1. Introduction
Navigation is a vital task in the operation of every autonomously moving object. This relates to self-driving cars, autonomous mobile robots, drones and unmanned ships. Autonomous navigation of a craft has to cover perception, obstacle detection and avoidance and path planning and following. Marine units that move autonomously can be divided into autonomous merchant vessels and smaller crafts—Unmanned Surface Vehicles (USVs). The International Maritime Organization (IMO) introduced a term for autonomous merchant vessels—the Maritime Autonomous Surface Ship (MASS), which is used to express
a ship which, to a varying degree, can operate independent of human interaction [
1].
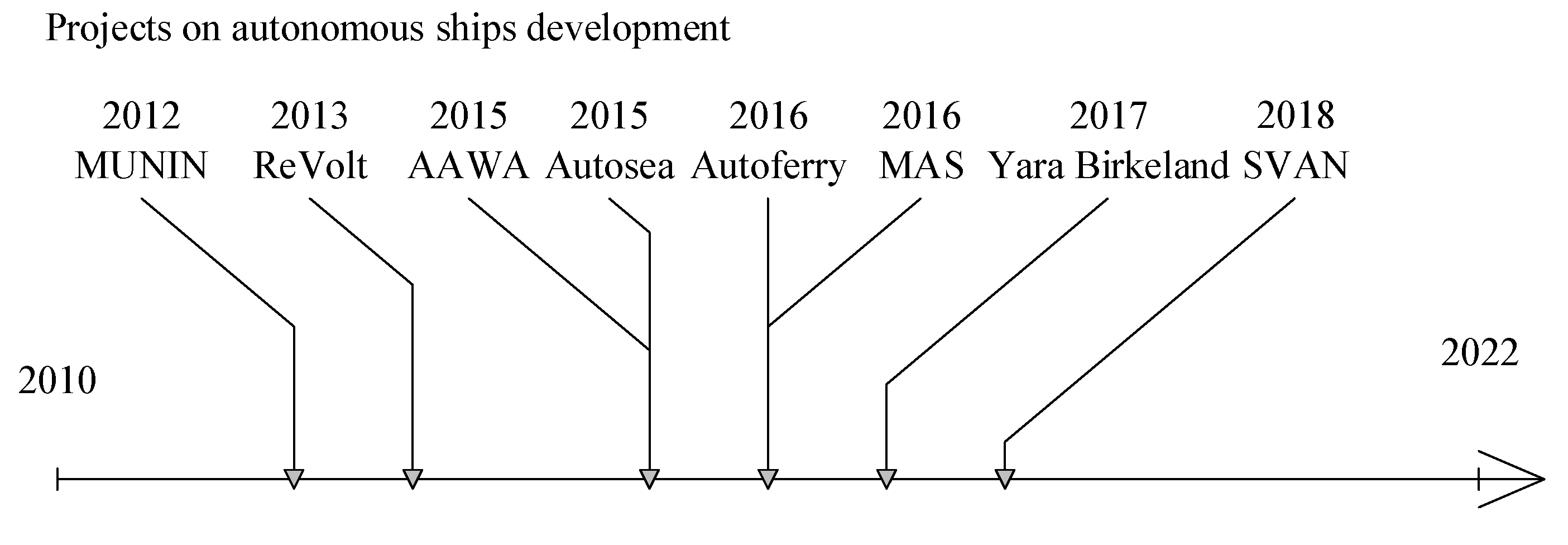
Over the last few years, many research and development projects dedicated to MASSs have been carried out. Examples of such projects, listed in
Table 1 and in
Figure 1, include the Maritime Unmanned Navigation through Intelligence in Networks (MUNIN) [
2], ReVolt [
3], Advanced Autonomous Waterborne Applications (AAWA) [
4], Autosea [
5], Autoferry [
6], Yara Birkeland [
7], Safer Vessel with Autonomous Navigation (SVAN) [
8] and Mayflower Autonomous Ship (MAS) [
9].
The technology of USVs has also developed dynamically in recent years. Examples of recently developed USVs are listed in
Table 2. USVs application areas include defense area, such as surveillance, search and rescue, reconnaissance and strike missions, but also ocean surveying, such as collecting oceanographic data (bathymetry, pollution monitoring). A review of USVs with a special emphasis on the design aspects of the GNC system for these marine crafts can be found in [
10].
Table 2.
Examples of recently developed USVs.
Table 2.
Examples of recently developed USVs.
| USV | Country | Length [m] | Max Speed | Payload | Mission Endurance | Application |
|---|
| Katana [11] | Israel | 11.9 | 60 kn | 2200 kg | 350 nm | Defense/military |
| Protector [12] | Israel | 11 or 9 | 40 kn | - | >48 h | Naval & security missions |
| C-Target 9 [13] | USA | 9.6 | 50 kn | - | - | Defense/military |
| C-Target 6 [14] | USA | 6.5 | 35 kn | - | - | Defense/military |
| Edredon [15,16] | Poland | 5.7 | 30 kn | 1000 kg | 8–130 h | Defense/military |
| C-Worker 7 [17] | USA | 7.5 | 6 kn | 500 kg | 25 days @ 2 kn | Ocean Surveying |
| C-Worker 6 [18] | USA | 5.8 | 6.5 kn | - | 30 days | Ocean Surveying |
| Sounder [19] | Norway | 8 | 12 kn | - | 20 days @ 4 kn | Hydroacoustic Applications |
Recently, different classification societies, maritime organizations and companies have been developing classifications of ships based on their degrees of autonomy [
20]. The Maritime Safety Committee (MSC) of the IMO defined 4 degrees of ship autonomy, as shown in
Table 3 [
1].
The aim of this paper is to present the developed concept of the Autonomous Navigation System for the USV. The main contributions of the research presented in this paper are:
An analysis of recent projects on autonomous ships and USVs with a special emphasis on ANSs and the collision avoidance feature;
The definition of an USV Autonomous Navigation System structure based on the analyzed projects;
The definition of the agent architecture and control flow in the autonomous multi-agent navigation system for USVs, on the basis of a general structure of an agent system;
The development of an effective collision avoidance algorithm to be applied for the maneuver auto-negotiation in the proposed multi-agent system;
Evaluation of the deterministic collision avoidance method for the purpose of the possibility to apply collaborative strategies to avoid collisions with other agents by the calculation of multiple trajectories for all USVs taking part in the considered navigational scenario.
