


Deterministic Brownian-like Motion: Electronic Approach

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Model
- is independent to x.
- fluctuates extremely fast compared to the fluctuations of the particle position.
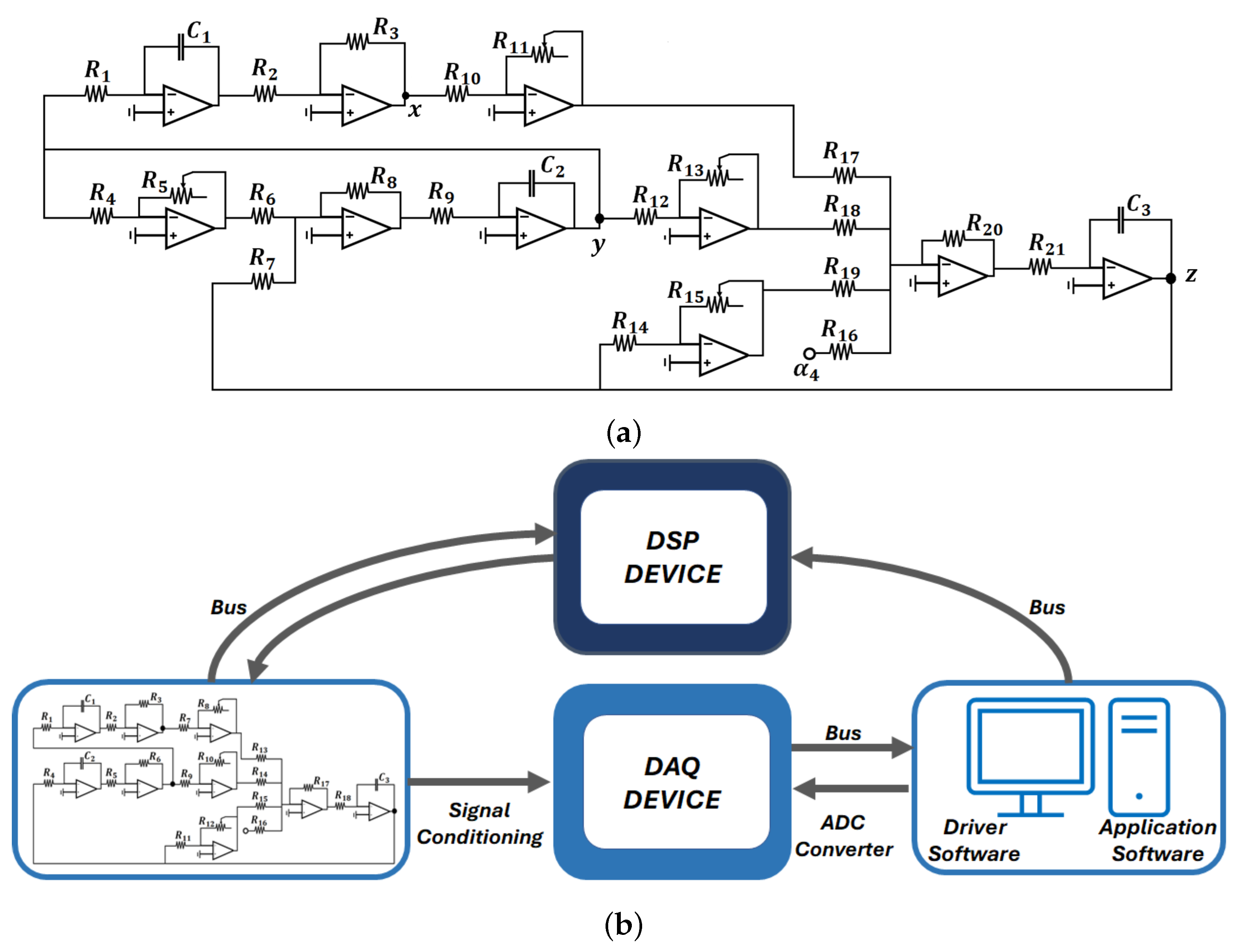
2.2. Electronic Implementation
2.3. Statistical Metrics
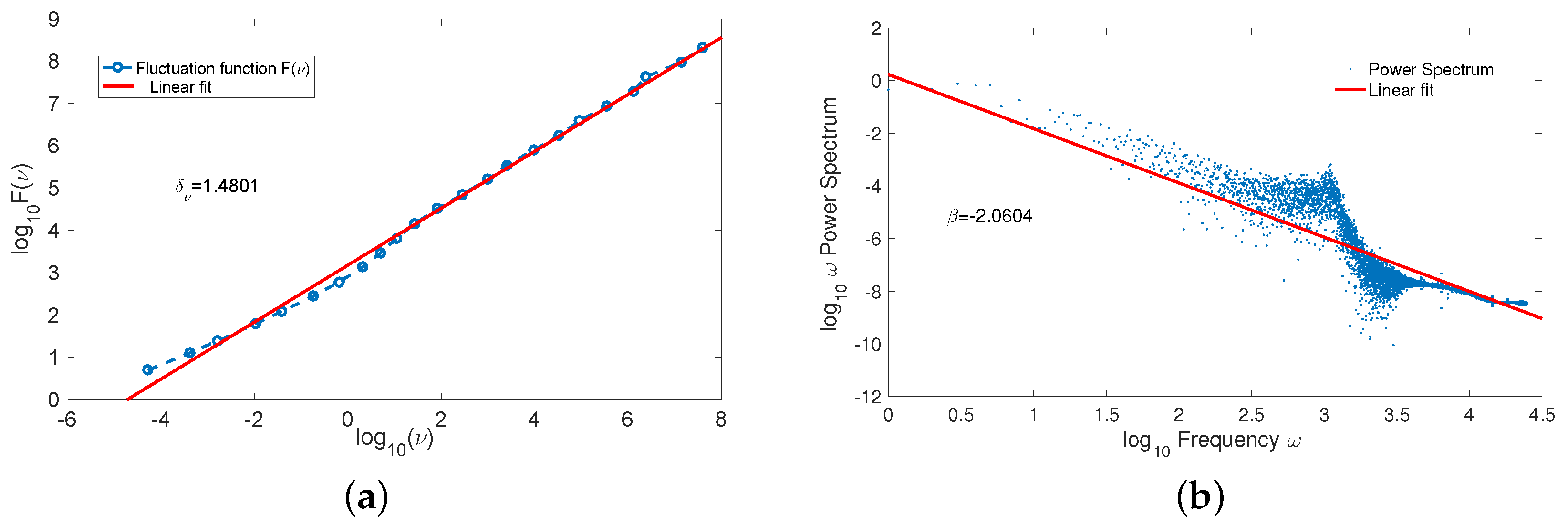
2.3.1. Detrendred Fluctuation Analysis
- When , the time series is said to be uncorrelated, white noise.
- When , the time series is anti-correlated.
- If , there are extensive positive correlations in the series under study.
- If , the signal corresponds to a -type process, pink noise.
- If , the signal shows a Brownian-like behavior, brown noise.
