2. System Model
In this section, we will introduce the model of a UAV-assisted cellular network communication system based on an IRS and the model of the UAV’s optimal deployment position.
The right half of
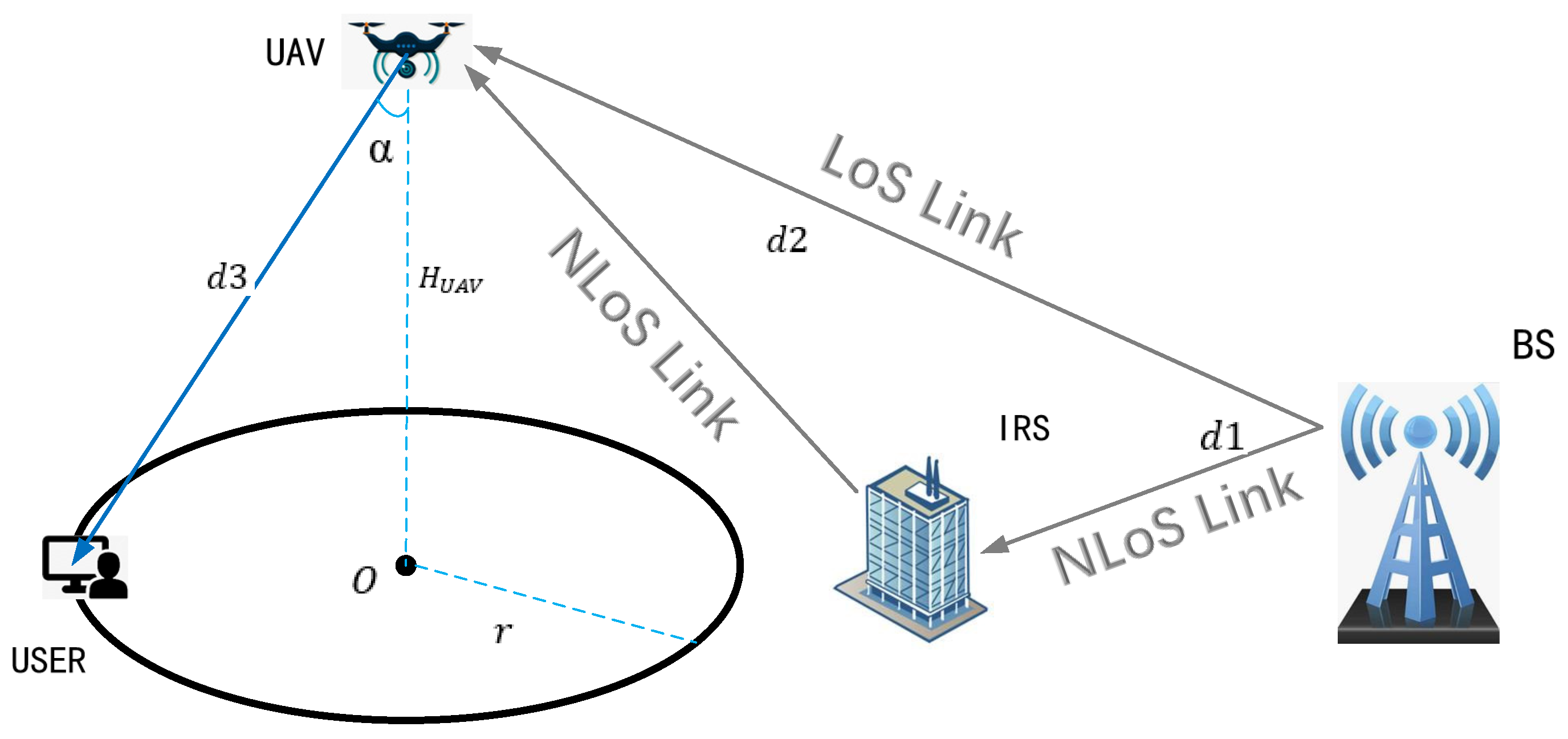
Figure 1 shows the model of the BS–IRS–UAV system. The whole system is divided into two links for signal transmission: the LoS link, in which the signal is transmitted from the base station to the UAV side, and the NLoS link, in which the IRS is used to promote the signal transmission of the link. The downdip antenna of the base station sends most of the signals to the angle at which the IRS is located. After receiving the signals from the downdip antenna, the IRS composed of K = M × N reflecting elements dynamically programs and reconfigures the signals, which are reflected to the position of the UAV [
25]. The UAV receives the signals directly from the line-of-sight path and the non-line-of-sight path reflected by the IRS elements. By using the IRS to align the phase of individually reflected signals with that of the line-of-sight path, these signals are constructively combined on the UAV to improve the received signal power.