Section 2 introduces the general structure of the Autonomous Navigation System for USVs.
Section 3 presents the concept of the Multi-agent system for USV maneuver auto-negotiation. In
Section 4, the collision avoidance algorithm developed for the application in the ANS for USVs has been briefly described. In
Section 5, simulation tests results obtained with the use of the collision avoidance algorithm are shown, with a special emphasis of solutions achieved from the perspectives of different USVs taking part in the considered encounter situations. Discussion on the results is given in
Section 6 and the paper is summarized in
Section 7.
2. Autonomous Navigation System Structure
The Autonomous Navigation System is responsible for the navigation of the USV. The main tasks of the Autonomous Navigation System of every vehicle include: perception of the environment, path planning and path following (vehicle control).
One of the main subsystems of the ANS is the Collision Avoidance (CA) module. The CA module is responsible for the collision risk assessment on the basis of information obtained from the system that fuses data from various navigational sensors. The second task of the CA module is to ensure the safe navigation of the USV, both on the open sea and in restricted waters. The main element of the CA module is the collision avoidance algorithm, responsible for determining a safe maneuver or a safe trajectory for the vehicle, when a risk of collision has been detected. Besides the CA module, the route planning module is also applied. This subsystem is responsible for the calculation of a global path between the initial and final position, e.g., two harbors, including the craft’s mission, but also weather conditions (therefore known also as weather routing).
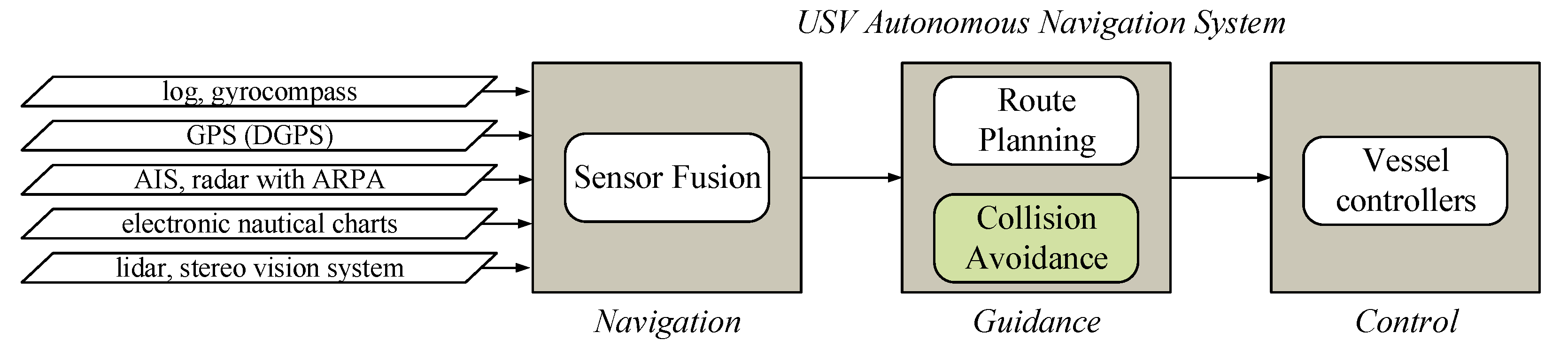
Figure 2 presents a general structure of the Autonomous Navigation System for USVs.
The module responsible for navigational data reception and fusion is the Advanced Sensor Module—ASM, also known as the Situation Awareness module or Sensor Fusion module. Applied sensors include: nautical charts, long-range radars, the Automatic Identification System (AIS), stereo vision systems, short-range radars, lidars and the Global Positioning System (GPS). In relation to the ANS of USVs, the term Obstacle Detection and Avoidance (ODA) system is also used, which reflects a combined version of the Situation Awareness and Collision Avoidance modules. Motion Control system is responsible for the calculation of appropriate control forces to steer the USV along the calculated trajectory or to execute a maneuver determined by the CA module.
Table 4 presents a comparative analysis of ANSs proposed in different research projects on autonomous ships, listed in
Figure 1 and
Table 1. The ANS structure applied in the research presented in this paper was developed based on the solutions proposed in the mentioned projects.
3. Multi-Agent System for USV Maneuver Auto-Negotiation
Multi-agent systems are regarded as a powerful concept for solving real-world problems, especially in complex, dynamic environments, enabling to achieve increased autonomy within control systems [
21].
Table 5 presents a summary of multi-agent systems proposed in the recent literature in relation to ships and different types of unmanned vehicles: USVs, UUVs (Unmanned Underwater Vehicles) and UAVs (Unmanned Aerial Vehicles). The comparison lists the control objects, the purpose of proposed systems, the type of tasks solved by the system, i.e., cooperation and/or competition, the type of applied method and information about the optimization of the task. The last column contains additional remarks, concerning advantages, limitations or other comments with regard to the relation between the mentioned methods and the approach described in this paper. Some of the proposed multi-agent systems are intended for solving a different task than collision avoidance, considered in this paper, such as formation control [
22,
23], training a team of USVs [
24], searching water region by a team of UUV [
25] and/or consider a different type of vehicle, such as UAV [
26], UUV or a car [
27].
The concept of the maneuver auto-negotiation system in relation to autonomous cars was proposed in [
27], to UAV in [
26] and to ships in [
28,
29,
30]. In [
28], collision avoidance and maneuver auto-negotiation is based on geometrical relationships. Two ships encounters are considered in this approach and the solutions might not be COLREGs compliant. In [
29], a concept stage of the task has been presented. The authors assumed the application of evolutionary sets of safe trajectories, where the best set of reciprocal trajectories is calculated, but results of the collision avoidance approach are not presented in the paper. In [
30], the author proposes a structure of the maneuver auto-negotiation system with the concentration on the data acquisition aspect. Safe trajectories are assumed to be calculated as evolutionary sets of safe trajectories. This approach has been presented in the author’s previous works [x, y]. The author proposed a control flow, in which one of the vessels is a leader ship. The leader is responsible for data gathering, determination and optimization of maneuvers and distribution of the results among other participants of the encounter.
