

A Smart ANN-Based Converter for Efficient Bidirectional Power Flow in Hybrid Electric Vehicles

Abstract
:1. Introduction
2. Architecture and Operating Modes
2.1. Dual Low-Voltage Sources Powering Mode
- (a)
- Stage 1 [t0 < t < t1]: Time period at this point is (1 − Dt)Ts. As shown in Figure 4a, switches M1 and M3 are ON, whereas switches M2 and M4 are OFF. Voltage across the first inductor Lf, which drops linearly from its original value, is represented by the differential between the charge pump voltage, and the lower side voltage . Voltage across the second inductor Ls charged by the energy source, increases linearly. Characteristic equations in stage 1 in terms of voltage across the inductors Lf and Ls are denoted by Equations (1) and (2):
- (b)
- Stage 2 [t1 < t < t2]: Time interval during this stage is (Dt − 0.5)Ts. M3 and M4 switches are ON, while M1 and M2 switches are OFF as shown in Figure 4b. Lower side voltages, , are located between the first and second inductors. Inductor currents increase linearly. Characteristic equations in stage 2 in terms of voltage across the inductors Lf and Ls are denoted by Equations (3) and (4):
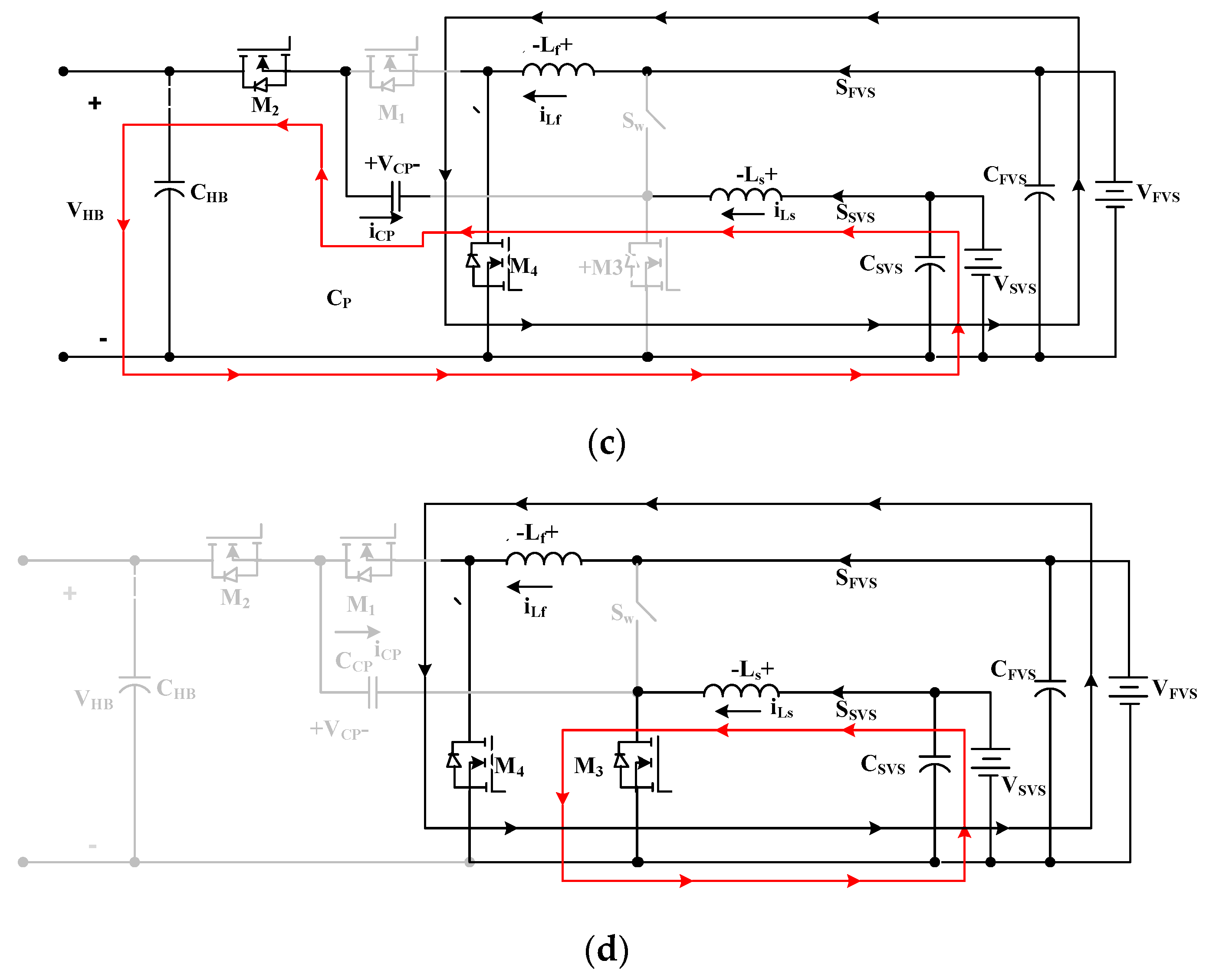
- (c)
- Stage 3 [t2 < t < t3]: The time interval at this stage is (1 − Dt)Ts. M1 and M3 switches are off, while M2 and M4 switches are on, as shown in Figure 4c. Characteristic equations in stage 3, in terms of voltage across the inductors Lf and Ls, are denoted by Equations (5) and (6):
- (d)
- Stage 4 [t3 < t < t4]: Time interval at this stage is (Dt − 0.5)Ts. M3 and M4 switches are on, while the M1 and M2 switches are off, as shown in Figure 4d. Characteristic equations in stage 4, in terms of voltage across the inductors Lf and Ls, are denoted by Equations (7) and (8):
