

Evaluation Index for IVIS Integration Test under a Closed Condition Based on the Analytic Hierarchy Process

Abstract
:1. Introduction
2. Literature Review
3. Methods
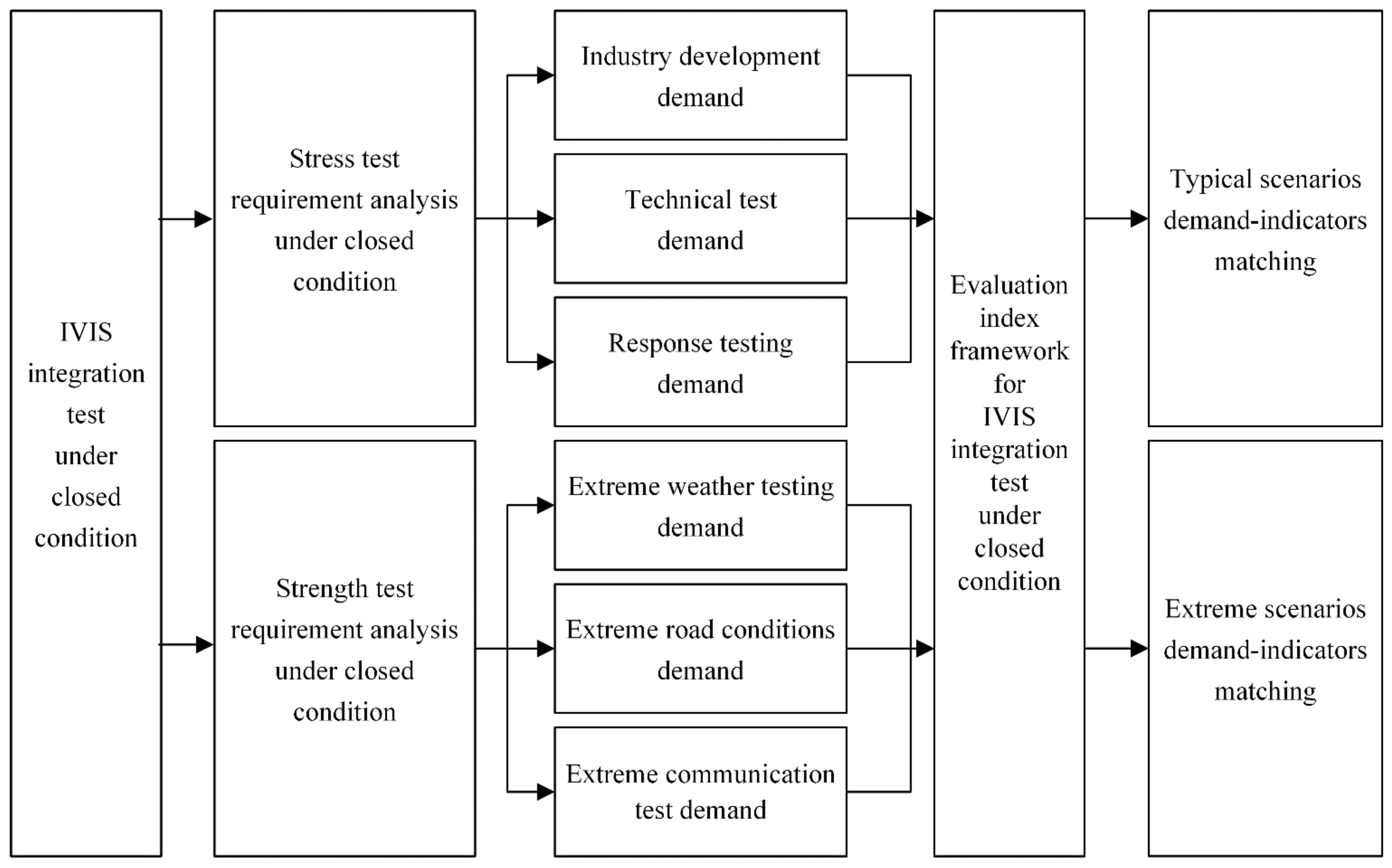
