1. Introduction
As a physical fundamental of any country, the road transportation network plays a vital role in both social and economic development. However, with recent rapid socioeconomic development, car ownership continues to rise, which in turn places tremendous pressure on road traffic, and traffic congestion is becoming increasingly problematic [
1]. Optimizing and transforming the traffic network and intelligent management are effective ways to alleviate traffic congestion. Road traffic network analysis and research are of great importance and strongly support intelligent transportation.
Complex networks which describe the relationship between different individuals have become an emerging research hotspot in recent years. Individuals are usually considered to be network nodes and connecting edges if there is a specific relationship between them. Therefore, a large number of nodes and the connected edges between them constitute a complex network. Complex network theory has good applicability in several complex problem fields, including protein, citation, computer, and power networks. Transportation networks are also typical complex network structures [
2,
3,
4]. Many studies have introduced complex network theory into transportation network analysis and research. Shen et al. [
5] used complex network theory to analyze the metro-bus composite network in Chengdu, a small-world network with scale-free features, and analyzed its resistance to destruction under random and deliberate attacks. Chang et al. [
6] used complex network theory to analyze the Beijing rail transit network. Zhang et al. [
7] established the main skeleton regional network and urban network of the national comprehensive three-dimensional transportation network by searching for important nodes with high centrality. They then analyzed their robustness based on proximity centrality, mediator, and PageRank centrality, respectively. Hu et al. [
8] applied complex network theory to urban traffic congestion factor risk propagation. They proposed the concept of network node importance, based on complex network metrics, to classify network nodes and perform direct immune control on core nodes. It was found that this method can reduce the degree of traffic congestion factor risk and speed up risk recovery. Yang et al. [
9] applied complex network theory to critical node identification and integrated the degree and clustering coefficients and neighbors to identify critical nodes and calculate the weights of degrees and clustering coefficients using entropy techniques. The experimental results from four real networks showed that the method can more effectively identify critical nodes. The above study only analyzes traffic complex network topology and features and does not discuss integration with intelligent transportation.
Intelligent transportation can effectively improve traffic congestion and operational efficiency through traffic control and inducement, while real-time and accurate traffic flow prediction is the key to achieving intelligent traffic management. Through various monitors distributed on the traffic network, we can obtain rich traffic data which researchers can apply to deep learning traffic flow prediction models [
10,
11].
Long short-term memory networks (LSTM), convolutional neural networks (CNN), and combined models have been successively applied to traffic prediction problems. Jia et al. [
12] used deep belief networks (DBN) with LSTM to achieve traffic flow prediction under wet weather conditions in Beijing. Ma et al. [
13] dynamically transformed traffic data into images describing spatial–temporal traffic flow relationships and used CNN to extract the spatial–temporal features in the image to realize the traffic speed prediction. LSTM is good at processing time-series data [
14] and CNN is good at extracting Euclidean spatial data features [
15]. Traffic data not only have a temporal correlation, but also have a spatial relationship between monitors, as the source of traffic data is an ir-regular graph structure belonging to non-Euclidean space. Therefore, to fully exploit the spatial correlation between data, a graph convolutional neural network (GCN) is introduced to traffic flow prediction. Zhao et al. [
