

Load Power Oriented Large-Signal Stability Analysis of Dual-Stage Cascaded dc Systems Based on Lyapunov-Type Mixed Potential Theory

Abstract
:1. Introduction
- (1)
- A large-signal model is constructed for a dual-stage cascaded dc system, in which two different control strategies are adopted for the feeder and the load stage.
- (2)
- A large-signal stability analysis is performed for the prototype system from the perspective of load power.
- (3)
- Lyapunov-type mixed potential theory is applied to obtain the explicit expression of the large-signal stability criterion of the system.
- (4)
- Circuit level simulation and an experimental prototype verify the correctness of the theoretical analysis.
2. Modeling of the Prototype Dual-Stage Cascaded dc System
2.1. CPL Modeling
2.2. Modeling of the Prototype System
3. Load Power Oriented Large-Signal Stability Analysis
3.1. Derivation of Load Power Oriented Stability Boundary
3.2. Bifurcation Diagram Based Analysis
3.3. Jacobian Matrix Based Analysis
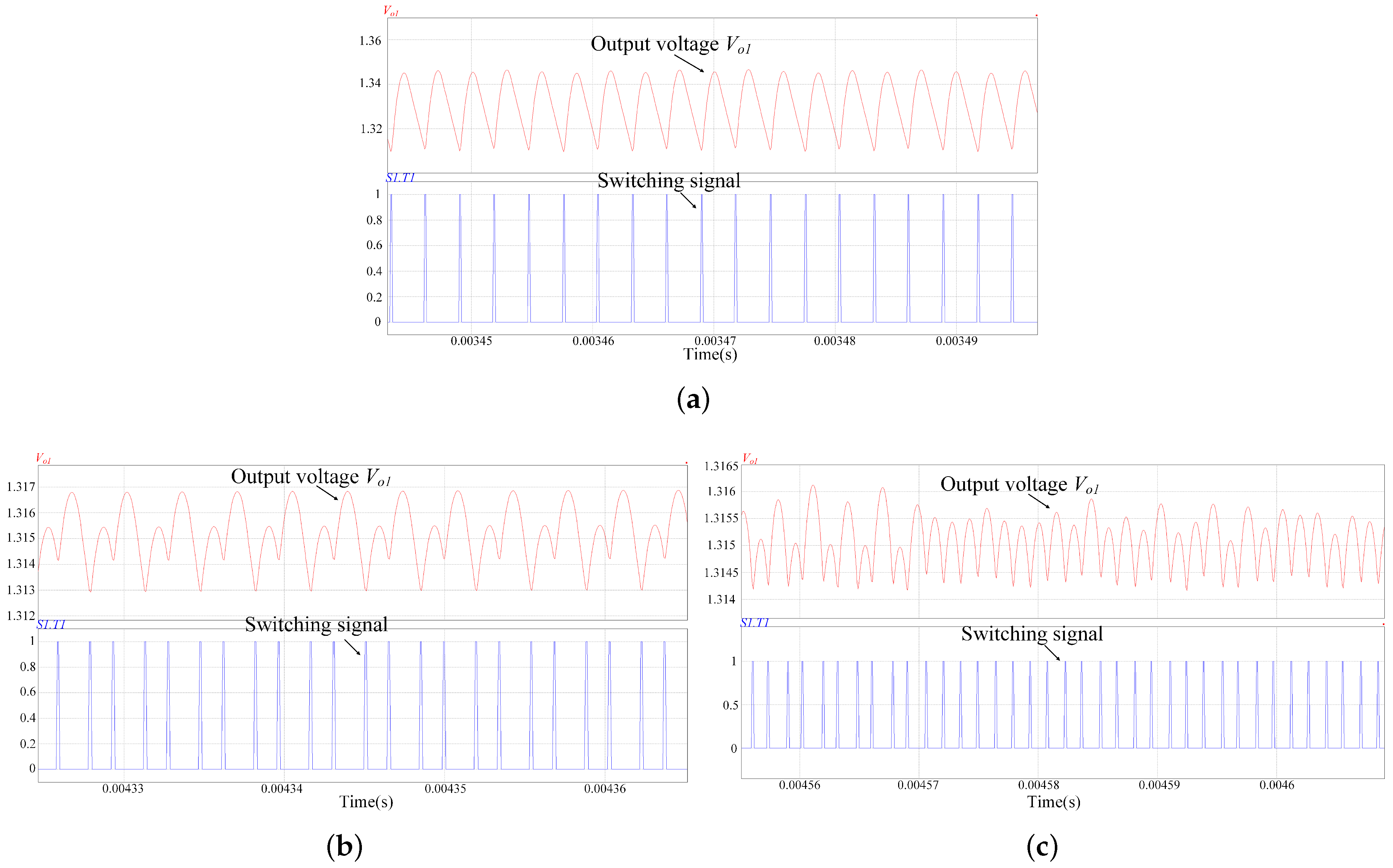
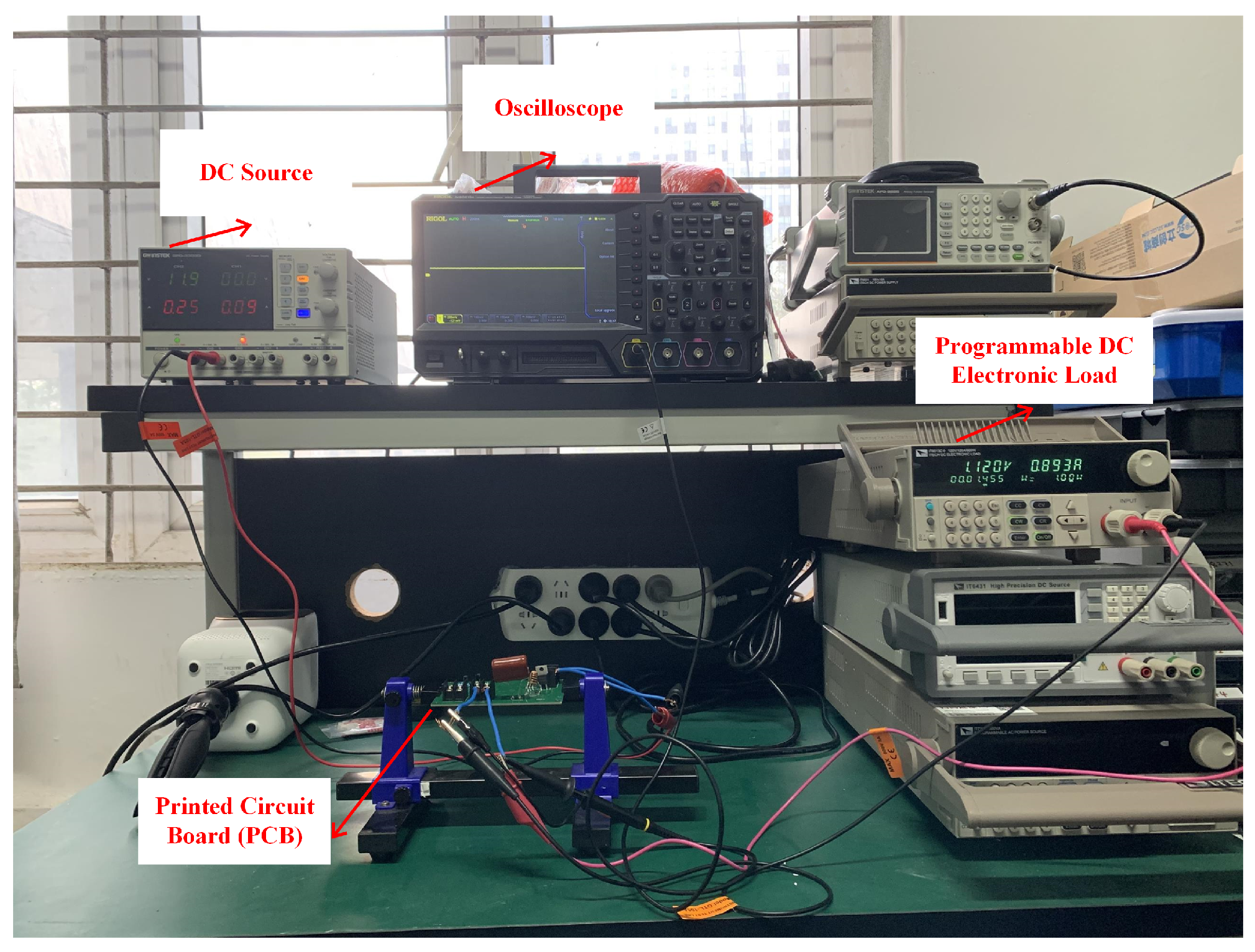
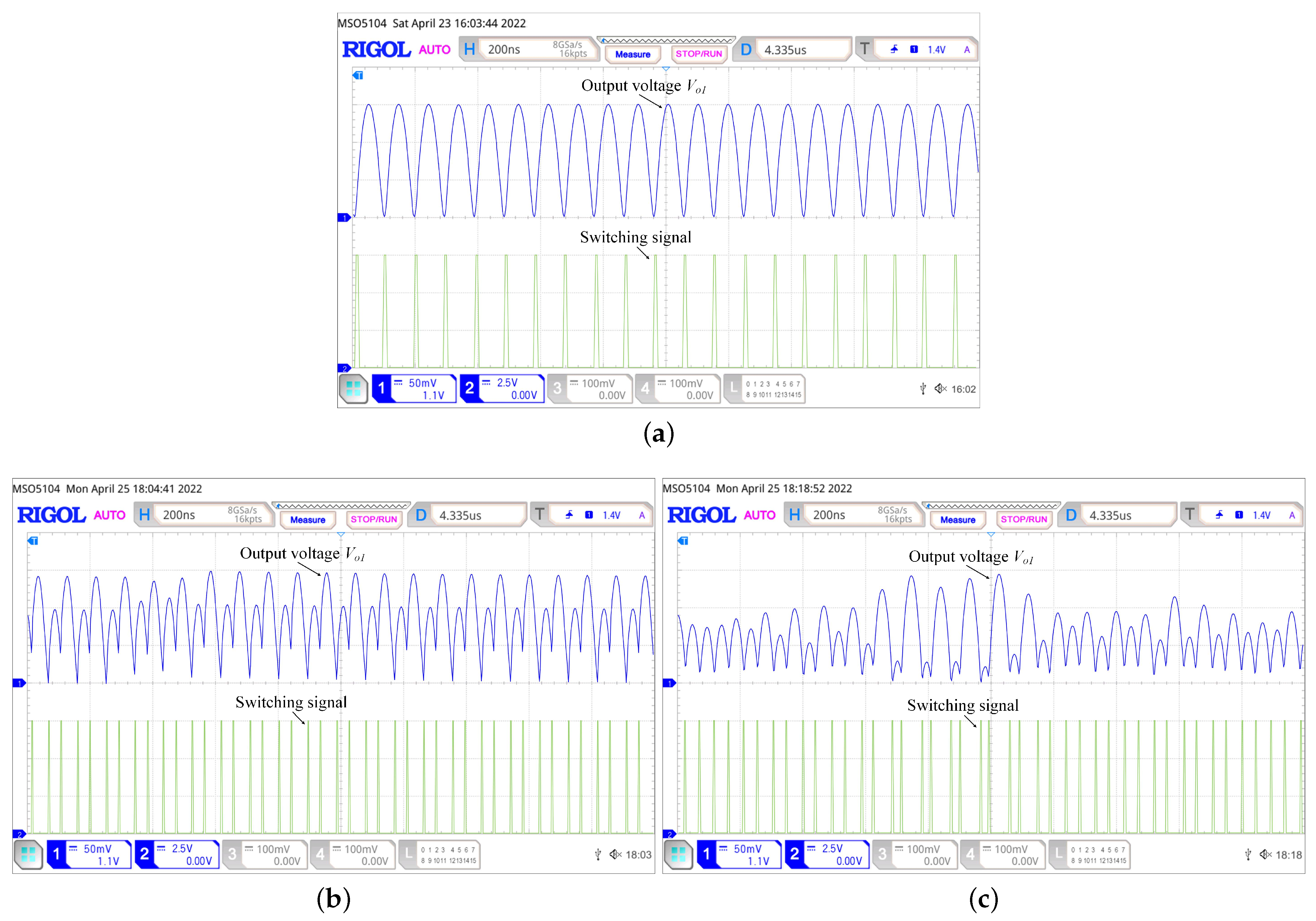
4. Circuit-Level Simulation and Experimental Validations
4.1. Circuit-Level Realization and Simulation
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cuzner, R. Does DC Distribution Make Sense? [About This Issue]. IEEE Electrif. Mag. 2016, 4, 2–3. [Google Scholar] [CrossRef]
- Nordman, B.; Christensen, K. DC Local Power Distribution: Technology, Deployment, and Pathways to Success. IEEE Electrif. Mag. 2016, 4, 29–36. [Google Scholar] [CrossRef] [Green Version]
- Luo, S. A review of distributed power systems part I: DC distributed power system. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 5–16. [Google Scholar] [CrossRef]
- Ji, H.; Xie, F.; Chen, Y.; Zhang, B. Small-Step Discretization Method for Modeling and Stability Analysis of Cascaded dc–dc Converters With Considering Different Switching Frequencies. IEEE Trans. Power Electron. 2022, 37, 8855–8872. [Google Scholar] [CrossRef]