2.2. Regenerative Mode at High Voltage
- (a)
- Stage 1 [t0 < t < t1]: This stage is indicated in Figure 6a. Time interval is DtTs. Switches M1 and M3 are turned on, whereas switches M2 and M4 are turned off. Voltage across the main inductor, Lm, drops linearly from its original value. It is represented by the differential between the charge pump voltage, VCP and the lower side voltage, VFVS. An auxiliary inductor, La is charged by the energy source VAVS. Voltage across the auxiliary inductor, La increases linearly. Voltage across the inductors Lf and Lm in stage 1 is denoted by:
- (b)
- Stage 2 [t1 < t < t2]: Time interval in this stage is (0.5 − Dt)Ts. M3 and M4 switches are ON, while M1 and M2 switches are OFF, as shown in Figure 6b. Positive lower side voltages VMVS and VAVS are located between the first and second inductors, respectively. These inductor currents increase linearly. Under stage 2, the voltages between the inductors Lf and Ls are indicated by:
- (c)
- Stage 3 [t2 < t < t3]: Time interval is DtTs at this stage. Switches M1 and M3 are off. M2 and M4 switches are on, as shown in Figure 6c. The differential between the lower side voltages VFVS and the charge pump voltages VCP indicates the voltage across the main inductor Lf, and the lower side voltage VSVS. Its level is negative. Under stage 3, the voltages across the inductors Lf and Ls are denoted by:
- (d)
- Stage 4 [t3 < t < t4]: Time interval at this stage is (0.5 − Dt)Ts. M3 and M4 switches are on, while the M1 and M2 switches are off, as shown in Figure 6d. Under stage 4, the voltage across the inductors Lf and Ls is denoted by:
2.3. Buck/Boost Mode with Dual Low Voltage Sources
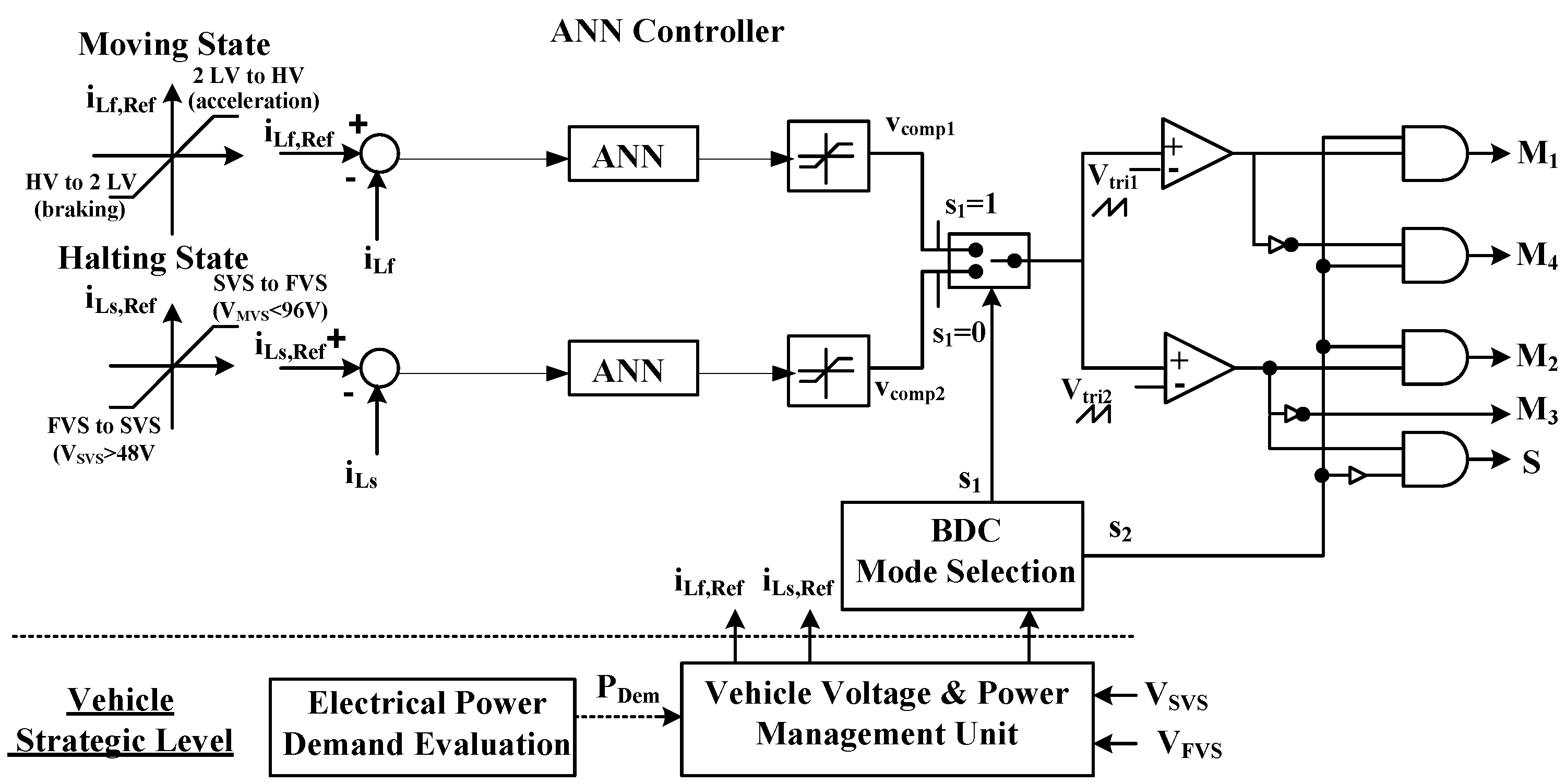
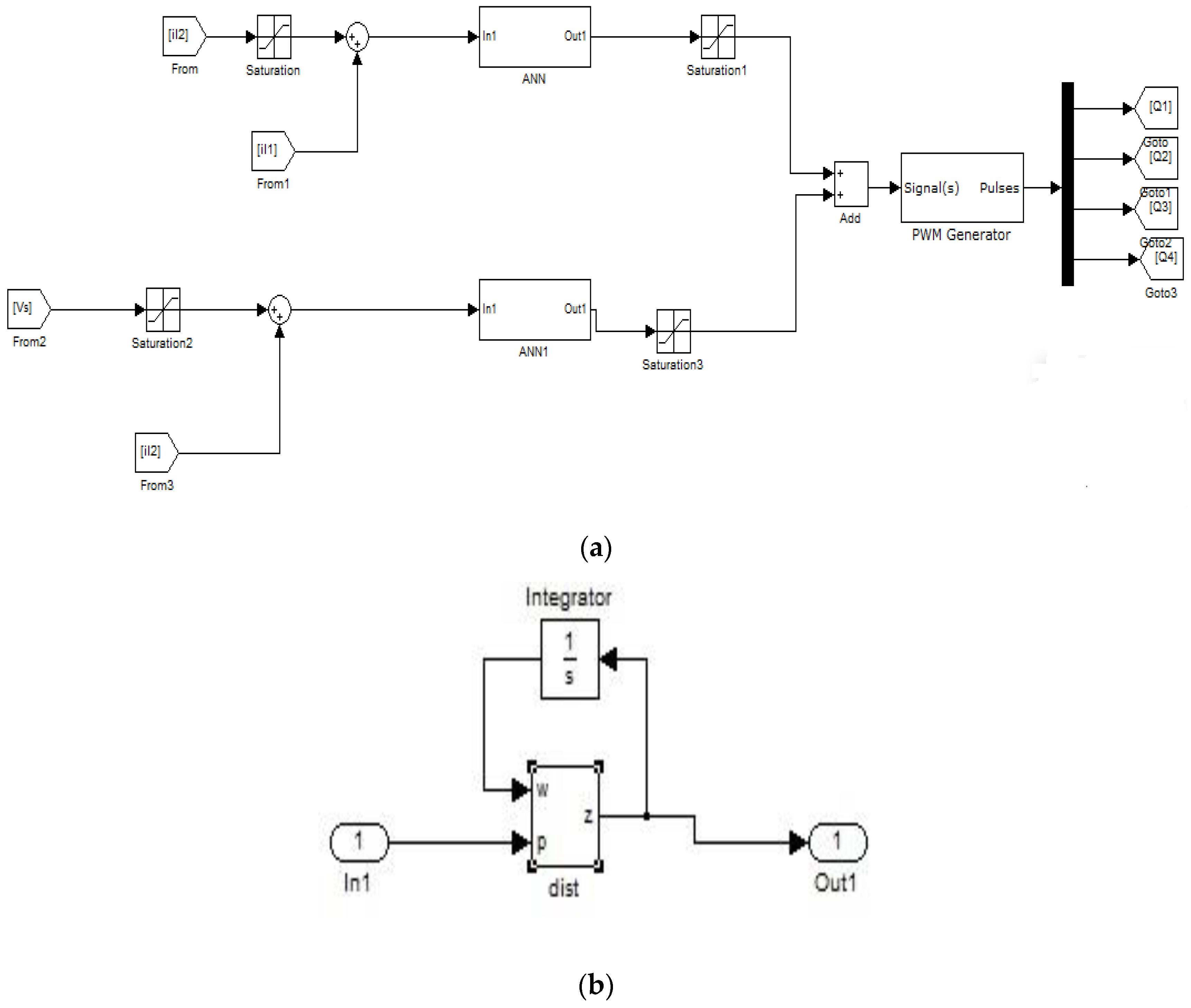
3. Converter Control
4. Discussion
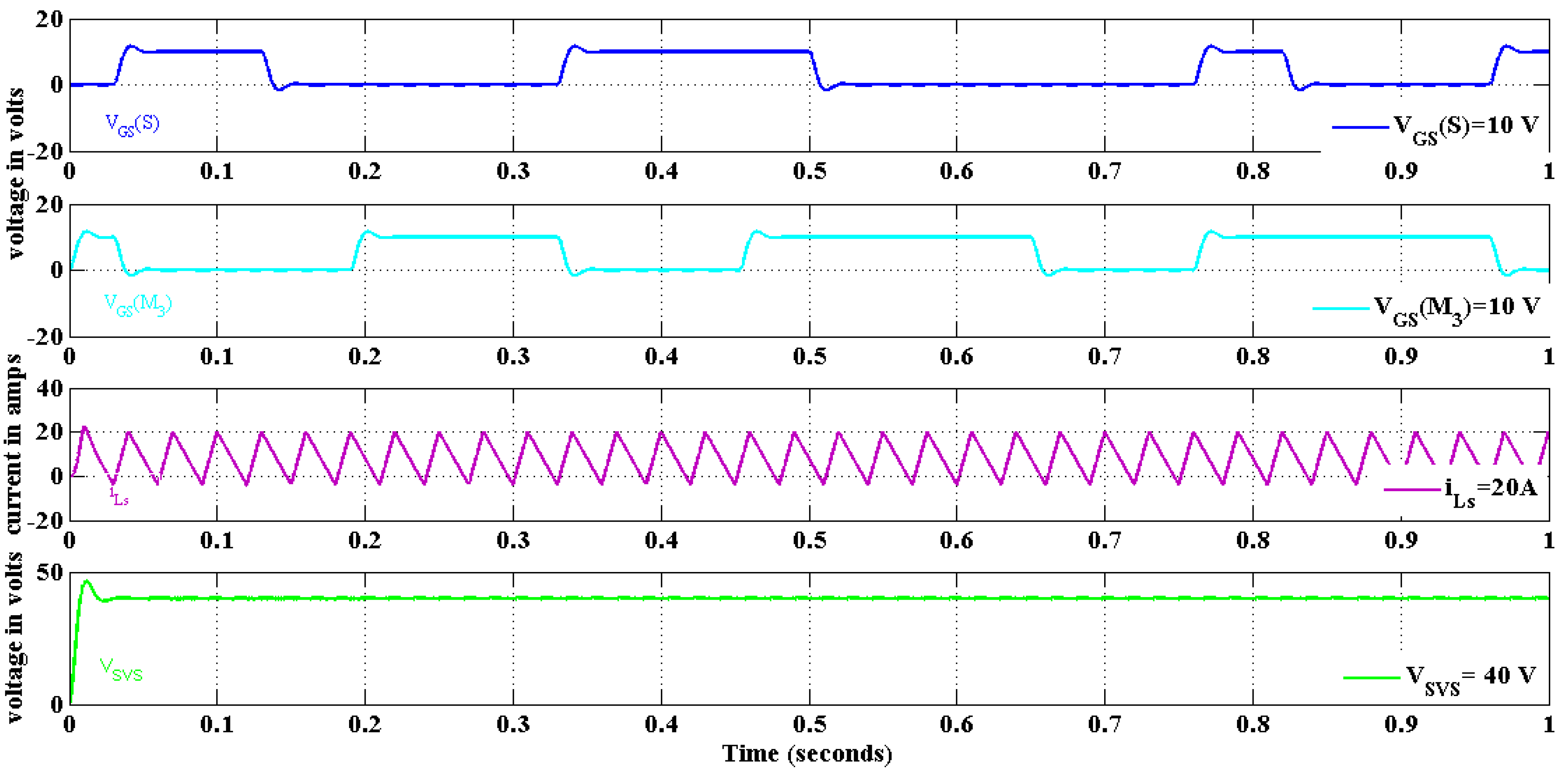
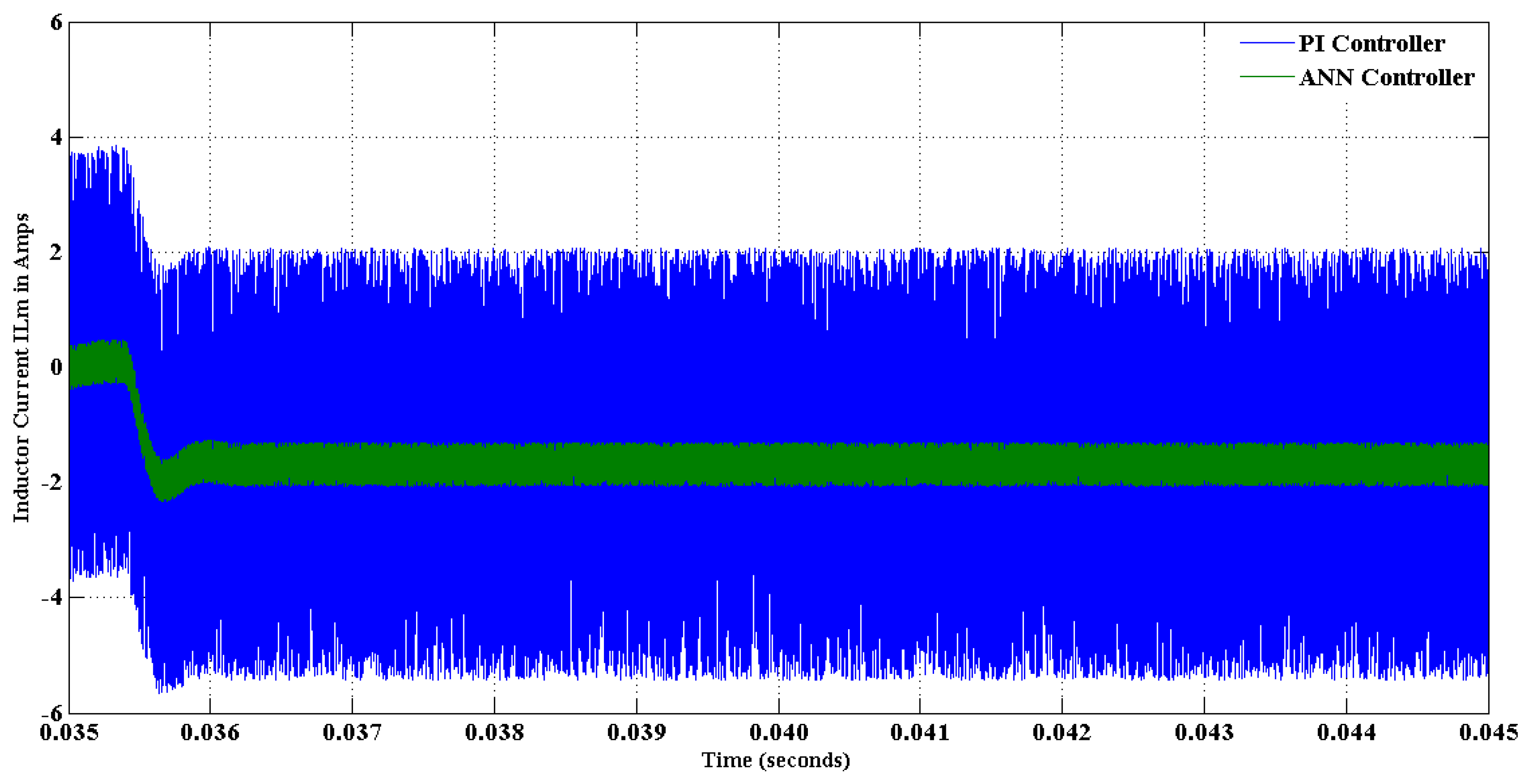
Comparison of PI and ANN Controller Output Waveforms
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Notations
| VHB | DC-bus high voltage |
| VFVS, VSVS | Dual low-voltage sources |
| CCP | Charge pump capacitor |
| M1, M2, M3, M4 | Four active switches |
| Lf, Ls | Phase inductors |
| iLf | Main phase inductor current |
| iLs | Auxiliary phase inductor current |
| SW, SFVS, SSVS | Three bidirectional switches |
| iCP | Charge pump current |
| CFVS | First voltage source capacitor |
| CSVS | Second voltage source capacitor |
References
- Ni, L. Energy Storage and Management for a Small Series Plug-in Hybrid Electric Vehicle. Ph.D. Thesis, University of Nebraska, Lincoln, NE, USA, 2010. [Google Scholar]
- Bethoux, O. Hydrogen Fuel Cell Road Vehicles: State of the Art and Perspectives. Energies 2020, 13, 5843. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Chan, C.C. Electric, hybrid, and fuel-cell vehicles: Architectures and modeling. IEEE Trans. Veh. Technol. 2010, 59, 589–598. [Google Scholar] [CrossRef]
- Donatantonio, F.; Ferrara, A.; Polverino, P.; Arsie, I.; Pianese, C. Novel Approaches for Energy Management Strategies of Hybrid Electric Vehicles and Comparison with Conventional Solutions. Energies 2022, 15, 1972. [Google Scholar] [CrossRef]