Assume that the signal sent by the base station is expressed as:
where
is the amplitude of the
mth row and
nth column signal sent from the base station to the IRS, and
is the phase of the
mth row and
nth column signal sent from the base station to the IRS. Due to the base station itself and the influence of the channel environment, the amplitudes and phases of the signal received by each element on the reflecting surface are different, so the overall signal expression is actually composed of multiple signals with different amplitudes and phases. In order to facilitate the reception of signals, the IRS adjusts the amplitude and phase of the received signals. The signal’s expression after being reflected by the IRS is:
where
is the amplitude adjustment factor of the IRS element at the
mth row and
nth column, and
is the phase adjustment factor of the IRS element at the
mth row and
nth column. The choice of IRS is based on the actual needs of the application and the received signal for adaptive adjustment and change. The IRS will flexibly adjust the received signal according to the actual needs.
According to the above analysis, the expression of the signal received by the UAV should be [
26]:
where
is the signal received at the LoS link, and
is the signal reflected by the
Kth IRS element. The
k elements of the IRS are superimposed to form the received signal of the NLoS link, and
is the additive white Gaussian noise at the UAV receiver, with a mean value of 0 and a variance of
. Next, we deduce the channel coefficients
and
of the two links through the relationship between the transmitted power and lost power.
Since cellular network data base stations are already equipped with down-sloping antennas to serve terrestrial users, the power over the NLoS link is much higher than that over the LoS link. By querying a 3GPP website [
27], the following expression of the signal power of the base station downdip angle can be obtained:
where
is the angle between the line between the BS and IRS or the line between the BS, UAV, and the horizontal line (which is negative if it is higher than the horizontal line);
is the dip angle of the base station antenna, which can be found by querying 3GPP and is set to
.
is equal to 10 and
dB. The power transmitted to the LoS and NLoS links can be obtained with the following formula:
where
is the original transmitting power of the base station, whose value is set as 46 dBm.
When signals are transmitted in the LoS link and NLoS link, corresponding power losses are generated. Considering the different link attributes, the power losses of the two links are also calculated differently. In 3GPP, the path loss formula of the LoS link is:
where
d is the distance between the signal transmitting point at the base station and the UAV, and
f is the carrier frequency.
The power loss of the NLoS link also changes with the increase in the path, and the path loss expression is different before and after 22.5 m. The expression of the function between the distance and power of the NLoS link is as follows:
In the above formula, the expressions of
and
are as follows:
Given the above path loss power expression for the NLoS link, we divide the NLoS link into two paths: the path from the BS to element K and the path from element K to the UAV.
Assuming that the distance between the base station and a component of the IRS is
, then the power loss from the base station to element K is:
Assuming that the distance from element K to the UAV is
, then the power loss from element K to the UAV is:
After the transmission power and path loss are obtained, the receiving power
and
of the LoS link and NLoS link is:
In the above formula,
and
are the angle between the UAV and the base station and the angle between the IRS element K and the base station, respectively. The received power of the two links can be obtained, and
and
are:
In order to obtain the optimal signal, we set the phases
and
to 0, and then obtain the signal expression of the UAV receiver:
Therefore, combined with additive white Gaussian noise, the SNR at the UAV is expressed as:
where
is the power of the additive white Gaussian noise, and
is the average transmitted energy of each symbol.
According to communication coding theory, the SER can represent the quality of a signal, and it can be expressed as:
The error function (ERF) is expressed as:
The right-tail function of the standard normal distribution—the
Q function, which is also known as the complementary accumulative distribution of the standard normal distribution. It is commonly used to represent the bit error rate of transmitted signals. The relationship between the
Q function and the error function (ERF) is:
Therefore, the
Q function can be used to express the bit error rate at the UAV receiver:
After analyzing the SER at the UAV, a system model of IRS–UAV–USER needs to be built in order to ensure a better signal at the USER terminal. As shown in
Figure 1, after the IRS receives the signal from the base station, it adjusts the signal phase amplitude and transmits the signal to the UAV terminal. The UAV, which acts as a base station for the cellular data network, sends the signals that it receives to the user, covering a roughly pyramidal area.
Due to signal attenuation, the distance between the UAV end and the USER end is limited. Therefore,
Figure 1 shows the area that can be covered by the UAV when all users can receive signals normally. We stipulate that the farthest distance of the signal received by the user is
d3 (beyond
d3, the signal received by the USER cannot be decoded correctly). The distance between the UAV and the point O directly below the ground is the height of the UAV. The circle with O as the center and r as the radius is the signal-receiving area. Users in the signal-receiving area can receive signals from the UAV normally. The angle included between the vertical line
and
d3 is
.