3.1. Demand–Indicator Matching for Scenarios
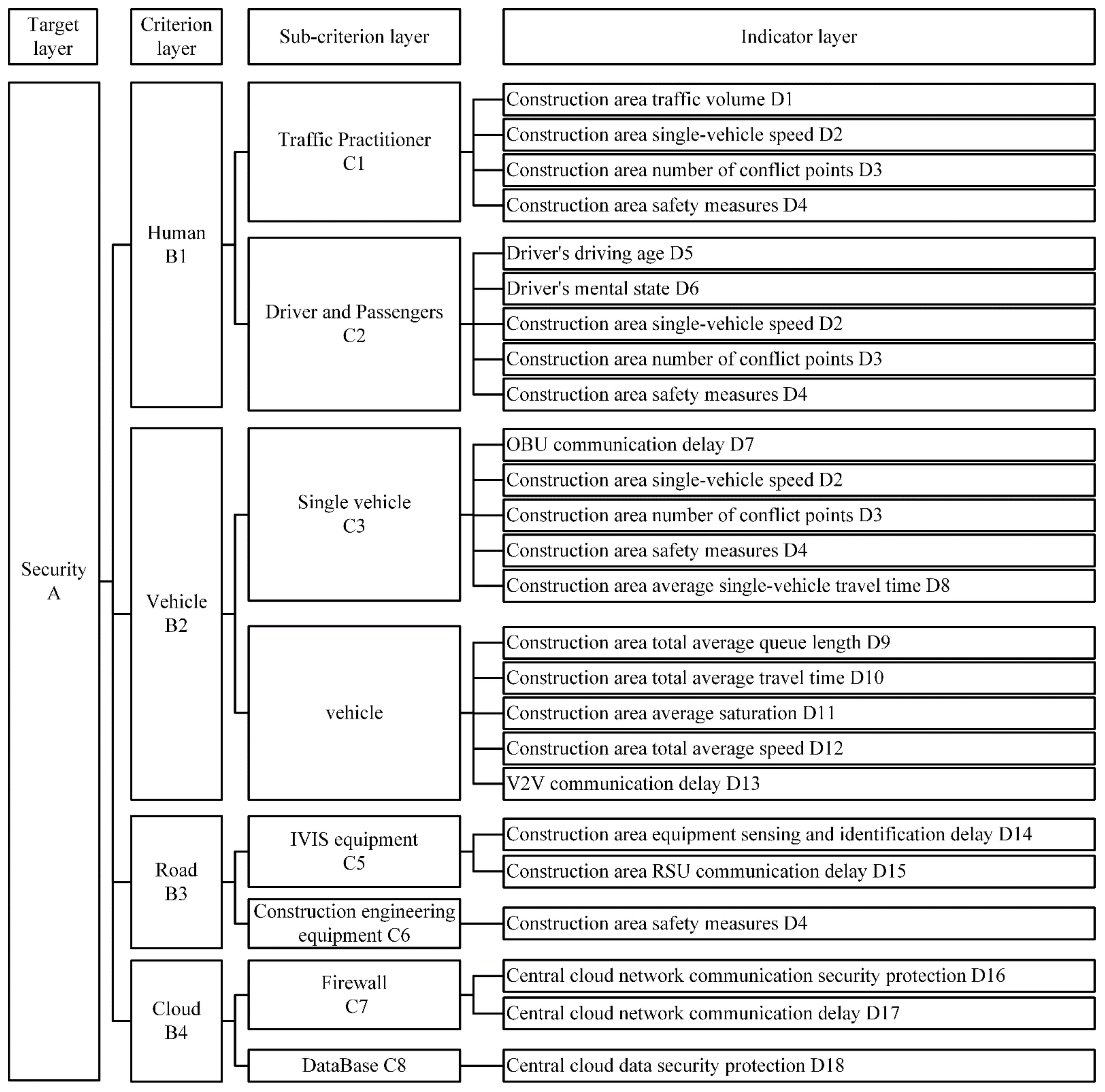
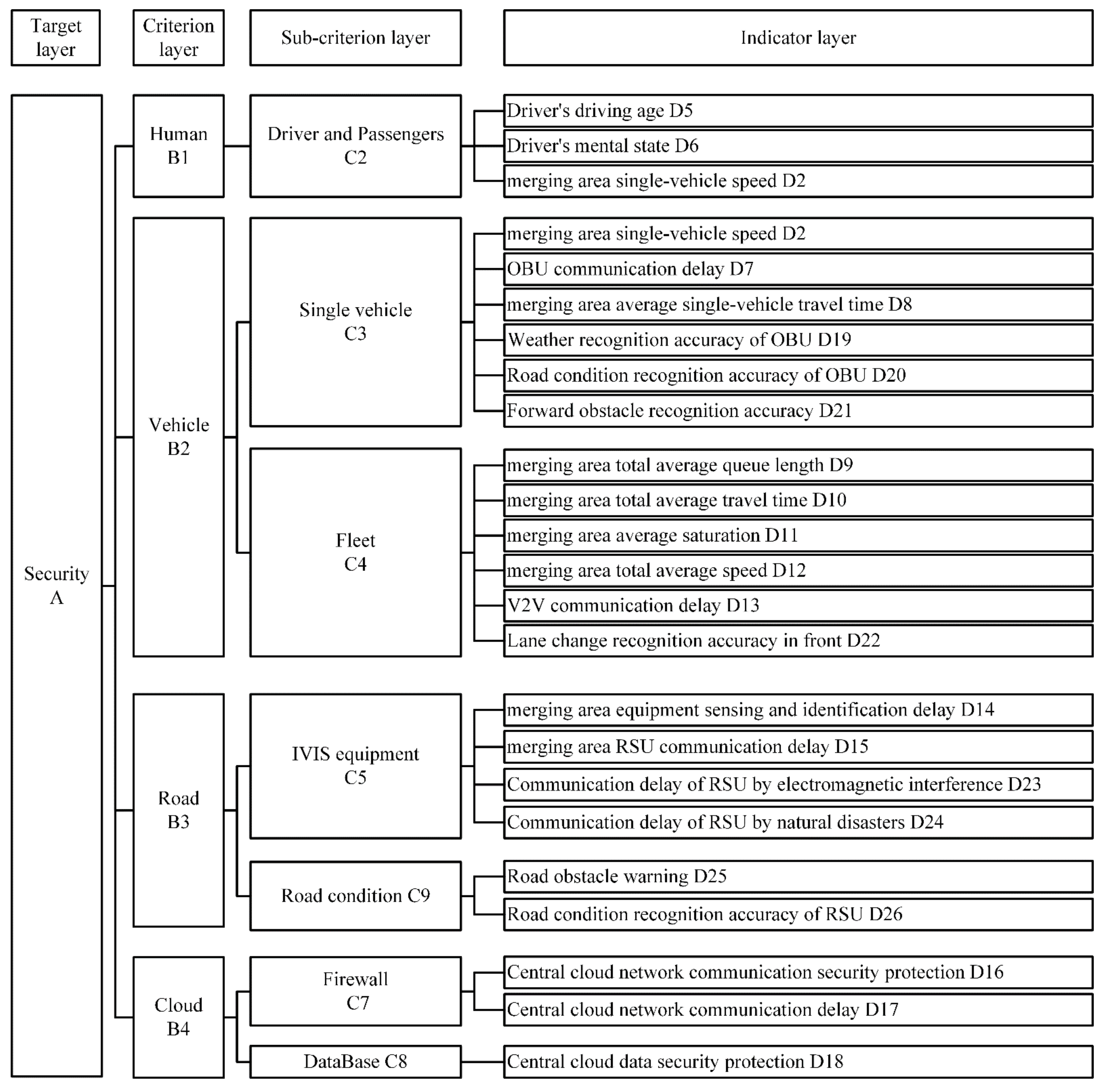
- Step 1: Upper layer framework construction
- 2.
- Step 2: Lower layer indicator extraction
- 3.