- Thounthong, P.; Chunkag, V.; Sethakul, P.; Davat, B.; Hinaje, M. Comparative study of fuel-cell vehicle hybridization with battery or supercapacitor storage device. IEEE Trans. Veh. Technol. 2009, 58, 3892–3904. [Google Scholar] [CrossRef]
- Rizzo, G.; Tiano, F.A.; Mariani, V.; Marino, M. Optimal Modulation of Regenerative Braking in Through-The-Road Hybridized Vehicles. Energies 2021, 14, 6835. [Google Scholar] [CrossRef]
- Al-Adsani, A.S.; Jarushi, A.M.; Beik, O. ICE/HPM generator range extender for a series hybrid EV powertrain. IET Electr. Syst. Transp. 2020, 10, 96–104. [Google Scholar] [CrossRef]
- Rajashekara, K. Present status and future trends in electric vehicle propulsion technologies. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 3–10. [Google Scholar] [CrossRef]
- Aouichak, I.; Jacques, S.; Bissey, S.; Reymond, C.; Besson, T.; Le Bunetel, J.-C. A Bidirectional Grid-Connected DC–AC Converter for Autonomous and Intelligent Electricity Storage in the Residential Sector. Energies 2022, 15, 1194. [Google Scholar] [CrossRef]
- Daviran Keshavarzi, M.; Ali, M.H. A Novel Bidirectional DC-DC Converter for Dynamic Performance Enhancement of Hybrid AC/DC Microgrid. Electronics 2020, 9, 1653. [Google Scholar] [CrossRef]
- Choi, Y.; Chang, N.; Kim, T. DC–DC Converter-Aware Power Management for Low-Power Embedded Systems. IEEE Trans. Comput. -Aided Des. Integr. Circuits Syst. 2007, 26, 1367–1381. [Google Scholar] [CrossRef]
- DErb, C.; Onar, O.C.; Khaligh, A. Bi-directional charging topologies for plug-in hybrid electric vehicles. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 2066–2072. [Google Scholar]