In this model, the signal loss from the UAV to the USER and the bit error rate at the USER end are calculated in the same way as those in the BS–IRS–UAV system model, and the specific formula is as follows:
where
is the path loss between the UAV and the USER, and
is the expression of the signal received by the USER.
3. Numerical Results
Through the calculation of the above formula, it can be concluded that the SER at the receiving end of the UAV model of the BS–IRS–UAV system is affected by many parameters, including the number of reflectors K, the distance d1 between the BS and the IRS, the distance d2 between the IRS and the UAV, and the distance d between the BS and the UAV. However, when the UAV reaches a certain height, the angle between the UAV and the BS is too large, which makes the signal that is directly transmitted from the base station to the UAV in the LoS link very weak. When digitally superimposed with the path attenuation power, the received power at the receiving end of the UAV is basically 0 (whether it is completely 0 depends on the flight altitude of the UAV). The received power of the LoS link is much smaller than that of the NLoS link. Therefore, in this section, all numerical results will be analyzed in order to demonstrate the system performance in terms of parameters other than the distance between the BS and UAV.
Table 1 gives the values of some constant parameters that will be used in the simulation test in the form of constant values in the simulation analysis.
Next, we analyze the influence of other variables on the receiving power of the UAV end.
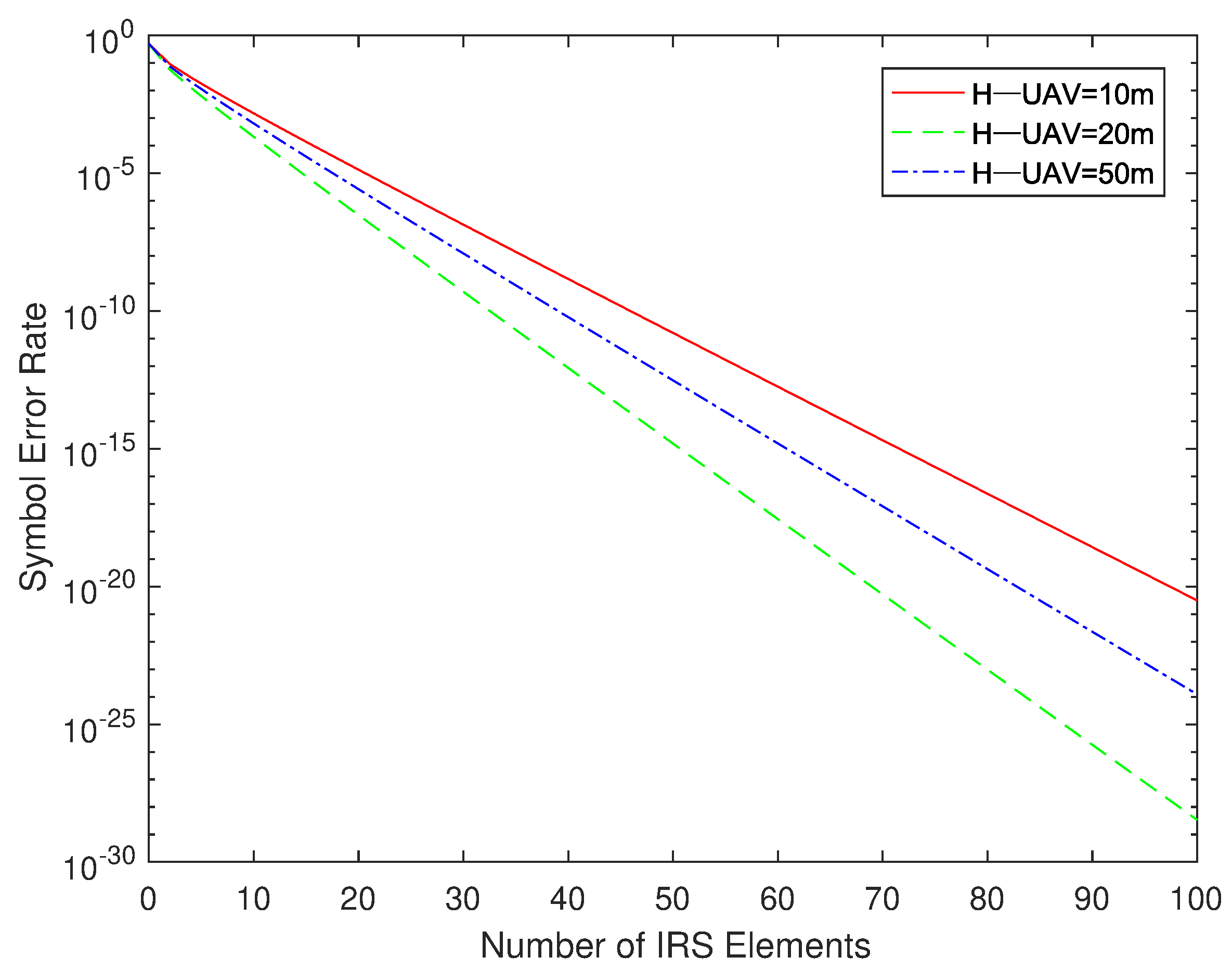
Figure 2 shows the influence of the number of reflective elements of the IRS on the SER of the signal received at the UAV end. The height of the UAV was set to 10, 20, and 50 m, respectively, and the relationships between the SER of the UAV’s received signal and the number of reflectors
K were compared at different heights.