16] proposed a T-GCN model, which uses GRU to extract temporal correlations between data, and GCN to extract spatial correlations. Yu et al. [
17] established an ST-GCN consisting purely of convolutional neural networks, which combines graph convolution and gated-temporal convolution. There are fewer parameters in this model, allowing it to be more effectively applied to large-scale datasets. On this basis, Guo et al. [
18] proposed the MSTGCN model and applied it to highway traffic prediction. The MSTGCN consists of three independent components modeling the proximity dependence, daily cycle, and weekly cycle dependence of traffic data, with each component consisting of a standard 2-dimensional graph convolution. The ASTGCN model [
19] is based on the MSTGCN but with an added spatial–temporal attention mechanism.
Complex network theory, as a new graph structure data analysis tool, can deeply analyze and mine the spatial relationships among monitoring stations. Tang et al. [
20] used complex network theory to study traffic flow time series, providing a new perspective for traffic flow analysis. The complex network degree distribution can be fitted to a Gaussian function and the cumulative degree distribution can be fitted to an exponential function. The density and clustering coefficients reflect the changes in connectivity between nodes in complex networks, and the change results are consistent with the observed adjacency matrix graph results. Consequently, the range of critical thresholds can be determined, based on complex network theory. This work provides a new method for understanding the dynamics of traffic flow time series. Tang et al. [
21] used the Lempel–Ziv algorithm to evaluate traffic flow data complexity over different time scales. To gain more insight into the complexity and periodicity of the traffic flow time series, each day is considered a cycle, and each cycle is considered a single node, thus constructing a complex network from the traffic flow time series. The complex networks are analyzed according to various statistical properties, including average path length, clustering coefficient, average degree, and intermediate degree. The experimental results in the above paper show that complex networks are a practical tool for mining the dynamic variation characteristics of traffic flow time series. However, the paper only analyzes the traffic flow data through a complex network and does not apply it to traffic prediction.
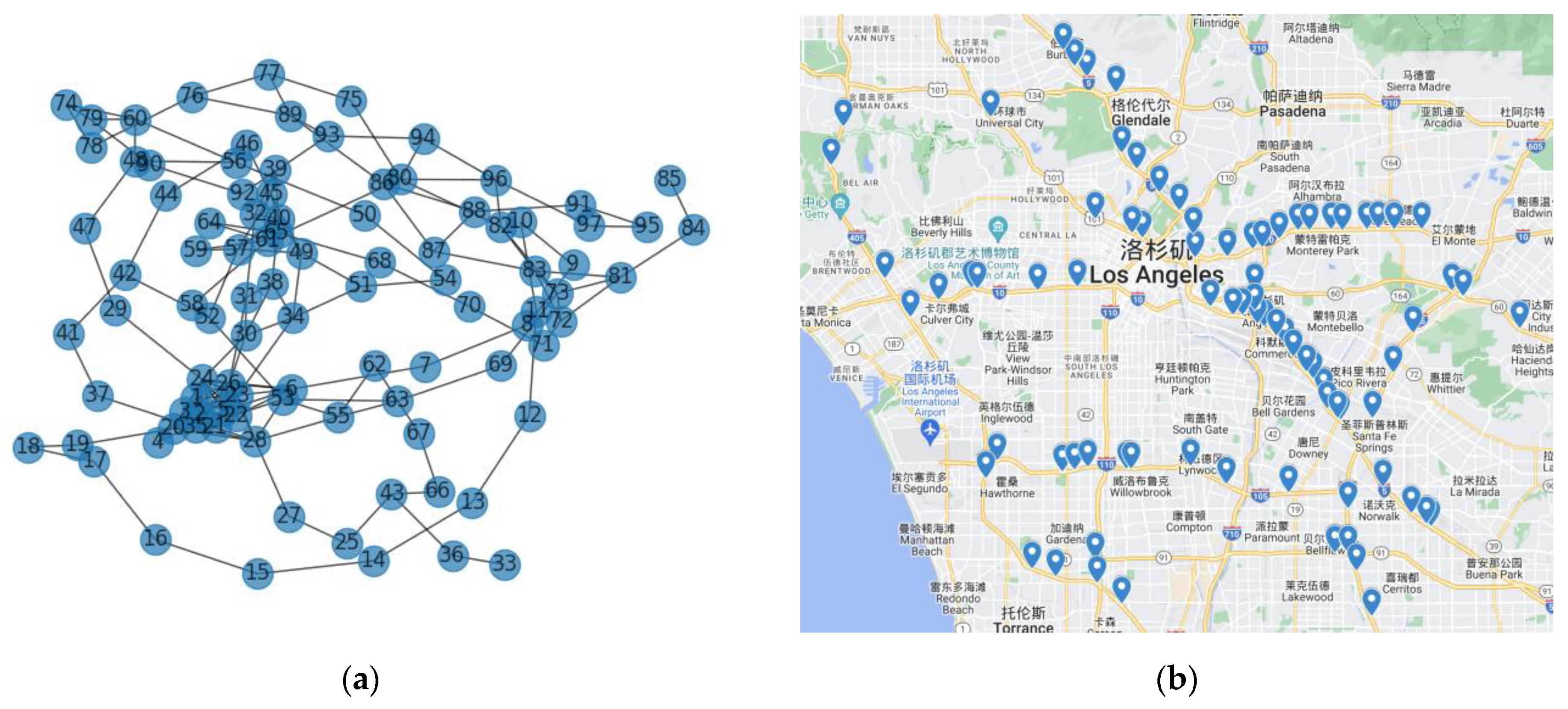
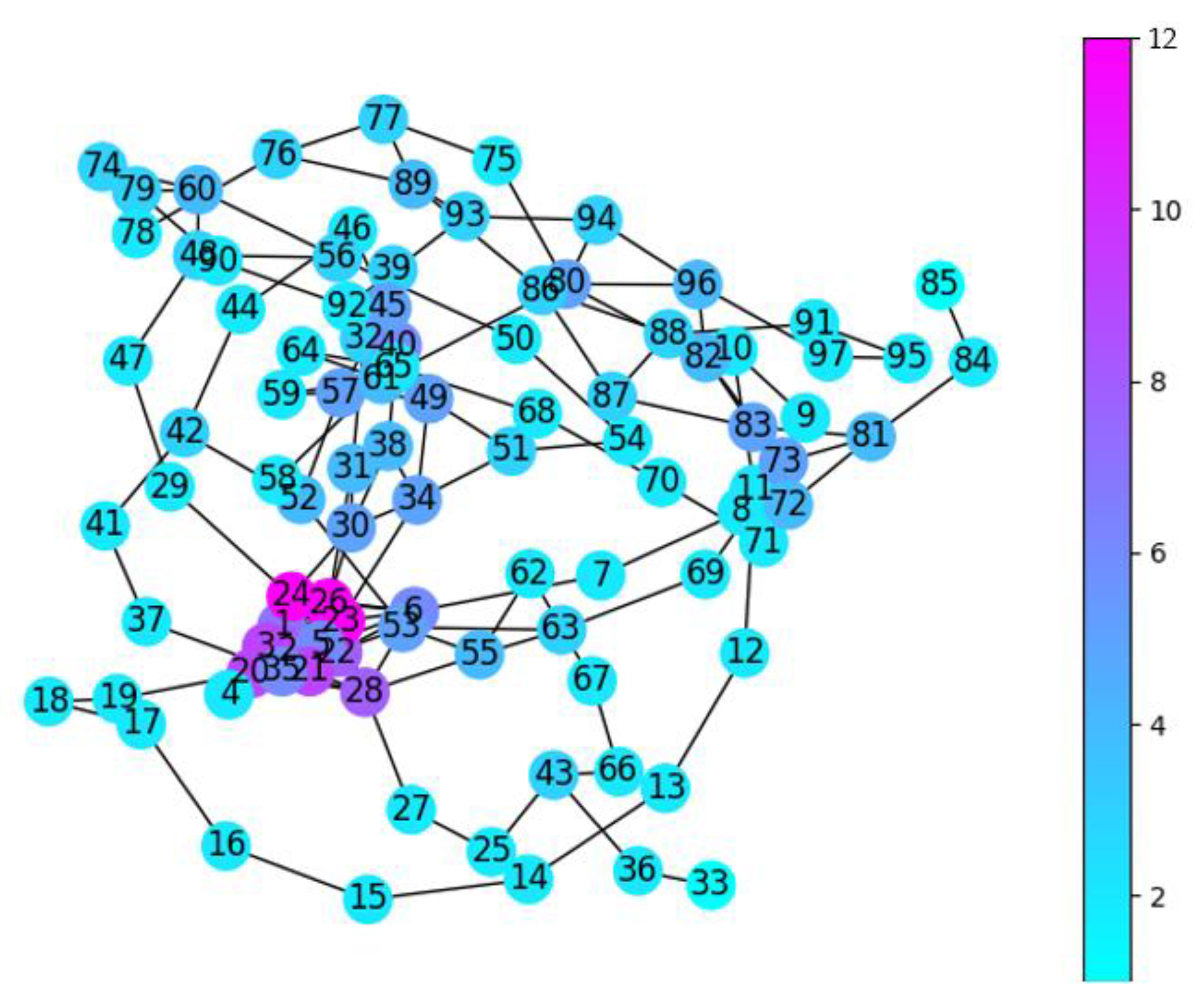
In this research, complex networks and GCN are combined to predict traffic flow. Firstly, a traffic complex network model is established using highway traffic big data, the topological features of traffic road networks are then analyzed by complex network theory, and finally, the topological features are combined with graph neural networks to explore the role of topological features in complex networks in traffic flow prediction. The main motivations and contributions of this paper are as follows.
- (1)
In traffic flow forecasting, many forecasting models are highly accurate. However, a spatiotemporal prediction model, based on the graph structure, cannot consider multiple properties in the graph structure information, which would otherwise enable it to improve the prediction accuracy. This work mines and analyzes many features and information of the complex traffic network composed of traffic nodes and proposes a novel graph spatial–temporal model (GSTNCNI) that can merge the complex network feature information. The prediction times are 5 min, 30 min, and 60 min.
- (2)
The spatial convolution layer in GSTNCNI can fuse the complex network feature information to fully capture and mine the complex spatial correlation relationships between traffic nodes. The temporal convolutional layer in GSTNCNI is used to compute time-dependent time-series features. To overcome the limitations of traditional recurrent neural networks that do not support parallel computation and slow training speed, the temporal convolution layer uses a multilayer residual structure instead of the gating mechanism of recurrent neural networks.
- (3)
Comparison and ablation experiments are conducted on GSTNCNI using the PeMS dataset. The experimental results show that GSTNCNI is optimal, and exhibits a strong, stable traffic flow prediction performance.