- Du, Y.; Lukic, S.; Jacobson, B.; Huang, A. Review of high power isolated bi-directional DC–DC converters for PHEV/EV DC charging infrastructure. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 553–560. [Google Scholar]
- Zhou, M.; Fu, J.; Wu, X.; Yang, M.; Zhang, Z. A Non-isolated High-gain DC/DC Converter Suitable for Fuel Cell Vehicles. J. Electr. Eng. Technol. 2021, 17, 271–282. [Google Scholar] [CrossRef]
- Choi, Y.G.; Lee, S.W.; Lee, H.S.; Lee, S.C.; Kang, B. Increase in Power Conversion Efficiency of Bidirectional DC-DC Converter Using 1:1 Transformer and Pulse-Frequency Modulation Control. IEEE Trans. Power Electron. 2018, 33, 10539–10549. [Google Scholar] [CrossRef]
- Lin, C.; Yang, L.; Wu, G.W. Study of a non-isolated bidirectional DC-DC converter. IET Power Electron. 2012, 6, 30–37. [Google Scholar] [CrossRef]
- Deepika, K.K.; Kumar, J.; Varma, P.; Sura, S.; Sankar, R. Design of Back-to-Back Converter Interface for Electric Spring in a Distribution System. Front. Energy Res. 2022, 10, 765899. [Google Scholar] [CrossRef]
- Fasugba, M.A.; Krein, P.T. Cost benefits and vehicle-to-grid regulation services of unidirectional charging of electric vehicles. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 827–834. [Google Scholar]
- Choe, G.-Y.; Kim, J.-S.; Lee, B.-K.; Won, C.-Y.; Lee, T.-W. A bidirectional battery charger for electric vehicles using photovoltaic PCS systems. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Wang, J.; Wang, B.; Zhang, L.; Wang, J.; Shchurov, N.I.; Malozyomov, B.V. Malozyomov, Review of Bidirectional DC-DC Converter Topologies for Hybrid Energy Storage System of New Energy Vehicles. Green Energy Intell. Transp. 2022, 1, 100010. [Google Scholar] [CrossRef]
