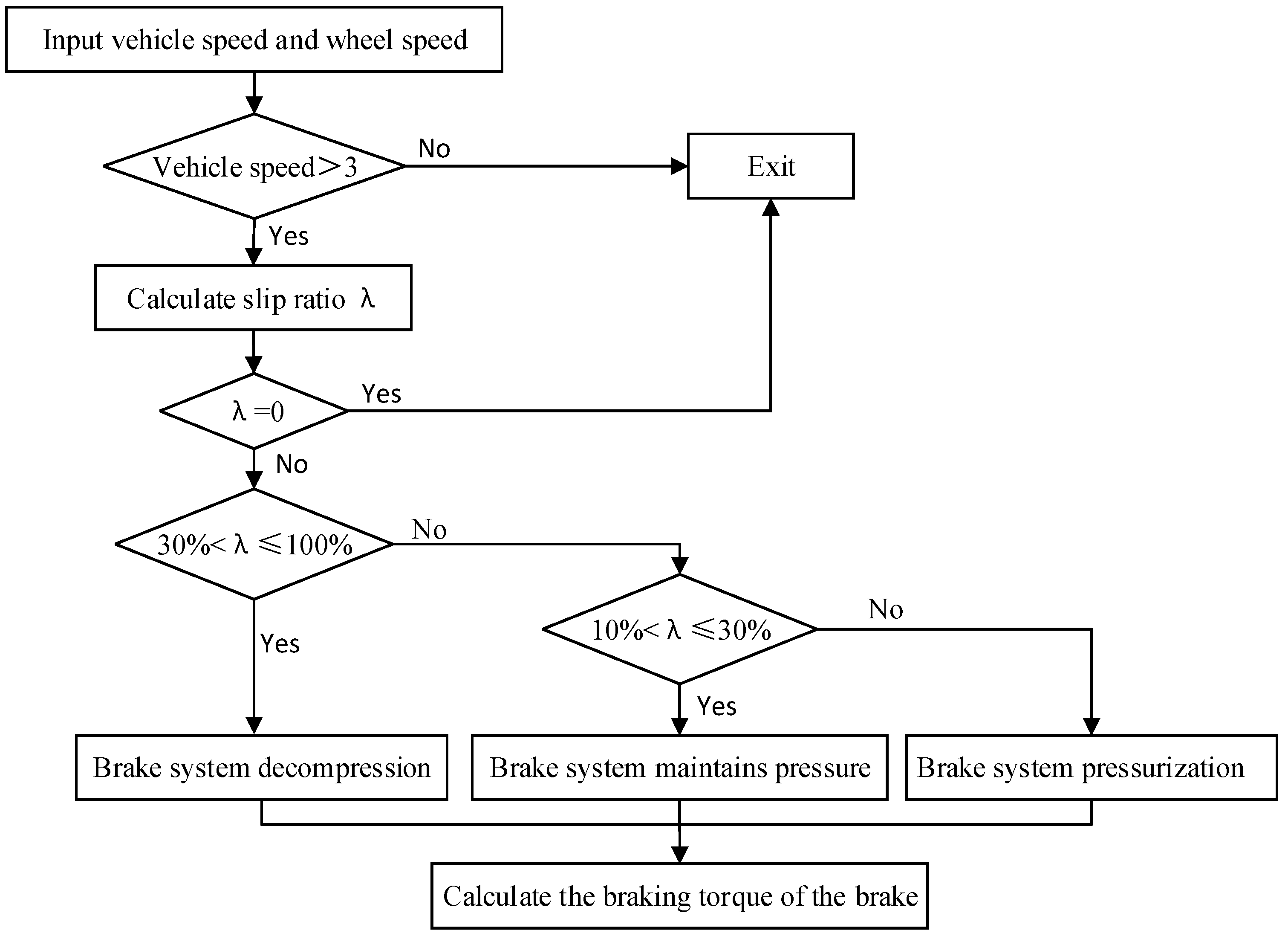
3.2. Wheel Anti-Lock Control Strategy
- (1)
- Mechanical delay of the brake and other nonlinear factors are ignored, and the brake is simplified as an ideal model as well.
- (2)
- Nonlinear elasticity of the return spring in the solenoid valve, transmission delay of the brake pressure with the flow of the brake fluid, and action lag of other mechanical components are all ignored, and flow process of the brake fluid is characterized by the one solenoid valve link and the one integral link. The transfer function of the simplified model is expressed by
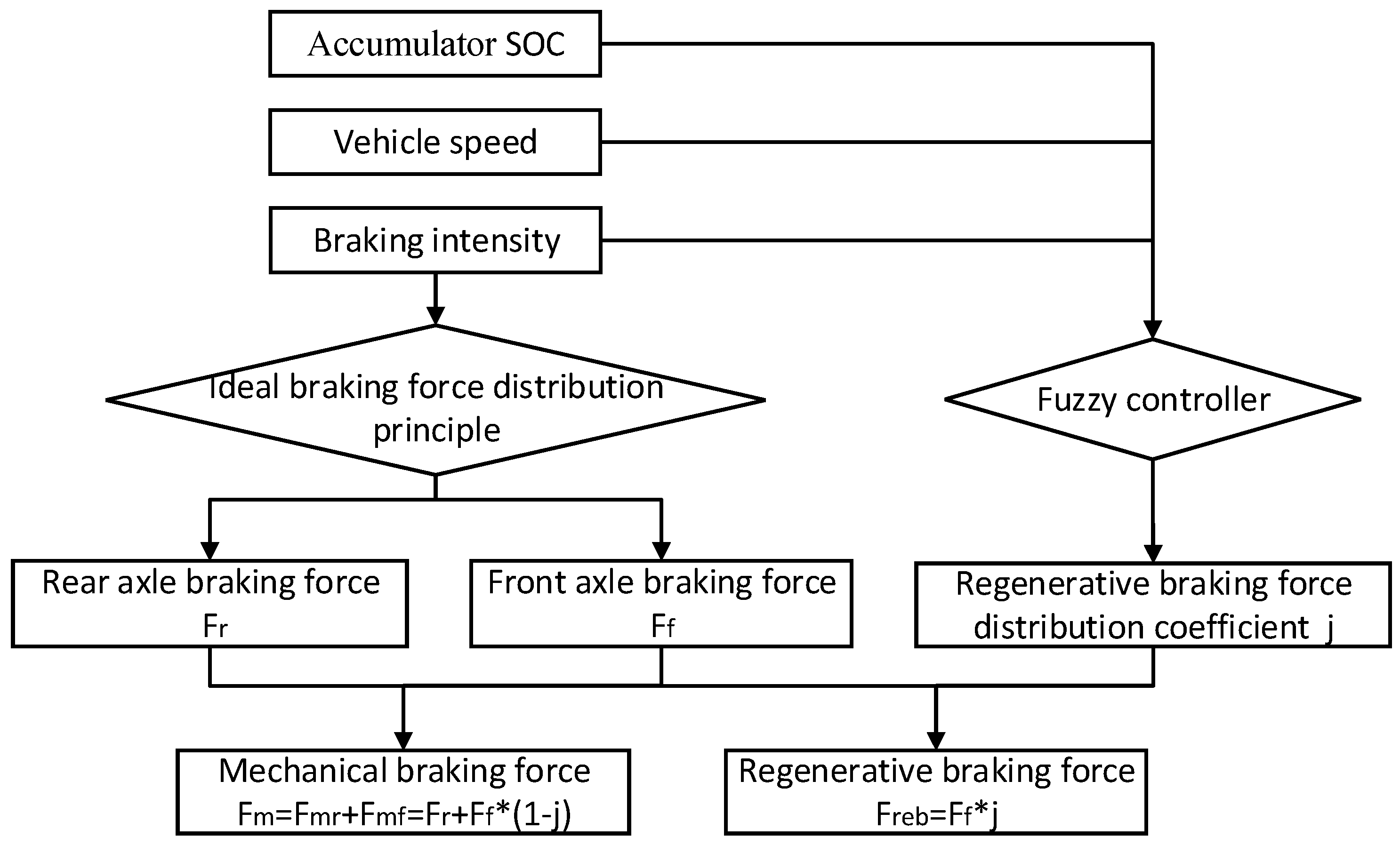
3.3. Regenerative Braking Force and Mechanical Braking Force Distribution
- (1)
- When the vehicle speed is too high, less braking energy is recovered for braking safety; when the vehicle speed is too low, less energy can be recovered.
