1. Introduction
Various routing protocols for IoT have been proposed in the literature. Reactive, proactive, and hybrid methods are the most common [
1]. In proactive routing, each node maintains an up-to-date routing table. To detect variations in the network, the nodes broadcast some control messages in the network. The reactive protocols are on demand: the source nodes generate some routing message whenever they need to send some data. Routing messages are flooded throughout the entire network. This mechanism is known as route discovery. When a path is determined, bandwidth is employed to communicate information [
2]. Both protocols have advantages and disadvantages.
The type of network, features, and capabilities of nodes have a noteworthy effect on the efficiency or performance of various protocols. For example, nodes with higher mobility ratios outperform others when using the dynamic source routing (DSR) protocol [
3]. According to this fact, we can assume that highly mobile nodes favor pure reactive protocols. Similarly, proactive protocols improve their packet delivery ratio (PDR) as the network size increases [
4]. Additionally, proactive routing strategies result in fewer end-to-end delays. A hybrid of reactive and proactive protocols has been proposed by many researchers. Zone routing protocol (ZRP) [
5] is the simplest basic hybrid protocol. The proactive routing is limited to the node’s immediate proximity in this routing protocol. The major goal is to reduce total network costs while taking into account the advantages and disadvantages of both types of reactive and proactive protocols.
Hybrid routing technologies combine reactive and proactive routing capabilities. The network is split into several sections in such protocols. The most typical option is to divide the network into zones or clusters [
6]. If we partition a network into heterogeneous clusters or zones, there will be no use for the heterogeneity of member nodes within these segments. If we do not bind the nodes to a certain location, the heterogeneous routing protocols can be more efficient. Furthermore, the formation and frequent update of clusters, as well as the nomination of cluster heads (CHs), may result in additional node overhead [
7]. Both clustered and non-clustered networks should be covered by the technique.
Multiple routing protocols can be used in the same network. In other words, by utilizing some gateway nodes, many different ad hoc networks can be merged into a single heterogeneous ad hoc network (HANETs). The basic goal of a larger network is to share and optimize resources [
8]. Different nodes can use the help of other network nodes to get shorter pathways and transfer data to inaccessible nodes. The resourceful CHs are commonly regarded to be the gateway nodes [
9]. Any programmable node should be assigned to the role of the gateway node. Furthermore, the role of gateway nodes in a heterogeneous network should not be confined to connecting distinct nodes. There should be a framework in place that allows gateway nodes to choose their own routing behavior. When choosing their routing behavior, nodes should take into account both their own parameters and the capabilities of the network. A node with proactive neighborhood, for instance, should adopt proactive routing. Similarly, in order to use less energy, nodes with lower remaining energies should switch to reactive routing. While communicating with other gateways and ordinary network nodes, gateway nodes should be able to intelligently choose a routing behavior.
Game theory (GT) is an economics and mathematics branch, but can be applied to any discipline to help people choose between several solutions. In the realm of networking, the GT technique is employed for a variety of objectives. Routing creation, application focus, network security, and network administration are the four fundamental factors that are used to model the relationship between wireless networks and GT [
10]. The major goal of incorporating GT in wireless ad hoc networks is to construct a decision-making system in each node to enhance the performance of a network. To achieve improved throughputs, delays, energy consumption, and packet delivery ratios (PDR), GT is used to create routing algorithms for various types of ad hoc networks [
9].
Smart nodes capable of understanding both reactive and proactive routing protocols are introduced in the proposed system. Such nodes will intelligently modify their routing behavior in response to network requirements and data traffic. These nodes serve as interfaces between nodes that have distinct routing protocols. By using such nodes, many heterogenous networks can be merged into a more efficient and larger network. The nodes in distinct networks with different routing protocols can be made to connect with each other to reduce delays in data transfer, boost dependability, and lessen energy usage. The routing protocol that will be used among the proposed smart nodes will also be studied and developed using a game-theoretic model. The smart nodes will be able to select the optimal routing protocol for their individual benefit and the benefit of the overall network.
The rest of the paper is organized as follows: The literature review is given in
Section 2;
Section 3 elaborates the proposed mechanism; the simulation results for different scenarios are given in
Section 4; and lastly, in
Section 5 the conclusion and future work are discussed.
2. Related Work
In ad hoc networks, GT can be used for a variety of purposes. GT has been used to create routing protocols for several types of ad hoc networks [
10]. The major goal is to meet the QoS requirements. A ZRP-like GT-based protocol has been proposed by Selvi et al. [
11]. In this mechanism, the node extinction rate is calculated to manage the network architecture. Moreover, to improve ad hoc QoS routing, a routing protocol based on the energy efficiency of zones is devised. This research describes a new way of enhancing the energy economy of ZRP-based protocols that control network topology by guessing node life expectancy. Furthermore, to increase QoS parameters, a game is paired with an efficient ZRP-based protocol. The authors state that the main objectives are to a) manage network topology according to the energy consumption rate; and b) improve QoS-aware techniques in terms of bandwidth, PDR, and some other parameters. Das and Tripathy [
9] presented a technique that solely focuses HANETs. It focuses on cluster-based heterogeneous networks and comprises six phases. The GT model that is employed is a non-cooperative one. The basic goal is to construct clusters in a HANET as quickly as possible. The mixed strategies of several heterogeneous nodes are optimized using linear programming and GT.
A transmission power control-based strategy is described in the paper [
12], which allows mobile nodes to balance transmission rate and power consumption to achieve a trade-off between transmission rate and power consumption. For each node, two tables define and update the average transmission rate as well as the amount of time the neighboring node is used for data transfer.
Some GT-based routing methods in ad hoc networks are primarily concerned with security. For device-to-device networks, Lv et al. [
13] have suggested a secure GT-based routing algorithm. This proposed method operates in cluster-based networks. All data traffic is redirected through some secure routes that have been defined.
GT has been used by the authors to develop simple routing and load-balancing protocols. There is no mechanism in these strategies to handle diverse nodes in a wider network. The majority of GT-based routing methods place a premium on selfish node management. Zheng [
14] proposes a reliable GT-based routing technique for a wireless sensor network (WSN) with certain selfish nodes. To balance resource consumption and reliability, a game model is applied. For resource-constrained network nodes, the network’s global information is not necessary. Furthermore, all nodes are free to act selfishly under this technique. Each player node’s four primary elements are taken into account in this proposed effort. This study takes into account transmission power, connectivity, dependability, and collision. Furthermore, network node heterogeneity is supported by the findings.
In recent years, a number of studies have been published proposing hybrid routing methods. The main focus of the majority of research projects has been on improving QoS parameters. The major goal is to improve targeted ad hoc networks by taking into account the following factors: latency, node energy, PDR, routing and processing overhead, and throughput [
15]. ZRP [
16] is a basic hybrid routing protocol that has been developed for many sorts of ad hoc networks. Various upgraded or modified variants of ZRP have been proposed in recent literature.
The “Dynamic Relationship-Zone Routing Protocol” (DRZRP) [
17] is a ZRP-based protocol that focuses on relational zones rather than normal ZRP zones. The mechanism states that it is obvious for some nodes to communicate with non-zonal nodes on a regular basis. The zones, with a specified radius, are created based on the frequency of data transmission among the nodes. These zones are dynamically maintained, and the DRZRP algorithm decides proactive routing behavior inside these zones. This work is mainly concentrated on the delays and communication and processing overhead.