It can be seen in
Figure 2 that the height of the UAV does not affect the linear relationship between the received signal’s SER at the receiving end and the number of elements
K. Selecting a height near the critical value as a reference, it is found that the SER of the received signal of the UAV at the height of 20 m is significantly better than those at the height of 10 and 50 m. When the number of reflective elements
K of the IRS gradually increases, the SER of the UAV’s received signals at different altitudes shows a downward trend. It can be seen that, when the number of reflective elements
K is set to 50, the SER at the receiving end has reached an ideal level.
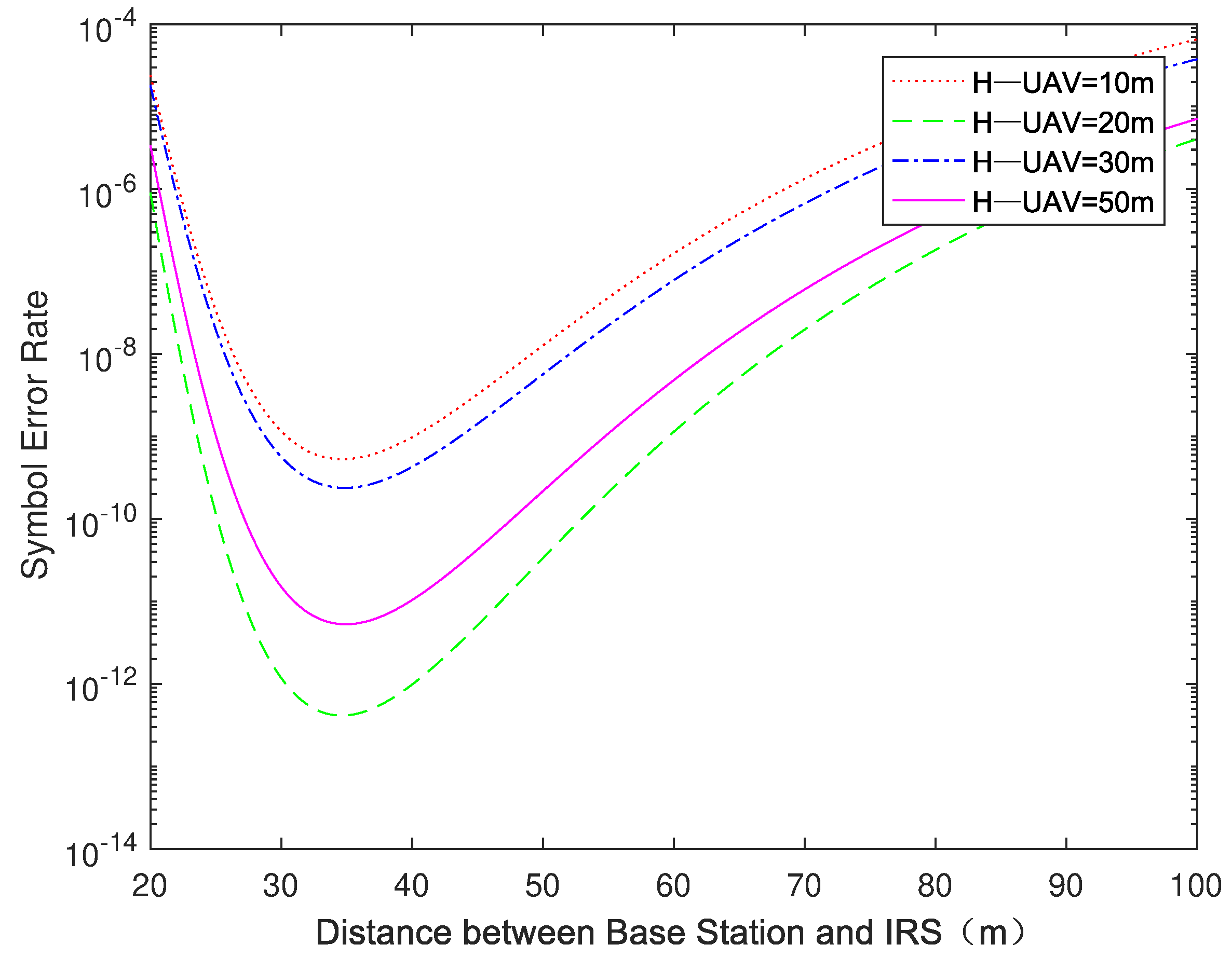
We fixed the number of IRS elements at 50, and then tested the linear relationship between the distance d1 (for the convenience of simulation, the values of the distances between all components of the IRS and the base station were equal by default, and are uniformly represented by d1 and d2) between the base station and the IRS and the SER. At the same time, we continued to add the UAV height as the third variable in the system simulation test.