- (2)
- When the accumulator SOC is high, energy-recovery efficiency is low, as little as possible to recover braking energy; when the hydraulic accumulator SOC is low, energy-recovery efficiency is high, as much as possible to recover energy.
- (3)
- When the braking intensity is too high, the energy is not recovered for braking safety; when the braking intensity is low, the braking-energy recovery shall be increased [23].
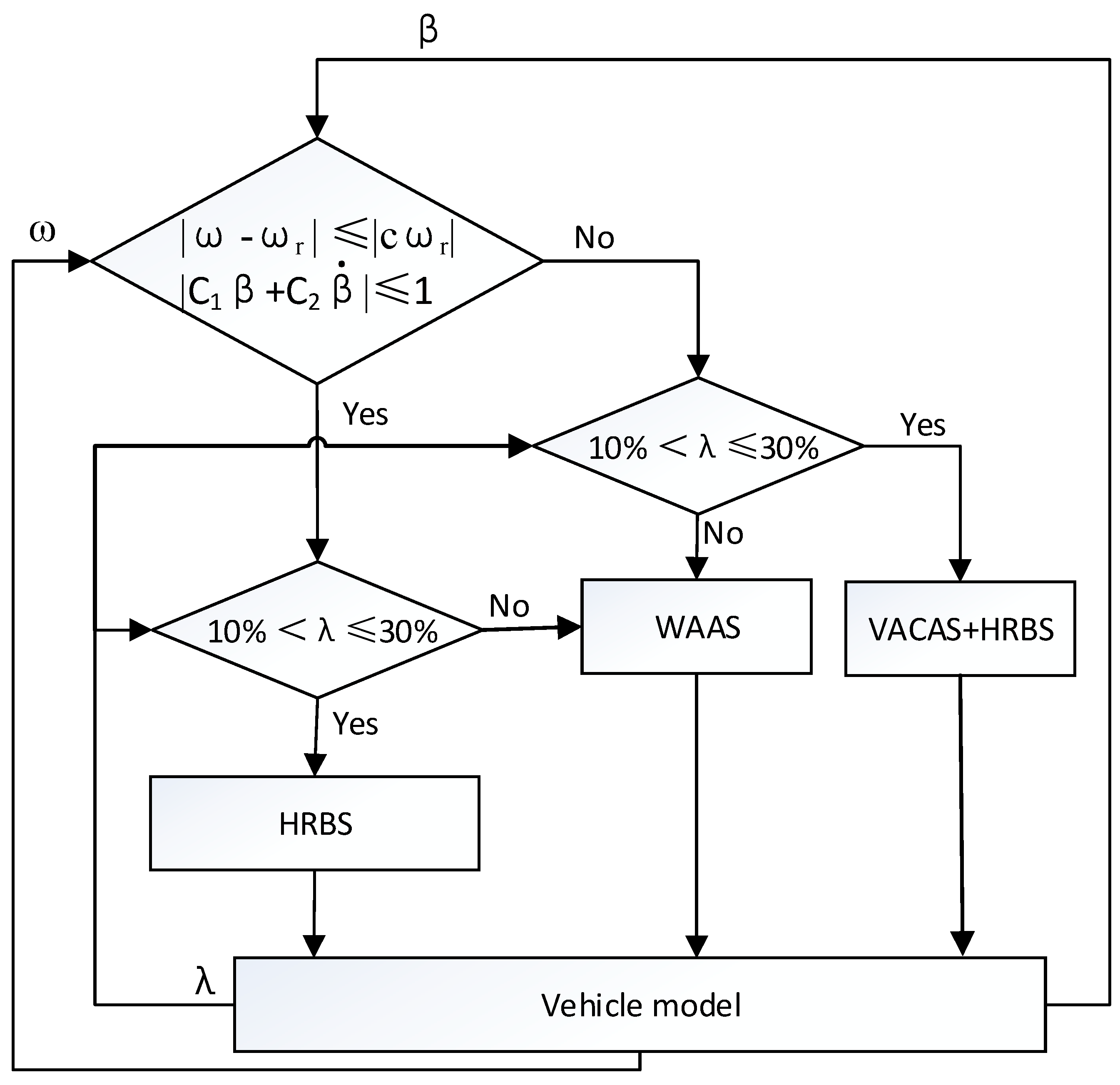
3.4. Design of the Cooperative Control Strategy for HRBS in Chassis Domain Control
- (1)
- When both the yaw rate ω and the sideslip angle β meet the requirements of Equations (15) and (16), and the wheel slip ratio λ is within the stable region, VACAS and WAAS will not work; only HRBS will work.