- Lai, C.-M.; Lin, Y.-C.; Lee, D. Study and implementation of a two-phase interleaved bidirectional DC/DC converter for vehicle and dc-microgrid systems. Energies 2015, 8, 9969–9991. [Google Scholar] [CrossRef]
- Lai, C.-M. Development of a novel bidirectional DC/DC converter topology with high voltage conversion ratio for electric vehicles and DC-microgrids. Energies 2016, 9, 410. [Google Scholar] [CrossRef] [Green Version]
- Haihua, Z.; Khambadkone, A.M. Hybrid modulation for dual active bridge bi-directional converter with extended power range for ultracapacitor application. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008; pp. 1–8. [Google Scholar]
- Lai, C.M.; Lin, Y.J.; Hsieh, M.H.; Li, J.T. A newly-designed multiport bidirectional power converter with battery/supercapacitor for hybrid electric/fuel-cell vehicle system. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Busan, Korea, 1–4 June 2016; pp. 163–166. [Google Scholar] [CrossRef]
- Lai, C.M.; Cheng, Y.H.; Hsieh, M.H.; Lin, Y.C. Development of a Bidirectional DC/DC Converter With Dual-Battery Energy Storage for Hybrid Electric Vehicle System. IEEE Trans. Veh. Technol. 2018, 67, 1036–1052. [Google Scholar] [CrossRef]
- Kang, H.S.; Kim, S.M.; Bak, Y.; Lee, K.B. A controller design for a stability improvement of an integrated charging system in hybrid electric vehicle. IFAC 2019, 52, 141–146. [Google Scholar] [CrossRef]
- Barhoumi, E.M.; Ben Belgacem, I.; Khiareddine, A.; Zghaibeh, M.; Tlili, I. A Neural Network-Based Four Phases Interleaved Boost Converter for Fuel Cell System Applications. Energies 2018, 11, 3423. [Google Scholar] [CrossRef] [Green Version]