- Step 3: Demand–indicator matching based on scenario selection
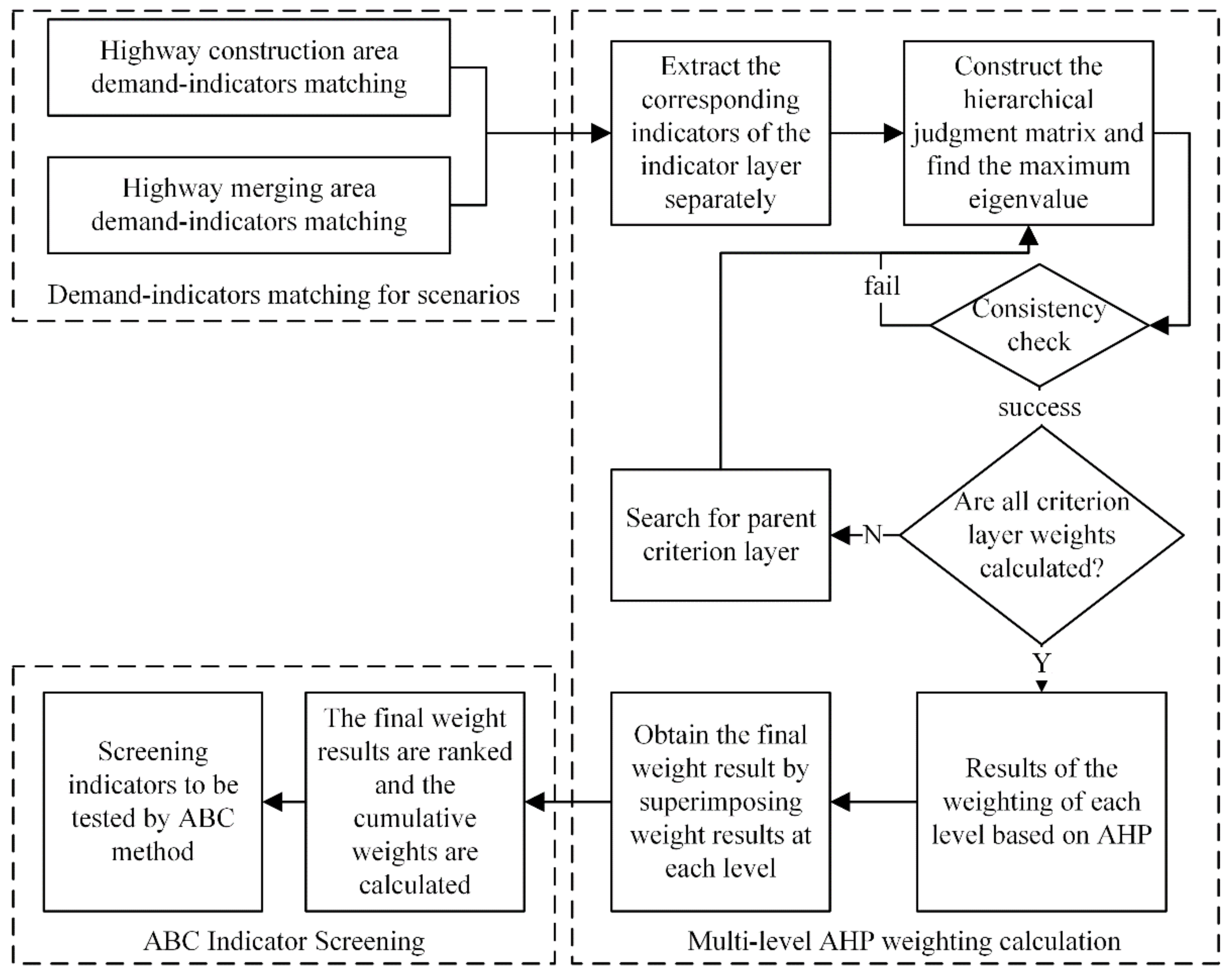
3.2. Weight Calculation Based on the AHP Method
3.3. Index Screening Based on the ABC Method
4. Example Analysis of Scenarios
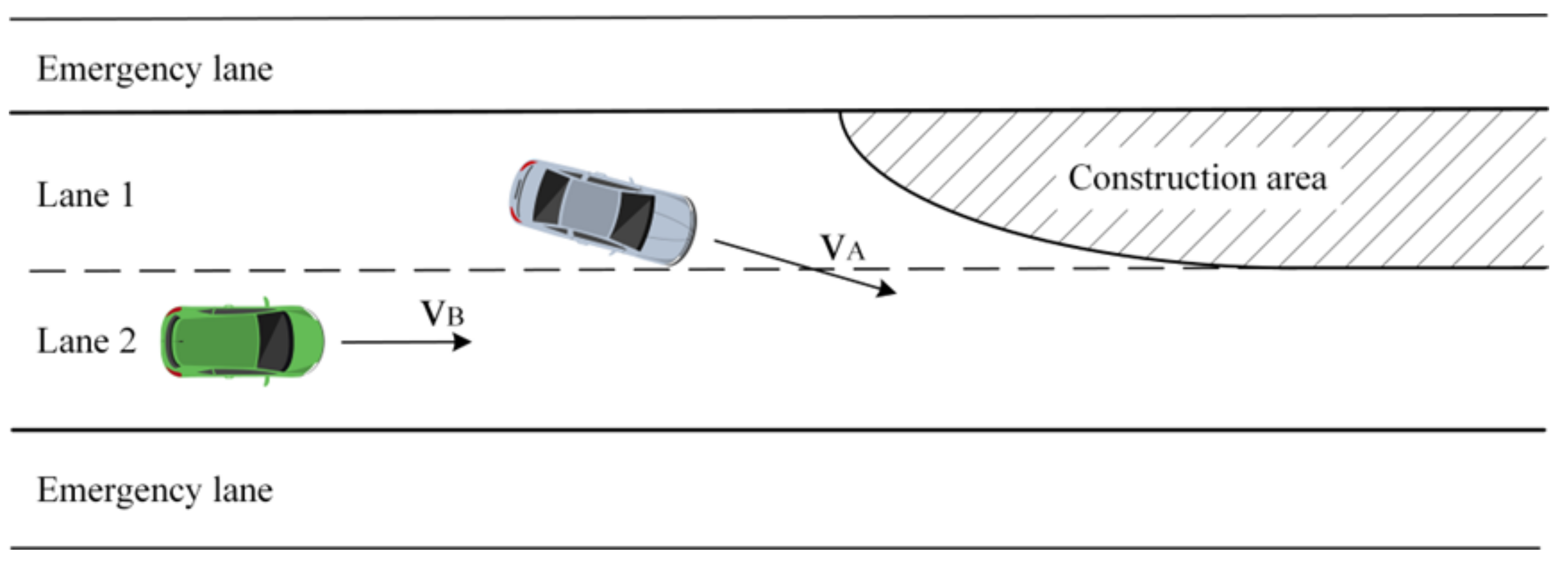
4.1. The Stress Test of the Highway Construction Area
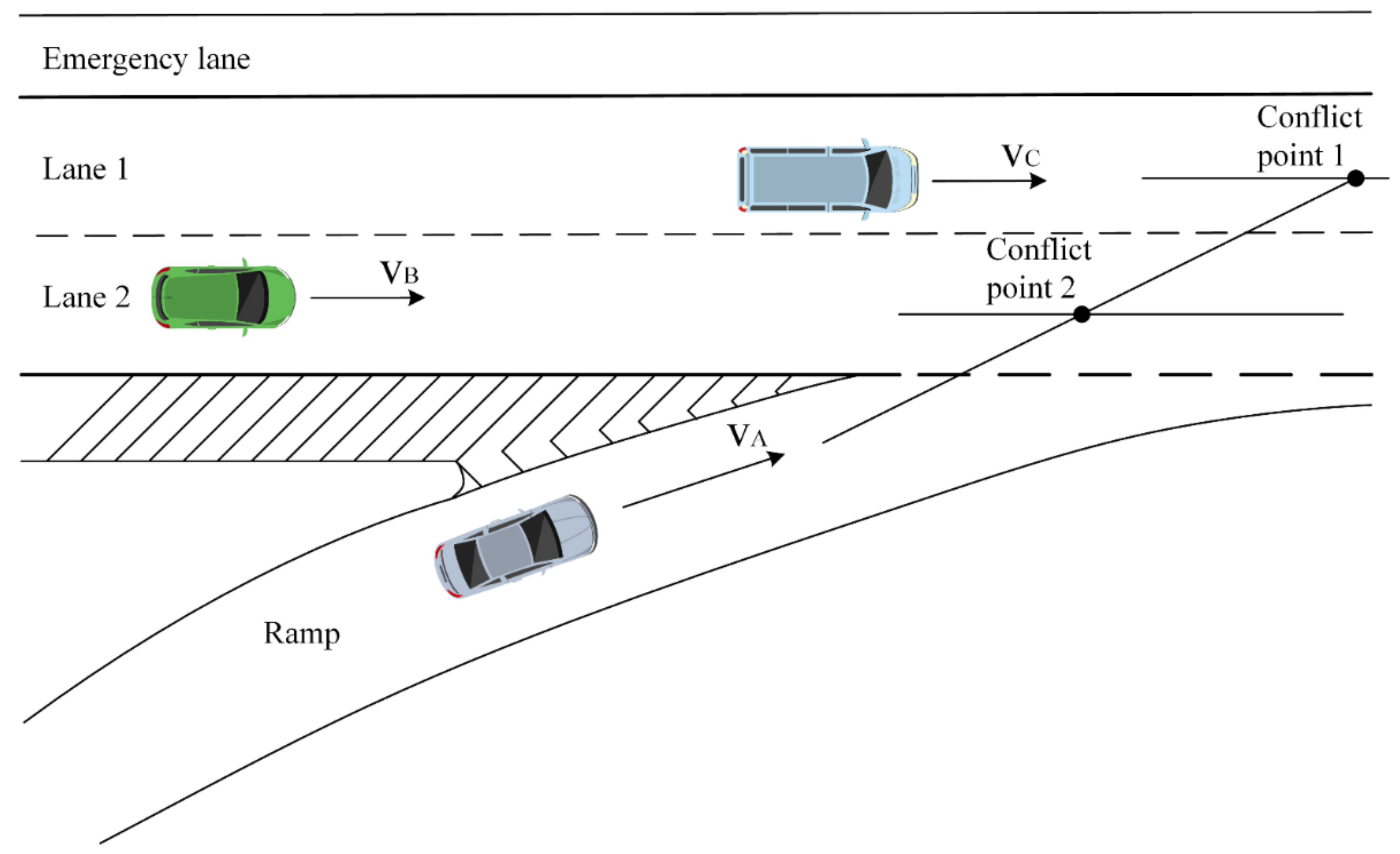
4.2. The Strength Test of the Highway Merging Area
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, R.; Zhang, X.; Xu, Z.; Zhao, X.; Li, X. Research on Performance and Function Testing of V2X in a Closed Test Field. J. Adv. Transp. 2021, 2021, 1–18. [Google Scholar] [CrossRef]
- Quiroga, C.A. Performance Measures and Data Requirements for Congestion Management Systems. Transp. Res. Part C Emerg. Technol. 2000, 8, 287–306. [Google Scholar] [CrossRef]
- Rao, A.M.; Velmurugan, S.; Lakshmi, K.M.V.N. Evaluation of Influence of Roadside Frictions on the Capacity of Roads in Delhi, India. Transp. Res. Procedia 2017, 25, 4771–4782. [Google Scholar] [CrossRef]
- Gressai, M.; Varga, B.; Tettamanti, T.; Varga, I. Investigating the Impacts of Urban Speed Limit Reduction through Microscopic Traffic Simulation. Commun. Transp. Res. 2021, 1, 100018. [Google Scholar] [CrossRef]
- Wang, S.; Chen, C.; Zhang, J.; Gu, X.; Huang, X. Vulnerability Assessment of Urban Road Traffic Systems Based on Traffic Flow. Int. J. Crit. Infrastruct. Prot. 2022, 38, 100536. [Google Scholar] [CrossRef]
- Zhang, S.T.; Chu, L.; Yao, L.; Yang, Y.; Zhang, H. The Design of Regenerative Braking System with a Pedal Emulator. Adv. Mater. Res. 2013, 694, 1602–1607. [Google Scholar] [CrossRef]
- Meng, D.; Zhang, L.; Yu, Z. A Dynamic Model for Brake Pedal Feel Analysis in Passenger Cars. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 230, 955–968. [Google Scholar] [CrossRef]
- Blau, J. Creative Destruction [Car Crash Testing]. IEEE Spectr. 2002, 39, 55–56. [Google Scholar] [CrossRef]
- Wang, R.; Zhao, X.; Xu, Z.; Yang, Y. CAVTest: A Closed Connected and Automated Vehicles Test Field of Chang’an University in China. SAE Int. J. Connect. Autom. Veh. 2021, 4, 423–435. [Google Scholar] [CrossRef]
- Roudbari, A.; Nateghi, A.; Yousefi-Khanghah, B.; Asgharpour-Alamdari, H.; Zare, H. Resilience-Oriented Operation of Smart Grids by Rescheduling of Energy Resources and Electric Vehicles Management during Extreme Weather Condition. Sustain. Energy Grids Netw. 2021, 28, 100547. [Google Scholar] [CrossRef]
- Li, K.; Luo, S.; Fan, L.; Hu, S.; Zhou, X.; Tu, R.; Zhang, H.; Jin, X.; Zhao, X.; Su, L. Investigation on the Performance and Characteristics of a Heat Pump System for Electric Vehicles under Extreme Temperature Conditions. Case Stud. Therm. Eng. 2021, 27, 101308. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, G.; Wang, D. A Security Risk Assessment Method Based on Improved FTA-IAHP for Train Position System. Electronics 2022, 11, 2863. [Google Scholar] [CrossRef]