2.3.2. Power Law in the Power Spectrum
2.3.3. Mean Square Displacement
2.3.4. Normal Probability Distribution
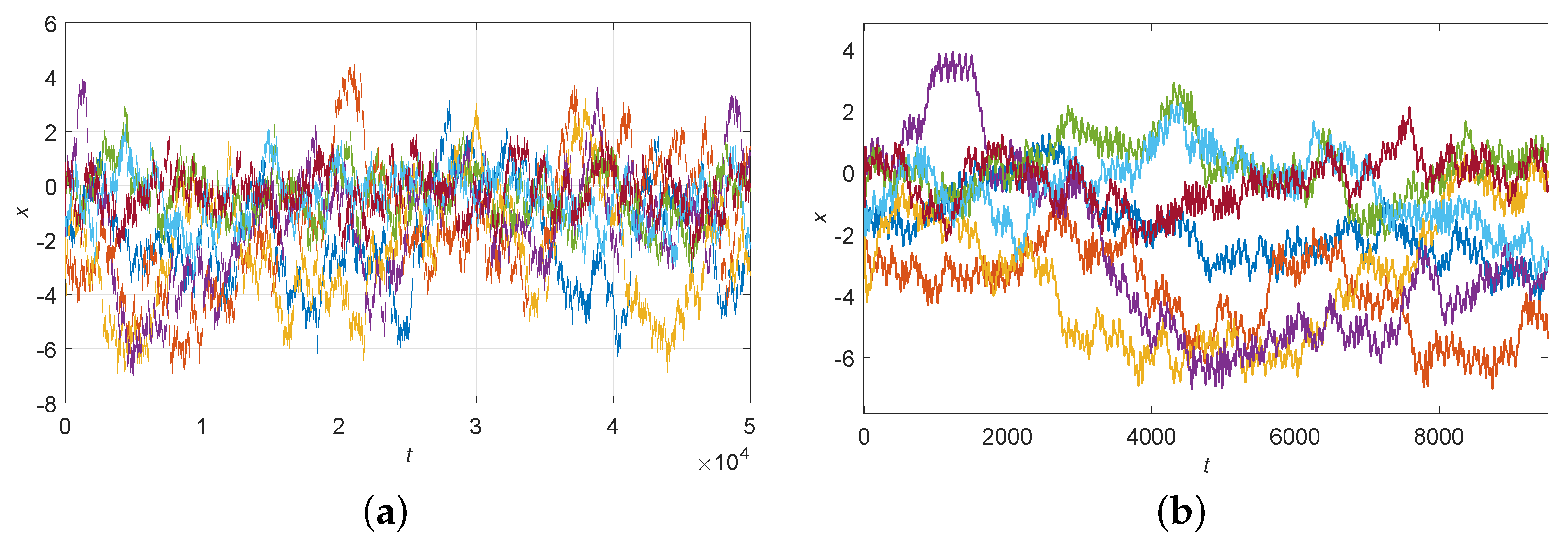
3. Results
4. Discussion
- 1.
- DFA;
- 2.
- Power law in the frequency spectrum;
- 3.
- Normal probability distribution;
- 4.
- Mean Square Displacement.
5. Conclusions
- It is the first electronic implementation that generates Brownian motion in a deterministic way, based on a set of differential equations based on the Langevin equation, i.e., the model takes into account the information of the particles and the surrounding medium.
- The elimination of the stochastic component enables the reproducibility of the results.
- The validation of Brownian-like motion in electronic circuits opens the possibility of using this circuit as seed for applications in the field of medicine, ecology, to name a few.
Author Contributions
Funding
Conflicts of Interest
Appendix A. Explored Values Combinations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
References
- Osborne, M.F. Brownian motion in the stock market. Oper. Res. 1959, 7, 145–173. [Google Scholar] [CrossRef]
- Ermogenous, A. Brownian Motion and Its Applications in the Stock Market; University of Dayton: Dayton, OH, USA, 2006. [Google Scholar]
- Lima, M.A.F.; Fernández Ramírez, L.M.; Carvalho, P.; Batista, J.G.; Freitas, D.M. A comparison between deep learning and support vector regression techniques applied to solar forecast in Spain. J. Sol. Energy Eng. 2022, 144, 010802. [Google Scholar] [CrossRef]
- Xiao, D.; Chen, H.; Wei, C.; Bai, X. Statistical Measure for Risk-Seeking Stochastic Wind Power Offering Strategies in Electricity Markets. J. Mod. Power Syst. Clean Energy 2021. to be published. [Google Scholar] [CrossRef]
- Toral, R. Últimos Avances en el Movimiento Browniano: Orden a Partir del Desorden, Cien años de Herencia Einsteiniana; Instituto Mediterráneo de Estudios Avanzados (IMEDEA); CSIC-Universitat de les Illes Balears: Palma de Mallorca, Spain, 2008. [Google Scholar]
- Brown, R. A Brief Account of Microscopical Observations Made... on the Particles Contained in the Pollen of Plants, and on the General Existence of Active Molecules in Organic and Inorganic Bodies; Cambridge University Press: Cambridge, UK, 1828. [Google Scholar]
- Einstein, A. Investigations on the Theory of the Brownian Movement; Courier Corporation: Chelmsford, MA, USA, 1956. [Google Scholar]
- Langevin, P. Sur la théorie du mouvement brownien. CR Acad. Sci. Paris 1908, 146, 530. [Google Scholar]
- Perrin, J. Discontinuous Structure of Matter; Nobel Lecture Nobel.Price.org; 1926. Available online: https://www.nobelprize.org/prizes/physics/1926/perrin/lecture/ (accessed on 15 July 2017).