- Moreno, J.; Ortúzar, M.E.; Dixon, J.W. Energy-management system for a hybrid electric vehicle, using ultracapacitors and neural networks. IEEE Trans. Ind. Electron. 2006, 53, 614–623. [Google Scholar] [CrossRef]
- Li, Z.; Pang, J.; Xu, C.; Zhang, C. Electric vehicle charging system pressure control based on fuzzy neural network PID control. In Proceedings of the 2021 IEEE Conference on Telecommunications, Optics and Computer Science (TOCS), Shenyang, China, 10–11 December 2021; pp. 873–877. [Google Scholar] [CrossRef]
- Wang, P.; Li, X. Estimation and Prediction on State of Health of Electric Vehicle Battery Based on BP Neural Network. In Proceedings of the 2021 IEEE 3rd International Conference on Frontiers Technology of Information and Computer (ICFTIC), Greenville, SC, USA, 12–14 November 2021; pp. 729–732. [Google Scholar] [CrossRef]
- Reddy, K.J.; Sudhakar, N. ANFIS-MPPT control algorithm for a PEMFC system used in electric vehicle applications. Int. J. Hydrog. Energy 2019, 44, 15355–15369. [Google Scholar] [CrossRef]
- Wang, B.; Wang, C.; Hu, Q.; Ma, G.; Zhou, J. Adaptive sliding mode control with enhanced optimal reaching law for boost converter based hybrid power sources in electric vehicles. J. Power Electron. 2019, 19, 549–559. [Google Scholar]
- Liu, K.; Hu, X.; Yang, Z.; Xie, Y.; Feng, S. Lithium-ion battery charging management considering economic costs of electrical energy loss and battery degradation. Energy Convers. Manag. 2019, 195, 167–179. [Google Scholar] [CrossRef]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operation Modes | Switches in ON | Switches in OFF | Control Switches | Synchronous Rectifiers (SR) |