- Newman-Askins, R.; Ferreira, L.; Bunker, J. Intelligent Transport Systems Evaluation: From Theory to Practice. In Proceedings of the 21st ARRB and 11th REAAA Conference, Cairns, Australia, 18–23 May 2003; p. 21. [Google Scholar]
- Oliveira, E.; Portugal, L.; Junior, W. Determining Critical Links in a Road Network: Vulnerability and Congestion Indicators. Procedia Soc. Behav. Sci. 2014, 162, 158–167. [Google Scholar] [CrossRef] [Green Version]
- He, F.; Liu, Y.; Ma, L. A Traffic Congestion Assessment Method for Urban Road Networks Based on Speed Performance Index. Procedia Eng. 2016, 137, 425–433. [Google Scholar] [CrossRef] [Green Version]
- Jackson, S.S. Safety Aware Platooning of Automated Electric Transport Vehicles. Master’s Thesis, Utah State University, Logan, UT, USA, 2013; p. 1746. [Google Scholar] [CrossRef]
- Zhou, W.; Zhu, Y.; Zhao, X.; Xu, Z.; Wang, R. Data-Driven Vehicle Cut-In Test Cases Generation for Testing of Autonomous Driving on Highway. In Proceedings of the CICTP 2020 Conference, Xi’an, China, 17–20 December 2021; American Society of Civil Engineers: Reston, VA, USA, 2020; pp. 892–904. [Google Scholar]
- Genders, W.; Razavi, S.N. Impact of Connected Vehicle on Work Zone Network Safety through Dynamic Route Guidance. J. Comput. Civ. Eng. 2016, 30, 4015020. [Google Scholar] [CrossRef]
- Kolosz, B.; Grant-Muller, S. Appraisal and Evaluation of Interurban ITS: A European Survey. IEEE Trans. Intell. Transp. Syst. 2014, 16, 1070–1087. [Google Scholar] [CrossRef]
- Yu, H.; Lin, Y.; Ren, Y.; Chao, W. Comprehensive Evaluation Method of IVIS Based on Multi-Objective Decision. In Proceedings of the CICTP 2020, Xi’an, China, 17–20 December 2021; pp. 1290–1302. [Google Scholar]
- Hsieh, M.-C.; Chen, L.-X.; Lee, Y.-C.; Liu, Q.-M. A Simulation-Based Study of the Effect of Brake Light Flashing Frequency on Driver Brake Behavior from the Perspective of Response Time. Behav. Sci. 2022, 12, 332. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, B.; Xu, Z.; Gong, S.; Gao, Y.; Cui, Z.; Chen, X. A Local Traffic Characteristic Based Dynamic Gains Tuning Algorithm for Cooperative Adaptive Cruise Control Considering Wireless Communication Delay. Transp. Res. Part C Emerg. Technol. 2022, 142, 103766. [Google Scholar] [CrossRef]
- Hu, M.; Zhao, X.; Hui, F.; Tian, B.; Xu, Z.; Zhang, X. Modeling and Analysis on Minimum Safe Distance for Platooning Vehicles Based on Field Test of Communication Delay. J. Adv. Transp. 2021, 2021, 5543114. [Google Scholar] [CrossRef]
- Javed, M.A.; Ben Hamida, E.; Znaidi, W. Security in Intelligent Transport Systems for Smart Cities: From Theory to Practice. Sensors 2016, 16, 879. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.; Wen, D.; Geng, J.; Zheng, N.-N. Task-Specific Performance Evaluation of UGVs: Case Studies at the IVFC. Intell. Transp. Syst. IEEE Trans. 2014, 15, 1969–1979. [Google Scholar] [CrossRef]