- (2)
- When both the yaw rate ω and the sideslip angle β meet the requirements of Equations (15) and (16), but the wheel slip ratio λ is outsider the stable region, WAAS works, and VACAS and HRBS do not work.
- (3)
- When the yaw rate ω and the sideslip angle β do not meet the requirements of Equations (15) and (16), but the wheel slip ratio λ is in the stable region, VACAS and HRBS work, and WAAS does not work.
- (4)
- When the yaw rate ω and the sideslip angle β do not meet the requirements of Equations (15) and (16), and the wheel slip ratio λ is outside the stable region, WAAS works, VACAS and HRBS do not work. The requirement of the compensation yaw moment is fulfilled by WAAS controlling, and is required to return the car to attain to a stable state, because wheel slip ratio is not satisfied at this time. Thus, braking torque is not necessary to the wheels by means of the VACAS system. Otherwise, the wheel slip ratio continues to deteriorate. Hence, the braking force of the other wheels needs to be reduced by WAAS with to compensate the yaw moment.
4. Simulation and Analysis
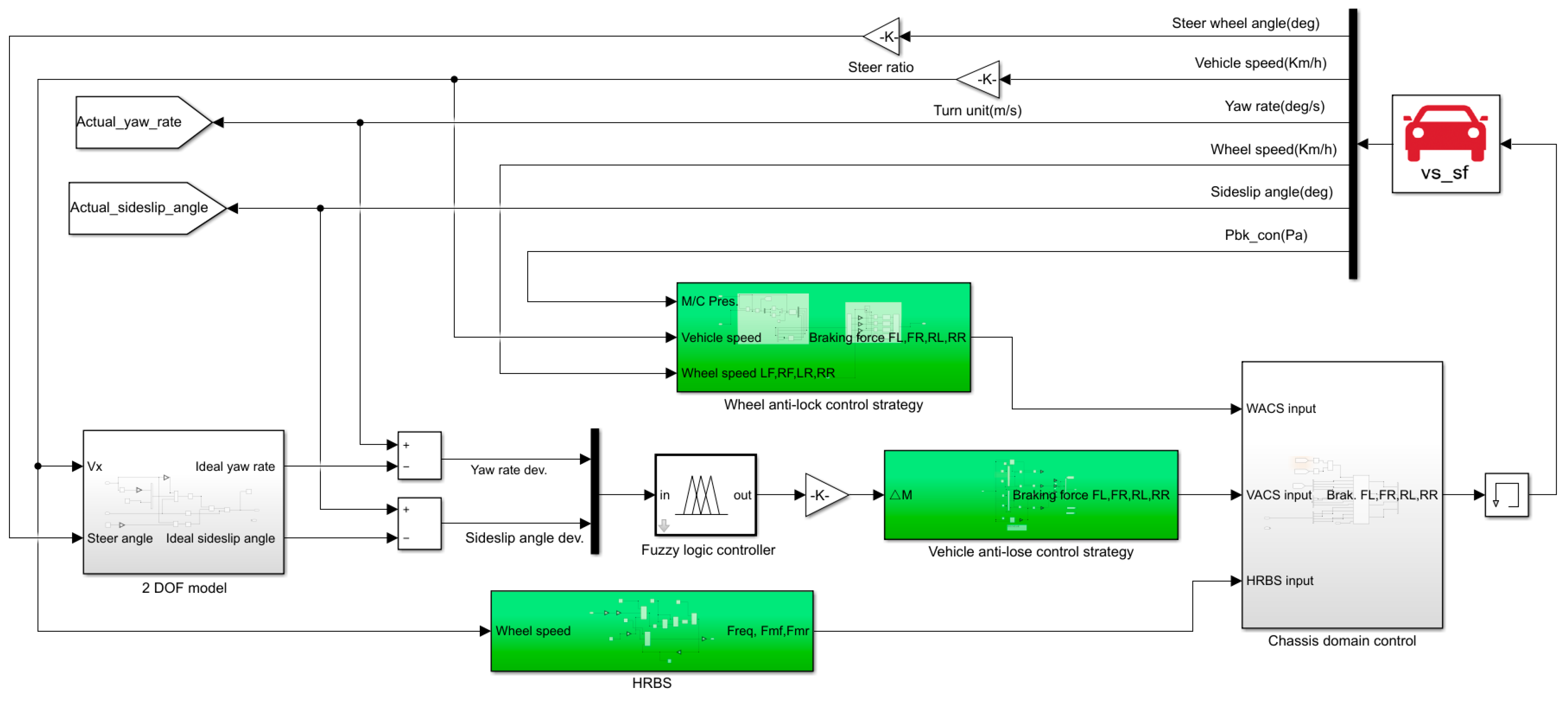
4.1. Build Vehicle Simulation Model Based on Chassis Domain Control
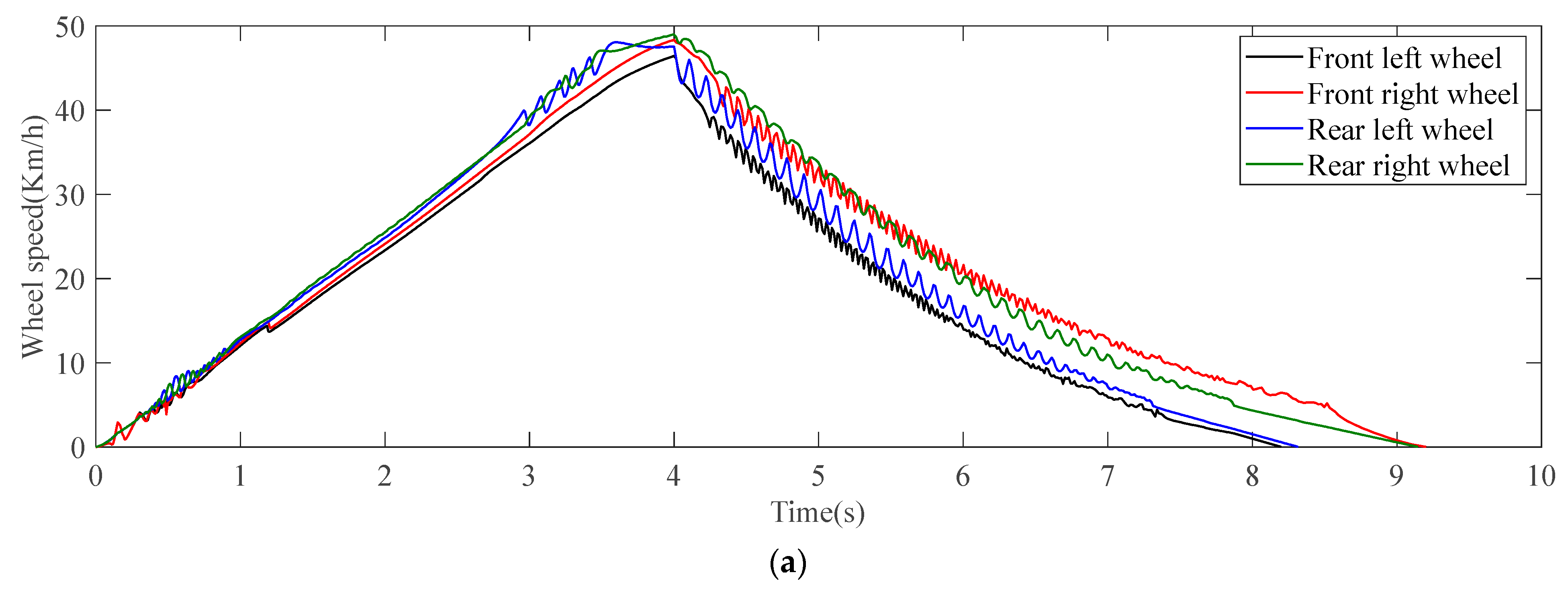
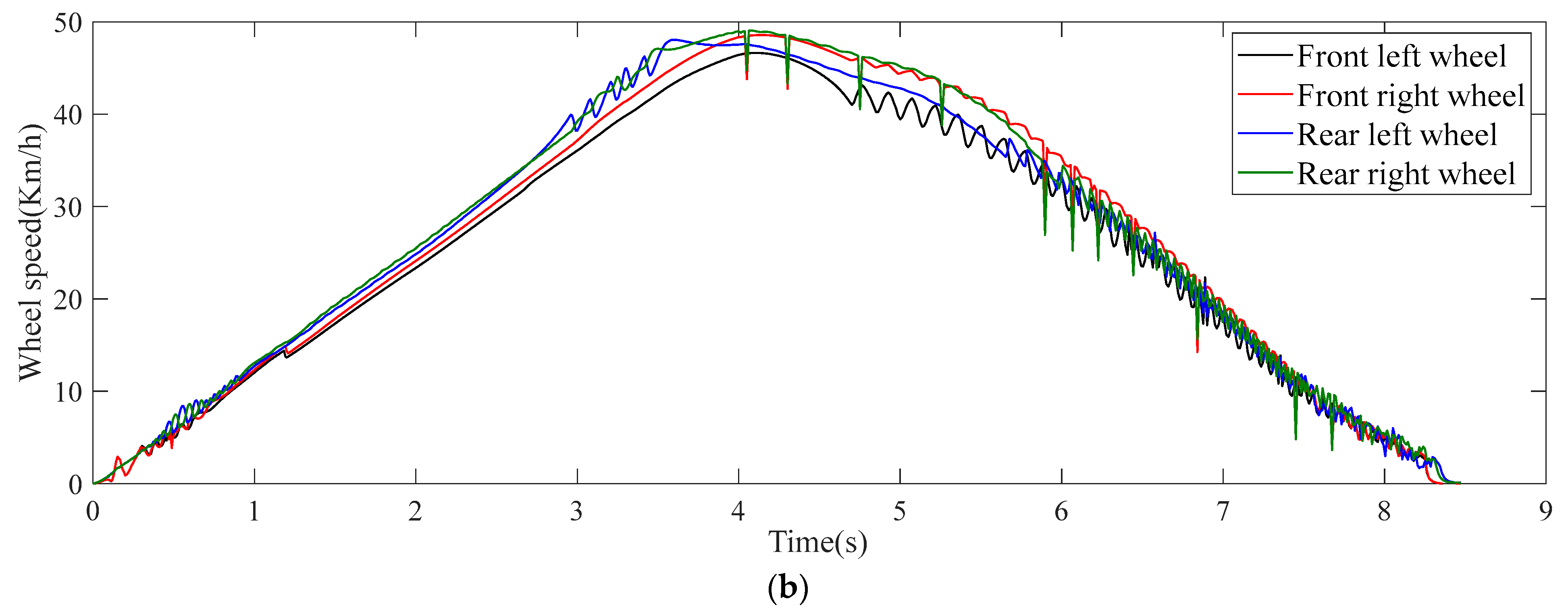
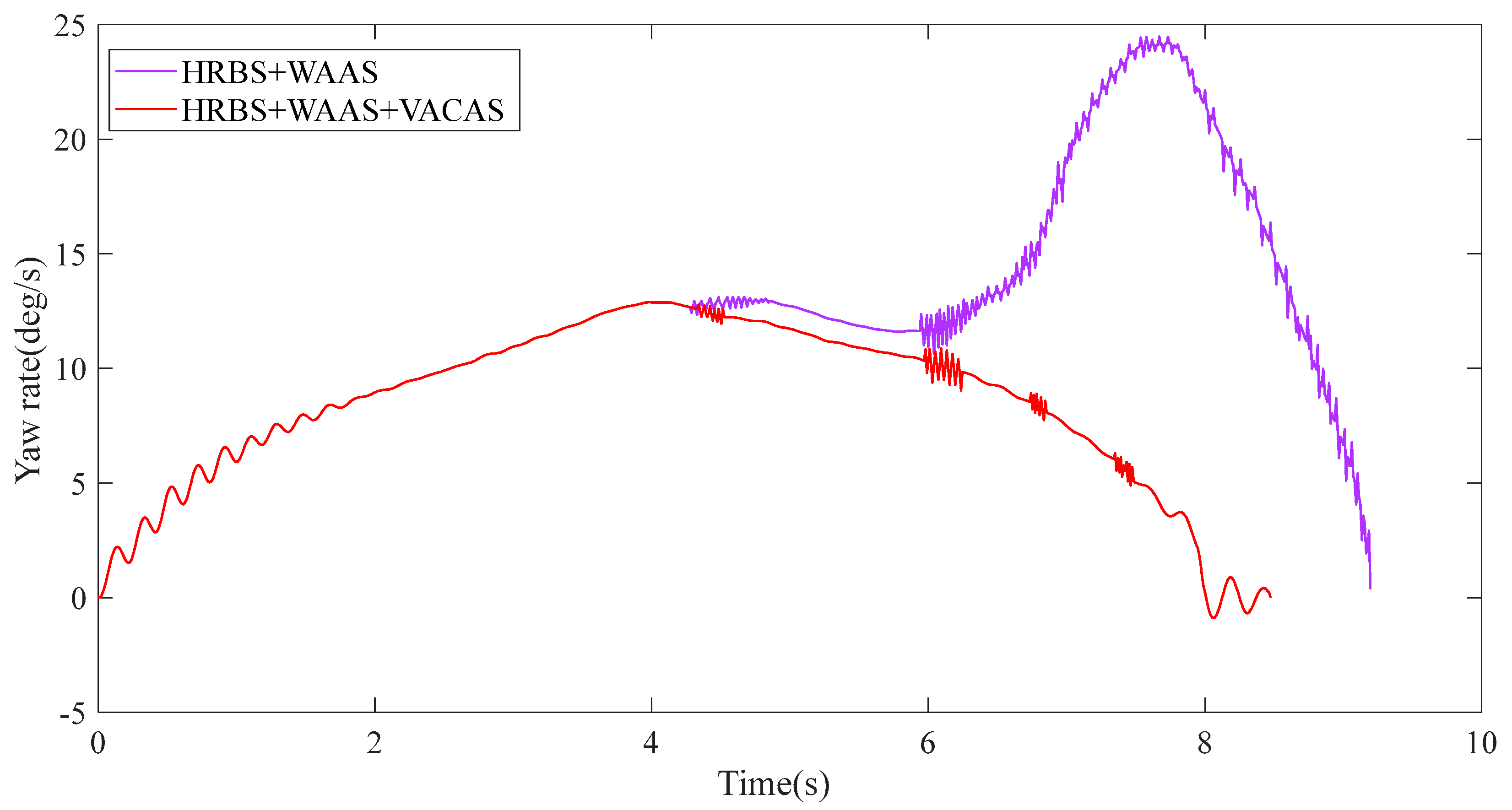
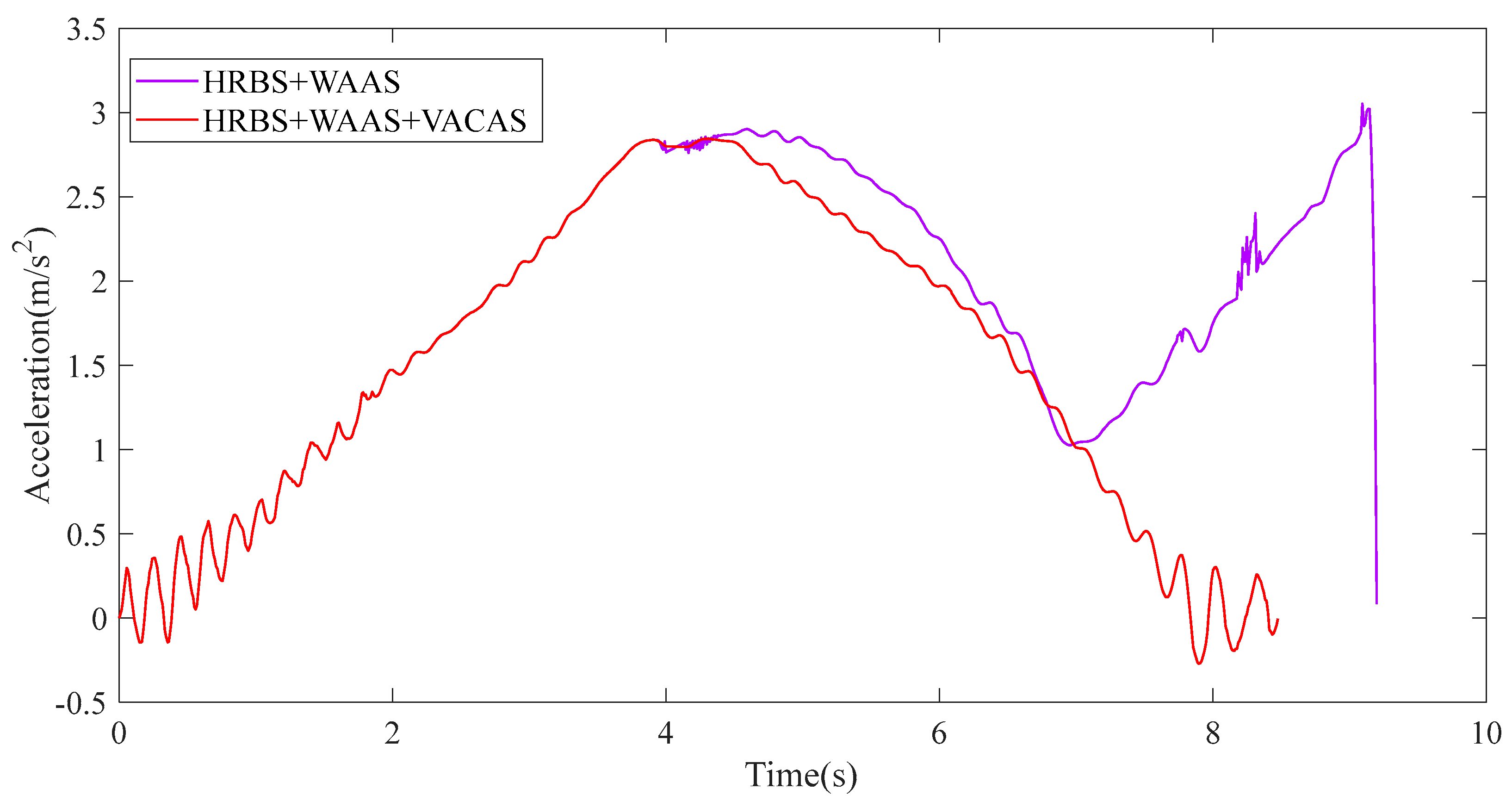
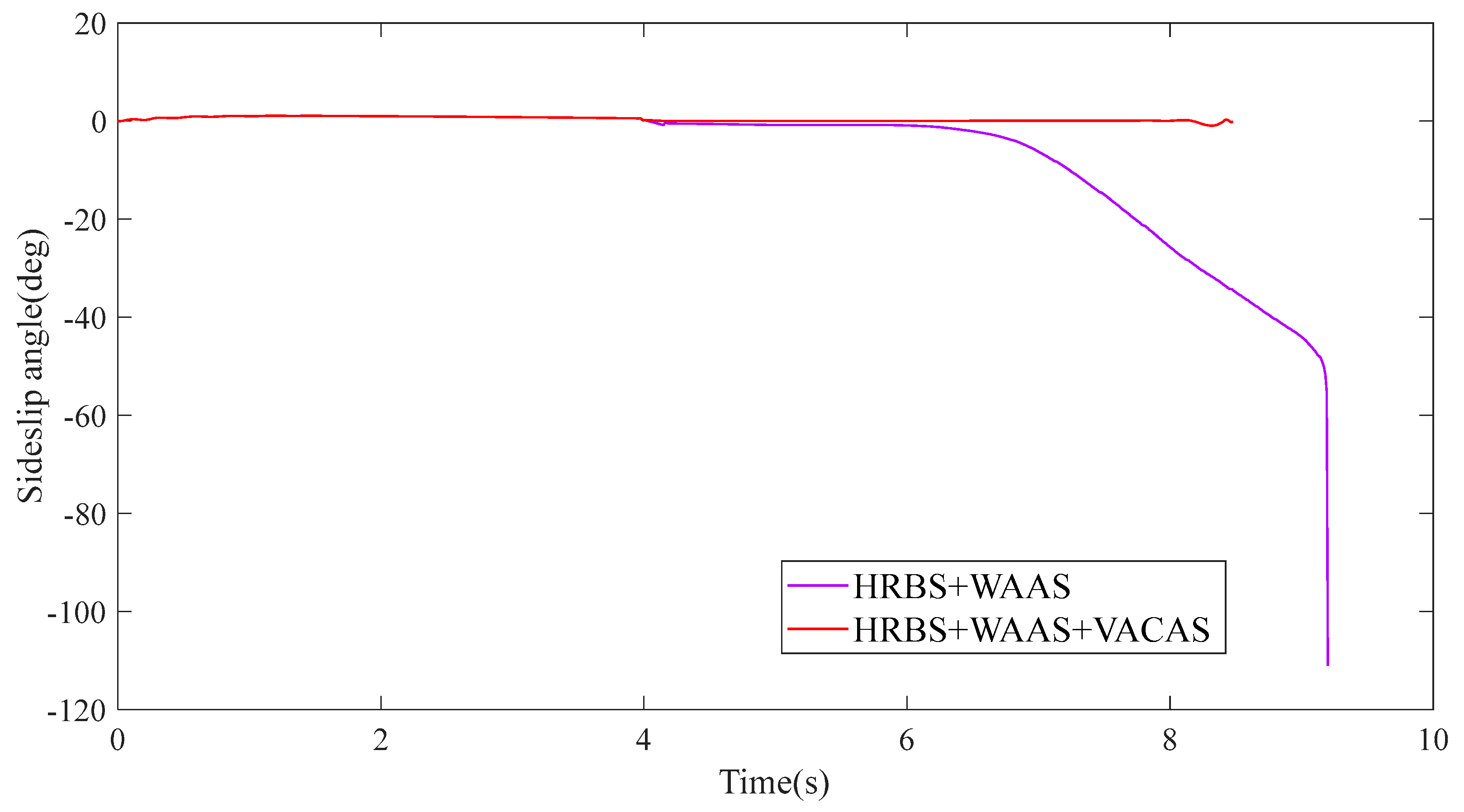
