
Efficient Iterative Regularization Method for Total Variation-Based Image Restoration

Abstract
:1. Introduction
- By constructing a pseudoinverse matrix, an equivalent seminorm fidelity term is imposed on TV-based image restoration problem (3). This improvement can eliminate the negative effect caused by the null space of H;
- An efficient minimization scheme under the split Bregman framework is proposed to solve the improved objective function;
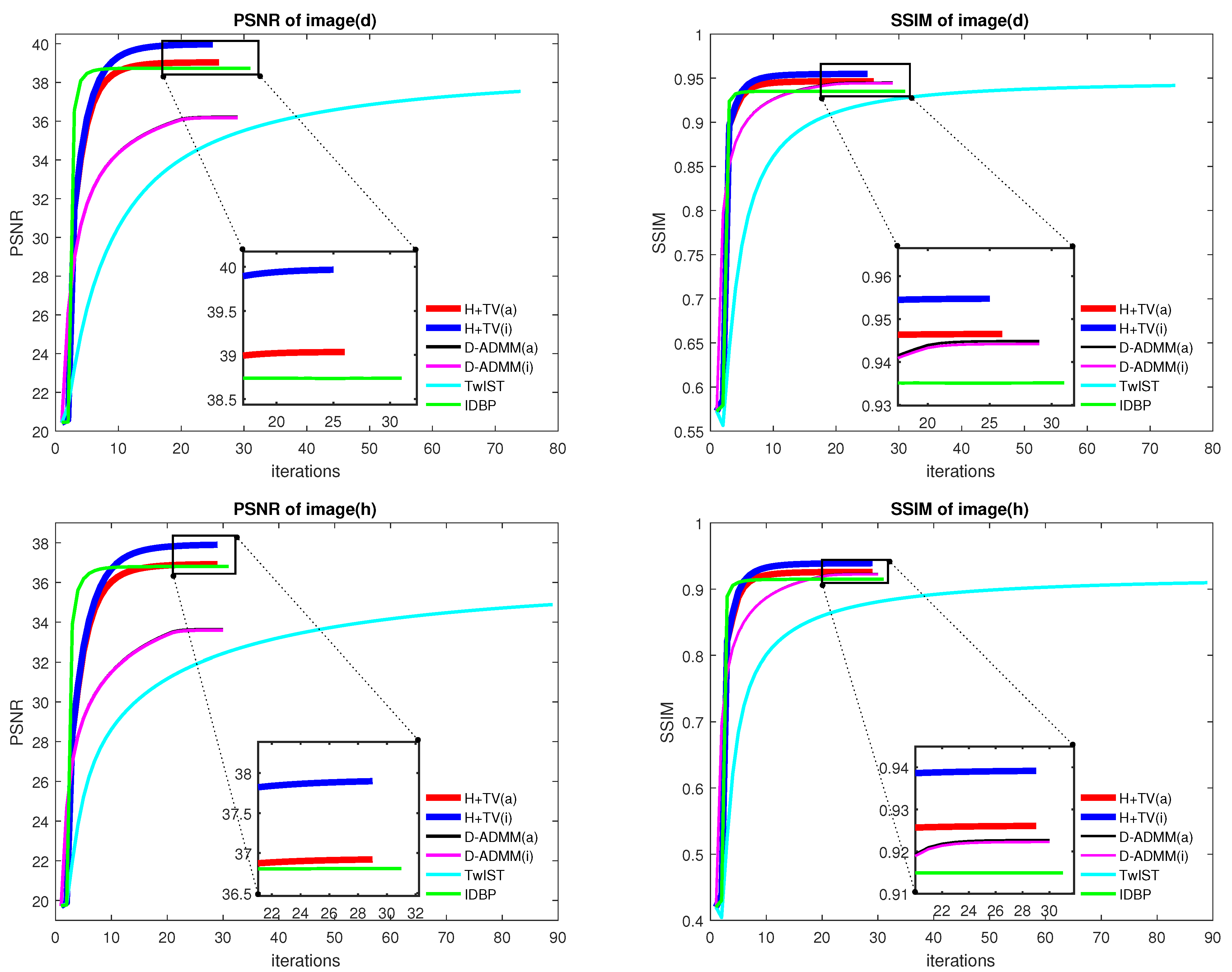
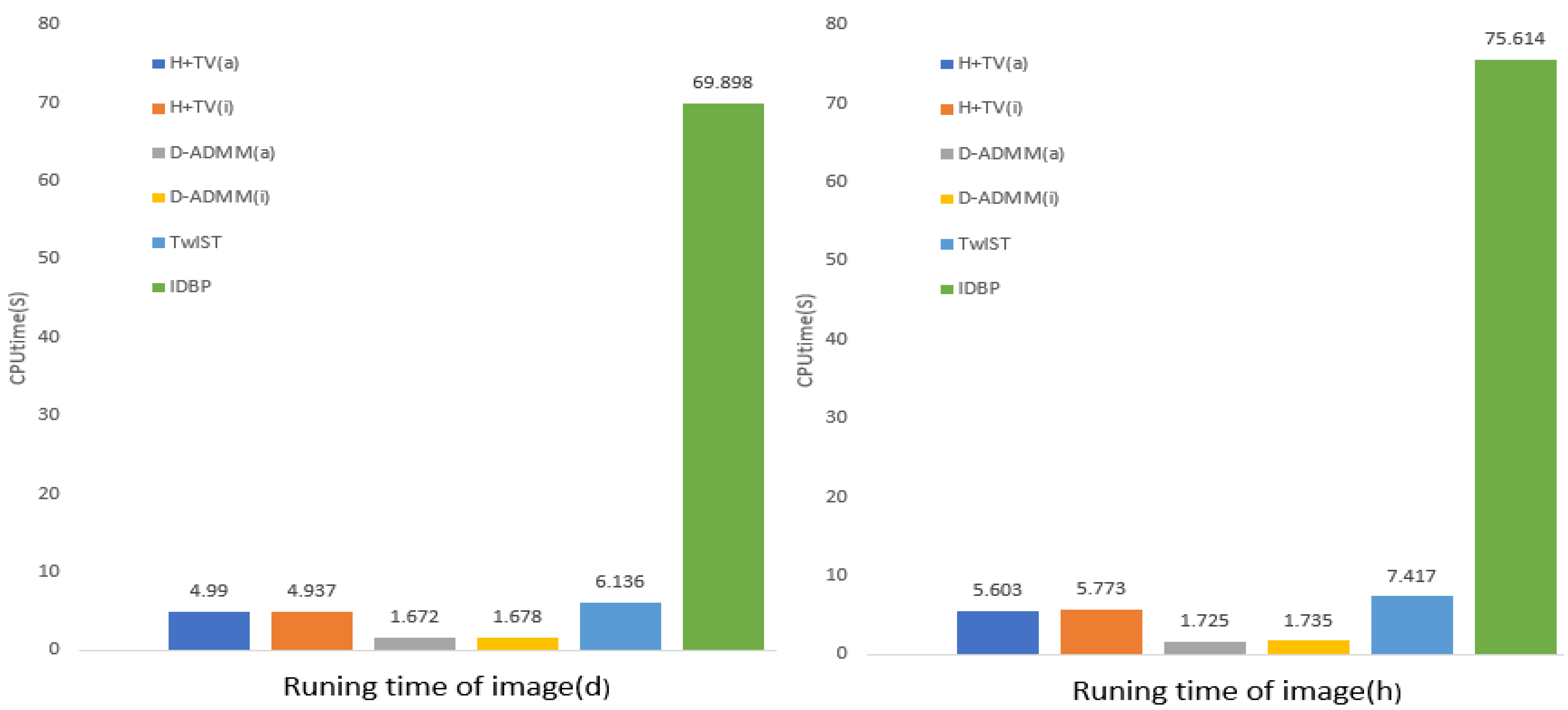
- Numerical experiments compared with the competitive methods show that the proposed method can obtain better restoration results and computational efficiency.