A sleep scheduling protocol based on ZRP has been proposed by Shanthy and Padma [
18]. In this mechanism, the nodes are separated into zones and assigned to each zone with a zone leader. The selection of zone leader is based on residual energy, proximity, distance from the border, and link quality. To ensure load balancing, the zone leader detects many routes from border nodes to the target and distributes traffic along these channels. A sleep-duty cycling system that can be adjusted is also put in place. This is done so that energy is conserved at border nodes. The method is similar to other approaches that combine cluster-based processes with a sleep scheduling algorithm.
An enhanced ZRP protocol for vehicular ad hoc networks (VANETs) [
19] has been proposed to efficiently meet diverse traffic circumstances. The zones are replaced with clusters in this technique, and some clustering mechanisms are used. The normal clustering mechanisms influence the majority of the work. Gasmi et al. [
20] offer yet another modified ZRP. The writers of this study concentrate on the quality of service in the Internet of Vehicles (IoV). By utilizing the QoS function based on various parameters, a ZRP-based link-state mechanism is presented to improve IoV applications’ link stability.
For WSNs, the “State Aware Link Maintenance Approach” (SALMA) [
15], a hybrid routing protocol, has been proposed. DSR and OLSR are used as the base protocols for the SALMA. There are three types of nodes: black, grey, and white. The classes are created based on the nodes’ activity status. During routing and data transfer, these various nodes use DSR, OLSR, or both protocols. This protocol was created specifically for WSNs and is therefore not useful in HANETs. In [
21], several authors suggest that for MANETs, a dynamic cuckoo search (DCS) be combined with a hybrid zone-based hierarchical routing protocol (ZHRP). This mechanism focuses on improving interzone and intrazonal routing links.
Multimode routing protocols fall within the hybrid routing protocols category. These technologies make it simple for network nodes to switch between routing techniques. Different nodes in the same network may use different routing behaviors at the same time. Heo et al. [
22] have suggested a hybrid routing system that allows nodes to vary their routing behavior. Each node in the network establishes its own routing protocol by examining several parameters at the start. The nodes do not change their routing protocols once they have been configured. Hoebeke and Demeester suggest another multimode routing scheme in their article [