- Mukherjee, N.; Strickland, D. Control of Cascaded DC–DC Converter-Based Hybrid Battery Energy Storage Systems—Part I: Stability Issue. IEEE Trans. Ind. Electron. 2016, 63, 2340–2349. [Google Scholar] [CrossRef] [Green Version]
- Mukherjee, N.; Strickland, D. Control of Cascaded DC–DC Converter-Based Hybrid Battery Energy Storage Systems—Part II: Lyapunov Approach. IEEE Trans. Ind. Electron. 2016, 63, 3050–3059. [Google Scholar] [CrossRef] [Green Version]
- Singh, S.; Gautam, A.R.; Fulwani, D. Constant power loads and their effects in DC distributed power systems: A review. Renew. Sustain. Energy Rev. 2017, 72, 407–421. [Google Scholar] [CrossRef]
- He, B.; Chen, W.; Mu, H.; Zhan, D.; Zhang, C. Small-Signal Stability Analysis and Criterion of Triple-Stage Cascaded DC System. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2576–2586. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Z.; Zhou, Z.; Chu, Z.; Zeng, Y.; Qiu, Z. A Floquet Theory-Based Stability Analysis Method for Cascaded DC-DC Converters by Combining with the Describing Function of PWM Link. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 2841–2846. [Google Scholar] [CrossRef]
- Ding, L.; Wong, S.-C.; Tse, C.K. Bifurcation Analysis of a Current-Mode-Controlled DC Cascaded System and Applications to Design. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3214–3224. [Google Scholar] [CrossRef]
- El Aroudi, A.; Haroun, R.; Al-Numay, M.S.; Calvente, J.; Giral, R. Fast-Scale Stability Analysis of a DC–DC Boost Converter With a Constant Power Load. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 549–558. [Google Scholar] [CrossRef]
- Wu, H.; Pickert, V.; Ma, M.; Ji, B.; Zhang, C. Stability Study and Nonlinear Analysis of DC–DC Power Converters With Constant Power Loads at the Fast Timescale. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3225–3236. [Google Scholar] [CrossRef] [Green Version]