2. Related Work
3. The Proposed Algorithm
| Algorithm 1 Anisotropic |
|
| Algorithm 2 Isotropic |
|
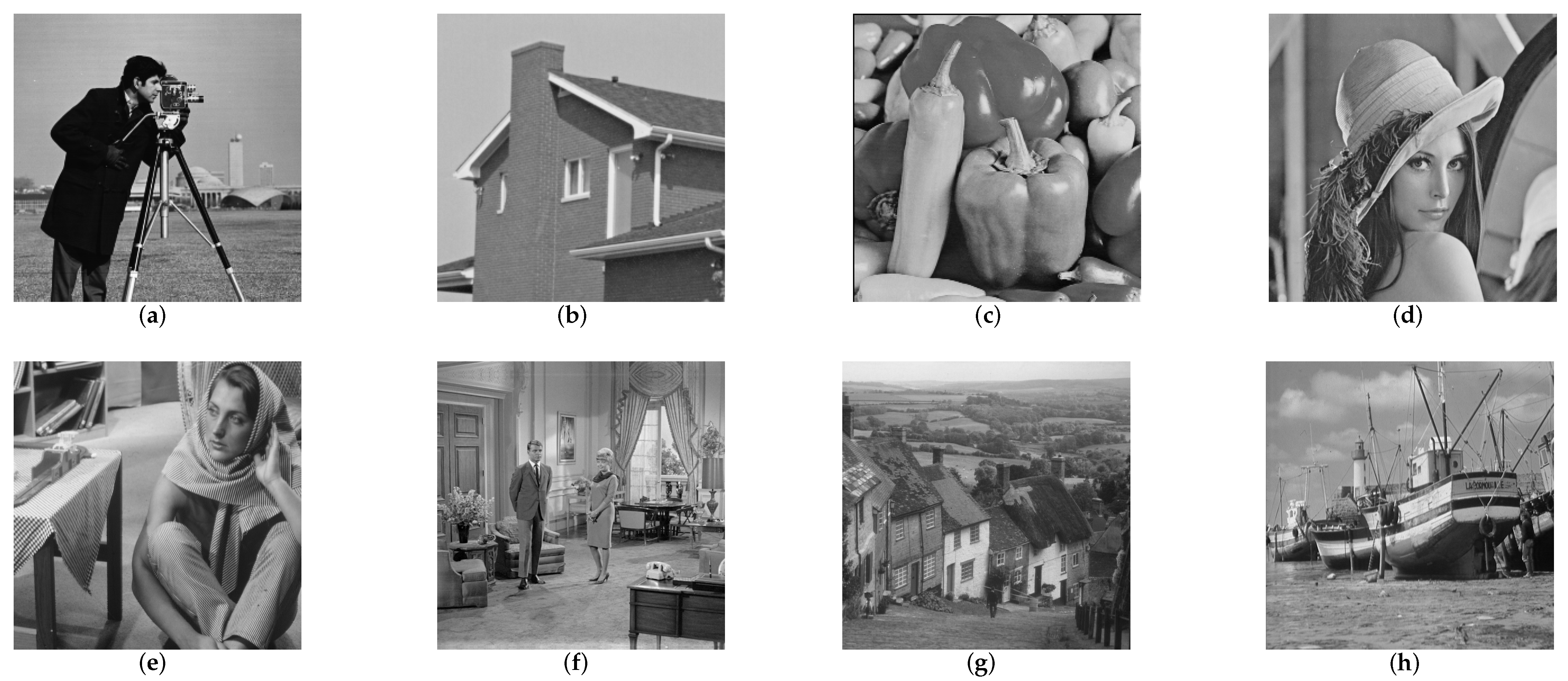
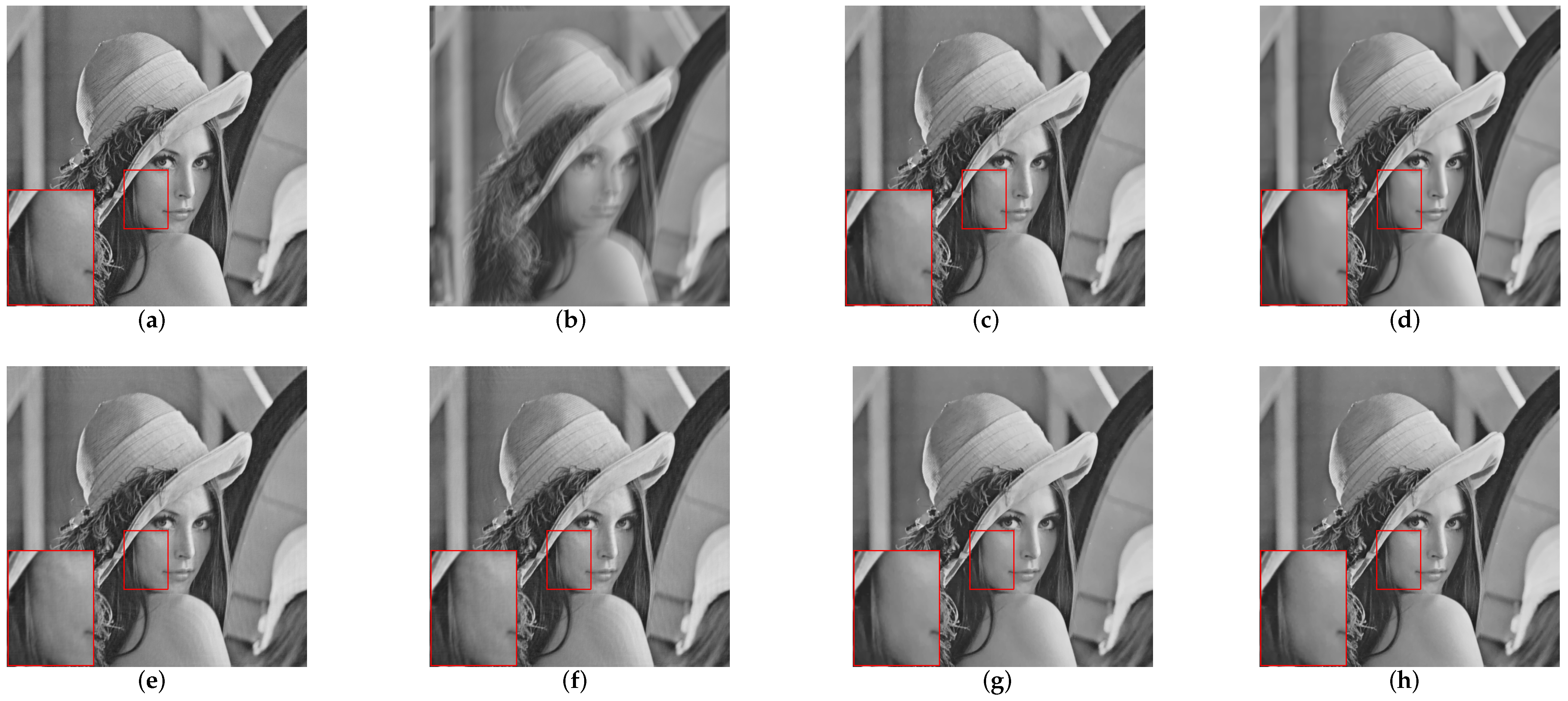
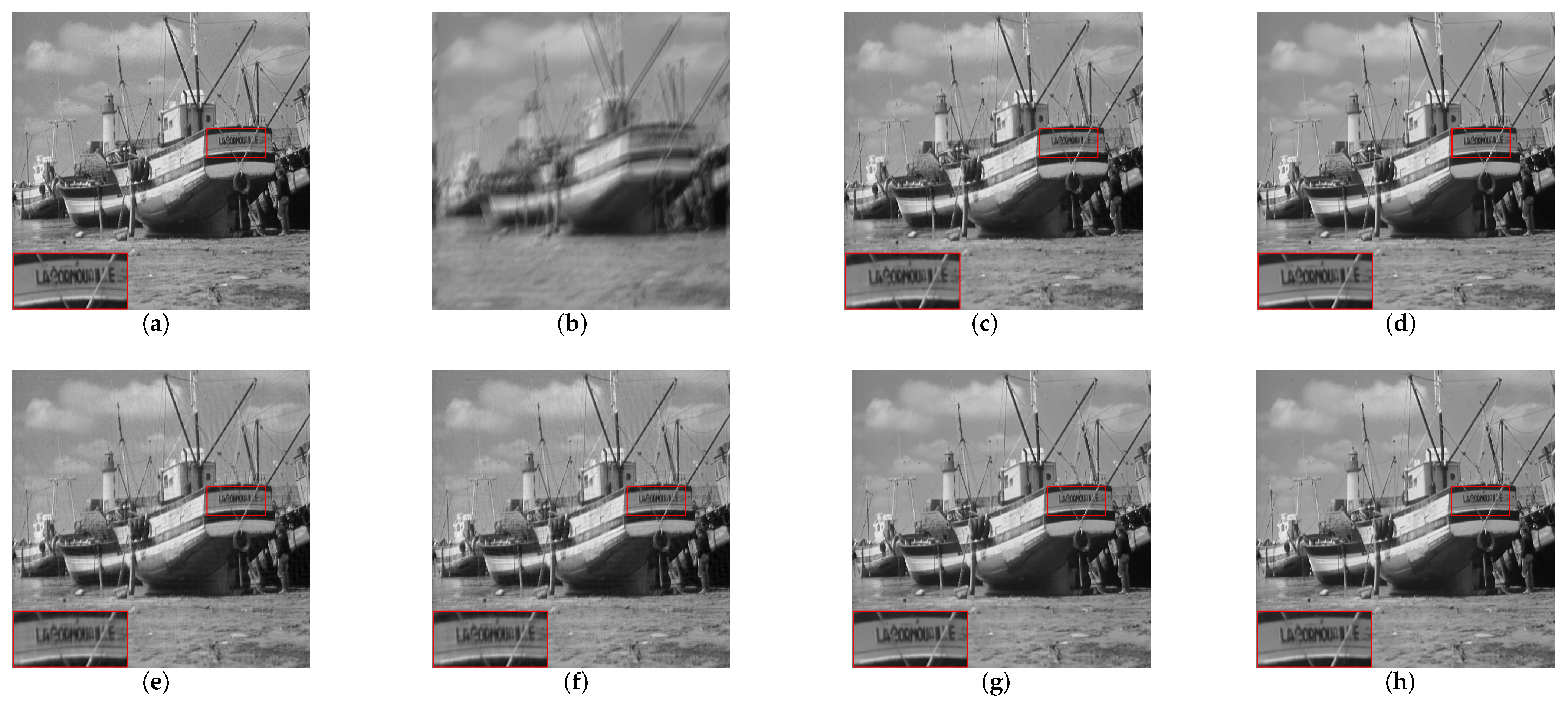
4. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Banham, M.R.; Katsaggelos, A.K. Katsaggelos Digital Image Restoration. IEEE Signal Process. Mag. 1997, 14, 24–41. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.Y. Solutions of Ill-Posed Problems. Math. Comput. 1978, 32, 1320–1322. [Google Scholar]
- Chen, S.S. Atomic Decomposition by Basis Pursuit. SIAM Rev. 2001, 43, 129–159. [Google Scholar] [CrossRef] [Green Version]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear Total Variation Based Noise Removal Algorithms. Phys. D Nonlinear Phenom. 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Ren, D.; Zhang, H.; Zhang, D.; Zuo, W. Fast Total-Variation Based Image Restoration Based on Derivative Alternated Direction Optimization Methods. Neurocomputing 2015, 170, 201–212. [Google Scholar] [CrossRef]
- Tirer, T.; Giryes, R. Image Restoration by Iterative Denoising and Backward Projections. IEEE Trans. Image Process. 2018, 28, 1220–1234. [Google Scholar] [CrossRef]
- Daubechies, I.; Defrise, M. An Iterative Thresholding Algorithm for Linear Inverse Problems with a Sparsity Constraint. Commun. Pure Appl. Math. A J. Issued Courant Inst. Math. Sci. 2004, 57, 1413–1457. [Google Scholar] [CrossRef] [Green Version]
- Elad, M. Why Simple Shrinkage Is Still Relevant for Redundant Representations? IEEE Trans. Inform. 2006, 52, 5559–5569. [Google Scholar] [CrossRef]
- Elad, M.; Matalon, B.; Zibulevsky, M. Image Denoising with Shrinkage and Redundant Representations. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), New York, NY, USA, 22 June 2006; pp. 1924–1931. [Google Scholar]