23]. Here, each node in the network has the ability to select a single routing mode and there are three primary modalities that are discussed: proactive, reactive, and flooding. The entireties in the routing table are also tagged with each node’s mode. A single routing database is used for all the network nodes. The base reactive and proactive protocols are AODV and WRP. This work does not address HANETs.
The authors in [
24] propose a multipath heterogeneous ad hoc network “MHAR-OLSR” that combines MANET, FANET and VANET nodes. This multipath routing protocol uses a uniform communication language for heterogeneous ad hoc network components while taking into account their individual properties—transmission range, location, and speed. Four key components are the focus of this work: path classification, path computation, node identification and path selection. The TCMs are also modified in this work in order to achieve its objectives. Hauge et al. [
25] outline an experiment with a depth first search (DFS) routing protocol that can be used as an inter-network routing protocol to establish a federated network that was conducted during the Coalition Warrior Interoperability eXercise (CWIX) 2019. The authors claim that their proposed work can be used in heterogeneous networks that have an interconnect overlay architecture. The authors also claim that this mechanism works very well with low-data-rate transmission technologies.
In [
26], an autonomous cluster-based routing protocol is proposed. Some autonomous clusters are defined in heterogeneous MANETs. The proposed mechanism has the ability to efficiently route data in different domains. The gateways between different MANETs are designed to adaptively behave according to the nature of the data.
Table 1 shows summary of relevant articles.
3. Proposed Mechanism
The proposed study’s major goal is to design and create a network that uses many routing protocols to function together. In a single network, heterogeneity is measured in terms of distinct routing protocols. There may be nodes in a heterogeneous network with varying capabilities and parameters. Energy level, energy consumption ratio, mobility ratio, PDR, and so on are examples of these parameters. The nodes are meant to utilize a specific routing protocol based on the type of parameters.
Some intelligent nodes, known as smart nodes, are programmed to comprehend the routing behavior of various underlying heterogeneous nodes. By acting as gateways between the heterogeneous nodes, these nodes make it easier for them to communicate with one another. Furthermore, when these smart nodes communicate with one another, the most appropriate default routing behavior for them can be established to enhance the overall network’s performance. A game-theory based on the prisoner’s dilemma is used to change default routing behavior. This is an evolutionary process in which nodes evaluate the required parameters over time and adjust their routing behavior accordingly.