- Cartenì, A.; Regna, M.; Henke, I.; Di Bartolomeo, M.I. A Cost-Benefit Analysis of a Fully-Automated Driverless Metro Line in a High-Density Metropolitan Area in Italy. In Proceedings of the International Conference on Environment and Electrical Engineering IEEE (EEEIC and I & CPS Europe), Genova, Italy, 19 June 2019. [Google Scholar] [CrossRef]
- Leviäkangas, P.; Lähesmaa, J. Profitability Evaluation of Intelligent Transport System Investments. J. Transp. Eng.-Asce 2002, 128, 276–286. [Google Scholar] [CrossRef]
- Li, H.; Ni, F.; Dong, Q.; Zhu, Y. Application of Analytic Hierarchy Process in Network Level Pavement Maintenance Decision-Making. Int. J. Pavement Res. Technol. 2018, 11, 345–354. [Google Scholar] [CrossRef]
- Deng, F.; Wang, C.; Liang, X. Fuzzy Comprehensive Evaluation Model for Flight Safety Evaluation Research Based on an Empowerment Combination. In Proceedings of the 10th International Conference on Management Science and Engineering Management, Kanazawa, Japan, 28–31 July 2017; pp. 1479–1491. [Google Scholar] [CrossRef]
- Cartenì, A.; Henke, I.; Mallozzi, F.; Molitierno, C. A Multi-Criteria Analysis as A Rational Evaluation Process for Building a New Highway in Italy. WIT Trans. Ecol. Environ. 2022, 217, 713–723. [Google Scholar] [CrossRef] [Green Version]
- Turoń, K.; Kubik, A.; Chen, F. What Car for Car-Sharing? Conventional, Electric, Hybrid or Hydrogen Fleet? Analysis of the Vehicle Selection Criteria for Car-Sharing Systems. Energies 2022, 15, 4344. [Google Scholar] [CrossRef]
- Turoń, K. Selection of Car Models with a Classic and Alternative Drive to the Car-Sharing Services from the System’s Rare Users Perspective. Energies 2022, 15, 6876. [Google Scholar] [CrossRef]
- Awasthi, A.; Chauhan, S.S. Using AHP and Dempster–Shafer Theory for Evaluating Sustainable Transport Solutions. Environ. Model. Softw. 2011, 26, 787–796. [Google Scholar] [CrossRef]
- Yang, Y.H.; Chen, Y.; Tang, Z.D. Analysis of the Safety Factors of Municipal Road Undercrossing Existing Bridge Based on Fuzzy Analytic Hierarchy Process Methods. Transp. Res. Rec. 2021, 2675, 915–928. [Google Scholar] [CrossRef]
- Lu, X.; Lu, J.; Yang, X.; Chen, X. Assessment of Urban Mobility via a Pressure-State-Response (PSR) Model with the IVIF-AHP and FCE Methods: A Case Study of Beijing, China. Sustainability 2022, 14, 3112. [Google Scholar] [CrossRef]
- Anthopoulos, L.; Kolovou, P. A Multi-Criteria Decision Process for EV Charging Stations’ Deployment: Findings from Greece. Energies 2021, 14, 5441. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, J.; Li, C.; Liu, K. Competitiveness Evaluation of Electric Bus Charging Services Based on Analytic Hierarchy Process. World Electr. Veh. J. 2022, 13, 81. [Google Scholar] [CrossRef]
