
Infrared Weak and Small Target Detection Based on Top-Hat Filtering and Multi-Feature Fuzzy Decision-Making


Abstract
:1. Introduction
2. Methodology
2.1. Multi-Structural Element Top-Hat Filtering
2.2. Adaptive Threshold Segmentation
2.3. Multi-Feature Fuzzy Decision-Making
2.3.1. Maximum Pixel Value after Filtering
2.3.2. Sum of Orientation Gradients
2.3.3. Center Pixel Contrast
2.3.4. Regional Gradient
2.3.5. Nonlinear Fuzzy Decision
- (1)
- For a more uniform and simple background, top-hat filtering can suppress the background and enhance the target.
- (2)
- For bright noise, the center pixel contrast can effectively suppress it and further enhance the target.
- (3)
- For complex edge areas, the regional gradient can effectively suppress them, and the contrast of the center pixel can also suppress some edges.
- (4)
- For the target, all four features can enhance it.
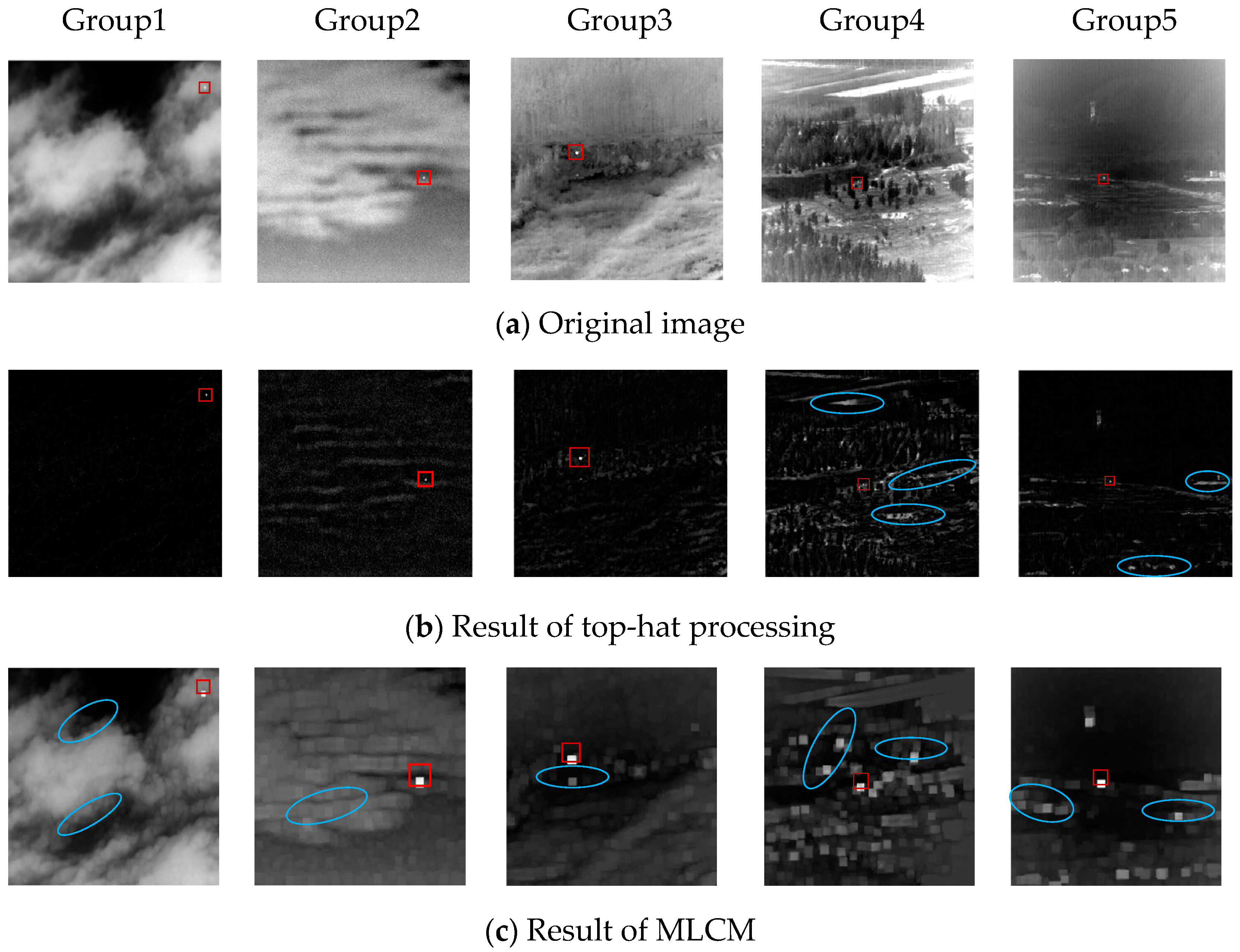
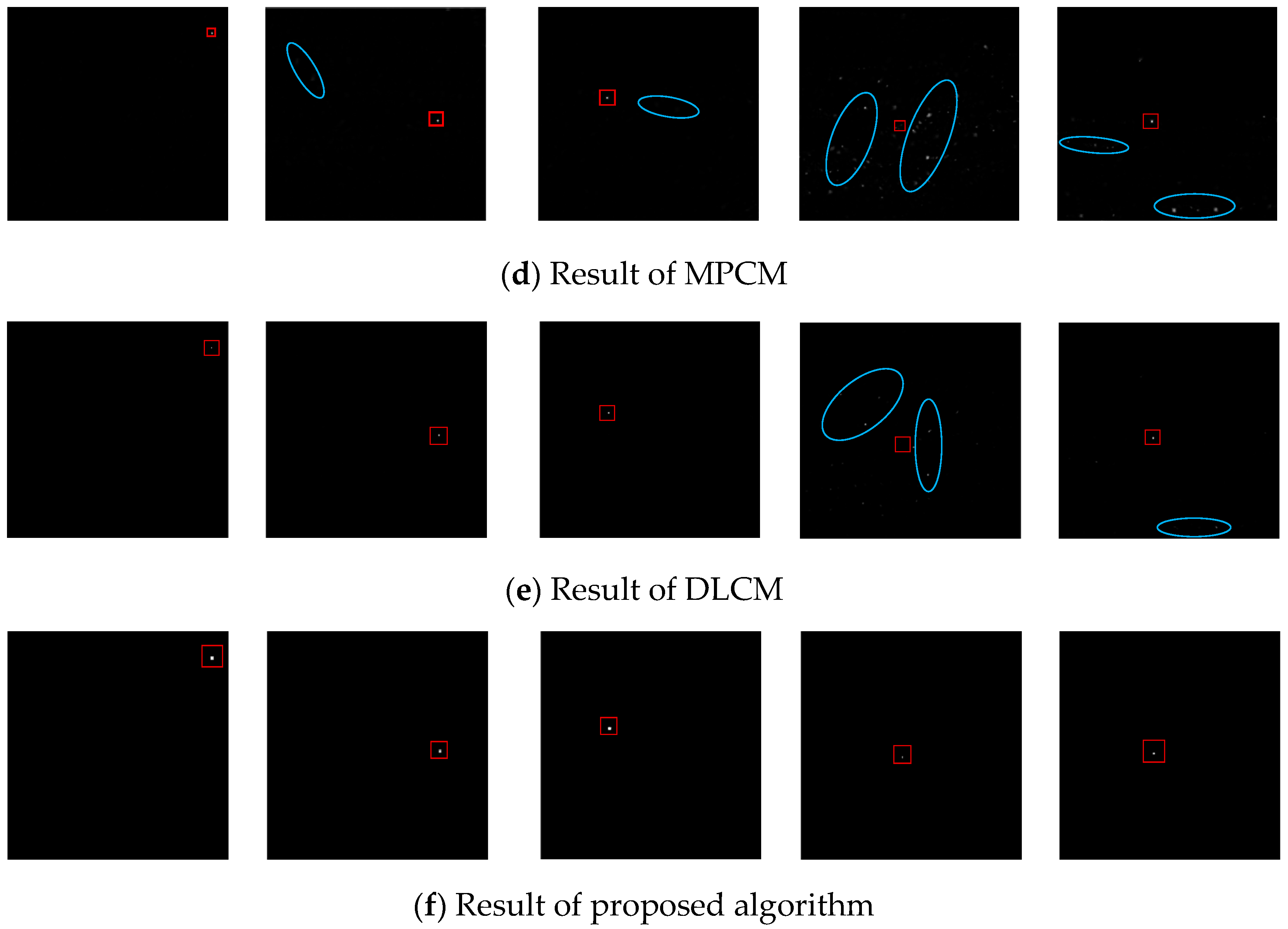
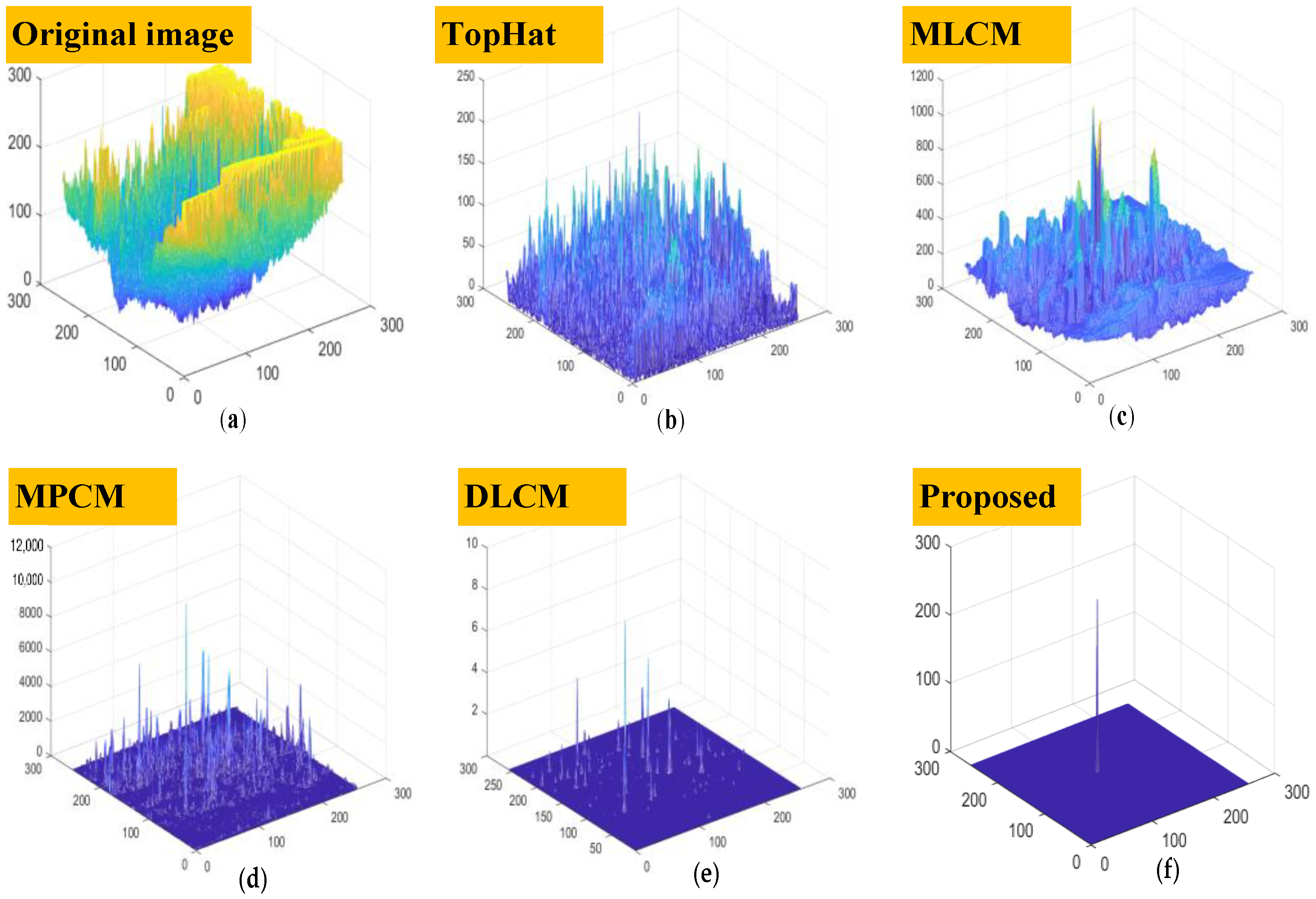
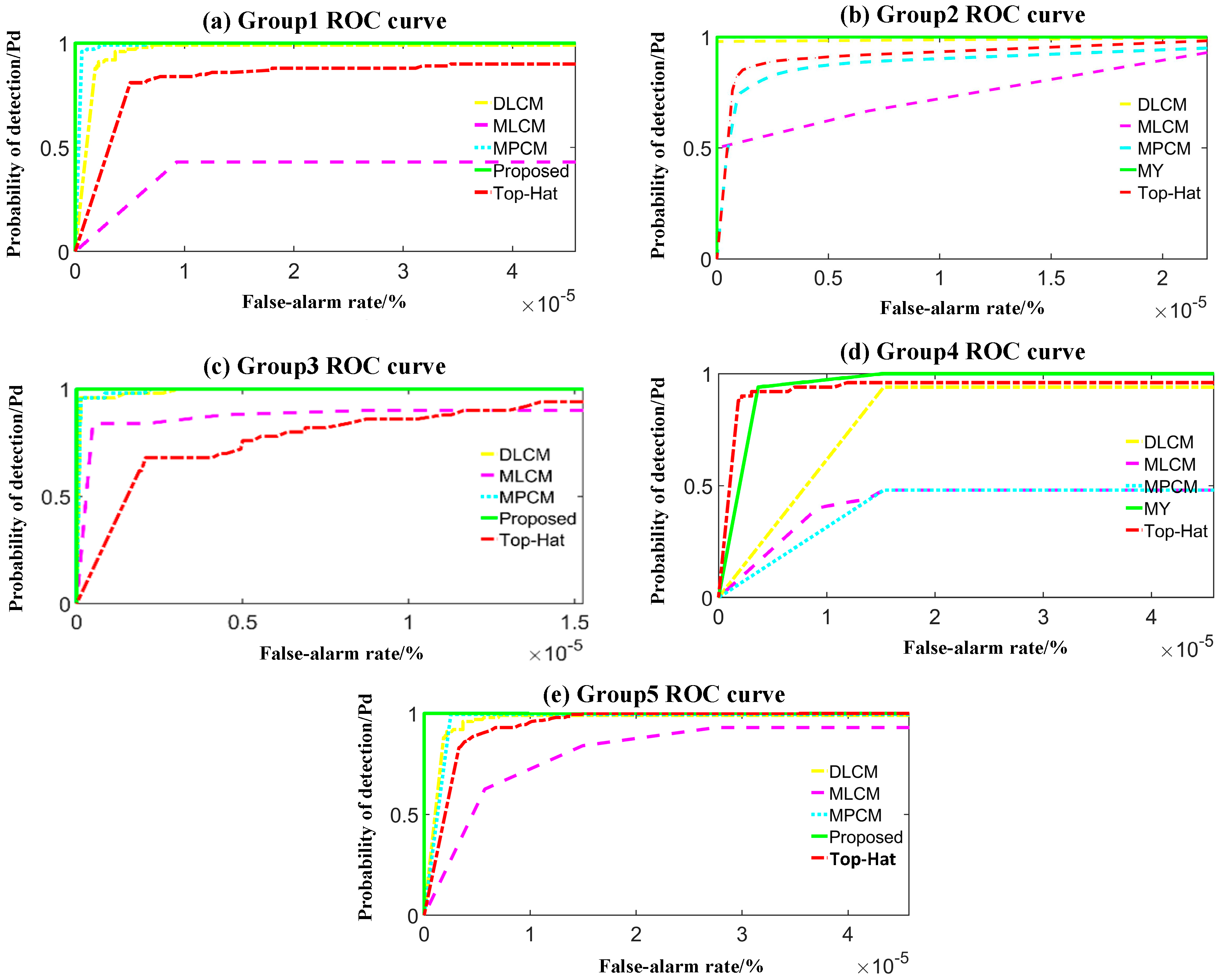
3. Experimental Results and Discussions
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, K.; Mao, X. Detectability of infrared small targets. Infrared Phys. Technol. 2010, 53, 208–217. [Google Scholar] [CrossRef]