Two basic routing protocols are chosen to be employed to connect the nodes in the underlying ad hoc network. These protocols can be of any type. We generalize this by taking the two categories of reactive and proactive protocols. For communication, all the smart nodes can utilize one or both protocols. The preprogrammed nodes operate on a particular routing protocol and cannot be adapted. The smart nodes can include both routing characteristics.
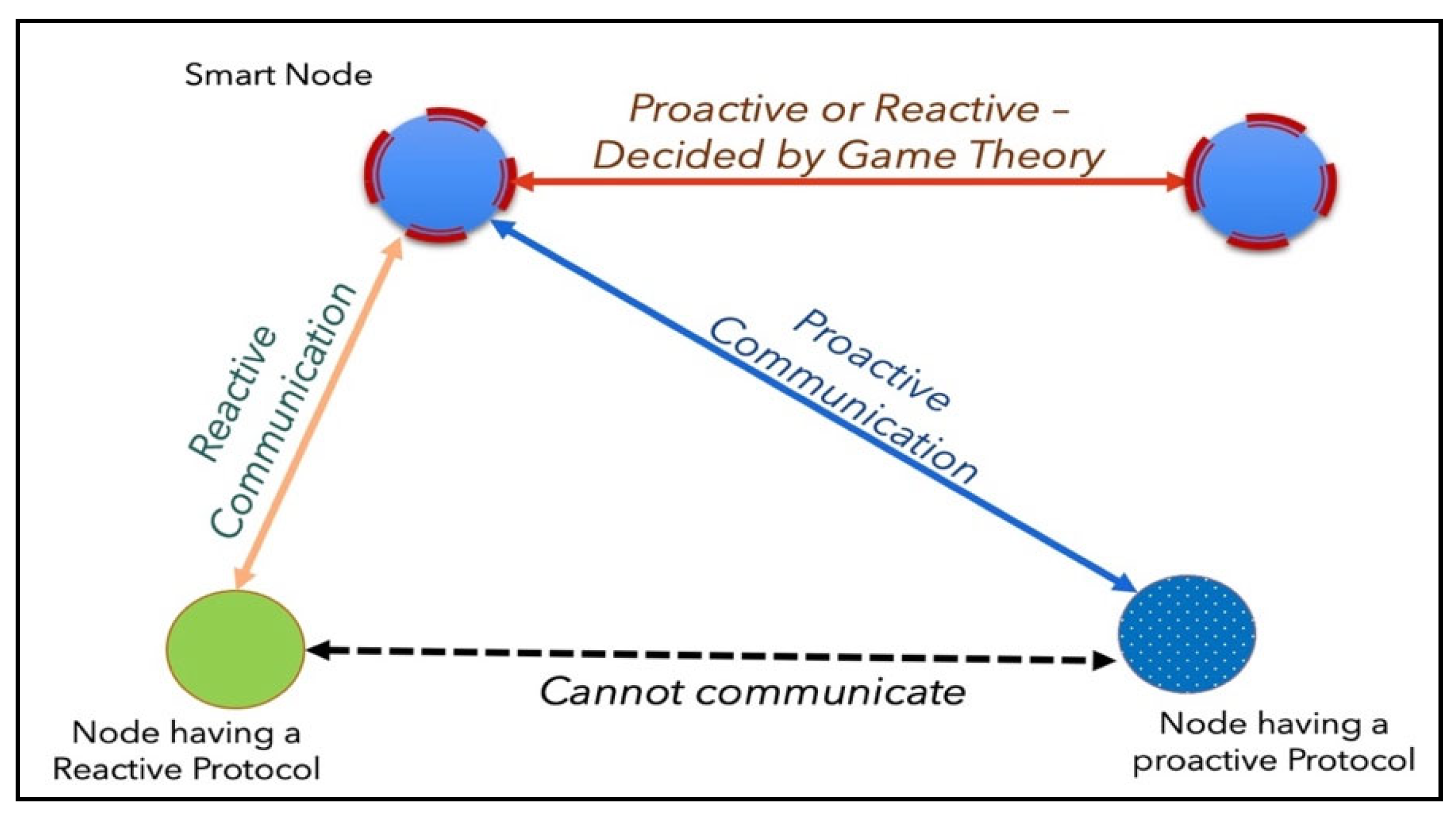
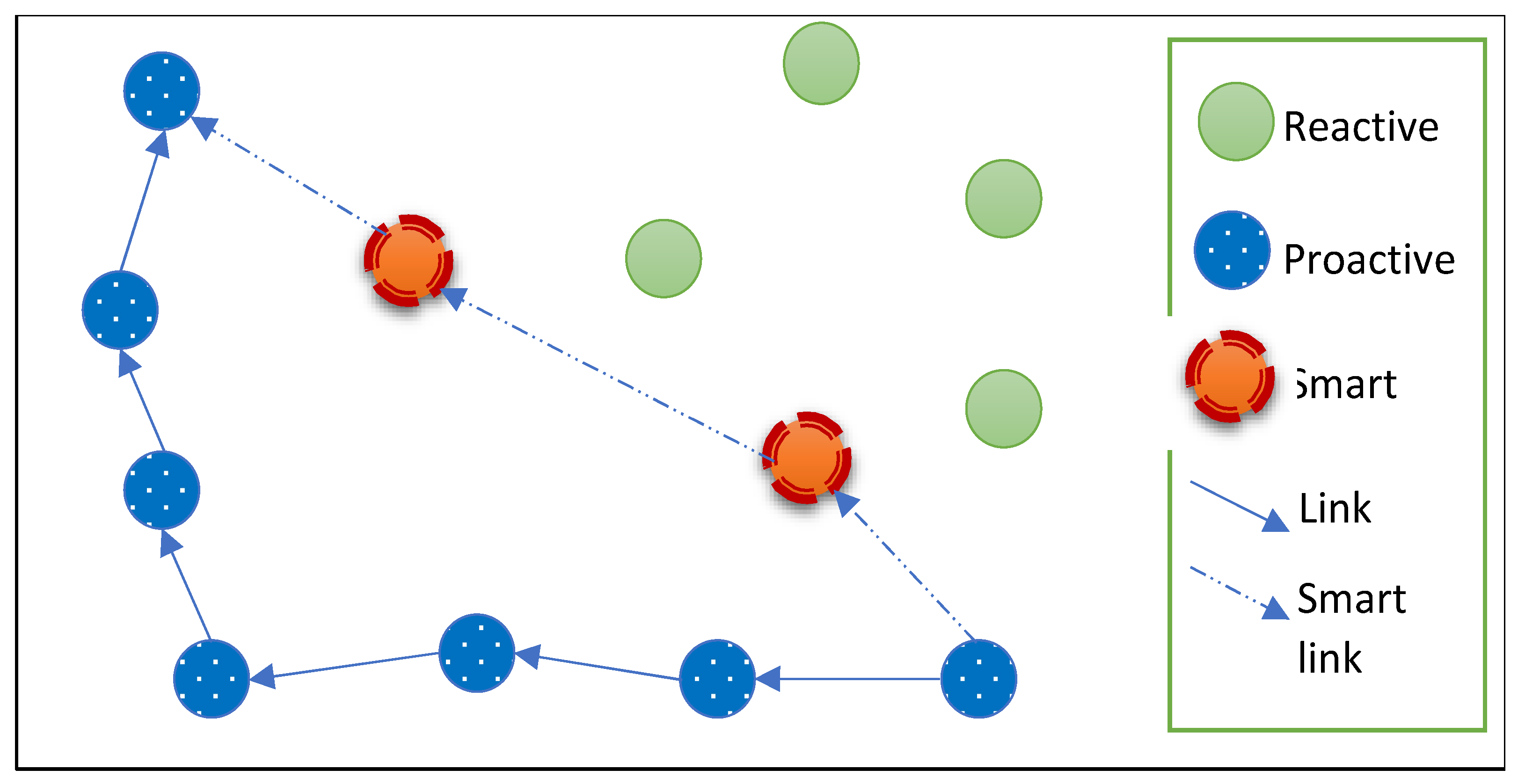
Figure 1 depicts the three different classes of nodes. The nodes are classified based on their behavior. A HANET can be created by joining two or more networks that each have proactive and reactive nodes.
With the help of
Figure 1, the routing capacity of smart nodes can be explained. In this diagram, a smart node communicates proactively with a proactive node while also being perceived as a member of its own family by a reactive node. Depending on their preferences and the GT, smart nodes adjust their routing behavior towards other smart nodes. A smart node can also operate as a connector between two separate nodes.
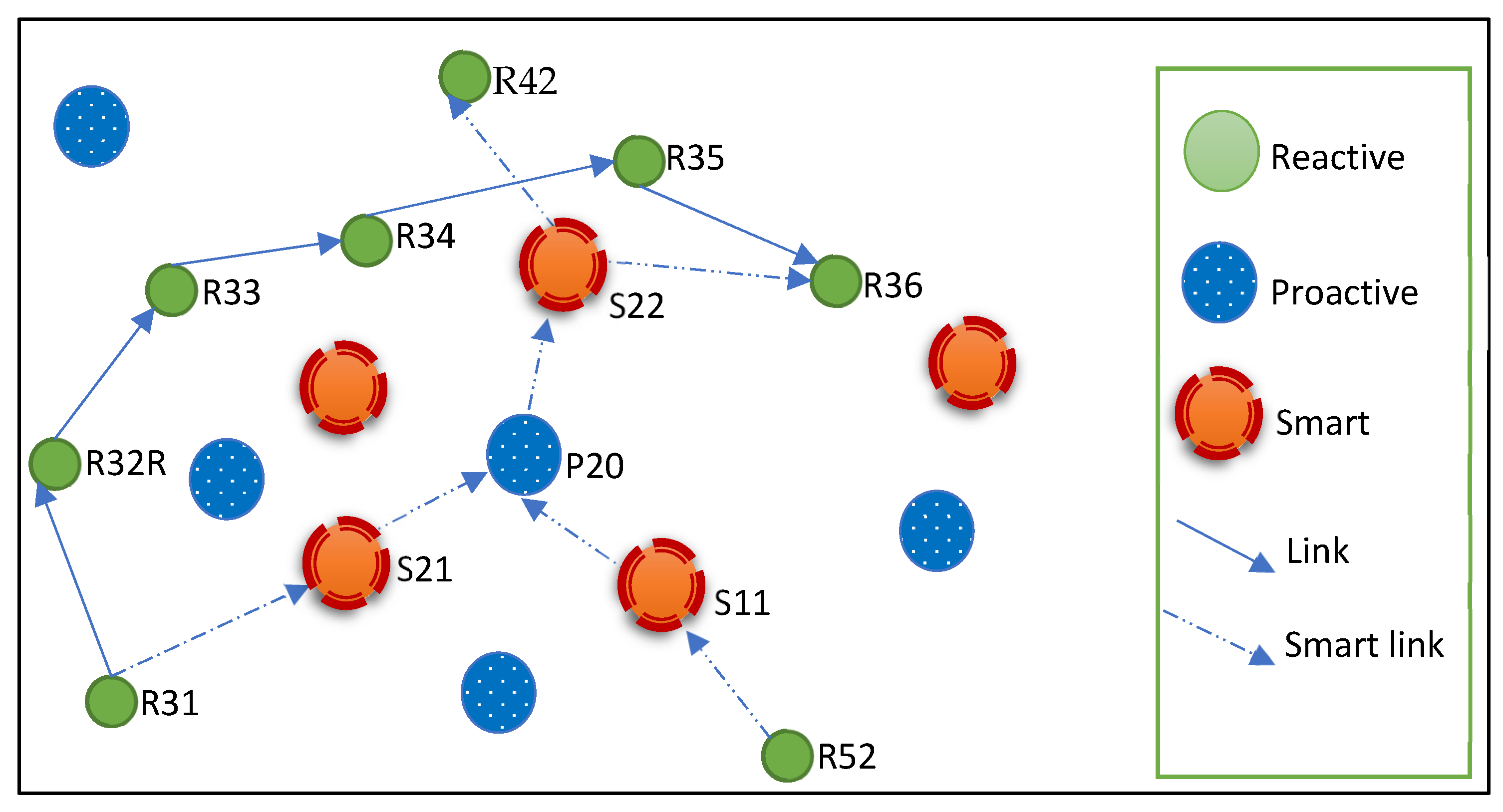
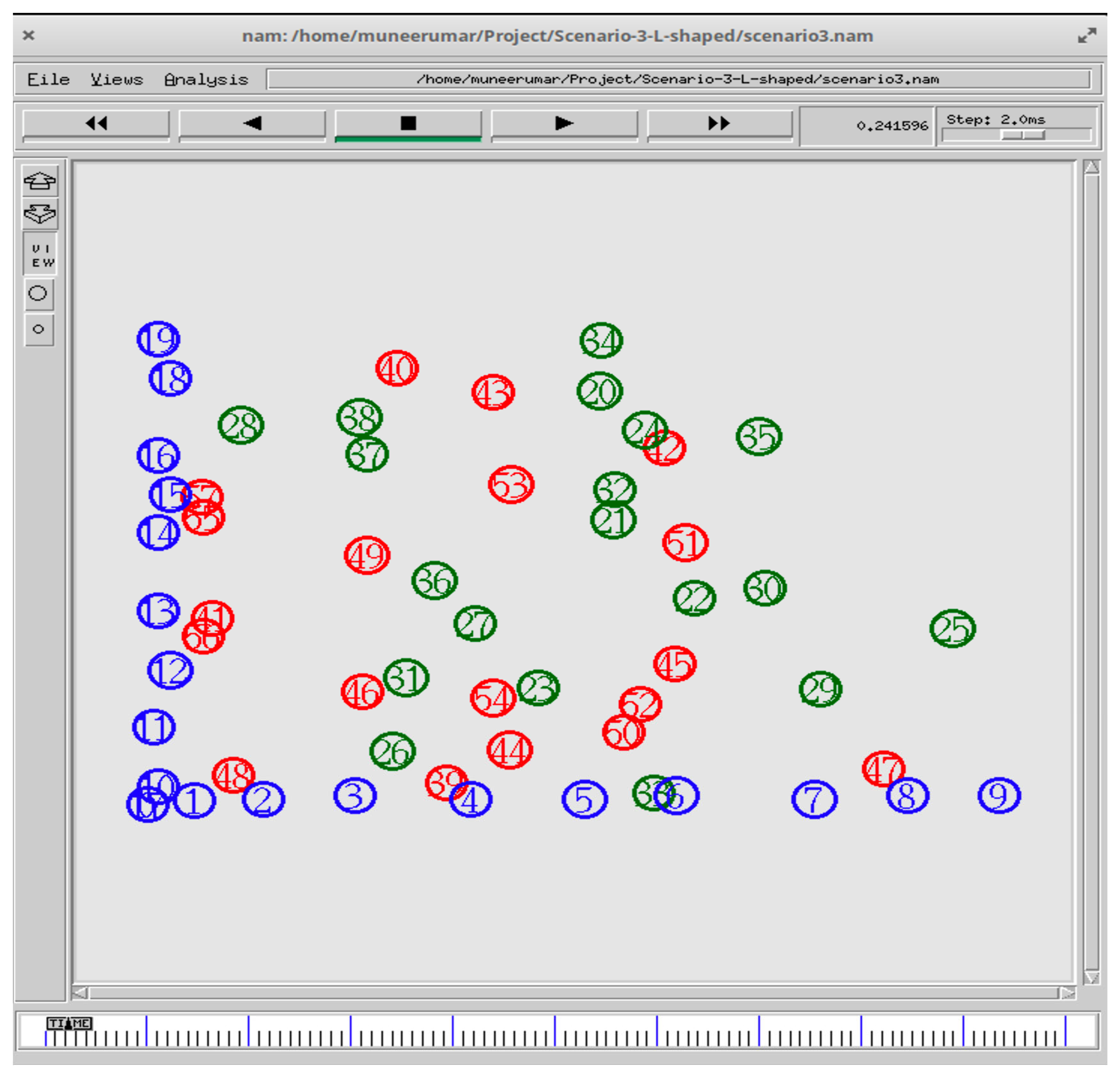
Figure 2 depicts a small network with heterogeneous nodes using three different routing strategies: proactive, reactive, and smart routing. There are five proactive and eight reactive nodes. This network could alternatively be thought of as a hybrid of two networks combined with the help of some smart nodes. Nodes with similar routing protocols may usually communicate with one another. The proposed smart routing technique, on the other hand, allows nodes with various routing protocols to communicate more effectively. The image depicts two sample scenarios, which are further detailed in
Table 2:
We have two noteworthy cases, as shown in
Figure 2 and
Table 2. Both the source and destination nodes (R31 and R36) in the first scenario use a reactive routing protocol. A shorter route can be established by involving nodes from different classes when employing the proposed smart nodes. In case 2, two reactive nodes (R52 and R42) cannot connect to each other. These reactive nodes can be linked by enlisting the help of a proactive node and the proposed smart nodes.
This section is further broken into the following subsections: in
Section 3.1, several sample network scenarios are given.
Section 3.2 discusses the network’s key assumptions and characteristics. The game model is explained in
Section 3.3, and the structure and actions of smart nodes are explained in
Section 3.4.