- Mo, S.C.; Wang, Y.H.; Xiong, F. Identification and Prioritization of Key Health Hazards to Workers in Roadway Construction. Transp. Saf. Environ. 2022, 4, 9. [Google Scholar] [CrossRef]
- Kukreti, A.; Singh, R.; Bansal, R. Happy Voyage: Application of Total Quality Management-TQM in Indian Tourism Industry with Specific Reference to Uttarakhand. Int. J. Adv. Manag. Econ. 2020, 9, 2278–3369. [Google Scholar] [CrossRef]
- Antony, J.; McDermott, O.; Sony, M. Revisiting Ishikawa’s Original Seven Basic Tools of Quality Control: A Global Study and Some New Insights. IEEE Trans. Eng. Manag. 2021, 68, 1–16. [Google Scholar] [CrossRef]
- Ali, K.; Johl, S.K. Critical Success Factors of Total Quality Management Practices Using Pareto Analysis. Int. J. Product. Qual. Manag. 2022, 36, 353–381. [Google Scholar] [CrossRef]
- Fotopoulos, C.; Kafetzopoulos, D.; Gotzamani, K. Critical Factors for Effective Implementation of the HACCP System: A Pareto Analysis. Br. Food J. 2011, 113, 578–597. [Google Scholar] [CrossRef]
- Ransikarbum, K.; Pitakaso, R.; Kim, N. A decision-support model for additive manufacturing scheduling using an integrative analytic hierarchy process and multi-objective optimization. Appl. Sci. 2020, 10, 5159. [Google Scholar] [CrossRef]
- Ransikarbum, K.; Pitakaso, R.; Kim, N.; Ma, J. Multicriteria decision analysis framework for part orientation analysis in additive manufacturing. J. Comput. Des. Eng. 2021, 8, 1141–1157. [Google Scholar] [CrossRef]
- Hu, M.; Gao, Y.; Zhao, X.; Tian, B.; Xu, Z. Constraint-Following Approach for Platoon Control Strategy of Connected Autonomous Vehicles. J. Adv. Transp. 2022, 2022, 8623410. [Google Scholar] [CrossRef]
- Morris, A.P.; Haworth, N.; Filtness, A.; Nguatem, D.-P.A.; Brown, L.; Rakotonirainy, A.; Glaser, S. Autonomous Vehicles and Vulnerable Road-Users—Important Considerations and Requirements Based on Crash Data from Two Countries. Behav. Sci. 2021, 11, 101. [Google Scholar] [CrossRef]
- Min, H.; Fang, Y.; Wang, R.; Li, X.; Xu, Z.; Zhao, X. A Novel On-Ramp Merging Strategy for Connected and Automated Vehicles Based on Game Theory. J. Adv. Transp. 2020, 2020, 2529856. [Google Scholar] [CrossRef]
- Karuppusami, G.; Gandhinathan, R. Pareto Analysis of Critical Success Factors of Total Quality Management: A Literature Review and Analysis. TQM Mag. 2006, 18, 372–385. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Current IVIS Evaluation Studies | ||
|---|---|---|
| Traffic Operation | CAVs Working Conditions | |
| Efficiency Evaluations | Safety Evaluations | Vehicle Components or Functions |
| Travel time [1] | Speed [16] | brake pedal evaluation [6,7] |
| Driver behavior and market penetration [13] | TTC [17,18] | crash testing [8,21] |