- Liu, D.; Cao, L.; Li, Z.; Liu, T.; Che, P. Infrared Small Target Detection Based on Flux Density and Direction Diversity in Gradient Vector Field. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2528–2554. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A.G. Infrared Patch-Image Model for Small Target Detection in a Single Image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef] [PubMed]
- Shao, X.; Fan, H.; Lu, G.; Xu, J. An improved infrared dim and small target detection algorithm based on the contrast mechanism. of human visual system. Infrared Phys. Technol. 2012, 55, 403–408. [Google Scholar] [CrossRef]
- Thanh, N.T.; Sahli, H.; Hao, D.N. Infrared Thermography for Buried Landmine Detection: Inverse Problem Setting. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3987–4004. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y. Reweighted Infrared Patch-Tensor Model with Both Nonlocal and Local Priors for Single-Frame Small Target Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3752–3767. [Google Scholar] [CrossRef] [Green Version]
- Reed, I.S.; Gagliardi, R.M.; Shao, H.M. Application of Three-Dimensional Filtering to Moving Target Detection. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 898–905. [Google Scholar] [CrossRef]
- Chen, X. A new framework of multistage parametric inference. Proc. SPIE 2010, 7666, 7666. [Google Scholar]
- Halder, A.; Shekhar, S.; Kant, S.; Mubarki, M.A.; Pandey, A. A New Efficient Adaptive Spatial Filter for Image Enhancement. In Proceedings of the 2010 Second International Conference on Computer Engineering and Applications, Bali, Indonesia, 19–21 March 2010; pp. 244–246. [Google Scholar]
- Deshpande, S.D.; Er, M.H.; Venkateswarlu, R.; Chan, P. Max-mean and Max-median filters for detection of small-targets. Proc. SPIE 1999, 3809, 74–83. [Google Scholar]
- Bai, X.; Zhou, F. Analysis of new top-hat transformation and the application for infrared dim small target detection. Pattern Recognit. 2010, 43, 2145–2156. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Li, H.; Wei, Y.; Xia, T.; Tang, Y.Y. A Local Contrast Method for Small Infrared Target Detection. IEEE Trans. Geosci. Remote Sens. 2014, 52, 574–581. [Google Scholar] [CrossRef]