3.1. Case Scenarios
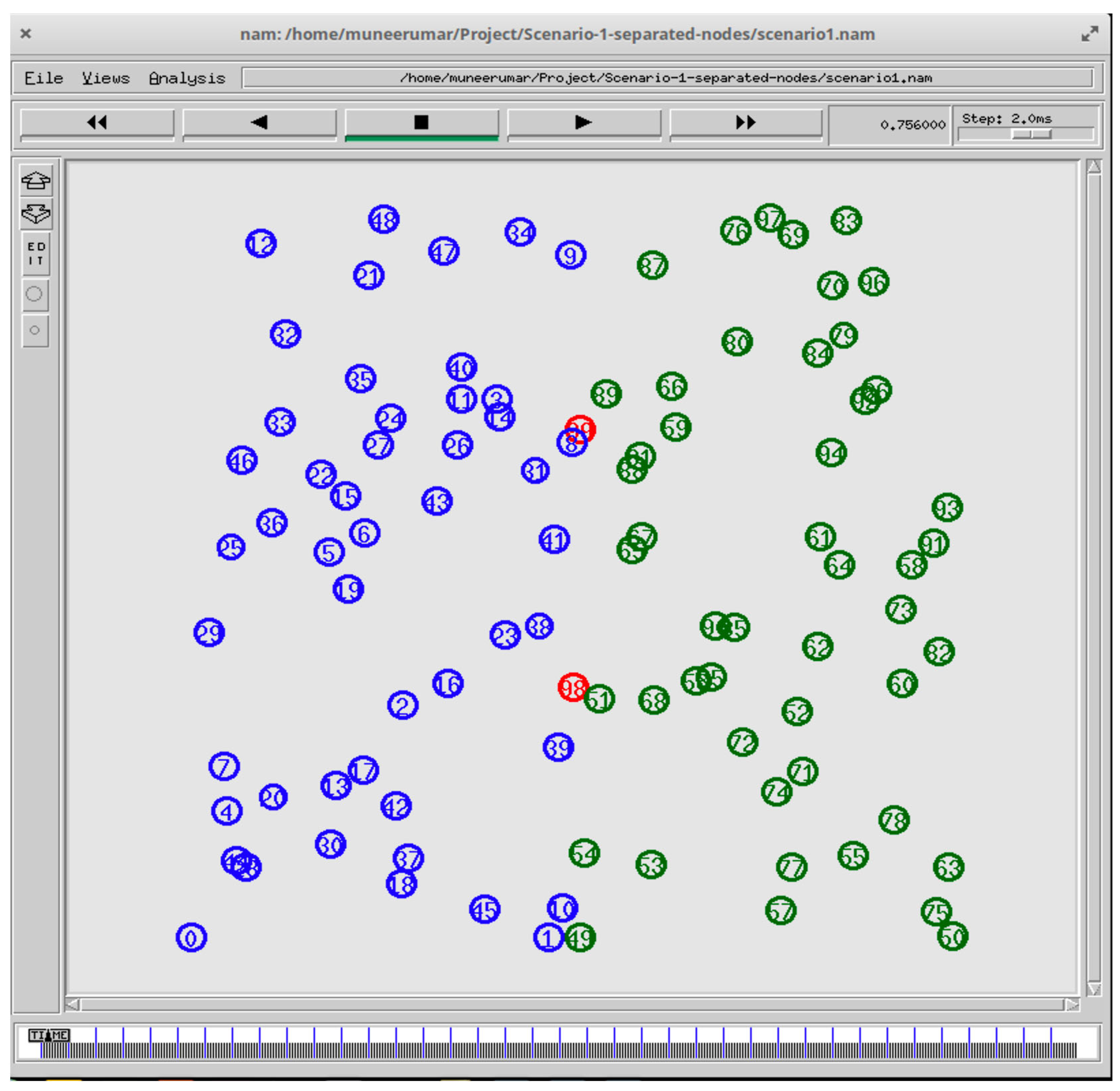
As demonstrated in
Figure 3, two separate networks can be combined to form a larger heterogeneous network. The smart nodes allow the reactive and proactive nodes to connect with each other. Two kinds of communications in such types of heterogeneous networks are possible: common and unusual. In most cases, nodes send and receive data from other nodes that are comparable to them. Heterogeneous nodes communicate with each other in the situation of unusual communication. In this case, the proposed protocol’s performance for common type of communication may be inadequate. However, the suggested protocol outperforms when acting as a gateway between two different types of nodes for an unusual type of communication.
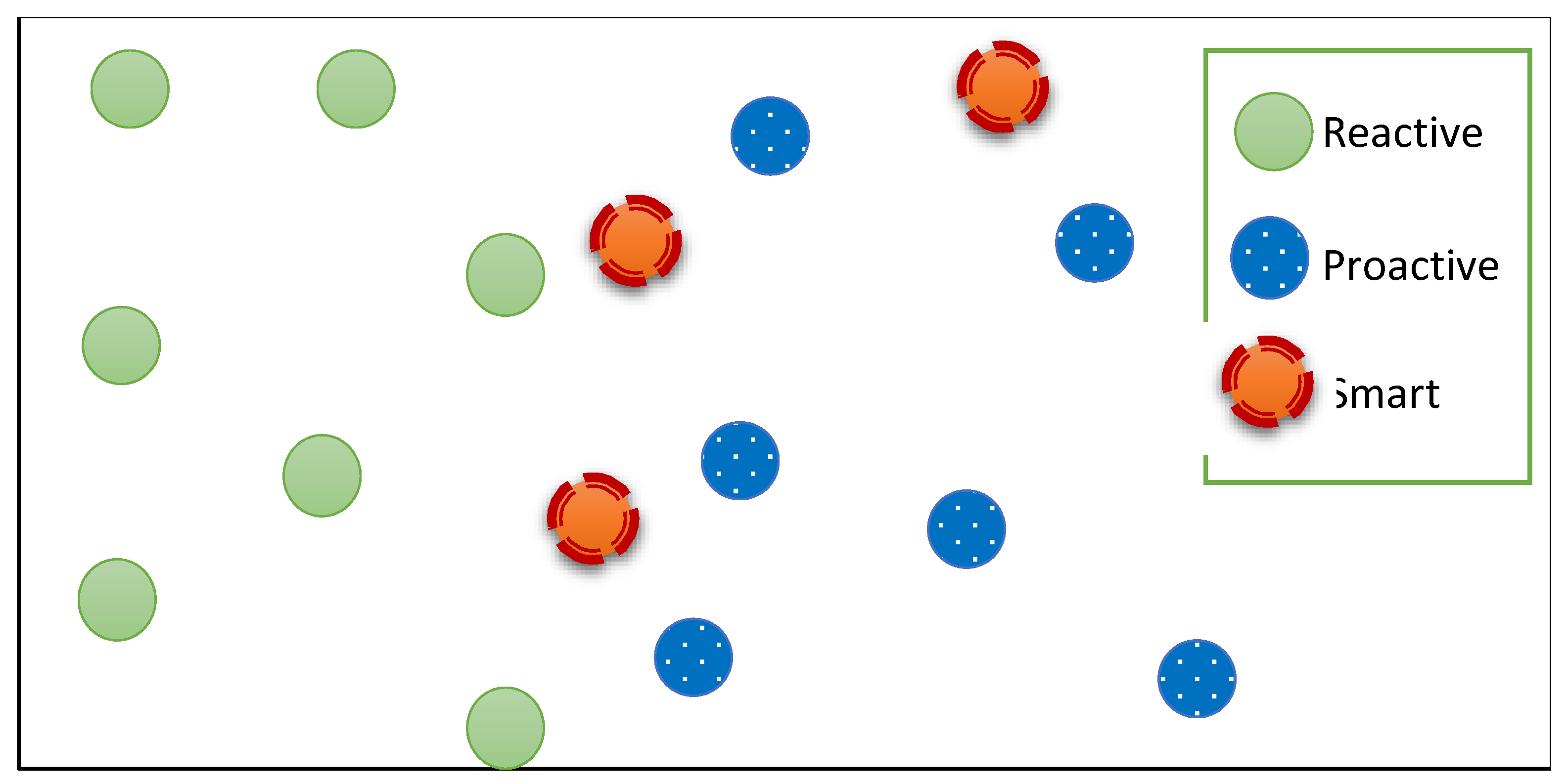
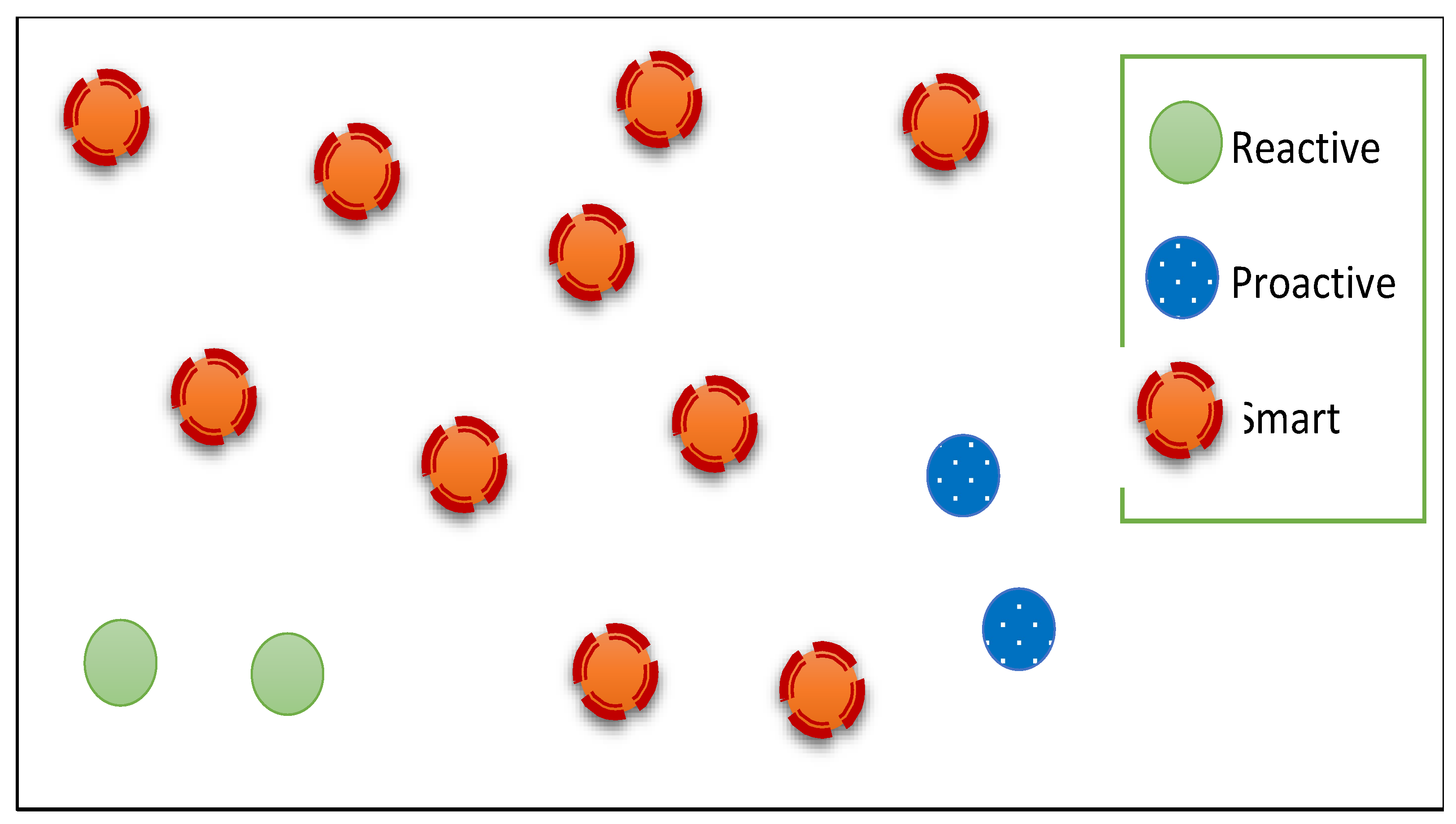
The different nodes in