- Hu, W.; Yang, R.; Wang, X.; Zhang, F. Stability Analysis of Voltage Controlled Buck Converter Feed From a Periodic Input. IEEE Trans. Ind. Electron. 2021, 68, 3079–3089. [Google Scholar] [CrossRef]
- Rahimi, A.M.; Emadi, A. An Analytical Investigation of DC/DC Power Electronic Converters With Constant Power Loads in Vehicular Power Systems. IEEE Trans. Veh. Technol. 2009, 58, 2689–2702. [Google Scholar] [CrossRef]
- Wang, B.; Chen, D.; Chen, C.-J.; Hsiao, S.-F. Stability Prediction of Integrated-Circuit Based Constant ON-Time Controlled Buck Converters. IEEE Trans. Power Electron. 2021, 36, 6838–6849. [Google Scholar] [CrossRef]
- Brayton, R.K.; Moser, J.K. A theory of nonlinear networks. I. Quart. Appl. Math. 1964, 22, 1–33. [Google Scholar] [CrossRef] [Green Version]
- Brayton, R.K.; Moser, J.K. A theory of nonlinear networks. II. Quart. Appl. Math. 1964, 22, 81–104. [Google Scholar] [CrossRef] [Green Version]
- Weiss, L.; Mathis, W.; Trajkovic, L.L. A generalization of Brayton-Moser’s mixed potential function. IEEE Trans. Circuits Syst. I 1998, 45, 423–427. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Ge, X.; Su, M.; Han, H.; Xiong, W.; Gui, Y. Complete Large-signal Stability Analysis of DC Distribution Network via Brayton-Moser’s Mixed Potential Theory. IEEE Trans. Smart Grid 2022, 2022, 1. [Google Scholar] [CrossRef]
- Ahmed, M.S.; Fayed, A.A. A Current-Mode Delay-Based Hysteretic Buck Regulator With Enhanced Efficiency at Ultra-Light Loads for Low-Power Microcontrollers. IEEE Trans. Power Electron. 2020, 35, 471–483. [Google Scholar] [CrossRef]
- Hsu, S.; Chen, C.; Tsai, C. A High Frequency Power and Area Efficienct Charge-Pump-Constant-On-Time Controlled DC-DC Converter Based on Dynamic-Biased Comparator with 50mV Droop and 2us 1% Settling Time for 1.15A/1ns Load Step. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 2980–2983. [Google Scholar] [CrossRef]