- Han, J.; Ma, Y.; Zhou, B.; Fan, F.; Liang, K.; Fang, Y. A Robust Infrared Small Target Detection Algorithm Based on Human Visual System. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2168–2172. [Google Scholar] [CrossRef]
- Zhang, H. Infrared small target detection based on local intensity and gradient properties. Infrared Phys. Technol. 2018, 89, 88–96. [Google Scholar] [CrossRef]
- Wei, Y.; You, X.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Han, J.; Liang, K.; Zhou, B.; Zhu, X.; Zhao, J.; Zhao, L. Infrared Small Target Detection Utilizing the Multiscale Relative Local Contrast Measure. IEEE Geosci. Remote Sens. Lett. 2018, 15, 612–616. [Google Scholar] [CrossRef]
- Wu, L.; Ma, Y.; Fan, F.; Wu, M.; Huang, J. A Double-Neighborhood Gradient Method for Infrared Small Target Detection. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1476–1480. [Google Scholar] [CrossRef]
- Felix, R.; Reddig, S.; Adelhof, A. Multiple attribute decision making based on fuzzy relationships between objectives and its application in metal forming. In Proceedings of the Second IEEE International Conference on Fuzzy Systems, San Francisco, CA, USA, 28 March–1 April 1993; Volume 1, pp. 378–383. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resolution | Target Size | Scenes Description | Number | |