3. Deep Spatial–Temporal Model Design
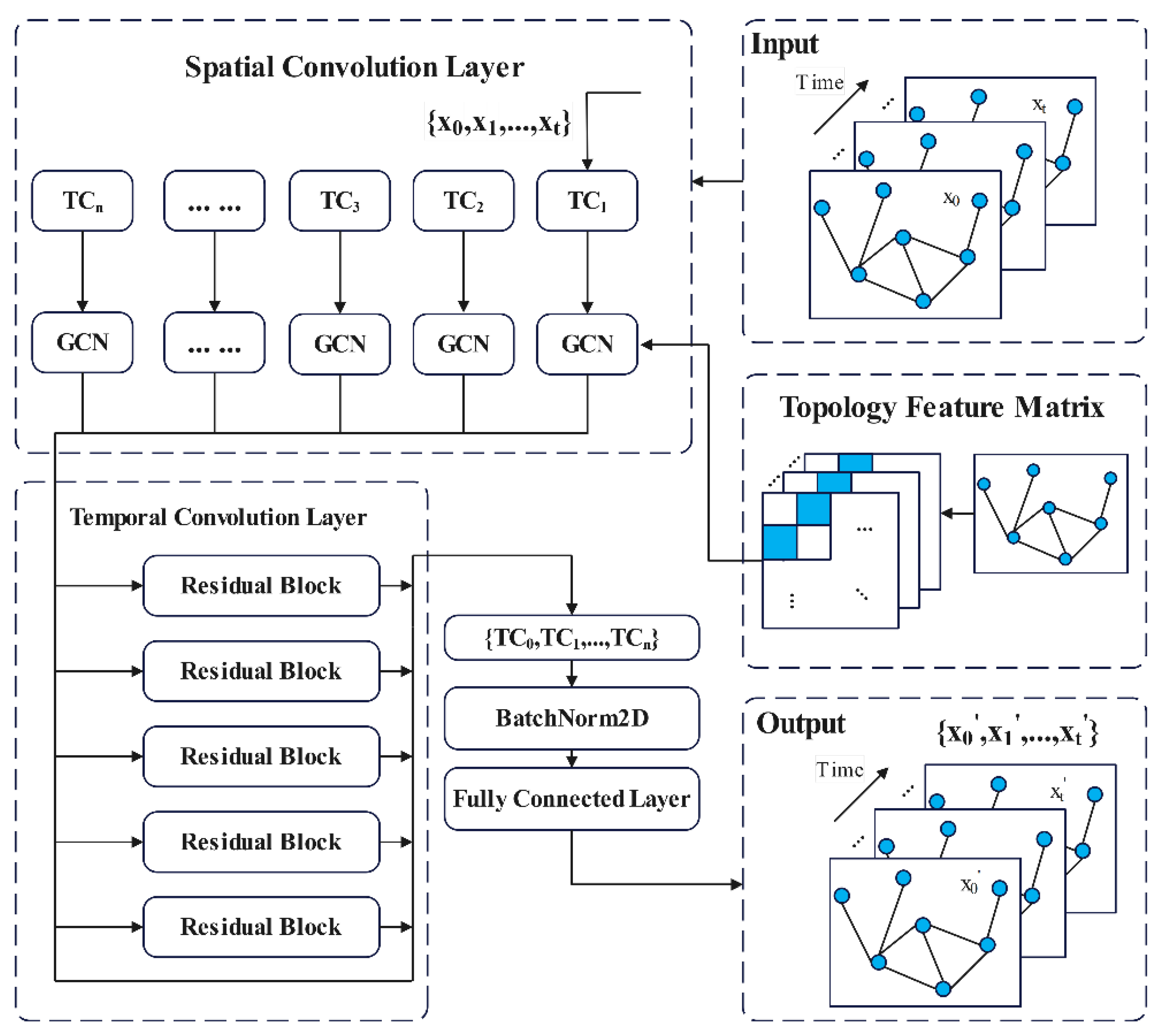
Figure 9 shows the GSTNCNI model structure which consists of two main parts: the spatial convolutional layer for modeling the spatial correlation relationship between traffic nodes and the temporal convolutional layer for modeling the temporal data temporal dependence features. To highlight the impact of complex network features on the model performance, we introduce the complex network feature calculation process in spatial relations. A detailed elaboration of the spatial and temporal convolutional layers is shown in
Section 3.1 and
Section 3.2, respectively.
- (1)
Input data periodicity
This paper divides the traffic flow data into 5 min time steps. As described in
Section 2.1, the traffic network topology graph is defined as
, where
is the set of nodes in the traffic network topology graph.
indicates that there are
nodes in the topology graph. Let the input data time periods be
;
represent the
-th node traffic flow size in the
-th time periods.
represents the traffic flow of all nodes at the
-th time periods.
represents all traffic flow data. Since the change of a node’s traffic flow data is affected by the traffic flow change of the node in the previous period, this paper uses the historical traffic flow data of the previous hour, that is, 12 time periods, to predict the future (12 time periods) traffic flow. When the model predicts the traffic flow of all nodes 12 time periods after
, the input data of the model is defined as:
- (2)
Data Standardization
When training the traffic flow data, the large range of traffic flow values can lead to low traffic data prediction accuracy and slow gradient descent for the optimal solution. To resolve these issues, the Z-score normalization method is used in this paper and the data are processed to conform to standard normal distribution with the transformation function. where
is the real traffic data,
is the mean of all the sample data, and
is the standard deviation of all the sample data. During the data standardization process, the traffic flow data mean and standard deviation need to be calculated. Standardization of the data can lessen the effect of some large variable values on the model.
The Dropout mechanism [
28] is used to prevent the overfitting of the complex model in this paper. This mechanism simplifies the model by randomly discarding a part of the neuron nodes (feature detectors) which prevents the model from overfitting. Since the two neurons do not necessarily appear in a network, this can reduce the interaction between the neuron nodes. By randomly discarding part of the neuron nodes, the neurons can pay more attention to whether their feature detection is advantageous to the final result, rather than relying on the feature values detected by other neurons with a fixed relationship.
- (3)
Output data periodicity
In addition,
indicates the
-th node traffic flow at a future moment
. The traffic flow of all nodes at the future moment
is shown in Equation (3).
3.1. Spatial Convolution Layer
In the graph neural network process, it is essential that each node in the graph is influenced by its related neighbor nodes and changes its state until it reaches an equilibrium state. This influence becomes greater as the closeness of the relationship increases [
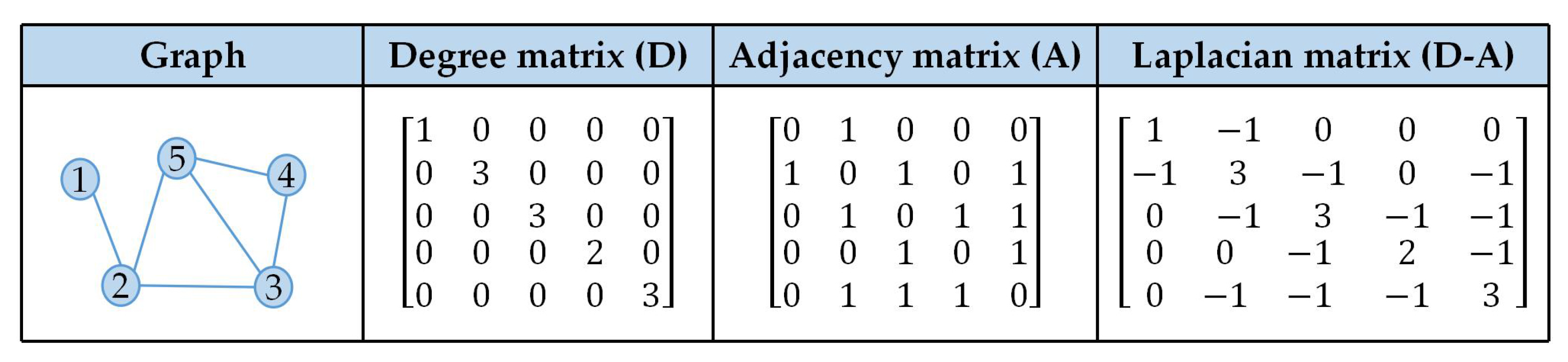
29]. As mentioned above, the network topological features can describe the network-resultant features and reflect the role and importance of each node in the network. The graphical neural network introduces a modified version of the Laplacian matrix to incorporate the influence of neighboring nodes as well as its own nodes in the network into the calculation process. As shown in the
Figure 10, the Laplacian matrix
of a graph is defined as:
, where
is the degree matrix.
is the adjacency matrix [
30]. The normalized Laplacian matrix is shown in Equation (12).
The problem of transferring node information is overcome in the Laplacian matrix, and the first-order Chebyshev approximation is used to simplify the calculation [
31], as shown in Equation (13), where
θ is the trainable parameter matrix,
D is the degree matrix, and
x is the input signal.
The matrix T is introduced as the network topological characteristic matrix.
can represent the six network topological features above, such as degree centrality, clustering coefficients, closeness centrality of nodes, etc. Parameter initialization is an important part of parameter training and has a significant impact on the model accuracy.
By normalizing the T matrix to , the influence of different features is reduced in terms of magnitude, thus reflecting the relative importance of the node’s features in the network. θ is initialized to the value of matrix, thus realizing the topological properties of the network into the graph convolution process. θ already contains the relative-importance information of the node at the beginning, which can achieve faster convergence in the training process. This makes the results closer to the global optimal solution, as shown in Equation (14).
Different features correspond to different initialization parameter matrices, which in turn correspond to different GCN modules, and the modules corresponding to different features are fused by weighting and are trained centrally, as shown in Equation (15), where
n is the number of GCNs.