Figure 3 shows the linear relationship between
d1 and the system SER at different UAV heights, and it shows the UAV heights under four conditions: 10, 20, 30, and 50 m. Four different heights were selected between the heights close to the critical point and those far from the critical point to verify the optimal value of
. As we can see in the figure, whether
is larger than 22.5 m or not does not affect the linear relationship between
d1 and the SER (first decreasing and then increasing). With the same
d1, the UAV with a height of 10 m receives the highest SER, and the UAV with a height of 20 m receives the lowest SER. The SERs of the signals received by UAVs at altitudes of 30 and 50 m are between 10 and 20 m, and the former is significantly higher than the latter. Although the performance of the UAV at 20 m is obviously better than that at other heights, considering the actual situation—a 20-m-high UAV cannot achieve a wider coverage range—we should make the best choice in the selection of the UAV height based on the combined benefits of the SER and coverage.
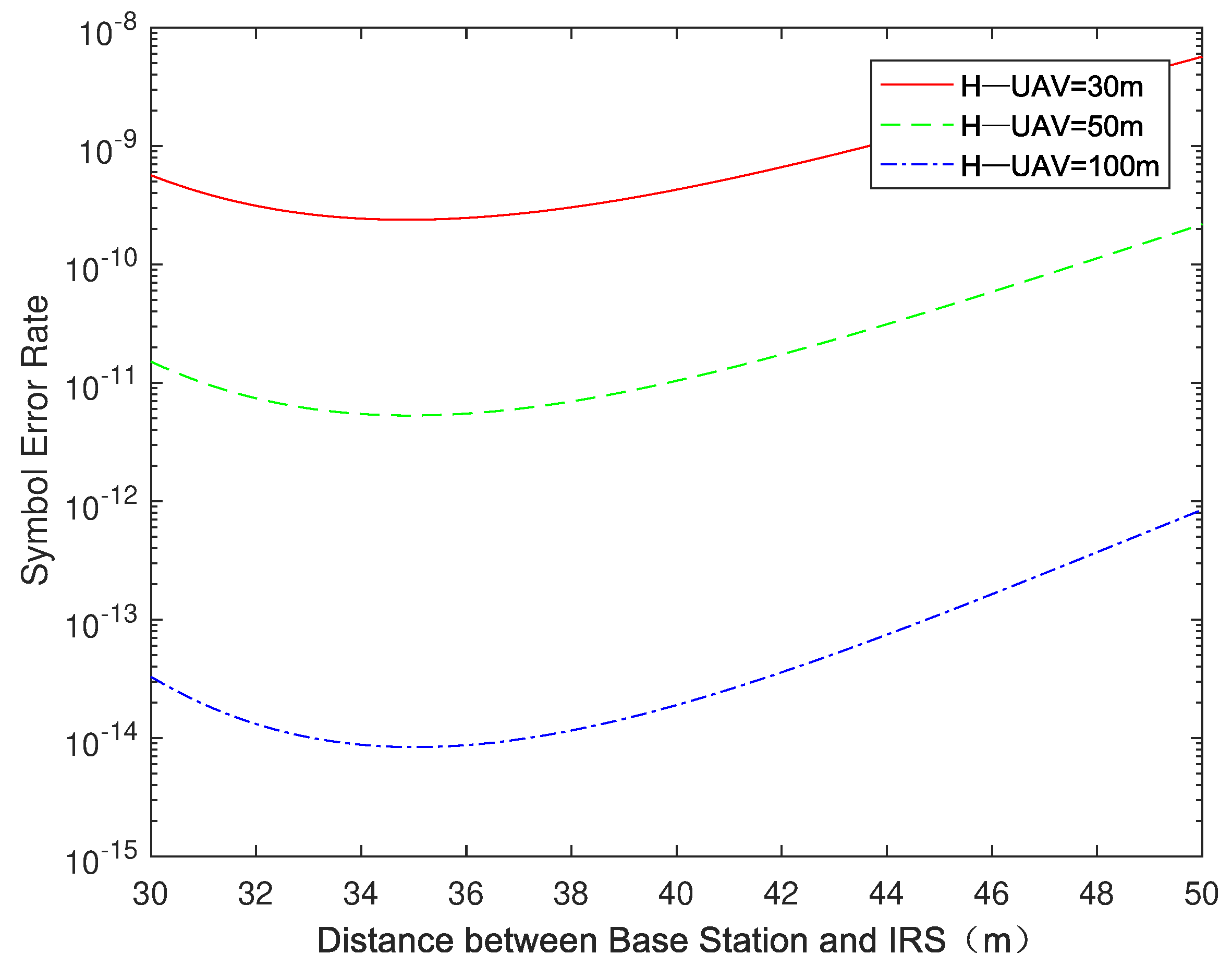
In
Figure 4, we reset
d2 from 50 to 100 m to increase the maximum altitude that the UAV can reach. At the same time, we narrowed the range of
d1 to 30–50 m and reset the values of
to 30, 50, and 100 m, respectively. One can see that, when
d2 is constant, the larger the height of UAV is, the lower the SER of the system will be. This conclusion applies to the communication system model in the low-altitude range higher than 22.5 m. After determining the accurate range of
d1 and conducting a comparison of specific values in the MATLAB simulation, it can be determined that when
d1 = 35 m, the system’s SER reaches the lowest value.