|---|---|---|---|---|
| Group 1 | 512 × 640 | 7 7 | Strong edge interference | 100 |
| Group 2 | 200 × 250 | 3 3 | Complex background interference | 80 |
| Group 3 | 256 × 256 | 4 3 | Strong noise interference | 100 |
| Group 4 | 256 × 256 | 2 1 | Strong noise and edge interference | 50 |
| Group 5 | 256 × 256 | 2 3 | Strong noise interference | 80 |
| BSF | |||||
|---|---|---|---|---|---|
| Group1 | Group2 | Group3 | Group4 | Group5 | |
| Top-Hat | 6.6029 | 0.4539 | 0.2184 | 0.4471 | 0.0415 |
| MLCM | 11.3216 | 2.4539 | 2.5887 | 1.6697 | 0.8261 |
| MPCM | 14.5995 | 4.1474 | 2.8635 | 14.7753 | 1.4810 |
| DLCM | 43.0103 | 38.3342 | 48.6835 | 25.9559 | 2.3942 |
| Proposed | 124.9370 | 86.1305 | 113.9134 | 38.9257 | 16.0827 |
| SCRG | |||||
| Group1 | Group2 | Group3 | Group4 | Group5 | |
| Top-Hat | 4.4733 | 1.2706 | 0.3678 | 0.1022 | 0.3383 |
| MLCM | 12.0531 | 5.0796 | 3.8197 | 1.1821 | 1.1743 |
| MPCM | 10.3466 | 16.3293 | 2.7655 | 4.1563 | 1.7970 |
| DLCM | 58.0185 | Inf | 87.2476 | 13.7590 | 23.3038 |
| Proposed | Inf | Inf | 175.4612 | 48.2194 | 71.1720 |