| Vulnerability [14] | economic and environmental efficiency evaluations [19,20] | communication delay [22,23] |
| Speed [15] | communication safety [24] | |
| the overall CAV performance [25] | ||
| Level of Importance | Definition (Element i with Respect to Element j) |
|---|---|
| 1 | Equally important |
| 3 | Slightly more important |
| 5 | Significantly more important |
| 7 | Strongly more important |
| 9 | Extremely more important |
| Countdown | Inverse value of element i over element j |
| Criteria Layer | Subcriteria Layer | Indicator Layer | D1 | D2 | D3 | D4 | D5 | D6 | Indicator Weight on the Subcriteria Layer | Subcriteria Weight on the Criterion Layer | Criteria Weight on the Target Layer |
|---|---|---|---|---|---|---|---|---|---|---|---|
| B1 | C1 | D1 | 1 | 1 | 1/3 | 1/5 | 0.102 | 0.5 | 0.406 | ||
| D2 | 1 | 1 | 1/3 | 1/3 | 0.116 | ||||||
| D3 | 3 | 3 | 1 | 1/3 | 0.264 | ||||||
| D4 | 5 | 3 | 3 | 1 | 0.519 | ||||||
| C2 | D2 | 1 | 1/3 | 1/3 | 3 | 1/3 | 0.056 | 0.5 | |||
| D3 | 3 | 1 | 1/3 | 5 | 1 | 0.286 | |||||
| D4 | 3 | 3 | 1 | 3 | 1 | 0.107 | |||||
| D5 | 1/3 | 1/5 | 1/3 | 1 | 1/5 | 0.229 | |||||
| D6 | 3 | 1 | 1 | 5 | 1 | 0.321 |
| Indicators | Subcriteria Weight on the Criterion Layer | The Indicator Total Weight on the Criterion Layer | |
|---|---|---|---|
| C1 | C2 | ||
| 0.500 | 0.500 | ||
| Construction area traffic volume D1 | 0.102 | 0.051 | |
| Construction area single-vehicle speed D2 | 0.116 | 0.107 | 0.111 |
| Construction area number of conflict points D3 | 0.264 | 0.229 | 0.247 |
| Construction area safety measures D4 | 0.519 | 0.321 | 0.420 |
| Driver’s driving age D5 | 0.056 | 0.028 | |
| Driver’s mental state D6 | 0.286 | 0.143 | |
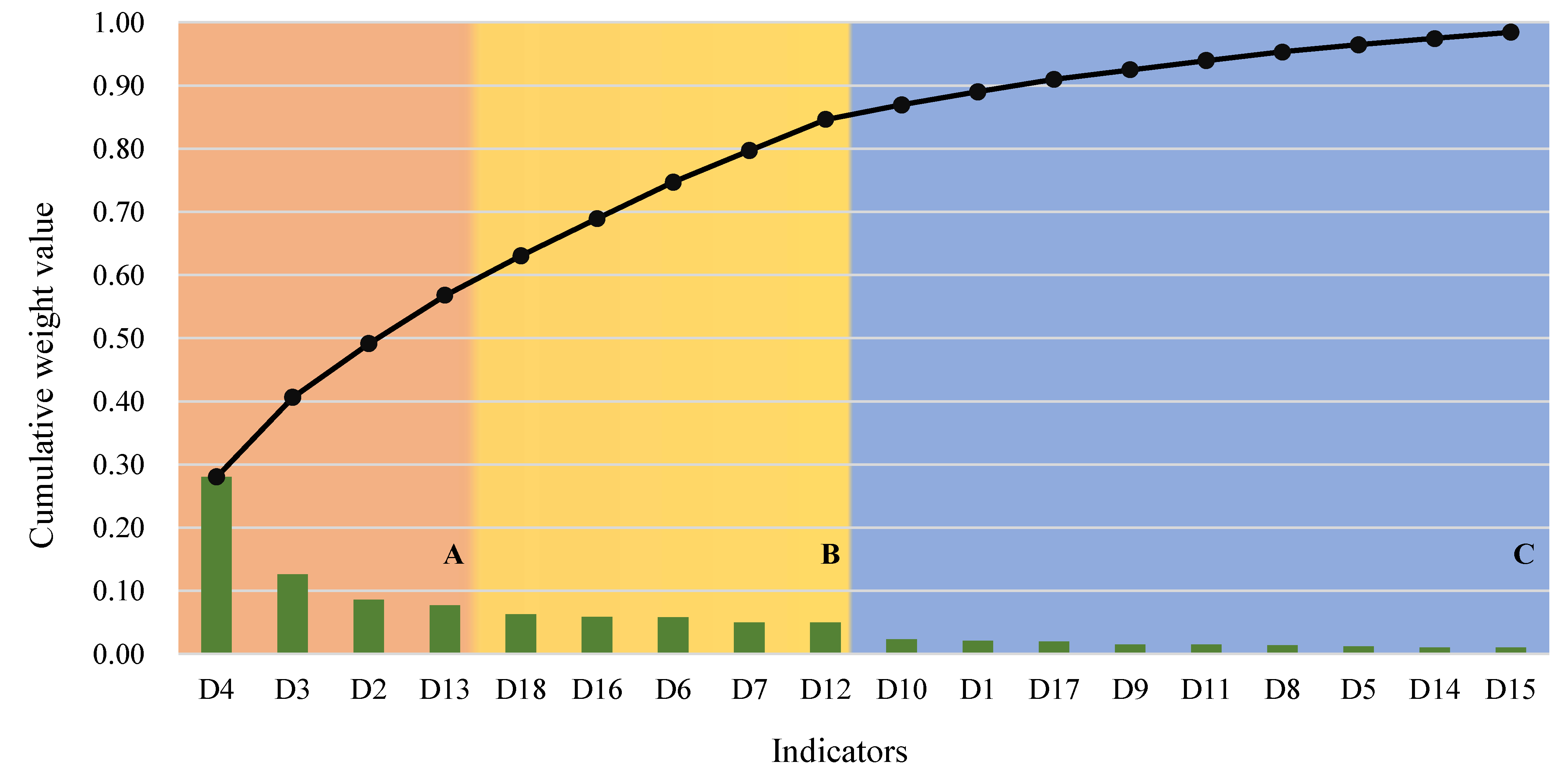
| Indicators | B1 | B2 | B3 | B4 | Total Weight of Indicators | Sort |
|---|---|---|---|---|---|---|
| 0.406 | 0.357 | 0.080 | 0.157 | |||
| Construction area traffic volume D1 | 0.051 | 0.021 | 11 | |||
| Construction area single-vehicle speed D2 | 0.111 | 0.112 | 0.085 | 3 | ||
| Construction area number of conflict points D3 | 0.247 | 0.072 | 0.126 | 2 | ||
| Construction area safety measures D4 | 0.420 | 0.139 | 0.750 | 0.280 | 1 | |
| Driver’s driving age D5 | 0.028 | 0.011 | 16 | |||
| Driver’s mental state D6 | 0.143 | 0.058 | 7 | |||
| OBU communication time delay D7 | 0.139 | 0.050 | 8 | |||
| Construction area average single-vehicle travel time D8 | 0.037 | 0.013 | 15 | |||
| Construction area total average queue length D9 | 0.042 | 0.015 | 13 | |||
| Construction area total average travel time D10 | 0.064 | 0.023 | 10 | |||
| Construction area average saturation D11 | 0.042 | 0.015 | 14 | |||
| Construction area total average speed D12 | 0.138 | 0.049 | 9 | |||
| V2V communication delay D13 | 0.214 | 0.076 | 4 | |||
| Construction area equipment sensing and identification delay D14 | 0.125 | 0.010 | 17 | |||