- Ming, X.; Xin, Y.; Li, T.; Liang, H.; Li, Z.; Zhang, B. A Constant On-Time Control With Internal Active Ripple Compensation Strategy for Buck Converter With Ceramic Capacitors. IEEE Trans. Power Electron. 2019, 34, 9263–9278. [Google Scholar] [CrossRef]
- Bizzarri, F.; Nora, P.; Brambilla, A. Closed-Form Operational Boundaries for Buck Converters With Constant On-Time Control. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3331–3335. [Google Scholar] [CrossRef]
- Tsai, C.; Chen, B.; Li, H. Switching Frequency Stabilization Techniques for Adaptive On-Time Controlled Buck Converter With Adaptive Voltage Positioning Mechanism. IEEE Trans. Power Electron. 2016, 31, 443–451. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Jiang, W.; Wang, J.; Wang, P.; Wu, X. A Novel Assorted Nonlinear Stabilizer for DC–DC Multilevel Boost Converter With Constant Power Load in DC Microgrid. IEEE Trans. Power Electron. 2020, 35, 11181–11192. [Google Scholar] [CrossRef]
- Hariharan, K.; Kapat, S.; Mukhopadhyay, S. Constant On-Time Multi-Mode Digital Control with Superior Performance and Programmable Frequency. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 1344–1350. [Google Scholar] [CrossRef]
- Olsson, E. Constant-power rectifiers for constant-power telecom loads. In Proceedings of the 24th Annual International Telecommunications Energy Conference, Montréal, QC, Canada, 29 September–3 October 2002; pp. 591–595. [Google Scholar] [CrossRef]
- Cupelli, M.; Zhu, L.; Monti, A. Why Ideal Constant Power Loads Are Not the Worst Case Condition From a Control Standpoint. IEEE Trans. Smart Grid 2015, 6, 2596–2606. [Google Scholar] [CrossRef] [Green Version]