The literature analysis shows that the development of a multi-agent system for collision avoidance with maneuver auto-negotiation is an open research problem, as algorithms for the calculation of multiple trajectories are rare in the recent literature. There exists a demand in the industry for the development of an effective, robust and reliable multi-agent system, which will enable for the calculation of a set of safe trajectories for all ships or USVs taking part in an encounter. The development of such a solution is the aim of the research presented in this paper.
Extending the ANS architecture for the purpose of maneuver auto-negotiation was based on multi-agent systems. Multi-agent systems are classified as an approach of Distributed Artificial Intelligence (DAI) [
31]. A multi-agent system is composed of a number of agents, which interact with each other and the environment in order to achieve their goals. Such approach has been applied for modeling and solving problems by cooperation between local solvers and the design of complex systems. An agent is an object, being in a certain situation, that has the ability to perceive the environment and influence it through an autonomous action to achieve a defined goal. In the approach presented in this paper an agent is an USV, perceiving the environment through navigational equipment such as AIS, radar with ARPA, GPS, log, gyrocompass, lidar and stereovision systems. The USV also interacts with other USVs in the surroundings and acts on the environment by changing its course and/or speed.
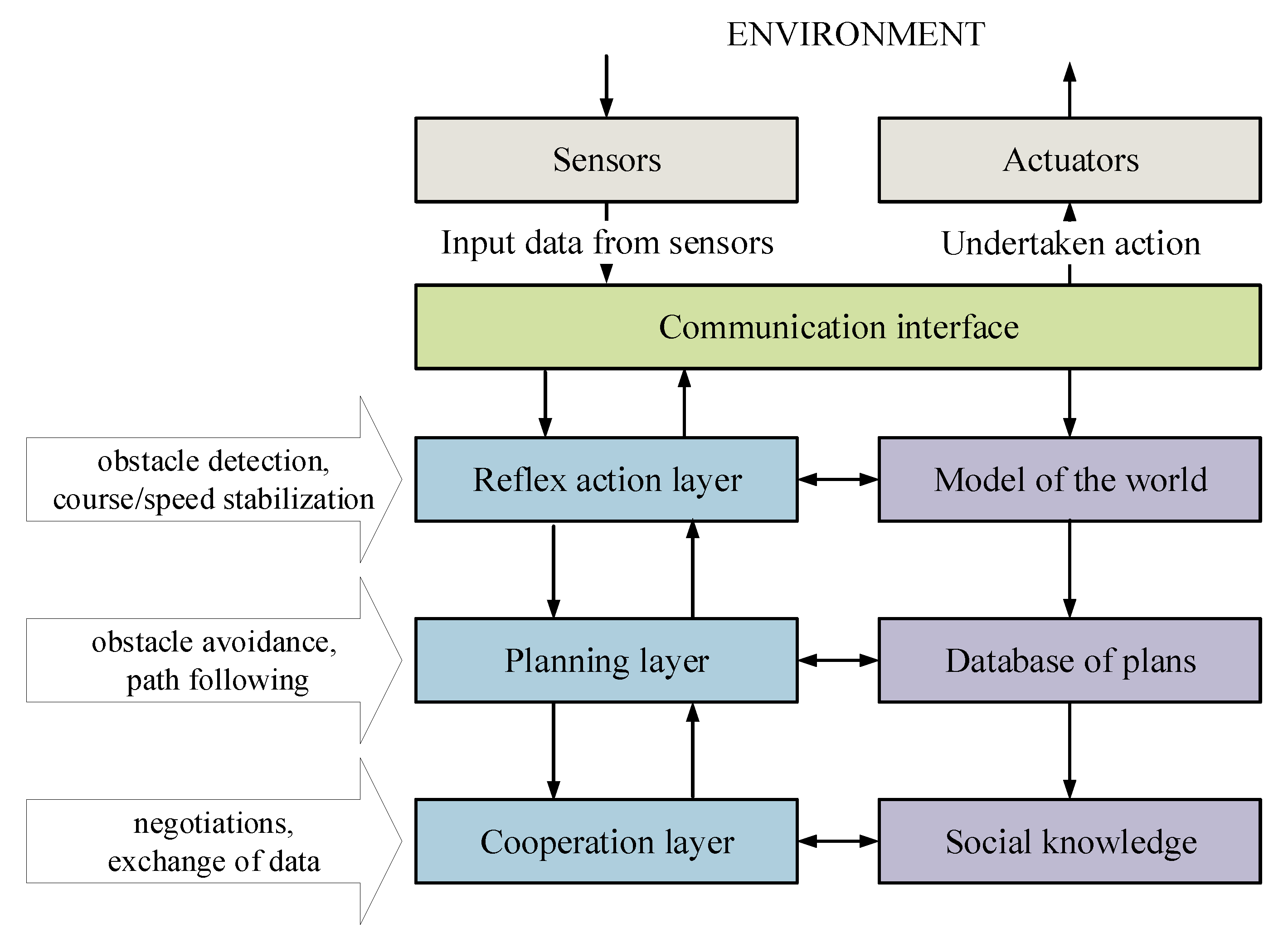
Assumed agent architecture and control flow is shown in
Figure 3 [
25,
32]. The algorithms related to detecting obstacles are included in the layer of reflex action. The planning layer implements obstacle avoidance algorithms [
33,
34,
35] and these responsible for the control of the vehicle along a set trajectory. At the level of cooperation, the vehicle exchanges data with other vehicles and conducts negotiations about planned collision avoidance actions.
The agent architecture applied in this research is the InteRRaP model [
36], which means Integration of Reactive behavior and Rational Planning. This architecture utilized the BDI model of reasoning, which comes from Beliefs, Desires (Goals) and Intentions [
37,
38]. In such an architecture, two types of interaction between different layers are possible. These are: bottom-up activation and top-down execution. In the first type, when a lower layer is not able to deal with the current situation, it passes control to a higher layer. In the second type of interaction, a higher layer uses the functionality assured by a lower layer in order to reach its goal. In the InteRRaP architecture, when new data from sensors arrive at the lowest reflex action layer, it evaluates whether it can deal with the situation. When the layer is not able to perform the task, the control will be passed in the bottom-up activation manner to the planning layer. This layer will also asses the task and when it will be able to deal with the it, after which it will apply a top-down execution. Otherwise, it will pass control to the highest cooperation layer. Such an architecture, in comparison with other layered architectures of multi-agent systems, has as an advantage that only the lowest layer has direct access to actuators. This excludes the occurrence of conflicting decisions between different layers. A different layered approach was proposed in [
39], where appropriate filtering and suppression mechanisms have to be applied in order to prevent the system from conflicts among the actions of different layers.