After the determination of the optimal distance of d1, the following simulation analysis will be conducted for the value of d2. All of the above simulations involved fixing d2 at a specific value at which could be flexibly changed (provided that d2 was greater than or equal to ). The simulation results show that the SER of the system always decreases with the increase in after the upper limit of d2 is set. Therefore, we will keep the value of d2 equal to that of —that is, the UAV is active directly over the IRS—to simulate the relationship between d2 and the SER.
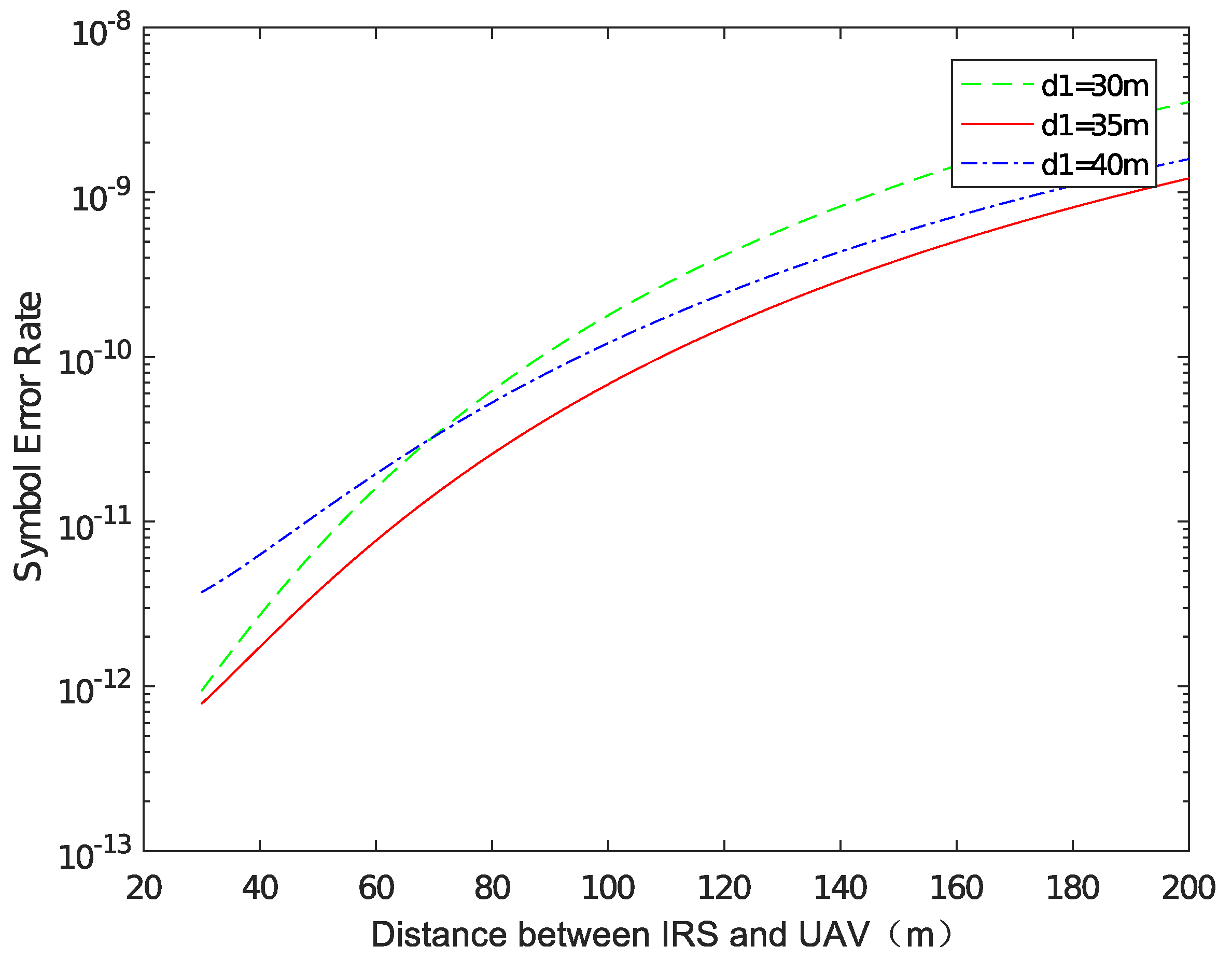
As shown in
Figure 5, at different values of
d1, the SER of the signals received by the UAV gradually increases as
d2 increases from 30 to 200 m. This is because an increase in
d2 does not affect the size of the signal received from the base station for some factors, but as
d2 increases, the path loss on the NLoS link increases, as does the SER of the signal received by the UAV. Therefore, in order to keep the SER of the signal obtained from the UAV as low as possible, it is necessary to ensure that