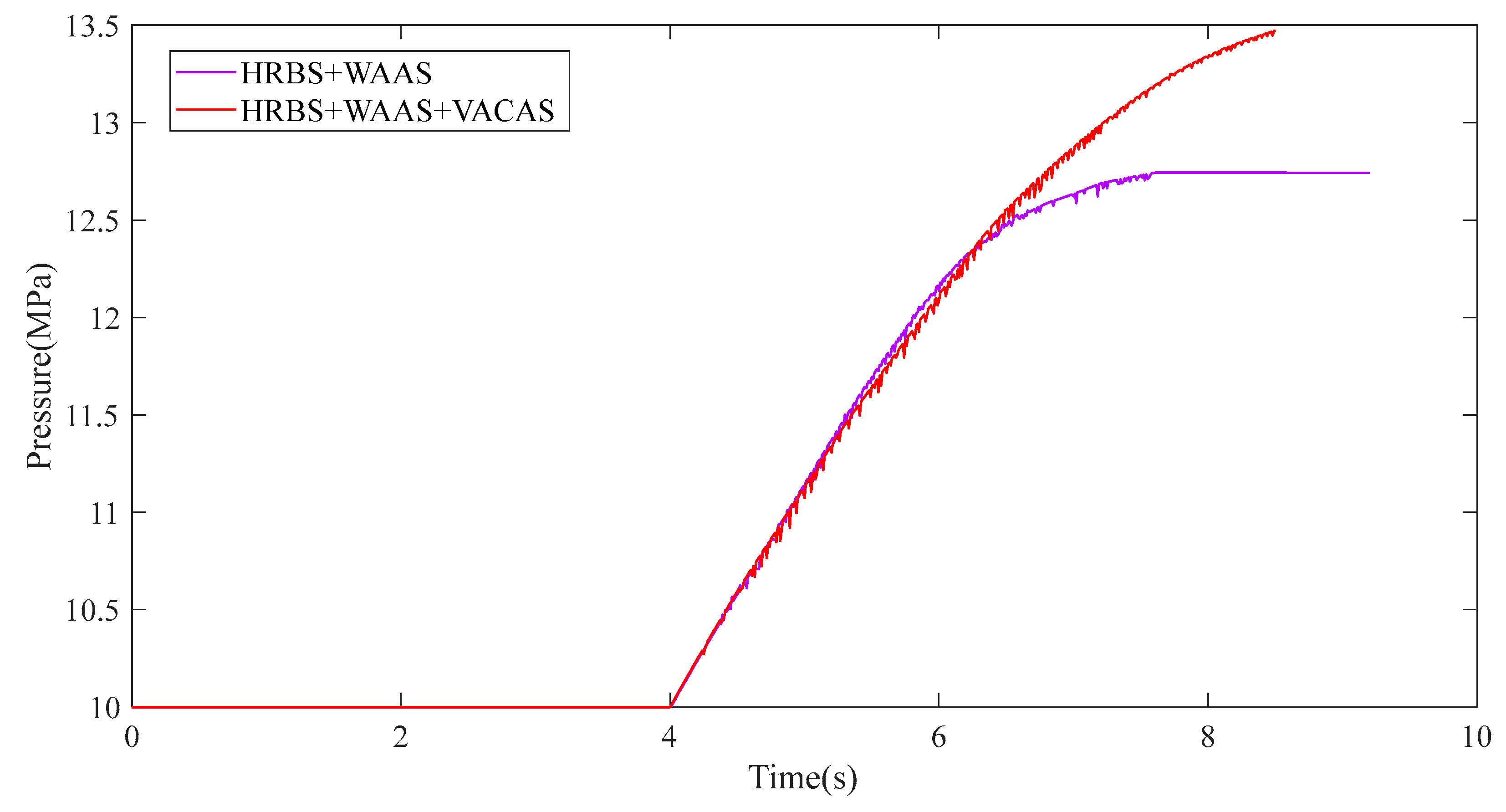
4.2. Simulation and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviation | Explanation |
| HRBS | Hydraulic Regenerative Braking System |
| WAAS | Wheel Anti-lock Actuation System |
| VACAS | Vehicle Anti-loss Control Actuation System |
| ABS | Antilock Braking System |
| SOC | State of Charge |
| ESP | Electronic Stability Program |
| ECU | Electronic Control Unit |
| CDC | Continuous Damping Control |
| EHB | Electro Hydraulic Braking |
| EMB | Electro Mechanical Braking |
| R-EPS | Pinion- Electric Power Steering |
| DP-EPS | Double Pinion- Electric Power Steering |
| 2-DOF | 2-Degree Of Freedom |
References
- Gao, Y.; Chen, L.; Ehsani, M. Investigation of the effectiveness of regenerative braking for EV and HEV. SAE Trans. 1999, 108, 3184–3190. [Google Scholar]
- Han, J.F.; Tao, J.; Lu, H.J.; Xin, D.H. Status Quo and Prospect of Regenerative Braking Technology in Electric Cars. Automot. Eng. 2014, 36, 911–918. [Google Scholar]
- Sarmiento, M.A.D.; Valdés, L.A.D.P.; Ordoñez, Y.J.R.; Pinilla, C.B.; Dulce-Diaz, D.C. Modeling and simulation of a braking energy regeneration system in hydraulic hybrid vehicles in the Colombian topography. Period. Eng. Nat. Sci. 2021, 9, 755–766. [Google Scholar] [CrossRef]
- Li, N.; Wang, Q.C.; Li, J.L. Hydraulic regenerative braking system studies based on a nonlinear dynamic model of a full vehicle. J. Mech. Sci. Technol. 2017, 31, 2691–2699. [Google Scholar] [CrossRef]