- Starck, J.L.; Donoho, D.L.; Candès, E.J. Astronomical Image Representation by the Curvelet Transform. A&A 2003, 398, 785–800. [Google Scholar]
- Starck, J.L.; Nguyen, M.K.; Murtagh, F. Wavelets and Curvelets for Image Deconvolution: A Combined Approach. Signal Process. 2003, 83, 2279–2283. [Google Scholar] [CrossRef]
- Figueiredo, M.A.T.; Nowak, R.D.; Wright, S.J. Gradient Projection for Sparse Reconstruction: Application to Compressed Sensing and Other Inverse Problems. IEEE J. Sel. Top. Signal Process. 2007, 1, 586–597. [Google Scholar] [CrossRef] [Green Version]
- Bioucas-Dias, J.M.; Figueiredo, M.A.T. A New TwIST: Two-Step Iterative Shrinkage/Thresholding Algorithms for Image Restoration. IEEE Trans. Image Process. 2007, 16, 2992–3004. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beck, A.; Teboulle, M. A Fast Iterative Shrinkage-Thresholding Algorithm for Linear Inverse Problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef] [Green Version]
- Ma, G.; Hu, Y.; Gao, H. An Accelerated Momentum Based Gradient Projection Method for Image Deblurring. In Proceedings of the 2015 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Ningbo, China, 19–22 September 2015; pp. 1–4. [Google Scholar]
- Afonso, M.V.; Bioucas-Dias, J.M.; Figueiredo, M.A.T. Fast Image Recovery Using Variable Splitting and Constrained Optimization. IEEE Trans. Image Process. 2010, 19, 2345–2356. [Google Scholar] [CrossRef] [Green Version]