d2 is reduced as much as possible while other values are equal.
It can be seen from the above simulation that, with the same d2, when the value of is equal to that of d2, the SER of the signal received by the UAV is the lowest, and the simulation test of IRS–UAV–USER is continued under this condition.
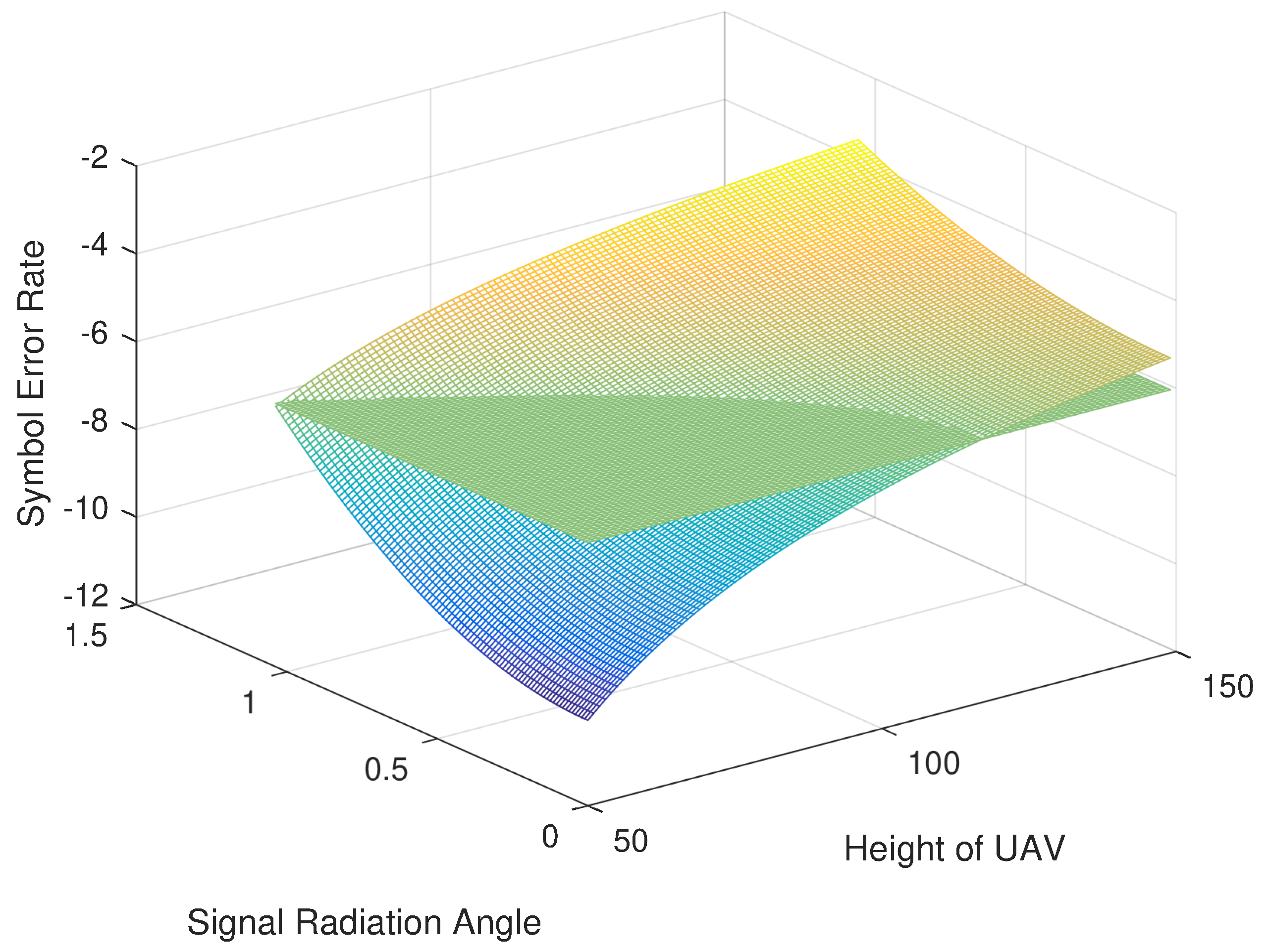
Given that is equal to d2 (the UAV moves directly above the IRS), the value of and the value of the included angle can be flexibly changed. By observing the SER of the signal received by the USER, the optimal deployment position of the UAV can be determined. Now, the height of the UAV and angle are taken as two independent variables affecting the USER’s SER. The SER expression for the USER is calculated by using Formulas (7)–(9) and (18)–(21). With the SER as the dependent variable, the joint three-dimensional image of the influence of and on the USER’s SER is drawn.