- Smoluchowski, M. Investigation into a Mathematical Theory of the Kinetics of Coagulation of Colloidal Solutions; Army Biological Labs: Frederick, MD, USA, 1967. [Google Scholar]
- Fokker, A.D. Over Browns’che Bewegingen in Het Stralingsveld. Ph.D. Thesis, Physics and Mathematics Faculty, University of Leiden, Leiden, The Netherlands, 1913. [Google Scholar]
- Planck, M. Vorlesungen uber Thermodynamik; De Gruyter: Berlin, Germany, 1927. [Google Scholar]
- Ornstein, L. On the Brownian motion. In Proceedings, 21 I; KNAW: Amsterdam, The Netherlands, 1919; Volume 21, pp. 96–108. [Google Scholar]
- Burger, H. Over de theorie der Brown’sche beweging. Versl. Kon. Ak 1917, 25, 1482. [Google Scholar]
- Ren, Y.; Yin, W.; Sakthivel, R. Stabilization of stochastic differential equations driven by G-Brownian motion with feedback control based on discrete-time state observation. Automatica 2018, 95, 146–151. [Google Scholar] [CrossRef]
- Yang, H.; Ren, Y.; Lu, W. Stabilisation of stochastic differential equations driven by G-Brownian motion via aperiodically intermittent control. Int. J. Control 2020, 93, 565–574. [Google Scholar] [CrossRef]
- Duan, P. Stabilization of stochastic differential equations driven by G-Brownian motion with aperiodically intermittent control. Mathematics 2021, 9, 988. [Google Scholar] [CrossRef]
- Van Hove, L. Quantum-mechanical perturbations giving rise to a statistical transport equation. Physica 1954, 21, 517–540. [Google Scholar] [CrossRef]
- Zwanzig, R. Lectures in Theoretical Physics; Brittin, W.E., Downs, B.W., Downs, J., Eds.; Interscience: New York, NY, USA, 1961; Volume 3, p. 106. [Google Scholar]
- Grigolini, P.; Rocco, A.; West, B.J. Fractional calculus as a macroscopic manifestation of randomness. Phys. Rev. E 1999, 59, 2603. [Google Scholar] [CrossRef]
- West, B.J.; Grigolini, P.; Metzler, R.; Nonnenmacher, T.F. Fractional diffusion and Lévy stable processes. Phys. Rev. E 1997, 55, 99. [Google Scholar] [CrossRef]
- Dettmann, C.P.; Cohen, E.; Van Beijeren, H. Statistical mechanics: Microscopic chaos from brownian motion? Nature 1999, 401, 875. [Google Scholar] [CrossRef] [Green Version]
- Trefán, G.; Grigolini, P.; West, B.J. Deterministic brownian motion. Phys. Rev. A 1992, 45, 1249. [Google Scholar] [CrossRef] [PubMed]
- Huerta-Cuellar, G.; Jimenez-Lopez, E.; Campos-Cantón, E.; Pisarchik, A. An approach to generate deterministic Brownian motion. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2740–2746. [Google Scholar] [CrossRef]
- Gilardi-Velázquez, H.E.; Campos-Cantón, E. Nonclassical point of view of the Brownian motion generation via fractional deterministic model. Int. J. Mod. Phys. C 2018, 29, 1850020. [Google Scholar] [CrossRef]