- Afonso, M.V.; Bioucas-Dias, J.M.; Figueiredo, M.A.T. An Augmented Lagrangian Approach to the Constrained Optimization Formulation of Imaging Inverse Problems. IEEE Trans. Image Process. 2011, 20, 681–695. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Osher, S.; Burger, M.; Goldfarb, D.; Xu, J.; Yin, W. An Iterative Regularization Method for Total Variation-Based Image Restoration. Multiscale Model. Simul. 2005, 4, 460–498. [Google Scholar] [CrossRef]
- Yin, W.; Osher, S.; Goldfarb, D.; Darbon, J. Bregman Iterative Algorithms for l1-Minimization with Applications to Compressed Sensing. SIAM J. Imaging Sci. 2008, 1, 143–168. [Google Scholar] [CrossRef] [Green Version]
- Goldstein, T.; Osher, S. The Split Bregman Method for L1-Regularized Problems. SIAM J. Imaging Sci. 2009, 2, 323–343. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J.-M. A Non-Local Algorithm for Image Denoising. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), San Diego, CA, USA, 20–26 June 2005; pp. 60–65. [Google Scholar]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image Denoising by Sparse 3-D Transform-Domain Collaborative Filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef]
- Tomasi, C.; Manduchi, R. Bilateral Filtering for Gray and Color Images. In Proceedings of the Sixth International Conference on Computer Vision (ICCV), Narosa Publishing House, Bombay, India, 4–7 January 1998; pp. 839–846. [Google Scholar]
- Khan, A.; Jin, W.; Haider, A.; Rahman, M.; Wang, D. Adversarial Gaussian Denoiser for Multiple-Level Image Denoising. Sensors 2021, 261, 2998. [Google Scholar] [CrossRef]
- Yang, C.; Huang, D.; He, W.; Cheng, L. Neural Control of Robot Manipulators With Trajectory Tracking Constraints and Input Saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4231–4242. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Chen, C.; He, W.; Cui, R.; Li, Z. Robot Learning System Based on Adaptive Neural Control and Dynamic Movement Primitives. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 777–787. [Google Scholar] [CrossRef]