Figure 4 are distributed randomly in the same area. Both reactive and proactive nodes benefit from smart nodes, which allow them to more efficiently send and receive data.
A case scenario is given in
Figure 5, in which a class of nodes is arranged in an L form. If the top-most and the right-most nodes, from this class, want to communicate, they should follow the whole route through all the nodes of their class. Using smart nodes, a new diagonal route which is significantly shorter, can be created by involving nodes of another class. The smart link refers to a path that the smart nodes are involved in.
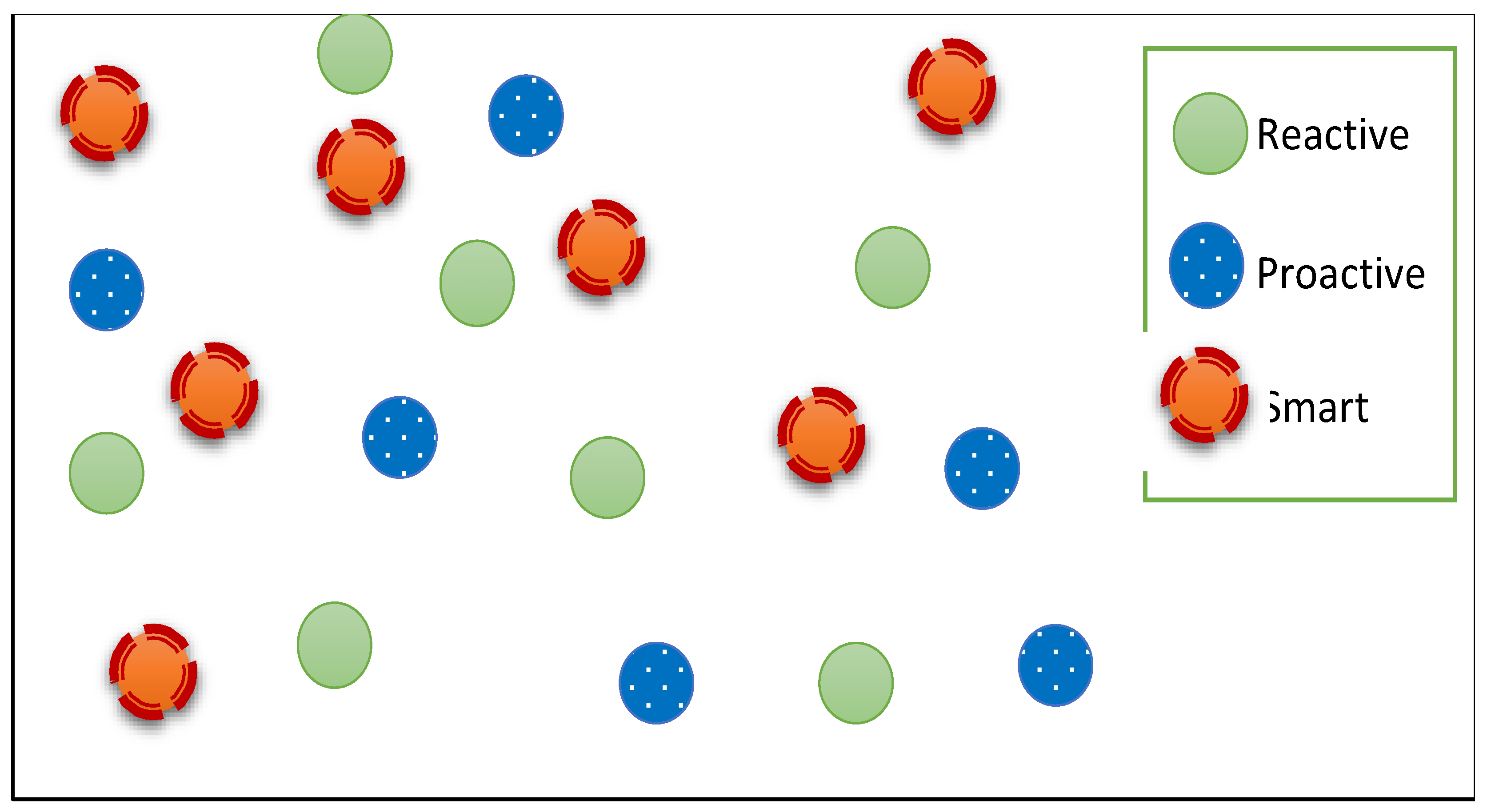
With the proposed smart nodes, a variety of options are available. As shown in
Figure 6, a network made up of practically all of the smart nodes is achievable. In such a type of network, the nodes rationally adjust their routing behavior to be proactive or reactive. The adaptation relies on the node’s parameters first, then on the preferences of all known nodes.