| Groups | Image Resolution | Top-Hat | MLCM | MPCM | DLCM | Proposed |
|---|---|---|---|---|---|---|
| Group 1 | 512 × 640 | 0.002523 | 0.166741 | 0.189739 | 0.211012 | 0.059314 |
| Group 2 | 200 × 250 | 0.001328 | 0.057679 | 0.070651 | 0.061638 | 0.060824 |
| Group 3 | 256 × 256 | 0.001187 | 0.061960 | 0.062146 | 0.070349 | 0.045858 |
| Group 4 | 256 × 256 | 0.001238 | 0.062114 | 0.061871 | 0.067620 | 0.069425 |
| Group 5 | 256 × 256 | 0.001468 | 0.070652 | 0.067944 | 0.069628 | 0.052984 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, D.; Bai, Z.; Zhang, J. Infrared Weak and Small Target Detection Based on Top-Hat Filtering and Multi-Feature Fuzzy Decision-Making. Electronics 2022, 11, 3549. https://doi.org/10.3390/electronics11213549
Yang D, Bai Z, Zhang J. Infrared Weak and Small Target Detection Based on Top-Hat Filtering and Multi-Feature Fuzzy Decision-Making. Electronics. 2022; 11(21):3549. https://doi.org/10.3390/electronics11213549
Chicago/Turabian StyleYang, Degui, Zhengyang Bai, and Junchao Zhang. 2022. "Infrared Weak and Small Target Detection Based on Top-Hat Filtering and Multi-Feature Fuzzy Decision-Making" Electronics 11, no. 21: 3549. https://doi.org/10.3390/electronics11213549