- Burger, H.C.; Schuler, C.J.; Harmeling, S. Image Denoising: Can Plain Neural Networks Compete with BM3D? In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition(CVPR), Providence, RI, USA, 16–21 June 2012; pp. 2392–2399. [Google Scholar]
- Wang, Y.; Song, X.; Gong, G.; Li, N. A Multi-Scale Feature Extraction-Based Normalized Attention Neural Network for Image Denoising. Electronics 2021, 10, 319. [Google Scholar] [CrossRef]
- Shao, L.; Zhang, E.; Li, M. An Efficient Convolutional Neural Network Model Combined with Attention Mechanism for Inverse Halftoning. Electronics 2021, 10, 1574. [Google Scholar] [CrossRef]
- Cho, S.I.; Park, J.H.; Kang, S.-J. A Generative Adversarial Network-Based Image Denoiser Controlling Heterogeneous Losses. Sensors 2021, 21, 1191. [Google Scholar] [CrossRef] [PubMed]
- Beck, A.; Teboulle, M. Fast Gradient-Based Algorithms for Constrained Total Variation Image Denoising and Deblurring Problems. IEEE Trans. Image Process. 2009, 18, 2419–2434. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zuo, W.; Lin, Z. A Generalized Accelerated Proximal Gradient Approach for Total-Variation-Based Image Restoration. IEEE Trans. Image Process. 2011, 20, 2748–2759. [Google Scholar] [CrossRef]
- Levin, A.; Weiss, Y.; Durand, F.; Freeman, W.T. Understanding and evaluating blind deconvolution algorithms. In Proceedings of the 2009 IEEE Conference Computer Vision and Pattern Recognition (CVPR), Miami, FL, USA, 20–25 June 2009; pp. 1964–1971. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | (a) | (i) | D-ADMM (a) | D-ADMM (i) | TwIST | IDBP |