|---|---|---|---|---|
| Dual low-voltage sources powering mode (Accelerating, x1 = 1, x2 = 1) | SFVS,SSVS | Sw | M3,M4 | M1,M2 |
| DC-bus energy-regenerative mode at high-voltage (Braking, x1 = 1, x2 = 1) | SFVS,SSVS | Sw | M1,M2 | M3,M4 |
| Dual low-voltage sources buck mode (FVS to SVS, x1 = 0, x2 = 0) | SFVS,SSVS | M1,M2,M4 | Sw | M3 |
| Dual low-voltage sources boost mode (FVS to SVS, x1 = 0, x2 = 0) | SFVS,SSVS | M1,M2,M4 | M3 | Sw |
| Parameters | Ratings |
|---|---|
| Inductors | Lf = Ls = 250 µH |
| High-side capacitor | CHB = 1880 µF |
| Low-side capacitor | CFVS = CSVS = 400 µF |
| Charge-pump capacitor | CCP = 10 µF |
| ESR of inductance | RLf = RLs = RL = 50 mꭥ |
| ESR of capacitance | RCB = 20 mꭥ,RFVS = RSVS = 50 mꭥ |
| Line resistance | RFVS = 12 mꭥ, RSVS = 6 mꭥ |
| First voltage source | FVS = 96 V |
| Second voltage source | SVS = 40 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sankar, R.S.R.; Deepika.K, K.; Alsharef, M.; Alamri, B. A Smart ANN-Based Converter for Efficient Bidirectional Power Flow in Hybrid Electric Vehicles. Electronics 2022, 11, 3564. https://doi.org/10.3390/electronics11213564
Sankar RSR, Deepika.K K, Alsharef M, Alamri B. A Smart ANN-Based Converter for Efficient Bidirectional Power Flow in Hybrid Electric Vehicles. Electronics. 2022; 11(21):3564. https://doi.org/10.3390/electronics11213564
Chicago/Turabian StyleSankar, R.S.Ravi, Keerthi Deepika.K, Mohammad Alsharef, and Basem Alamri. 2022. "A Smart ANN-Based Converter for Efficient Bidirectional Power Flow in Hybrid Electric Vehicles" Electronics 11, no. 21: 3564. https://doi.org/10.3390/electronics11213564