Agents communicate with each other, while maintaining their autonomy of action and decision-making, which translates into actions taken by individual agents. Such interaction between agents leads to the modification of knowledge and actions of individual agents based on the behavior of other agents. A single agent is equipped with a strategy, leading it to achieve the assumed goal, which in this case is to reach a specific geographical position—the end point of the trajectory. However, as part of a multi-agent system, it must implement collaborative strategies to avoid collisions with other agents. The key feature of agents in a multi-agent system is their collaboration and competition. Therefore, agents exchange information on individual actions taken in order to avoid a collision.
The collision avoidance process with the use of the proposed autonomous multi-agent navigation system for USVs can be performed in one of the two following ways, both of which are possible with the use of the applied collision avoidance algorithm:
- (a)
A decentralized system, where collision avoidance calculations are performed by individual agents (USVs), these partial solutions are then used in the auto-negotiation process;
- (b)
One USV calculates the complete solution of the current navigational situation and then distributes the partial solutions to other agents.
4. USV Collision Avoidance Algorithm
Collision avoidance and safe path planning algorithm applied in the introduced concept of Autonomous Multi-agent Navigation System is a deterministic approach. The algorithm’s operation is based on the search through a database with stored candidate trajectories in order to find the best safe path solving the currently considered situation; therefore, the approach has been called the Trajectory Base Algorithm (TBA). This algorithm has been chosen for further development due to its competitive results in relation to other deterministic and non-deterministic methods. A comparative analysis of different methods, along with the TBA, can be found in [
40].
The main advantages of this approach are: the solution repeatability for every run of calculations with the same input data, achievement of COLREGs compliant solutions with minimal path length and run time of the algorithm enabling the application of this approach for real-time path planning.
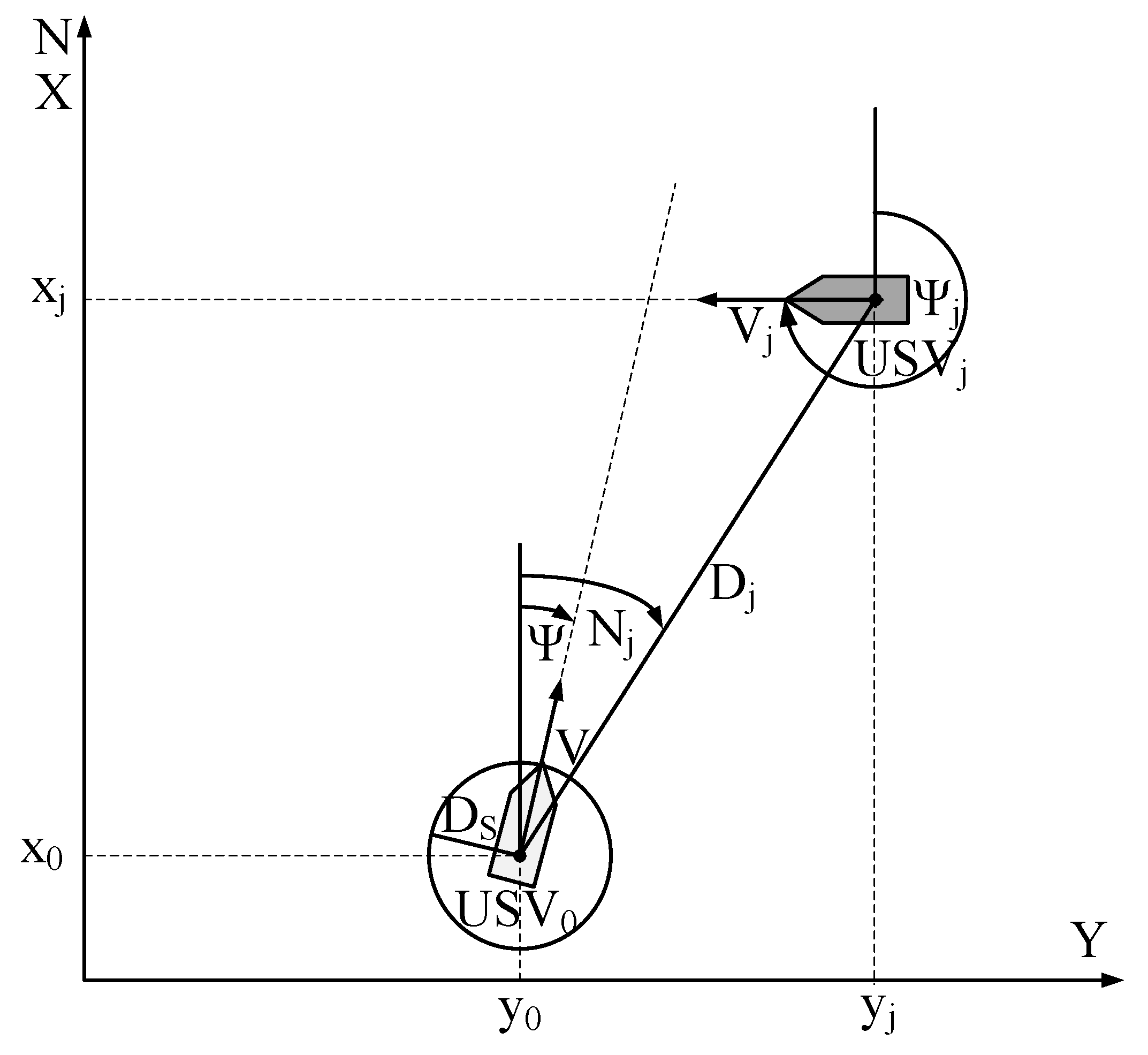
The input variables, shown in
Figure 4, are:
—the course of an own ship (USV no. 0, for which the safe trajectory is currently calculated by the algorithm);
V—the speed of an own ship;
—the course of the j-th USV (also called target ship);
—the speed of the j-th USV;
—the bearing of the j-th USV;
—the distance of the j-th USV from an own ship (USV no.0);
t—the number of a currently evaluated candidate trajectory retrieved from the database;
—the maximum number of candidate trajectories in the database.