|---|---|---|---|---|---|---|
| Cameraman | 37.87 | 39.01 | 30.75 | 30.70 | 35.33 | 39.10 |
| House | 38.80 | 39.71 | 34.76 | 34.65 | 37.30 | 39.56 |
| Peppers | 38.98 | 39.90 | 32.56 | 32.48 | 36.50 | 38.42 |
| Lena | 39.03 | 39.97 | 36.21 | 36.18 | 37.54 | 38.74 |
| Barbara | 35.67 | 37.03 | 29.56 | 29.56 | 31.36 | 39.12 |
| Boat | 36.92 | 37.90 | 33.63 | 33.60 | 34.89 | 36.81 |
| Hill | 36.90 | 37.96 | 34.66 | 34.64 | 34.75 | 36.49 |
| Couple | 37.32 | 38.25 | 34.53 | 33.47 | 34.31 | 37.49 |
| Method | (a) | (i) | D-ADMM (a) | D-ADMM (i) | TwIST | IDBP |
|---|---|---|---|---|---|---|
| Cameraman | 0.957 | 0.964 | 0.896 | 0.893 | 0.942 | 0.956 |
| House | 0.934 | 0.946 | 0.916 | 0.913 | 0.923 | 0.946 |
| Peppers | 0.963 | 0.968 | 0.913 | 0.911 | 0.952 | 0.951 |
| Lena | 0.946 | 0.954 | 0.944 | 0.944 | 0.944 | 0.935 |
| Barbara | 0.951 | 0.961 | 0.893 | 0.892 | 0.915 | 0.960 |
| Boat | 0.926 | 0.939 | 0.922 | 0.922 | 0.909 | 0.914 |
| Hill | 0.933 | 0.947 | 0.921 | 0.920 | 0.908 | 0.922 |
| Couple | 0.944 | 0.954 | 0.929 | 0.928 | 0.921 | 0.937 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, G.; Yan, Z.; Li, Z.; Zhao, Z. Efficient Iterative Regularization Method for Total Variation-Based Image Restoration. Electronics 2022, 11, 258. https://doi.org/10.3390/electronics11020258
Ma G, Yan Z, Li Z, Zhao Z. Efficient Iterative Regularization Method for Total Variation-Based Image Restoration. Electronics. 2022; 11(2):258. https://doi.org/10.3390/electronics11020258
Chicago/Turabian StyleMa, Ge, Ziwei Yan, Zhifu Li, and Zhijia Zhao. 2022. "Efficient Iterative Regularization Method for Total Variation-Based Image Restoration" Electronics 11, no. 2: 258. https://doi.org/10.3390/electronics11020258