As shown in
Figure 6, the surface is a three-dimensional image of
,
, and the USER’s SER, the plane is the maximum SER acceptable to the USER for cellular data, and the value is set to
. The intersection of the plane and the surface is the boundary of where the user can receive a good signal. It can be seen in the figure that the SER of the signal received by the USER shows a monotonically increasing trend with either variable of
or
, that is, if one variable of
or
is fixed and the value of the other variable is changed, the SER always increases with the increase in this variable.
The coordinate points set at the intersection line represent the critical point for ensuring that the USER can receive good signals. In theory, all of the coordinate points of the UAV on the intersection line can achieve a good cellular data transmission effect. However, in order to achieve the maximum signal coverage area, we extracted coordinate points on the intersection line and performed function fitting in two-dimensional coordinates. The binomial expression obtained by fitting is:
where
,
, and
. In order to obtain a better signal transmission effect, it is necessary to improve the coverage area as much as possible on the premise of ensuring normal signal reception. It is known that the intersection of the plane, surface, and X-axis is 117, that is, the range of values of
is 0–117 m.
After specifying the height of the UAV and the range of variation in the radiation angle, we need to explore the relationship between the above two variables and the coverage area
S because the coverage area
S is directly related to the radius
R of the circle at the bottom of the cone, and
R can be expressed as:
Therefore, the expression of the coverage area
S is:
Therefore, the problem of finding the optimal deployment position of the UAV is transformed into the problem of finding the extreme value of Formula (26) under the condition of Formula (24). This is obtained by using the Lagrange multiplier method; when = 63 m, S achieves its maximum value, which is about 23,500 m .
4. Conclusions
This paper has illustrated a UAV-assisted cellular data network model based on an IRS and introduced the SER as the evaluation standard for signal quality. At the same time, we extended the original model to build a model for the optimal deployment position of the UAV. Through the derivation of the formula, we obtained the expression of the SER of the signal received at the UAV end and conducted a simulation analysis by changing various parameters in the original model. After determining the optimal value of each parameter, we also obtained the lowest SER of the signal received at the UAV end when the UAV is directly above the IRS. After that, the expression of the received signal and path loss formula at the UAV were used to derive the expression of the SER of signal received at the USER end in the model of the optimal UAV deployment position. Meanwhile, a simulation test of the optimal UAV deployment position was carried out. Finally, the optimal UAV deployment position was obtained through graphic simulation, determination of the intersection point, function fitting, and an extreme value operation. This not only ensures that the coverage users can get good signals, but also achieves the goal of maximizing coverage.
In real life, it is a feasible choice to use an IRS deployed in a building cluster and a UAV deployed at a low altitude as the transmission medium of a cellular data network. In terms of cost, this model will not cause excessive cost consumption when applied to real life. In terms of energy efficiency, the simulation results show that the model can achieve better signal transmission. In terms of feasibility, the deployment of an IRS in a building complex and the deployment of a UAV at a low altitude meet the needs of real life. If the practice proves that this model is suitable for real life, deploying a network in a city with numerous and dense buildings will have a very significant effect.
Future research can also be carried out on the probability of interruption of signal transmission and the received power of the signal terminal in order to optimize and improve the relevant model. As an efficient communication system model, UAV-assisted cellular data relay communication based on an IRS is expected to provide users with more efficient and convenient services.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}