3.2. Assumptions and Features
The following are the essential assumptions and aspects of the proposed mechanism:
3.2.1. Network Model
The network is assumed to have a variety of nodes. The network can be compared to a game denoted by G as shown in Equation (1). Where
represents the set of all the nodes of heterogeneous connected networks,
denotes the strategies, and
and
are used for utility and improvement functions, respectively.
3.2.2. Network Layer
At the physical layer, all nodes are believed to have the same attributes. Only at the network layer do the heterogeneous nodes use distinct routing behaviors. If we suppose that there is also heterogeneity at the physical layer, then the proposed smart nodes should be able to decode the various signals sent by heterogeneous nodes. The smart nodes could use a variety of physical interfaces to understand different signals. However, this work focuses mainly on the network layer.
3.2.3. Base Protocols
The network uses two base protocols: AODV and DSDV. AODV is a reactive protocol, whereas the latter is proactive. Any of these protocols can be used by any of the network nodes. The smart nodes can understand both protocols, but only one of them is used for communication at a time. Other protocols instead of AODV and DSDV can also be used in the proposed mechanism. However, our main focus is on these two protocols during the design and implementation.
3.2.4. Classifications of Nodes
Two groups of nodes can be made based on two classes: type of nodes and protocol-based nodes. There are four types of nodes in the node-type category: (a) source, (b) destination, (c) relay, and (d) neighbor nodes. Equations (2)–(5) are used to define these four types.
The source node is denoted by
that is the node
member of network
N.
is a member of alive nodes
and active data initiating nodes
.
In Equation (3),
denotes the destination nodes that are members of sets of alive and active data receiver nodes
.
The set of neighbor nodes of node
can be represented by
.
is a neighbor node of
that is present in the routing table
of node
, and is marked as
.
In Equation (5), a relay node is the node that is present in the routing table of source node .
Different classes of routing protocols can be used for network nodes. Each node must belong to at least one class as shown in Equation (6). The entire heterogeneous network is composed of the nodes belonging to these classes.
In our case, we are using three classes:
for proactive nodes,
for reactive nodes, and
for smart nodes. In the proposed mechanism the three classes can be further defined by Equations (7)–(9).
The proactive nodes,
belonging to
, periodically generate topological control messages (TCM) also known as HELLO messages. These nodes also respond to relevant TCM.
denote the reactive nodes. These nodes belong to
. These nodes generate and receive routing packets i.e., route request (RREQ), route replies (RREP), and route errors (RERR).
Both reactive and proactive features are present in smart nodes . These nodes represent the coming together of reactive and proactive activities.
3.2.5. Neighborhood and Routing Tables
Routing tables are available in two different formats. The routing table used by
nodes is shown in
Table 3.
nodes retain routing information in their routing tables in the following format shown in
Table 4.
For the storage of routing information, a
uses both
and
routing tables. A translator is kept in such nodes to change the values between both the routing tables. Furthermore, each smart node maintains an additional table in which it stores information about its neighbors. These data are gathered after a certain amount of time has passed in order to compute the data about neighbor nodes. The table primarily comprises energy and consumption ratios, and neighbors’ mobility ratios as shown in
Table 5.
3.2.6. Nodes’ Energy Level
Each node has a finite amount of energy. Due to their heterogeneous nature, nodes’ energy levels may differ from one another. If a node has enough energy to be spent on data packet transmission, processing, and reception, it is said to be alive. The dead nodes cannot be considered as part of the network. At any point in time if a node fails due to any reason—such as breakage or battery failure—then the node can be considered a dead node.
and
are the current and initial energies of a node
, respectively. The ratio of a node’s energy consumption over time
is defined as,
. After a certain amount of time, the energy fluctuation must fulfill the equation
. The value
may differ for each node due to the heterogeneous environment.
is the remaining energy ratio of a node,
at time
, as computed in Equation (10).
In Equation (11),
represents the current energy to energy consumption ratio at time
of a node
.
The median of the known nodes’
can be used to calculate the energy threshold value,
, as shown in Equation (11). Each smart node can send a request to its known nodes to get these values.
3.2.7. Nodes’ Mobility Ratio
The network’s nodes are mobile and have variable mobility ratios. The
kth location of a node
is
where
and
are the coordinates. If a node
moves from location
k to location
l in a time period
t, then it can be denoted as
and computed as in Equation (12).
The same can be said for the
node’s mobility ratio, which is indicated by
. A smart node requires a threshold value for mobility ratio,
, during default protocol selection, which can be calculated using Equation (13).
3.3. Game Modeling
As previously stated, the network can be viewed as a game. The strategies and utility functions of player nodes as well as the game matrix and improvement functions are addressed in this subsection.
3.3.1. Nodes’ Strategies and Utility Function
S denotes the strategy of nodes towards routing protocol selection in the game. The routing behavior of a node is determined by three major characteristics. The energy level, consumption ratio, and mobility ratio of the nodes are these metrics. A proactive routing technique is preferred by nodes with a higher degree of energy while highly mobile nodes, on the other hand, require reactive routing for best results.
The nodes first examine their mobility ratio. For a higher value of mobility, the nodes adjust their default routing protocol to reactive. If the mobility level is higher, then the energy consumption ratio and current level are examined. With the reduced energy consumption ratio, nodes with a higher energy level adapt to proactive routing behaviour. A node’s power is tested afterward. For a smart node
, i.e.,
N, two strategies are defined:
, where
represents the strategy with a reactive protocol (
) and
denotes a member of the
class, i.e., proactive node. If two smart nodes with different routing protocols are communicating with each other, then an adequate level of energy and time is wasted on unwanted routing and topology control packets. This wastage can be considered the transmission cost on routing. The payoff functions are determined by node strategies. Equation (14) can be used to define the payoff function for two smart nodes.
where
is the cost of routing for the class of proactive nodes due to the smart node
. Between two smart nodes, the following game matrix can be formed:
There is no need to change the routing protocol of
and
, if both are using the same routing protocol. If two nodes have distinct routing behaviors, their routing performance will be impaired, as shown in the
Table 6. The situation where both the smart nodes operate on different protocols is referred to as the degraded protocols and denoted by Δ R and Δ P. It is clear from Lemma 1 that the game strageies form a pure Nash Equilibrium.
Lemma1. In the proposed game, the strategy pairsand) form a pure Nash Equilibrium.
Proof. There are two major classes of nodes in the network. These are reactive and proactive classes. Each smart node is allowed to choose either of these two routing protocols. In
Table 5 the strategies are given along with the payoffs. In case both the interacting nodes use the same routing protocol then there will be an optimal situation denoted by
. It is clear that the payoff should be less than 1 for the cases
and
). The distinct nodes should change their strategies to gain an optimal payoff. Therefore, according to the definition, the situation is a pure Nash Equilibrium for this game. □
To switch the routing from a costly routing protocol, an evolutionary technique, referred to as the improvement function , is used.