- Prada, D.; Herrera-Jaramillo, Y.; Ortega, J.; Gómez, J. Fractional Brownian motion and Hurst coefficient in drinking water turbidity analysis. J. Phys. Conf. Ser. 2020, 1645, 012004. [Google Scholar] [CrossRef]
- Herrera, Y.; Prada, D.; Ortega, J.; Sierra, A.; Acevedo, A. Physical applications: Fractional Brownian movement applied to the particle dispersion. J. Phys. Conf. Ser. 2020, 1702, 012004. [Google Scholar] [CrossRef]
- Prada, D.; Acevedo, A.; Fernandez, H.; Prada, S.; Gómez, J. Physical applications: Analysis of Colombian coffee prices using fractional Brownian motion. J. Phys. Conf. Ser. 2020, 1645, 012002. [Google Scholar] [CrossRef]
- Rahman, Z.A.S.; Jasim, B.H.; Al-Yasir, Y.I.; Abd-Alhameed, R.A.; Alhasnawi, B.N. A new no equilibrium fractional order chaotic system, dynamical investigation, synchronization, and its digital implementation. Inventions 2021, 6, 49. [Google Scholar] [CrossRef]
- Balcerek, M.; Burnecki, K. Testing of multifractional Brownian motion. Entropy 2020, 22, 1403. [Google Scholar] [CrossRef]
- Yang, Y.; Zhu, H.; Lai, D. Estimating Conditional Power for Sequential Monitoring of Covariate Adaptive Randomized Designs: The Fractional Brownian Motion Approach. Fractal Fract. 2021, 5, 114. [Google Scholar] [CrossRef]
- Martín-Pasquín, F.J.; Pisarchik, A.N. Brownian Behavior in Coupled Chaotic Oscillators. Mathematics 2021, 9, 2503. [Google Scholar] [CrossRef]
- Armijo, J. Absorción, distribución y eliminación de los fármacos. In Farmacología Humana; Masson, SA: Barcelona, Spain, 1997; pp. 47–72. [Google Scholar]
- del Carmen Avendaño-López, M. La paradoja farmacéutica: Anticancerosos basados en la hipoxia celular. Inhibidores PARP. In The Anales de la Real Sociedad Española de Química; Number 4; Real Sociedad Española de Química: Madrid, Spain, 2012; pp. 290–297. [Google Scholar]
- Dagdug, L.; Berezhkovskii, A.M.; Shvartsman, S.Y.; Weiss, G.H. Equilibration in two chambers connected by a capillary. J. Chem. Phys. 2003, 119, 12473–12478. [Google Scholar] [CrossRef]
- Gibaldi, M.; Lee, M.; Desai, A. Gibaldi’s Drug Delivery Systems in Pharmaceutical Care; ASHP: Bethesda, MD, USA, 2007. [Google Scholar]
- Stokes, G.G. On the Effect of the Internal Friction of Fluids on the Motion of Pendulums; Pitt Press: Pittsburgh, PA, USA, 1851; Volume 9. [Google Scholar]
- Štefan Porubský. Integer Rounding Functions. Available online: https://www.cs.cas.cz/portal/AlgoMath/NumberTheory/ArithmeticFunctions/IntegerRoundingFunctions.htm (accessed on 20 January 2016).