- William, J.M.; David, C. Comparison of regenerative braking technologies for heavy goods vehicles in urban environments. Automob. Eng. 2012, 226, 957–970. [Google Scholar]
- Zhang, S.P. Analysis and Design of Series Hydraulic Hybrid Vehicle System. Coal Mine Mach. 2019, 40, 74–76. [Google Scholar]
- Wang, G.; Yang, K.; Ma, C.; Wang, J.; Wang, H.M.; Wang, J.L. Energy management control strategy of parallel hydraulic hybrid bus. Chin. Hydraul. Pneum. 2022, 46, 102–109. [Google Scholar]
- Xu, Q.W.; Zhou, C.; Huang, H.; Zhang, X.F. Research on the coordinated control of regenerative braking system and ABS in hybrid electric vehicle based on composite structure motor. Electronics 2021, 10, 223. [Google Scholar] [CrossRef]
- Savitski, D.; Ivanov, V.; Shyrokau, B.; Pütz, T.; De Smet, J.; Theunissen, J. Experimental investigations on continuous regenerative anti-lock braking system of full electric vehicle. Int. J. Automot. Technol. 2016, 17, 327–338. [Google Scholar] [CrossRef]
- Yao, Y.X.; Zhao, Y.N.; Yamazaki, M. Integrated Regenerative Braking System and Anti-Lock Braking System for Hybrid Electric Vehicles & Battery Electric Vehicles. SAE Int. J. Adv. Curr. Prac. Mobil. 2020, 2, 1592–1601. [Google Scholar]