The inputs from the database of trajectories are: candidate trajectories composed of a number of waypoints (x and y coordinates of the USV position). The output variables are: safe trajectories composed of a number of waypoints (x and y coordinates of the USV position) and the values of the USVs course at the consecutive parts of the trajectories.
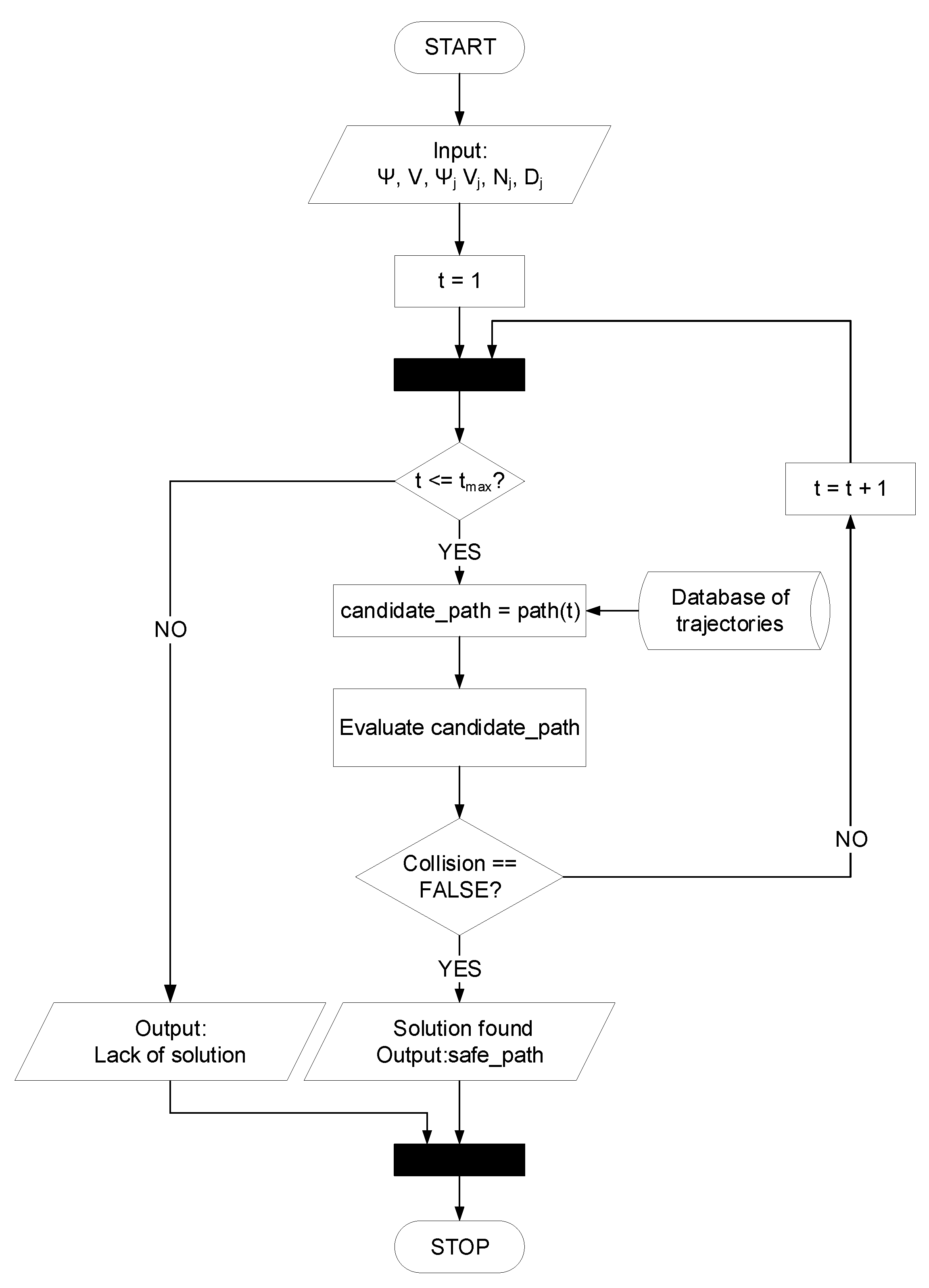
Figure 5 presents a flowchart of the TBA. As mentioned above, input data are the courses, speeds, bearings and distances of all vessels taking part in an encounter. After the reception of input data describing the current navigational situation, the first candidate trajectory is retrieved from the database for the evaluation procedure. The evaluated candidate trajectory is divided into a number of steps. Afterwards, in every step, an own ship is moved into a new instantaneous position along the evaluated trajectory. Target ships are also moved into their next instantaneous positions, resulting from their motion parameters and a trajectory selected for the implementation. Then, the procedure of checking, whether the vessels positions do not lead to a collision, is carried out. When the whole trajectory is verified as a safe path, which means that it does not cause a collision with any of encountered ships during the vessel’s movement along it, it becomes the final best solution. The optimization criterion applied in the collision avoidance algorithm, defined by Equation (
1), is the minimal path length. It is calculated as a sum of the lengths of line segments composing the safe path, where
i = 1, …,
e are the waypoints composing the path:
The information about the selected trajectory, as a part of cooperation activities between agents, is transferred to other agents in a multi-agent system to be used in their decision-making. Further calculations are terminated. A more detailed description of the TBA can be found in [
41].
5. Results of Collision Avoidance Algorithm
The TBA proposed in this paper for USVs collision avoidance has been tested comprehensively in order to validate its reliability and robustness. Various tests of this algorithm have been carried out, including:
Simple encounter situations with one target ship considered in The International Regulations for Preventing Collisions at Sea (COLREGs) (head-on, crossing and overtaking);
Encounter situations with static obstacle (lands, shallows);
Complex encounter situations with real navigational data.
The results of these test can be found in [
42].