3.2. Temporal Convolution Layer
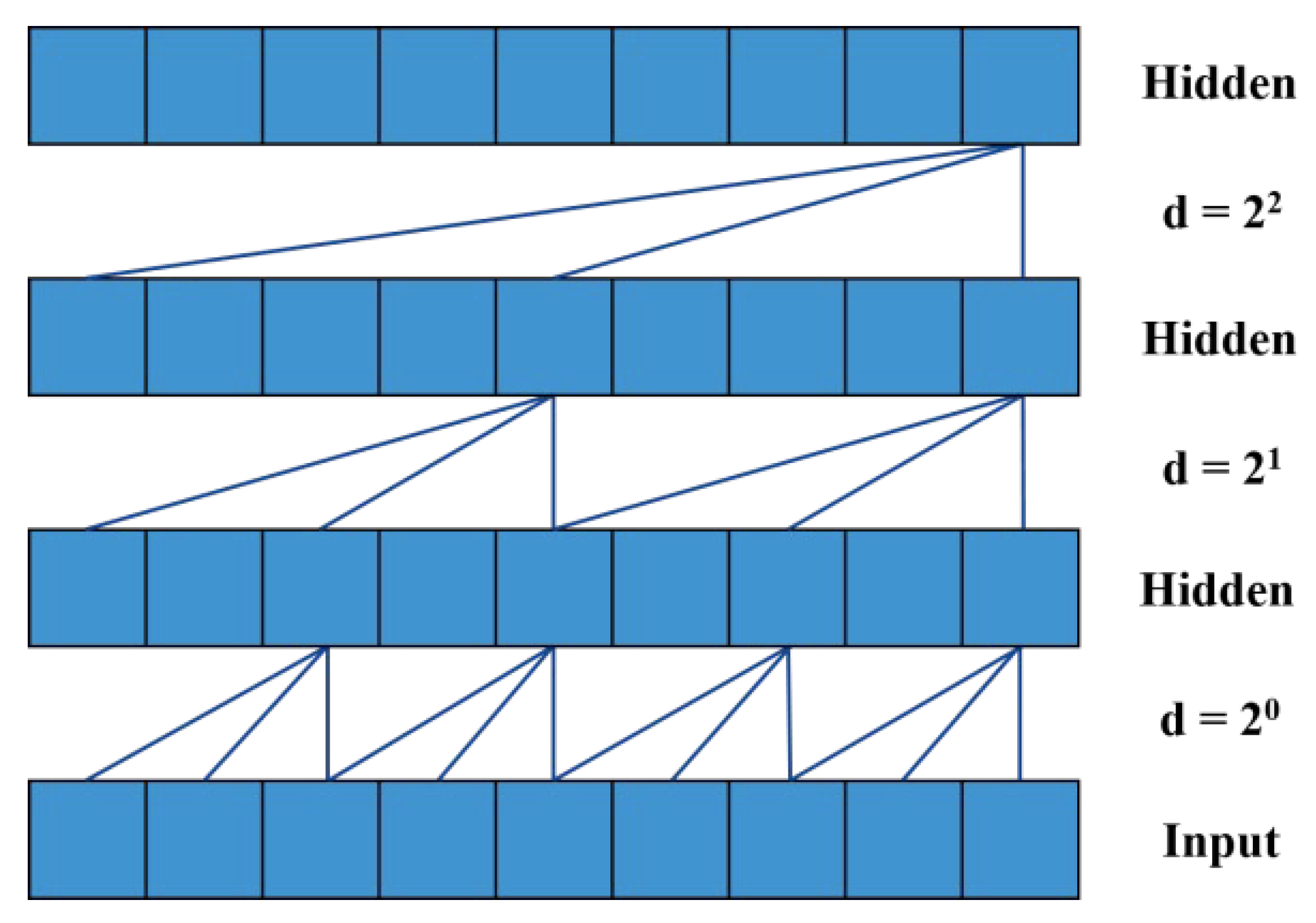
A special Temporal Convolution Layer (TCL) was designed in this paper to compute the data time-dependent features, as shown in
Figure 11. The TCL is particularly useful in three ways. Firstly, it can retain all the historical information and compute long-term historical information using causal convolution. Secondly, it uses dilated convolution to extend the receptive field of the convolution process. The dilation rate varies according to a convex function, which allows the model to compute deep features without losing any local information due to an oversized receptive field. Finally, it is entirely composed of convolutional networks and uses a multilayer residual structure instead of the traditional “gate” structure. Furthermore, TCL overcomes the traditional RNN issues of not supporting parallel computation and slow training speed [
32]. In general, TCL can effectively mine and model the data temporal features, unlike Convolutional Gated Recurrent Units (ConvGRU), which allows GRU to directly process image information by introducing convolutional operations.
Causal convolution [
33] in the TCL is used to obtain long-term historical information. The causal convolution formula is shown in Equation (16), where
denotes the input sequence,
Y denotes the output sequence, and
denotes the filter. The causal convolution focuses solely on historical information and ignores future information. In addition, the larger K is, the more historical information is obtained during the causal convolution.
A downsampling process is required by the model in deep neural networks to increase the receptive field and reduce the computational effort. However, downsampling also leads to a decrease in spatial resolution. We therefore consider the use of dilated convolution [
34] to maintain a certain degree of spatial resolution while increasing the receptive field. Dilated convolution has a parameter that sets the dilation rate, meaning that the convolution kernel is filled with dilation rate. As a result, the dilation rate and size of the receptive field vary, enabling multiscale information to be acquired. The dilated convolution formula is shown in Equation (17), where d denotes the dilation rate, which changes as a convex function according to the depth of the network. Increasing either d or K can widen the receptive field range. However, the receptive field will be deepened with the network layers in a deep network so that there is no correlation between the information obtained from the long-distance convolution, resulting in a loss of local information. Consequently, we vary the dilation rate according to an exponential function of 2, as in the d variation process in
Figure 11. This design pattern ensures that the perceptual field range in the deep network is limited to a certain extent, reducing the loss of local information.
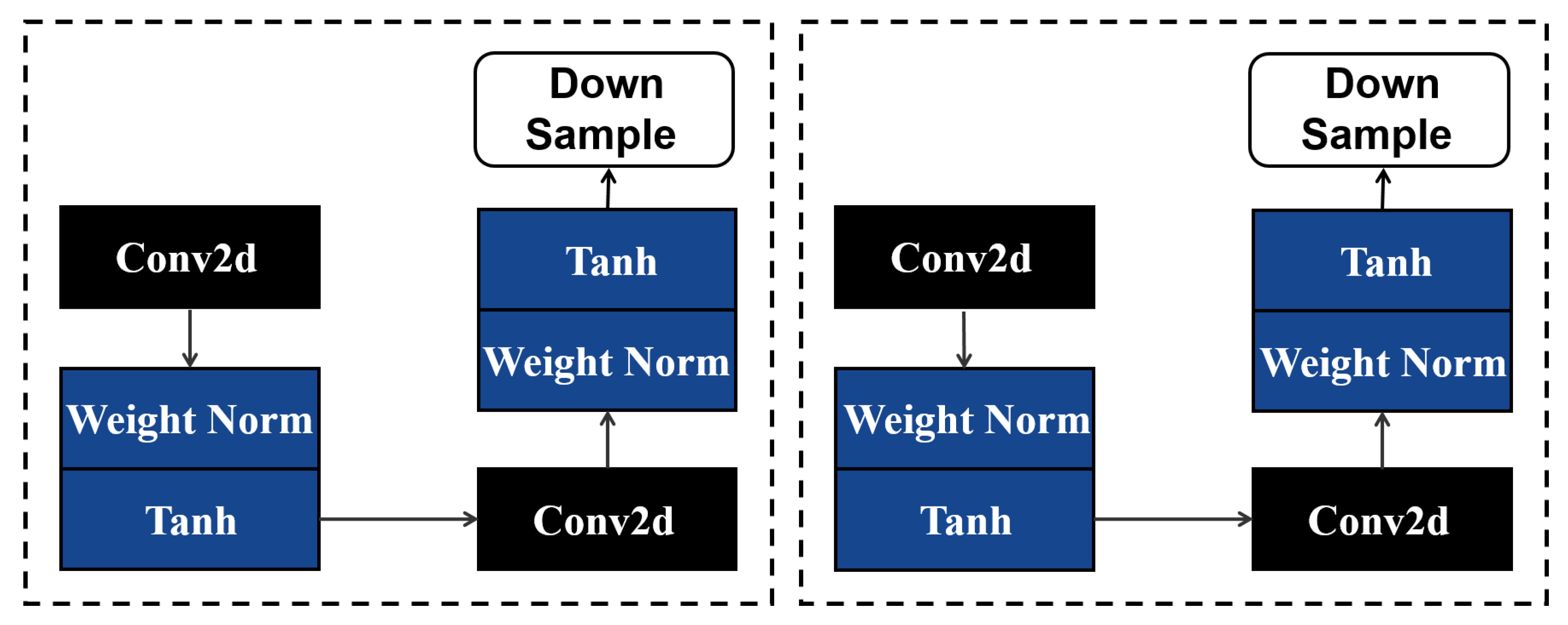
The residual structure is used instead of the traditional “gate” structure to diminish the training process complexity and increase the training speed, as shown in
Figure 12. The residual structure consists mainly of a two-layer convolutional network and a nonlinear mapping process. Weight Norm [
35] is a data normalization method that rewrites parameters and is often used to accelerate model convergence. By normalizing the weight, it can ensure that the gradient range is suppressed when the gradient is backpropagated, and thus, the gradient becomes self-stabilizing. In addition, the Dropout layer can ignore a certain number of neurons to reduce the overfitting phenomenon. TCL contains five layers of residual blocks.