| Construction area RSU communication delay D15 | 0.125 | 0.010 | 18 | |||
| Central cloud network communication security protection D16 | 0.375 | 0.059 | 6 | |||
| Central cloud network communication delay D17 | 0.125 | 0.020 | 12 | |||
| Central cloud data security protection D18 | 0.500 | 0.063 | 5 |
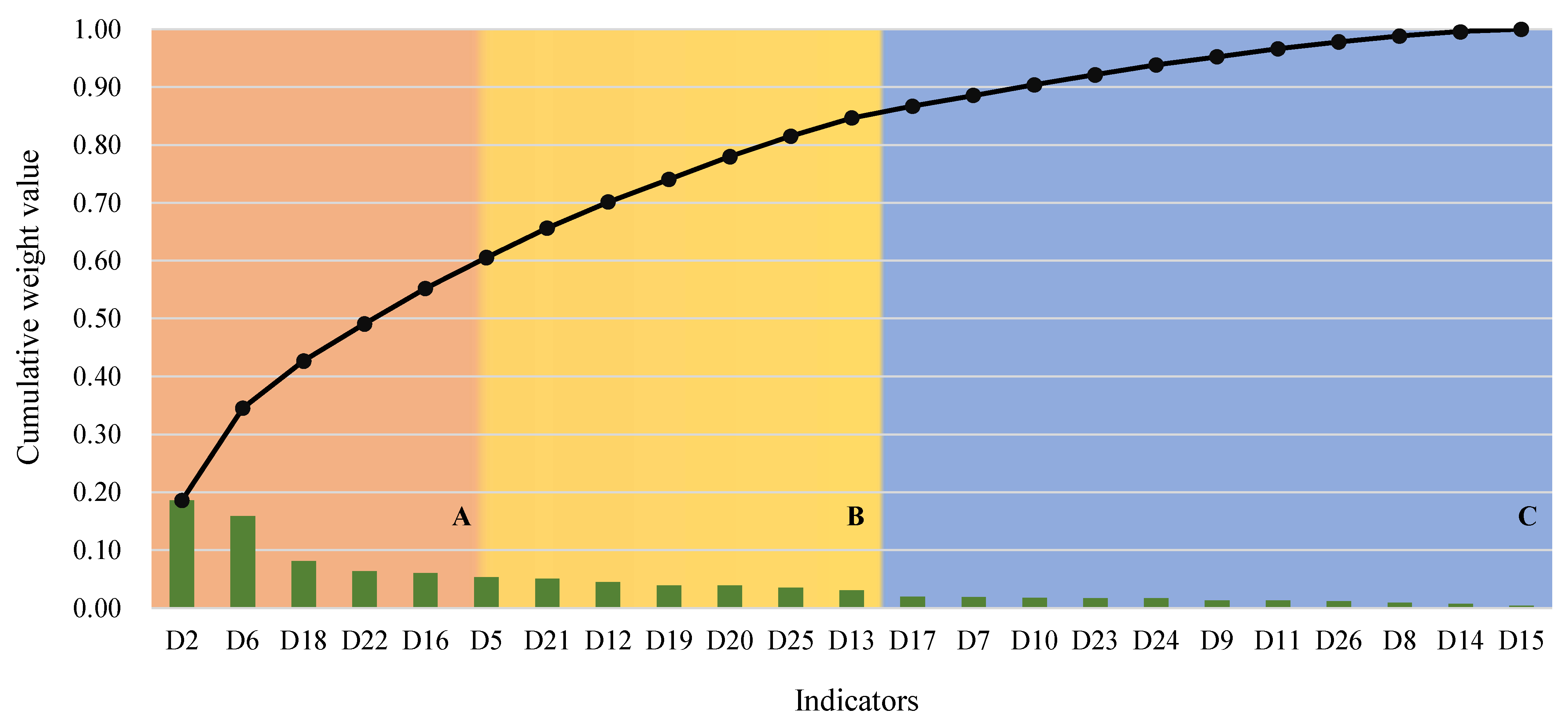
| Indicators | B1 | B2 | B3 | B4 | Total Weight of Indicators | Sort |
|---|---|---|---|---|---|---|
| 0.371 | 0.371 | 0.094 | 0.163 | |||
| Merging area single-vehicle speed D2 | 0.429 | 0.073 | 0.186 | 1 | ||
| Driver’s driving age D5 | 0.143 | 0.053 | 6 | |||
| Driver’s mental state D6 | 0.429 | 0.159 | 2 | |||
| OBU communication time delay D7 | 0.051 | 0.019 | 14 | |||
| Merging area average single-vehicle travel time D8 | 0.027 | 0.010 | 21 | |||
| Merging area total average queue length D9 | 0.037 | 0.014 | 18 | |||
| Merging area total average travel time D10 | 0.048 | 0.018 | 15 | |||
| Merging area average saturation D11 | 0.037 | 0.014 | 19 | |||
| Merging area total average speed D12 | 0.121 | 0.045 | 8 | |||
| V2V communication delay D13 | 0.084 | 0.031 | 12 | |||
| Merging area equipment sensing and identification delay D14 | 0.081 | 0.008 | 22 | |||
| Merging area RSU communication delay D15 | 0.047 | 0.004 | 23 | |||
| Central cloud network communication security protection D16 | 0.375 | 0.061 | 5 | |||
| Central cloud network communication delay D17 | 0.125 | 0.020 | 13 | |||
| Central cloud data security protection D18 | 0.500 | 0.081 | 3 | |||
| Weather recognition accuracy of OBU D19 | 0.106 | 0.039 | 9 | |||
| Road condition recognition accuracy of OBU D20 | 0.106 | 0.039 | 10 | |||
| Forward obstacle recognition accuracy D21 | 0.138 | 0.051 | 7 | |||
| Lane change recognition accuracy in front D22 | 0.172 | 0.064 | 4 | |||
| Communication delay of RSU by electromagnetic interference D23 | 0.186 | 0.017 | 16 | |||
| Communication delay of RSU by natural disasters D24 | 0.186 | 0.017 | 17 | |||
| Road obstacle warning D25 | 0.375 | 0.035 | 11 | |||
| Road condition recognition accuracy of RSU D26 | 0.125 | 0.012 | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Li, H.; Hu, Z.; Liu, K.; Hou, Y. Evaluation Index for IVIS Integration Test under a Closed Condition Based on the Analytic Hierarchy Process. Electronics 2022, 11, 3830. https://doi.org/10.3390/electronics11223830
Chen J, Li H, Hu Z, Liu K, Hou Y. Evaluation Index for IVIS Integration Test under a Closed Condition Based on the Analytic Hierarchy Process. Electronics. 2022; 11(22):3830. https://doi.org/10.3390/electronics11223830
Chicago/Turabian StyleChen, Jialiang, Huizhe Li, Zhaozheng Hu, Kai Liu, and Yue Hou. 2022. "Evaluation Index for IVIS Integration Test under a Closed Condition Based on the Analytic Hierarchy Process" Electronics 11, no. 22: 3830. https://doi.org/10.3390/electronics11223830