One of the methods to assure a proper distance between the USVs or other marine crafts in a collision avoidance algorithm is to model other USVs (target ships) with the use of a ship domain. A ship domain is defined as an area around a ship, which a navigator wants to keep free from static and dynamic obstacles. In the presented approach, a ship domain with a hexagon shape, as proposed in [
43], has been applied. The dimensions of the target ship domain used in the tests were: distance towards the bow: 1.3 nm, distance of amidships: 0.6 nm, distance towards the stern: 0.5 nm, distance towards the starboard side: 0.6 nm and distance towards the port side: 0.5 nm.
For the purpose of the algorithm’s application in the USV Autonomous Multi-Agent Navigation System, the evaluation of solutions consistency from different ships’ perspectives has been carried out. The results of these experiments are presented here. The algorithm was implemented in the MATLAB programming language and tested on a PC with Intel Core i7-10750H CPU, 32 GB RAM, 64-bit Windows 10 operating system. Out of many test cases, four scenarios have been chosen for the presentation in this paper. These test cases have been chosen as standard scenarios, which present the solutions compliance with the COLREGs. Similar test scenarios were presented in the cooperative path planning approach proposed in [
44]. Input data of USVs, including courses in degrees, speeds in knots, bearings in degrees and distances between the marine crafts in nautical miles, are given in
Table 6,
Table 7,
Table 8 and
Table 9.
Table 10,
Table 11,
Table 12 and
Table 13 present output data, such as USV courses in degrees at consecutive parts of the calculated safe path, path lengths in nautical miles and run time of the algorithm in seconds.
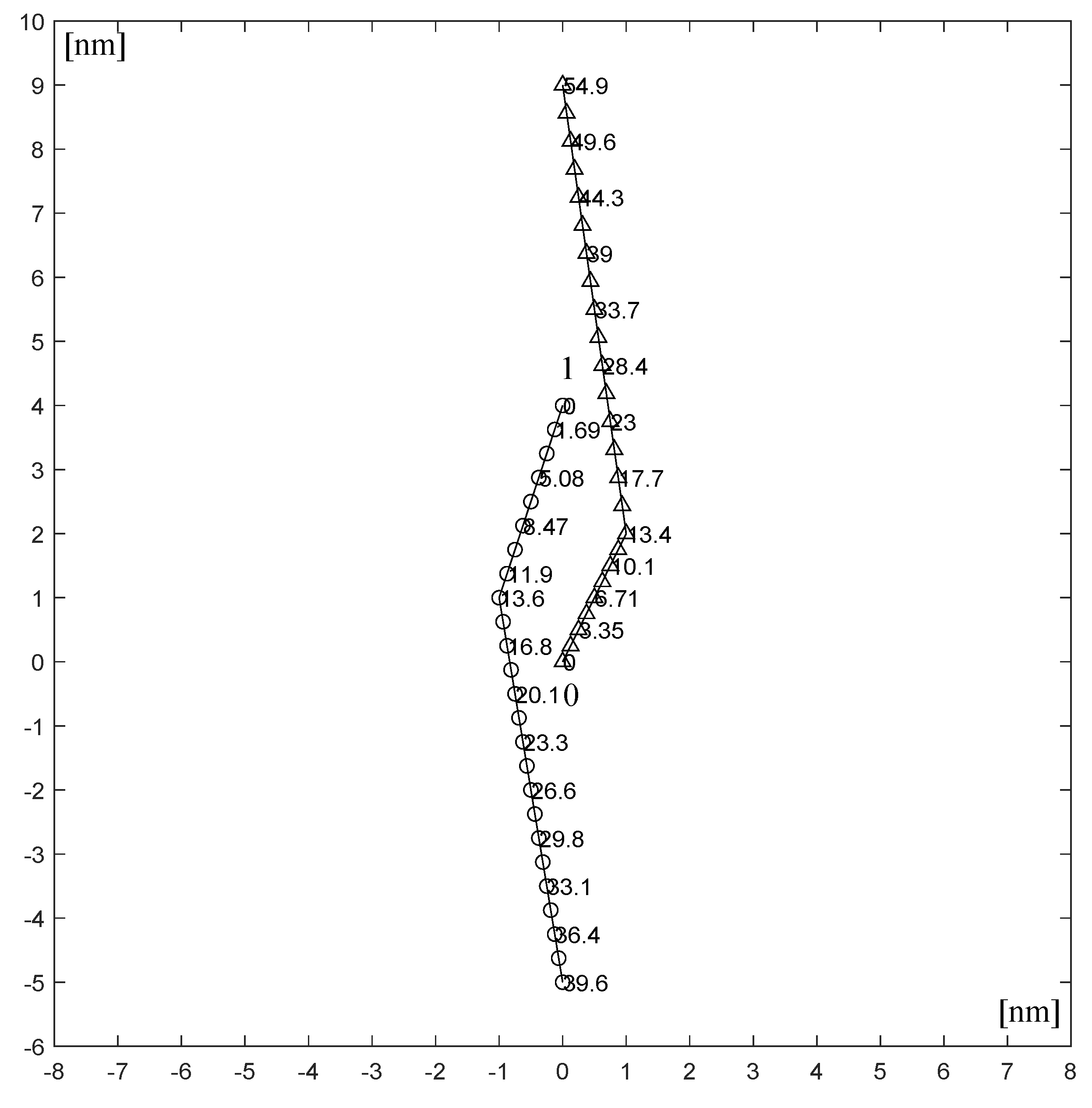
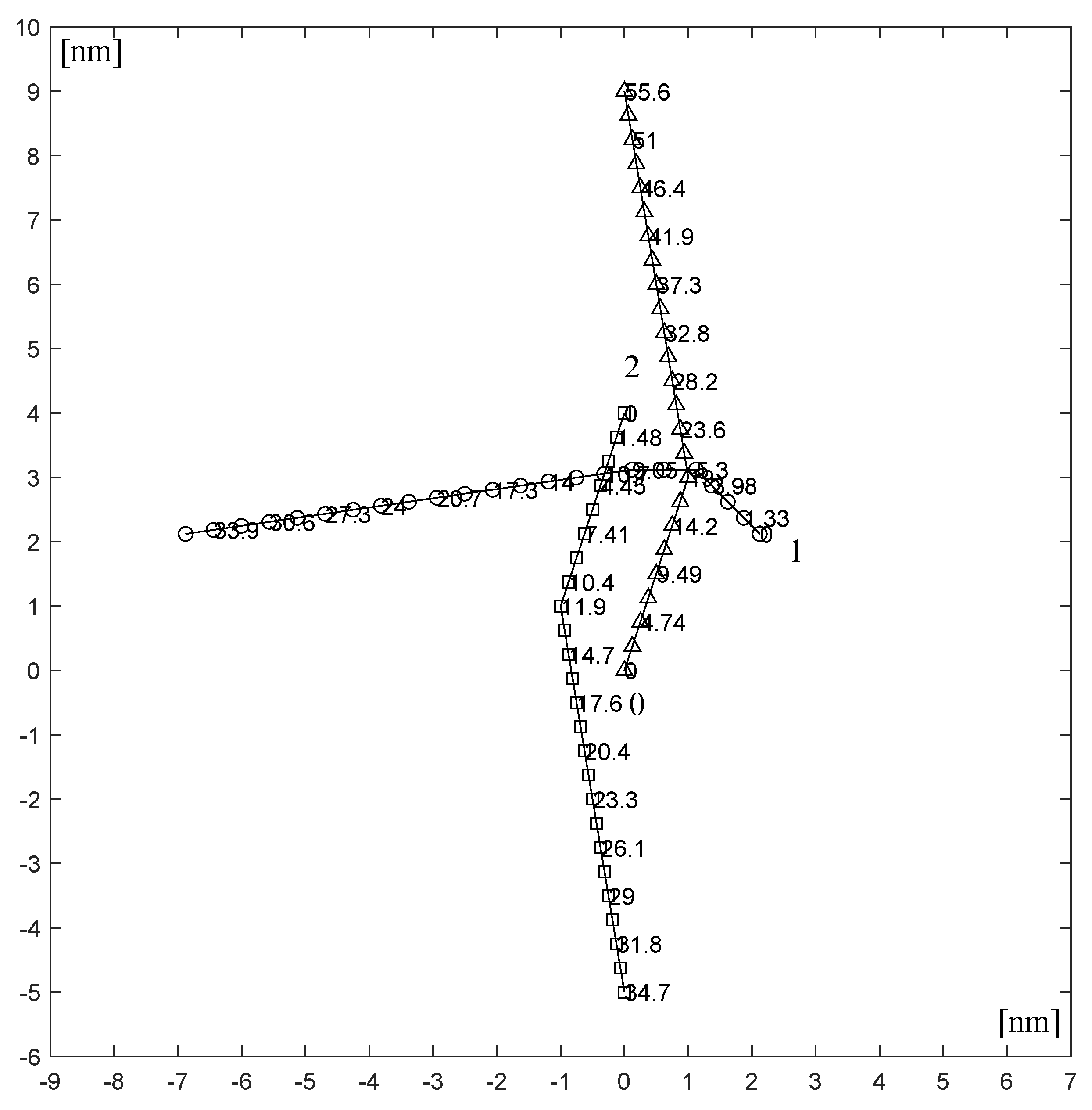
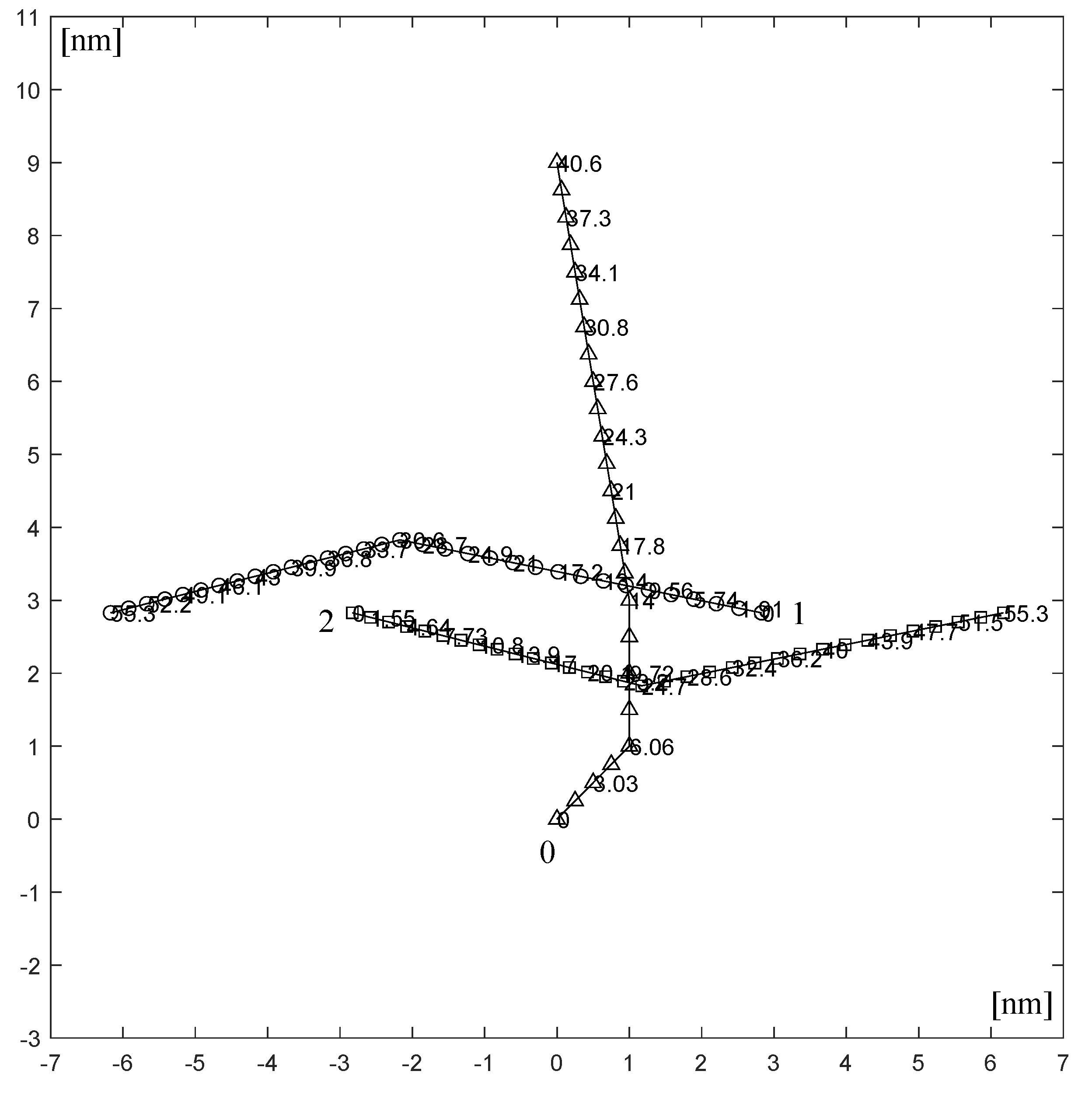
Figure 6,
Figure 7,
Figure 8 and
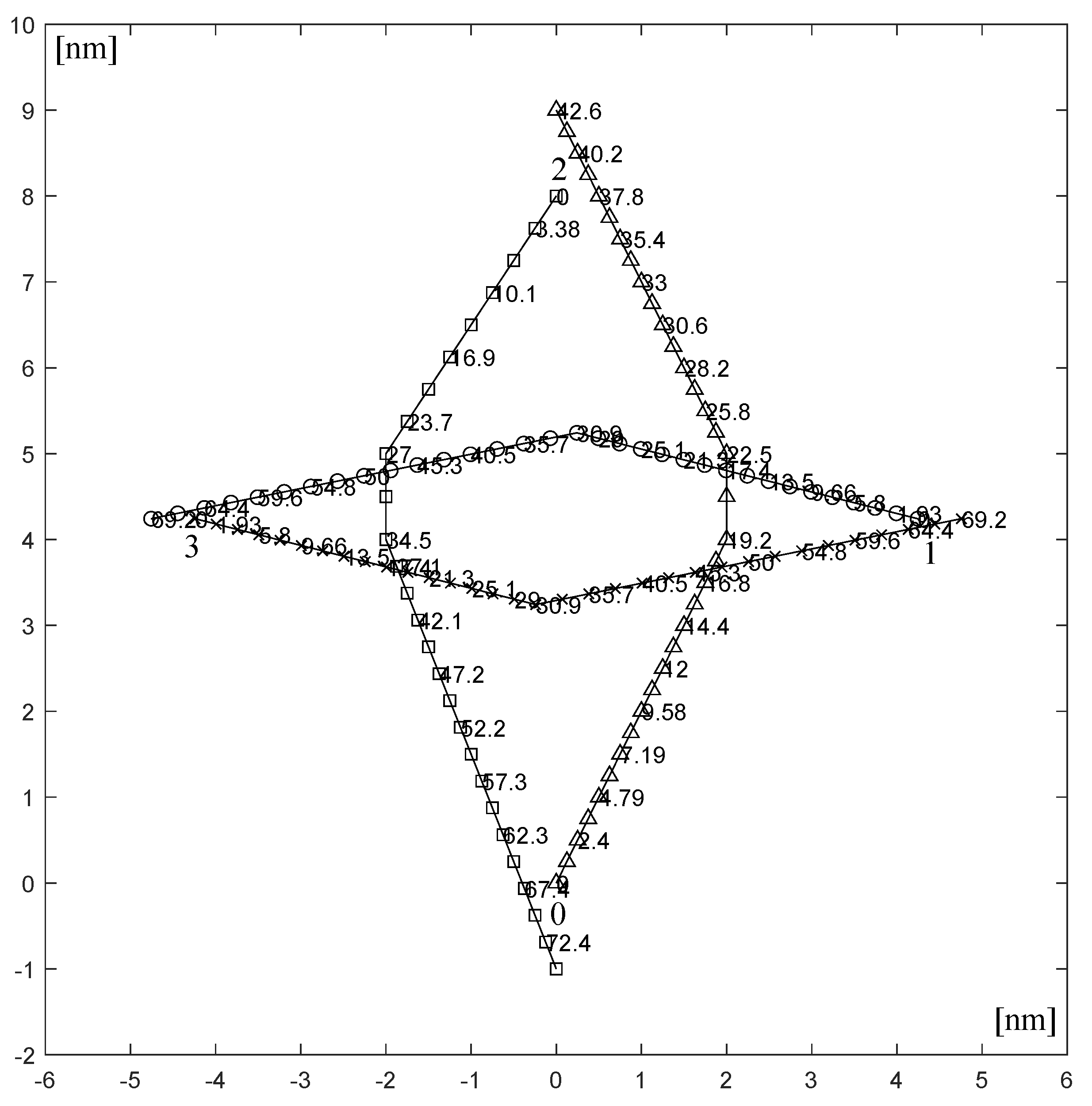
Figure 9 show graphical solutions of test cases 1–4. Initial positions of USVs are marked by digits representing the number of an USV (USV No. in tables). The numbers given along the consecutive positions of the USVs show the time of the USV arrival at a given point in minutes. Presented results have been discussed in the following section.
7. Conclusions
The main contributions of the research presented in this paper in relation to the previous works of the authors are the application of the developed deterministic collision avoidance algorithm within the framework of a multi-agent system for the purpose of USV maneuver auto-negotiation and also the carried out tests of the algorithm in order to assess the possibility to apply collaborative strategies to avoid collisions with other agents in the proposed multi-agent system by the calculation of multiple trajectories for all USVs taking part in the considered navigational scenario.
A concept of the Autonomous Navigation System for Unmanned Surface Vessels, with a special emphasis on the task of collision avoidance, was presented first. A general structure of the ANS system was developed, based on the idea of multi-agent systems. An agent is an autonomous entity that perceives the environment using sensors and acts on the environment through effectors (actuators). The agent’s interaction can be based on cooperation or competition. The goal of the USV, modeled as an agent, is to reach the end point of the trajectory. However, in order to achieve this objective, it has to apply collaborative strategies to avoid collisions with other agents. For this purpose, agents exchange information on planned actions. Proposed collision avoidance algorithm was validated by simulation experiments with a special emphasis on the verification of its applicability for the purpose of maneuver auto-negotiation. The achieved results prove that the trajectories obtained for different agents do not lead to a collision; therefore, the algorithm is suitable for the application in the Autonomous Multi-Agent Navigation System for the USV.
Further research include the development of the communication protocol between agents, allowing them to exchange the information efficiently. After that, experiments in real operating conditions are planned to be carried out.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