5. Discussion
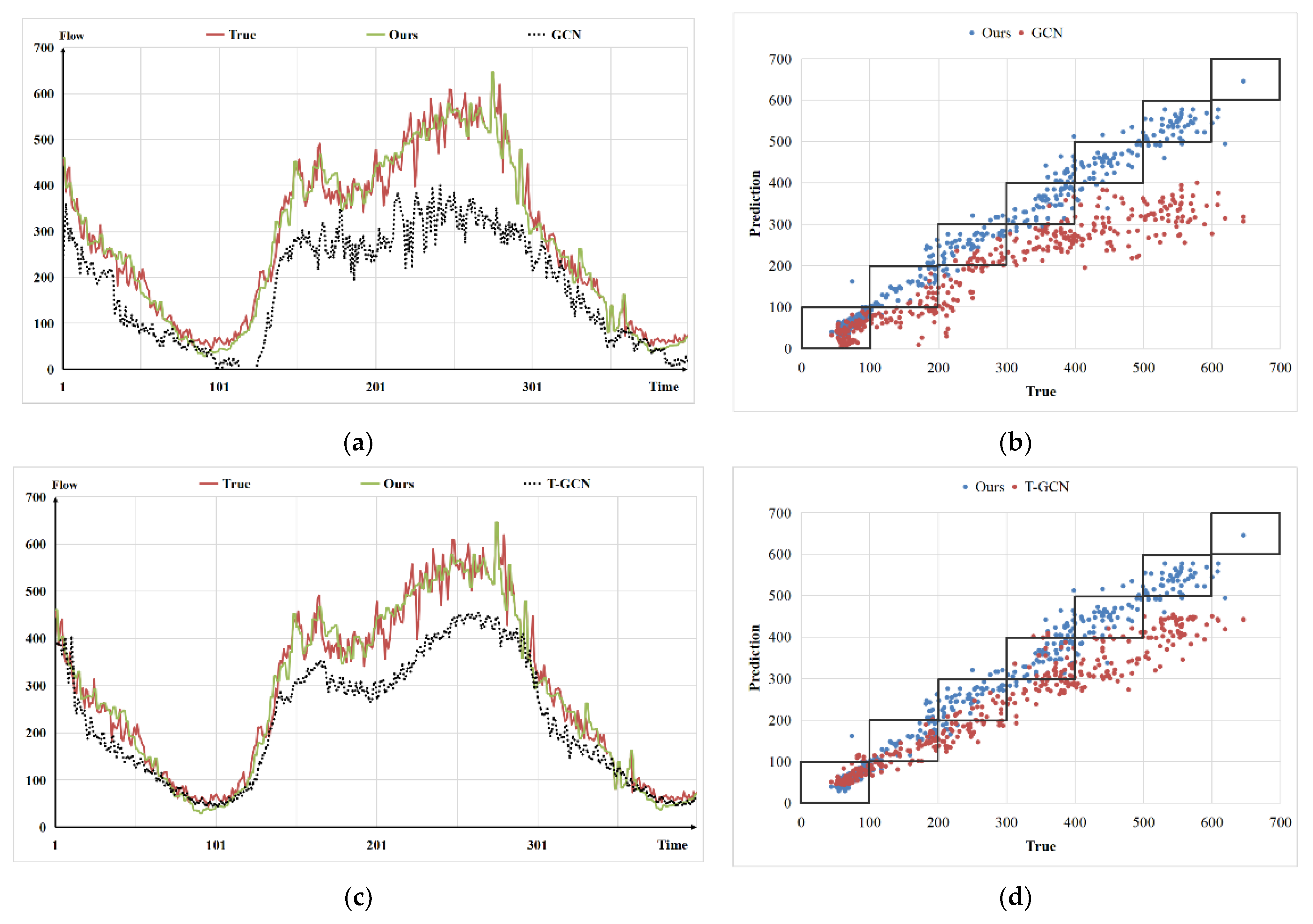
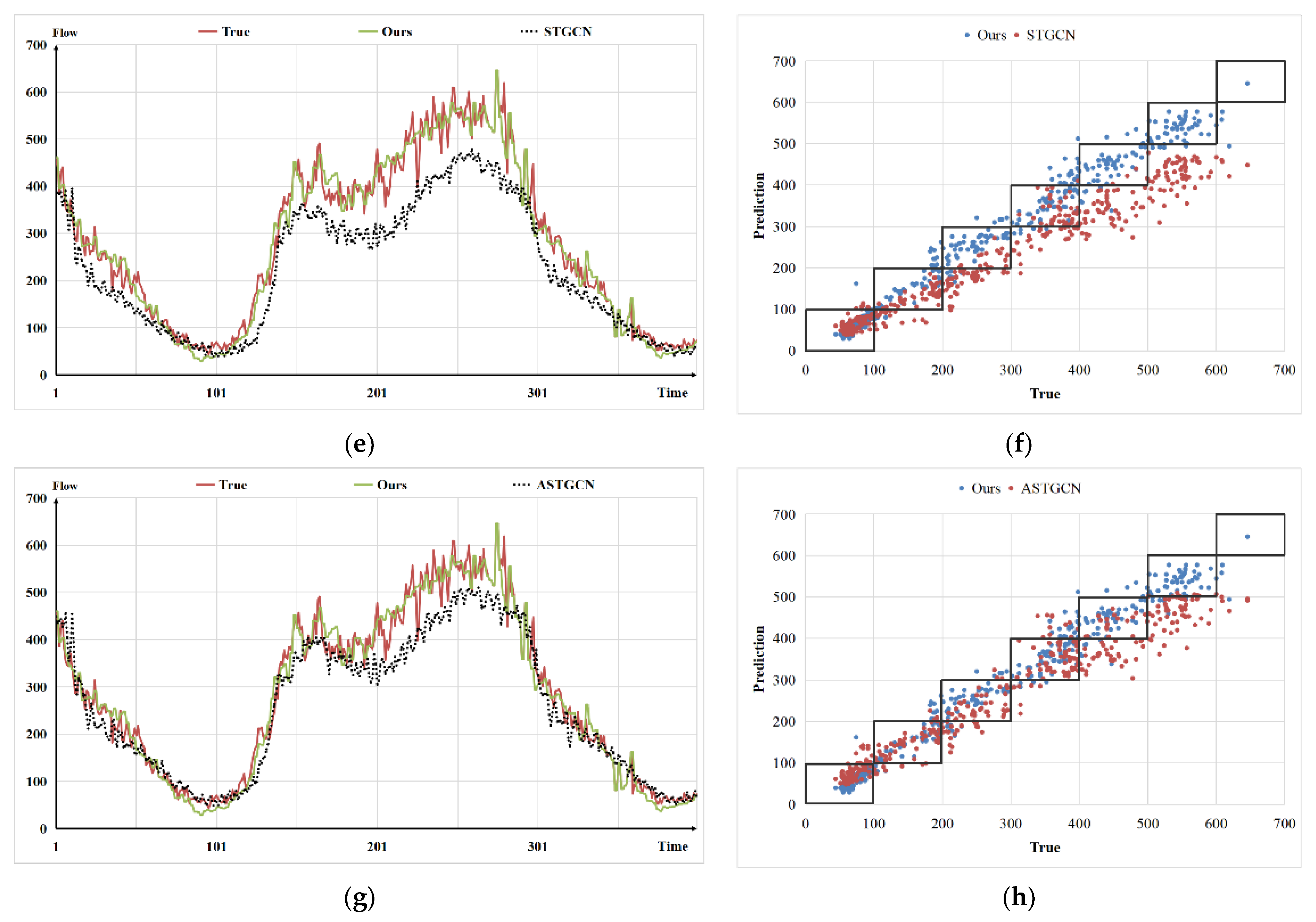
Traffic flow data have a strong spatial correlation and certain baselines can adequately extract their spatial characteristics. However, traffic flow data, as typical time series data, also possess a strong temporal correlation. Although certain models can adequately extract the traffic flow data spatial features, they lack analysis of the traffic flow data temporal correlation. In recent years, graph spatial–temporal networks have been widely used in the field of spatial–temporal traffic flow data prediction. The unique features of graphs can capture the structural relationships between data. Therefore, more insights can be attained using graph structures rather than using data analysis. However, solving the learning problem on graphs is often challenging. An effective solution is to learn graph representations in low-dimensional Euclidean space to preserve certain graph attributes with the vast majority of the information. Deep learning models, based on graph structure information, have recently emerged in the deep learning field and have exhibited superior performance for a variety of problems. However, GCN uses the traffic network adjacency matrix to compute the Laplace matrix and complete spatial correlation analysis based on it. This method lacks analysis of traffic node characteristics and so to resolve this, this paper uses the topological features of six complex networks to assist in calculating the Laplace matrix and improve the GCN. The experimental results show that GSTNCNI can accurately fit real traffic flow data and improve traffic flow data prediction. Compared with all baselines, the complex network-based approach proposed in this paper improves the actual performance by about 31.46% on average.