3.3.2. Improvement Function
Each node in the network establishes its default routing protocol at the outset and refreshes it after a certain amount of time has passed. With the passage of time, the default behavior changes based on the parameters considered. If a node in the game matrix receives Δ R or Δ P. It kicks off the game’s second phase. Both of its routing tables are scanned. The NextHop fields are checked in both tables. Using the following Equation (15), to obtain the most common routing protocol in the neighborhood, the entries are counted and compared.
If the criterion is met, the node
adjusts to proactive as its default routing protocol; otherwise, it switches to reactive protocol. If the node receives Δ R or Δ P again, it evaluates all of the stored nodes in its routing tables, and accordingly modifies its routing protocol, following the same approach as with Equations (16)–(18).
Two sets, and , are used in these equations and are known to node . The node switches its routing behavior according to the largest known routing protocol in the network.
3.4. Architecture and Functions of Smart Nodes
The design of smart nodes, their functions, and the algorithms employed in the mechanism are detailed in this subsection. Various scenarios are presented, along with smart node responses. As previously stated, smart nodes act rationally, allowing different types of communication and data packets to be received and intelligent case-based decisions to be made.
3.4.1. Diagram for Smart Nodes
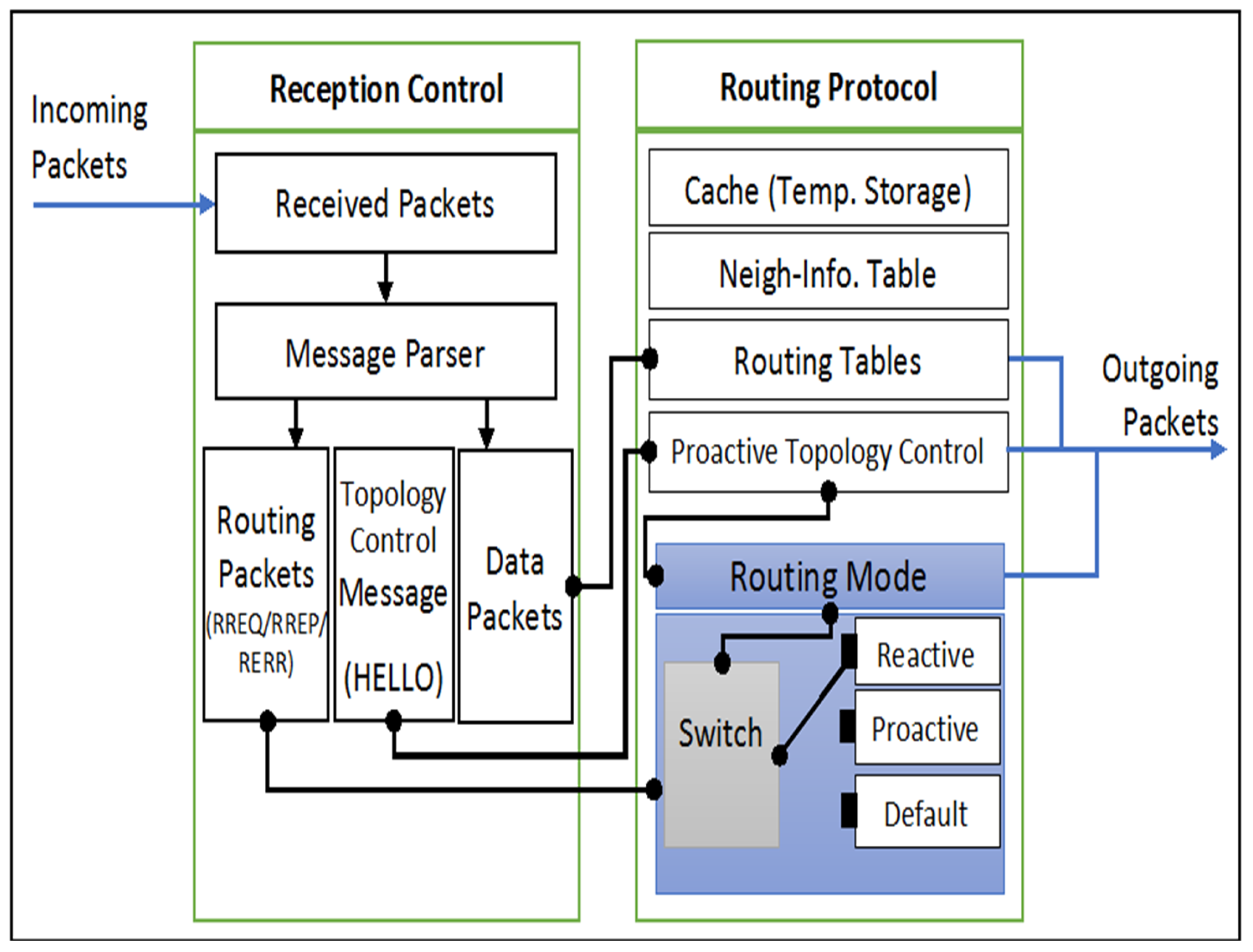
The architecture of proposed smart nodes is divided into two sections: the first is reception control, which deals with packet recognition and the latter is routing protocol selection. The packet analysis is the subject of the first module. The received packets are classified as (a) data, (b) routing, and (c) TCM packets using a message parser. A different set of instructions is followed for each type of packet. The routing protocol module receives the set of instructions. The routing tables are kept in the routing protocol module. This module additionally adjusts the routing mode based on the previous module’s instructions. This module also keeps track of the neighbors’ information as well as a temporary storage cache. This architecture is presented in
Figure 7 and is further explained in
Table 7.
3.4.2. Algorithms
This section goes through three major algorithms. Algorithm 1 describes the technique for smart nodes to choose an initial default routing protocol. The selected routing protocol may update with the passage of time, according to the GT process. Algorithm 2 describes how to update the routing protocol. Smart nodes accept packets and conduct different tasks depending on the nature of packets received. Algorithm 3 explains this procedure.
| Algorithm 1: Selection of Default Routing Protocol |
Input:
Output: DefaultRoutingProtocol
Begin:
|
The neighbors’ table is taken first, according to Algorithm 1. By obtaining new information from its known nodes, the smart node updates the entries. The threshold values for energy to consumption ratios and mobility ratios are calculated in stages 4 and 5. The routing mode is determined from step 7 by comparing the node’s data to the estimated threshold values. If the node’s
is larger than or if its remaining energy ratio is greater than
in step 9, the
represents a coefficient value obtained during simulations.
| Algorithm 2: Evolution Process for Default Routing Protocol |
Input:
Output: DefaultRoutingProtocol
Begin:
If
|
In Algorithm 2, the round variable is utilized to change the evolutionary rounds for parameter consideration. This round gets reset to its original value when a certain amount of time has passed. The time is verified for expiry in step one. If the round has expired, step 2 sets the first round. In step 4, the game matrix is examined for the chances of a degraded routing protocol. If there is a degraded protocol, steps 6 to 12 are carried out for the case of first round, and steps 15 to 23 are carried out for the cases of the next rounds. At first, the node examines the neighbors’ parameters, but in subsequent cases, the node considers all the known nodes in its routing tables.
| Algorithm 3: Operational Tasks of Smart Nodes |
Input: Packet
Output:
Begin:
|
Algorithm 3 deals with packet arrival and node’s operations regarding the kind of packet. Initially, a temporary variable RT is allocated to one of the routing tables. Step 9 determines whether the packet is of routing type. For a route packet arrival, actions are conducted from steps 10 to 18. The node either acknowledges the source, or broadcasts or forwards the packet during these steps. Step 20 determines whether or not the packet is a proactive TCM. The routing table is modified after the TC message is acknowledged. At step 25, the packet is checked to see if it contains data. Respective operations (steps 26–31) are performed according to the nature of the data packet.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}