- Kim, J.; Ko, S.; Lee, G.; Yeo, H.; Kim, P.; Kim, H. Development of Co-operative Control Algorithm for Parallel HEV with Electric Booster Brake during Regenerative Braking. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, VPPC, Chicago, IL, USA, 6–9 September 2011; pp. 1–5. [Google Scholar]
- Krueger, E.; Kidston, K.; Busack, A. Reducing Disturbances Caused by Reductions in Regenerative Brake Torque; SAE Technical Paper No. 2011-01-0972; SAE International: Warrendale, PA, USA, 2011. [Google Scholar] [CrossRef]
- Le Solliec, G.; Chasse, A.; Geamanu, M. Regenerative braking optimization and wheel slip control for a vehicle with in-wheel motors. IFAC Proc. Vol. 2013, 46, 542–547. [Google Scholar] [CrossRef]
- Aksjonov, A.; Vodovozov, V.; Augsburg, K.; Petlenkov, E. Design of regenerative anti-lock braking system controller for 4 in-wheel motor drive electric vehicle with road surface estimation. Int. J. Automot. Technol. 2018, 19, 727–742. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y. Research on Efficient Braking Energy Recovery and Anti-Lock Braking Control of Electric Wheel Vehicle; Jilin University: Changchun, China, 2016. [Google Scholar]
- Mao, Y.Z.; Su, D.X.; Chen, M.X. Research on EV Regenerative Braking Cooperative ABS Control Strategy Based on Lock Prediction. SAE 2021, 75, 3316–3324. [Google Scholar]
- Chen, P.Z.; Pei, J.A.; Lu, W.Q.; Li, M.Z. A deep reinforcement learning based method for real-time path planning and dynamic obstacle avoidance. Neurocomputing 2022, 497, 64–75. [Google Scholar] [CrossRef]