- Lin, G.-Y.; Chen, D.; Chen, Y.-J. The DCM stability issue of voltage regulators using a current-mode constant on-time controller control. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 813–816. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| /H | 15 | /F | 100 |
| /H | 15 | /F | 100 |
| /m | 65 | /V | 1.25 |
| /m | 10 | /V | 12 |
| / | 100 | /S | 16 |
| /k | 10 | /S | 10 |
| R/ | 10 | /A | 1.5 |
| /W | [5, 35] |
| P(W) | Eigenvalues | Modulus | State |
|---|---|---|---|
| 5.5 | −1.0279 | 0.8376 | Period-doubling bifurcation |
| 0.8641 | |||
| −0.8633 + j0.3039 | |||
| −0.8633 − j0.3039 | |||
| 5.8 | −0.9703 | 0.8233 | Stable |
| 0.8078 | |||
| −0.8381 + j0.3478 | |||
| −0.8381 − j0.3478 | |||
| 23.2 | −0.9855 | 0.8045 | Stable |
| 0.8033 | |||
| −0.7849 + j0.4341 | |||
| −0.8633 − j0.4341 | |||
| 23.5 | −1.0284 | 0.8163 | Period-doubling bifurcation |
| 0.8435 | |||
| −0.8151 + j0.3898 | |||
| −0.8151 − j0.3898 | |||
| 32.8 | −1.3831 | 0.9145 | Period-doubling bifurcation |
| 0.9145 | |||
| −0.9029 + j0.3151 | |||
| −0.9029 − j0.3151 | |||
| 33.1 | −1.4335 | 1.0219 | Border collision bifurcation |
| 0.9622 | |||
| −0.9811 + j0.2437 | |||
| −0.9811 − j0.2437 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Chen, X.; Zheng, F.; Ma, H.; Zhu, B. Load Power Oriented Large-Signal Stability Analysis of Dual-Stage Cascaded dc Systems Based on Lyapunov-Type Mixed Potential Theory. Electronics 2022, 11, 4181. https://doi.org/10.3390/electronics11244181
Chen Z, Chen X, Zheng F, Ma H, Zhu B. Load Power Oriented Large-Signal Stability Analysis of Dual-Stage Cascaded dc Systems Based on Lyapunov-Type Mixed Potential Theory. Electronics. 2022; 11(24):4181. https://doi.org/10.3390/electronics11244181
Chicago/Turabian StyleChen, Zhe, Xi Chen, Feng Zheng, Hui Ma, and Binxin Zhu. 2022. "Load Power Oriented Large-Signal Stability Analysis of Dual-Stage Cascaded dc Systems Based on Lyapunov-Type Mixed Potential Theory" Electronics 11, no. 24: 4181. https://doi.org/10.3390/electronics11244181