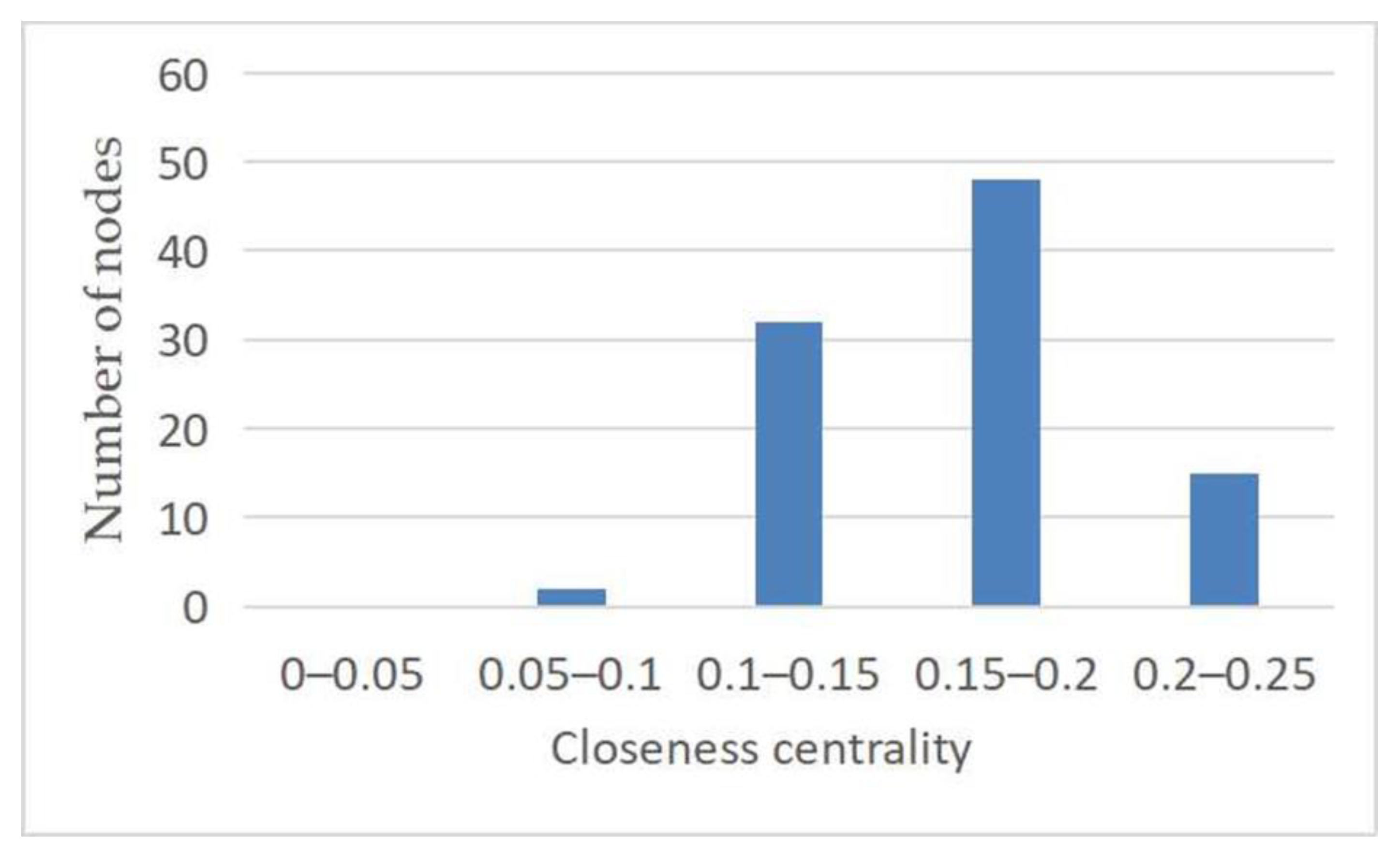
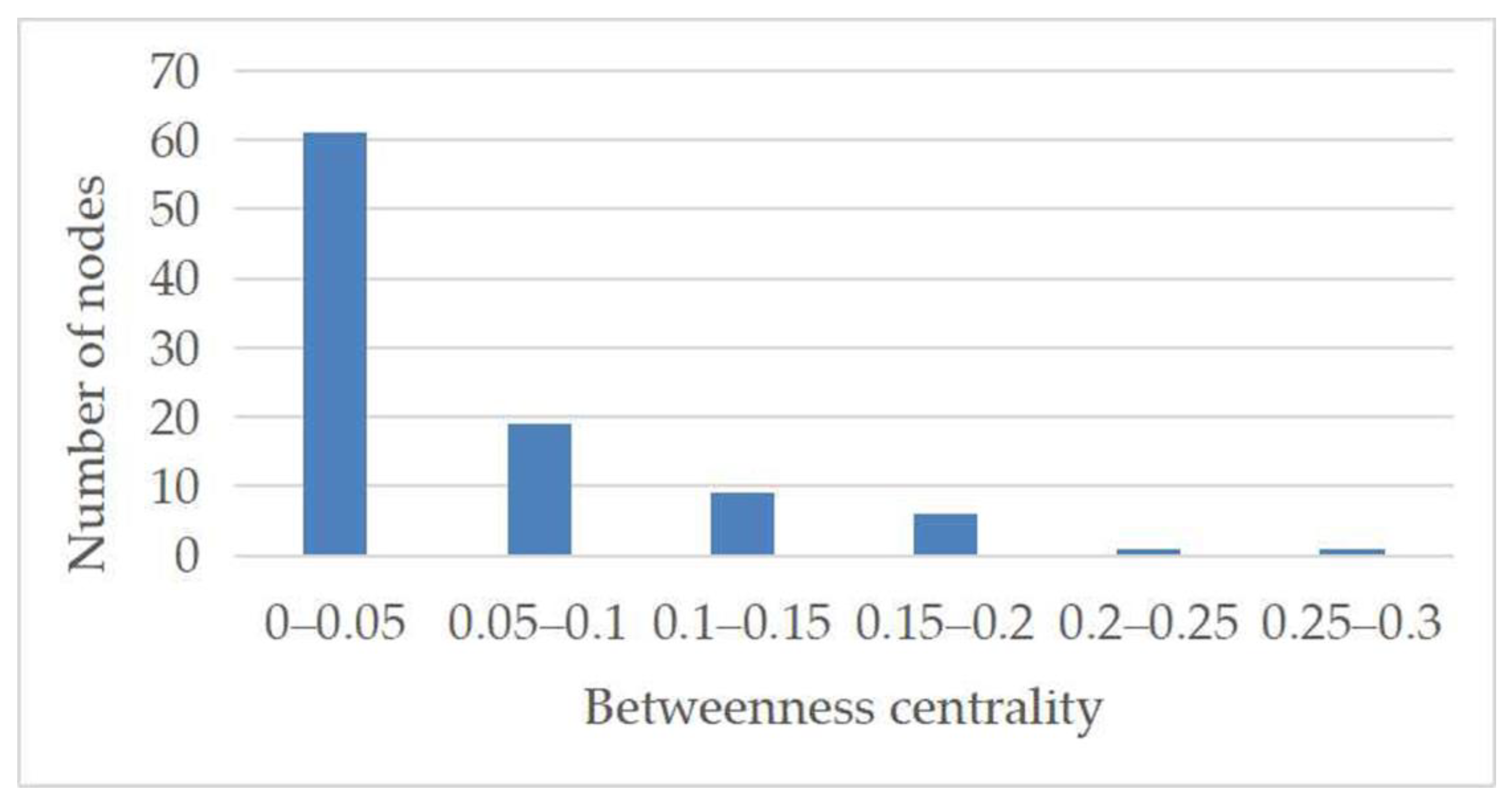
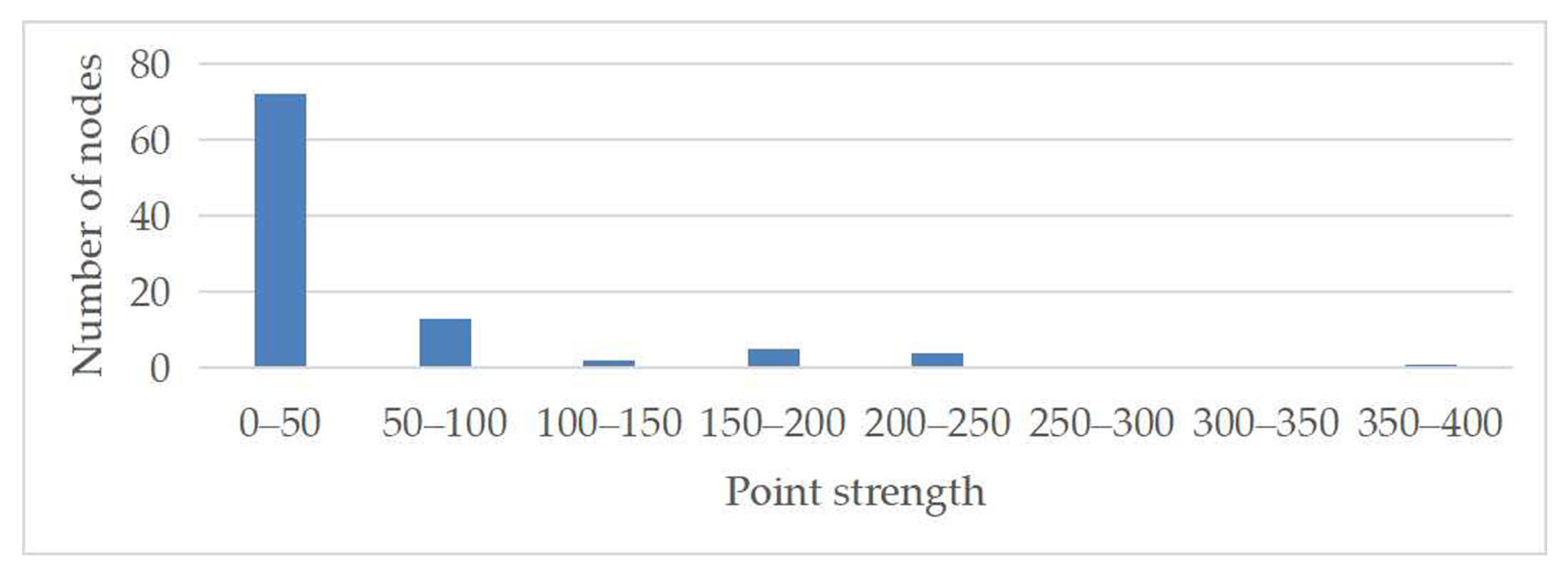
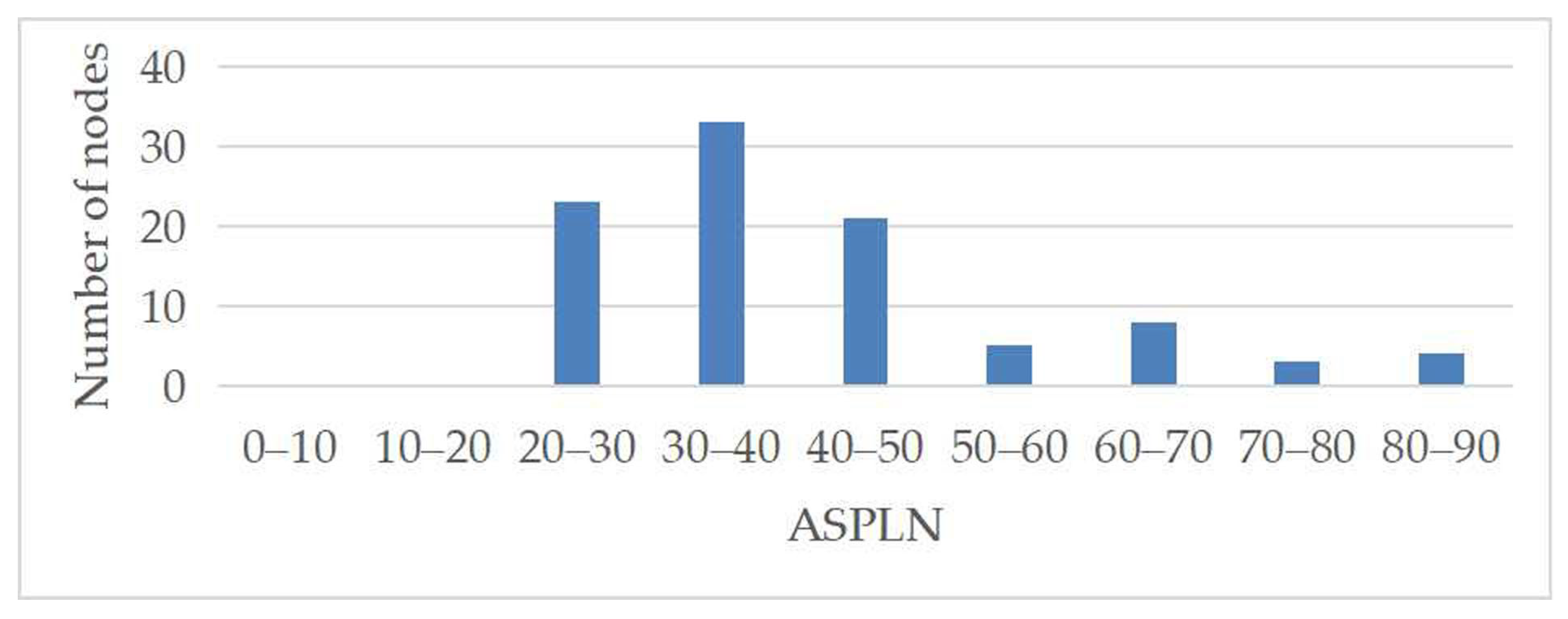
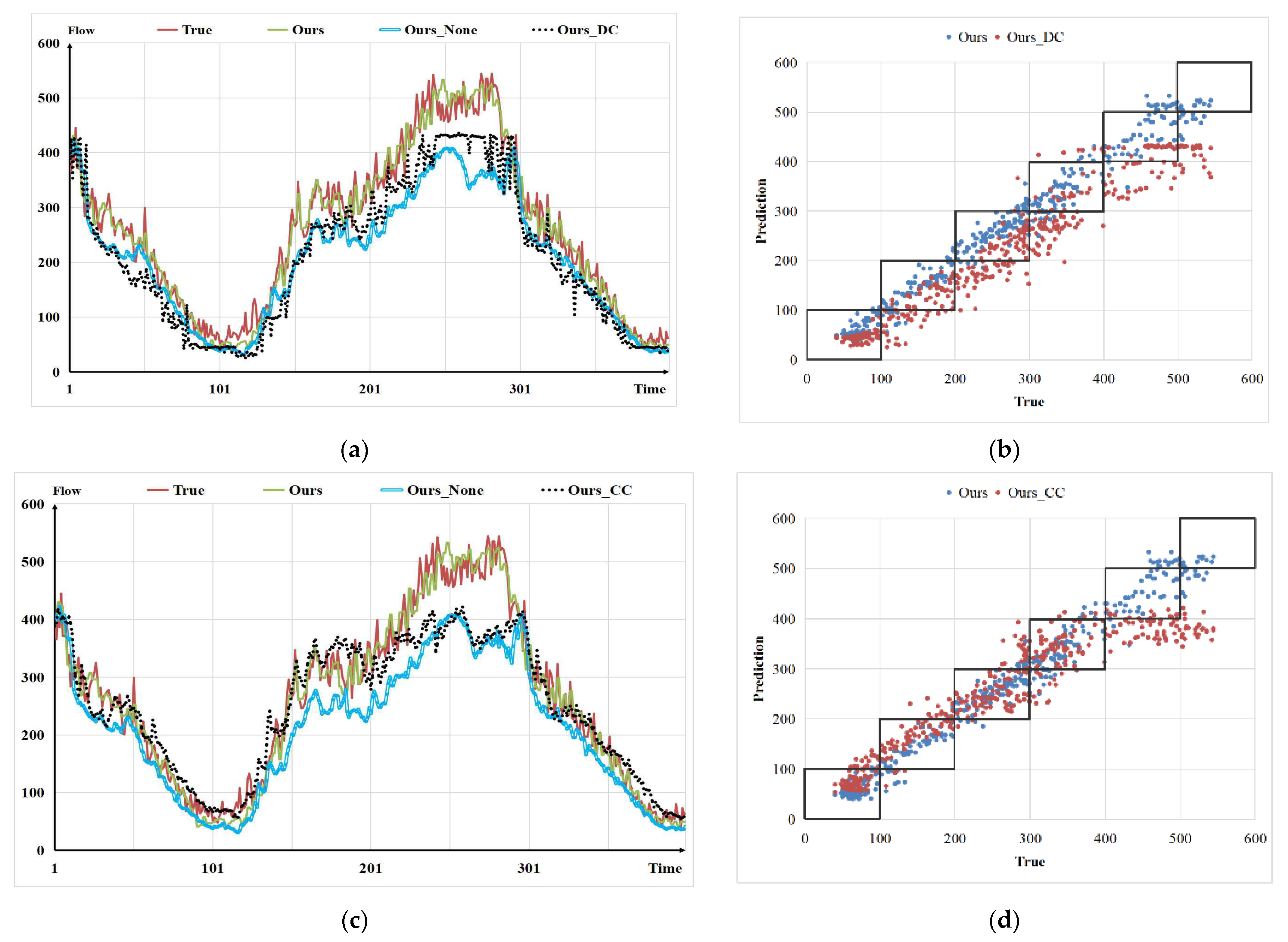