- Yu, Z.S. Automobile Theory; Version 3; China Machine Press: Beijing, China, 2007. [Google Scholar]
- Andrei, A.; Klaus, A.; Valery, V. Design and Simulation of the Robust ABS and ESP Fuzzy Logic Controller on the Complex Braking Maneuvers. Appl. Sci. 2016, 6, 382. [Google Scholar] [CrossRef]
- Fan, X.; Wang, F.; Jin, K.; Xia, Q. Fuzzy logic control for vehicle stability control system with virtual prototype and experimental research. Int. J. Veh. Syst. Model. Test. 2016, 11, 1–9. [Google Scholar] [CrossRef]
- Li, J.Y.; Yang, L.J.; Yang, S.Y.; Liu, Y. ABS Control Strategy for Electric Vehicles Driven by Four Wheel Motors. Appl. Mech. Mater. 2013, 380, 512–515. [Google Scholar] [CrossRef]
- Xia, Y.S.; Wu, D.S.; Ping, L.L.; Xu, W.Y. Simulation research on braking of Tire Burst vehicle based on logic threshold. J. Yancheng Inst. Technol. (Nat. Sci. Ed.) 2021, 34, 11–16. [Google Scholar]
- Li, N.; Yang, J.R.; Jiang, J.P.; Hong, F.; Liu, Y.; Ning, X.B. Study on Speed Planning of Signalized Intersections with Autonomous Vehicles Considering Regenerative Braking. Processes 2022, 10, 1414. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KΔβ | NB | NS | Z | PS | PB | |
|---|---|---|---|---|---|---|
| KΔω | ||||||
| NB | NS | NS | NM | NB | NB | |
| NS | NS | NS | NS | NM | NB | |
| Z | PM | PS | Z | NS | NM | |
| PS | PB | PM | PM | PS | PS | |