- Lu, J.; Chen, G.; Yu, X.; Leung, H. Design and analysis of multiscroll chaotic attractors from saturated function series. IEEE Trans. Circuits Syst. I Regul. Pap. 2004, 51, 2476–2490. [Google Scholar] [CrossRef]
- Gilardi-Velázquez, H.; Ontañón-García, L.; Hurtado-Rodriguez, D.; Campos-Cantón, E. Multistability in Piecewise Linear Systems by Means of the Eigenspectra Variation and the Round Function. arXiv 2016, arXiv:1611.03461. [Google Scholar]
- Gilardi-Velázquez, H.; Ontañón-García, L.; Hurtado-Rodriguez, D.; Campos-Cantón, E. Multistability in piecewise linear systems versus eigenspectra variation and round function. Int. J. Bifurc. Chaos 2017, 27, 1730031. [Google Scholar] [CrossRef]
- Anzo-Hernández, A.; Gilardi-Velázquez, H.E.; Campos-Cantón, E. On multistability behavior of unstable dissipative systems. Chaos Interdiscip. J. Nonlinear Sci. 2018, 28, 033613. [Google Scholar] [CrossRef] [PubMed]
- Holden, A.V.; Fan, Y. From simple to complex oscillatory behaviour via intermittent chaos in the Rose-Hindmarsh model for neuronal activity. Chaos Solitons Fractals 1992, 2, 349–369. [Google Scholar] [CrossRef]
- Carmona, V.; Freire, E.; Ponce, E.; Torres, F. On simplifying and classifying piecewise-linear systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 49, 609–620. [Google Scholar] [CrossRef]
- Chua, L.O.; Yang, L. Cellular neural networks: Applications. IEEE Trans. Circuits Syst. 1988, 35, 1273–1290. [Google Scholar] [CrossRef]
- Echenausía-Monroy, J.L.; García-López, J.H.; Jaimes-Reátegui, R.; Huerta-Cuéllar, G. Parametric control for multiscroll generation: Electronic implementation and equilibrium analysis. Nonlinear Anal. Hybrid Syst. 2020, 38, 100929. [Google Scholar] [CrossRef]
- Instruments, N. dSPACE. Available online: https://www.dspace.com/en/pub/home.cfm (accessed on 15 July 2017).
- Instruments, N. DAQ 6353. Available online: http://www.ni.com/es-mx/support/model.usb-6353.html (accessed on 15 July 2017).
- Peng, C.K.; Buldyrev, S.V.; Havlin, S.; Simons, M.; Stanley, H.E.; Goldberger, A.L. Mosaic organization of DNA nucleotides. Phys. Rev. E 1994, 49, 1685. [Google Scholar] [CrossRef] [PubMed]
- Gaspard, P.; Briggs, M.; Francis, M.; Sengers, J.; Gammon, R.; Dorfman, J.R.; Calabrese, R. Experimental evidence for microscopic chaos. Nature 1998, 394, 865–868. [Google Scholar] [CrossRef]
- Einstein, A. Un the movement of small particles suspended in statiunary liquids required by the molecular-kinetic theory 0f heat. Ann. Phys. 1905, 17, 549–560. [Google Scholar] [CrossRef]
- Dixon, W.J.; Massey, F.J. Introduction to Statistical Analysis; McGraw-Hill: New York, NY, USA, 1969; Volume 344. [Google Scholar]
- Triola, M.F. Essentials of Statistics; Pearson/Addison Wesley: Boston, MA, USA, 2005. [Google Scholar]
- Echenausía-Monroy, J.L.; García-López, J.H.; Jaimes-Reátegui, R.; Huerta-Cuellar, G. Electronic implementation dataset to monoparametric control the number of scrolls generated. Data Brief 2020, 31, 105992. [Google Scholar] [CrossRef]





| 1 M | 100 K | ||
| 10 K | [1–100] K | ||
| 1 K | 100 pF | ||
| [1–100] K | 1 K |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Echenausía-Monroy, J.L.; Campos, E.; Jaimes-Reátegui, R.; García-López, J.H.; Huerta-Cuellar, G. Deterministic Brownian-like Motion: Electronic Approach. Electronics 2022, 11, 2949. https://doi.org/10.3390/electronics11182949
Echenausía-Monroy JL, Campos E, Jaimes-Reátegui R, García-López JH, Huerta-Cuellar G. Deterministic Brownian-like Motion: Electronic Approach. Electronics. 2022; 11(18):2949. https://doi.org/10.3390/electronics11182949
Chicago/Turabian StyleEchenausía-Monroy, José Luis, Eric Campos, Rider Jaimes-Reátegui, Juan Hugo García-López, and Guillermo Huerta-Cuellar. 2022. "Deterministic Brownian-like Motion: Electronic Approach" Electronics 11, no. 18: 2949. https://doi.org/10.3390/electronics11182949