| PB | PB | PB | PM | PS | PS | |
| Component | Parameter | Quantity |
|---|---|---|
| Mass | Kg | 1700 |
| Wheel base | m | 2.8 |
| Front wheel track | m | 1.55 |
| Rear wheel track | m | 1.55 |
| Height of center of mass | m | 0.53 |
| Distance from center of mass to front axle | m | 1.25 |
| Distance from center of mass to rear axle | m | 1.55 |
| Air drag coefficient | / | 0.28 |
| Wheel rolling radius | m | 0.315 |
| Accumulator Initial Pressure (MPa) | Accumulator Final Pressure (MPa) | Improved Efficiency(%) | |
|---|---|---|---|
| HRBS + WAAS | 10 | 12.74 | -- |
| HRBS + WAAS + VACAS | 10 | 13.47 | 26.64% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Jiang, J.; Sun, F.; Ye, M.; Ning, X.; Chen, P. A Cooperative Control Strategy for a Hydraulic Regenerative Braking System Based on Chassis Domain Control. Electronics 2022, 11, 4212. https://doi.org/10.3390/electronics11244212
Li N, Jiang J, Sun F, Ye M, Ning X, Chen P. A Cooperative Control Strategy for a Hydraulic Regenerative Braking System Based on Chassis Domain Control. Electronics. 2022; 11(24):4212. https://doi.org/10.3390/electronics11244212
Chicago/Turabian StyleLi, Ning, Junping Jiang, Fulu Sun, Mingrui Ye, Xiaobin Ning, and Pengzhan Chen. 2022. "A Cooperative Control Strategy for a Hydraulic Regenerative Braking System Based on Chassis Domain Control" Electronics 11, no. 24: 4212. https://doi.org/10.3390/electronics11244212