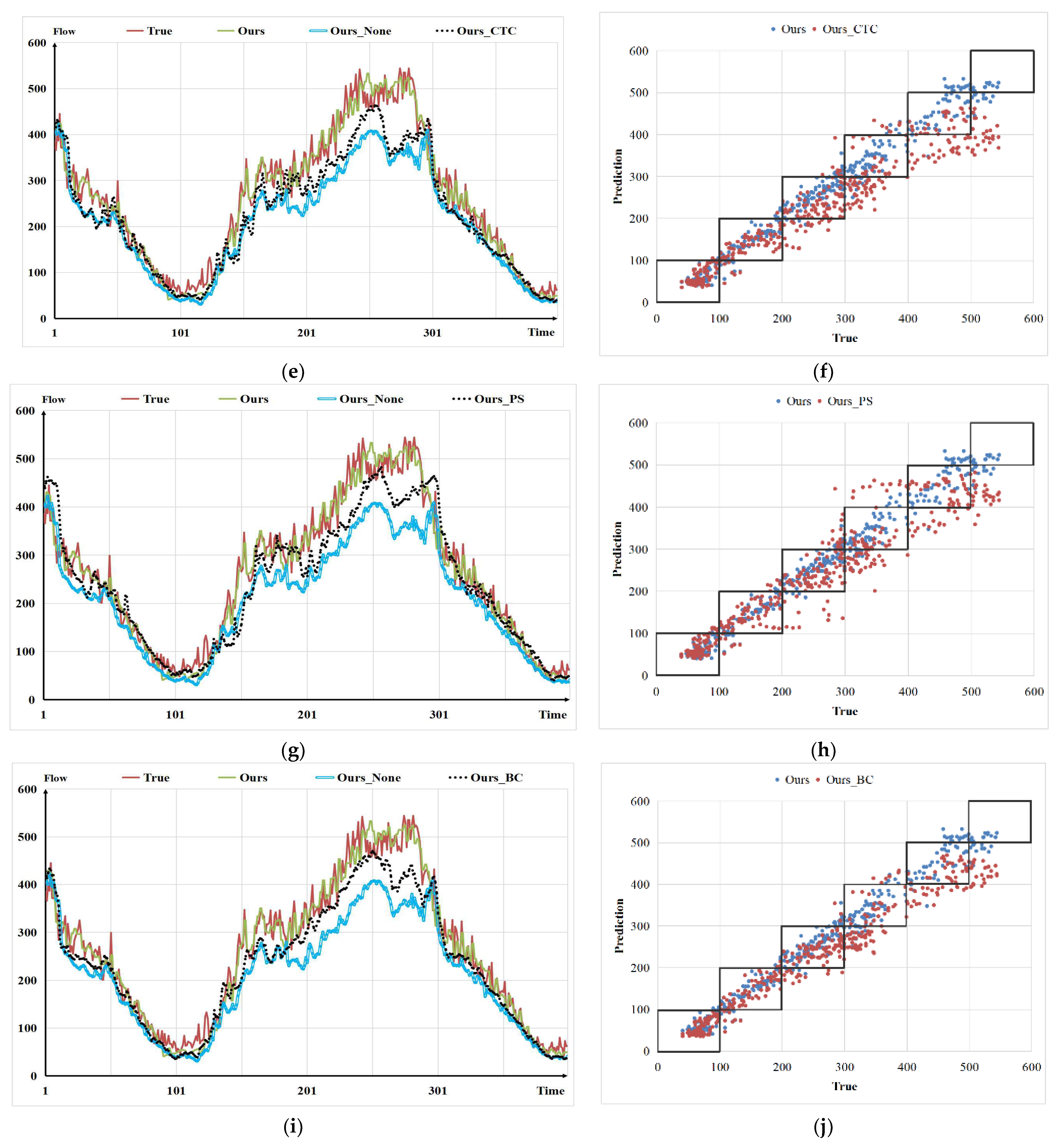
In addition, the ablation experiments results show that models only incorporating one network feature have traffic flow data prediction errors. Among them, the prediction performance of the model that only includes the average shortest node path length is the worst. The average node path length only contains part of the node distance information and has little influence on spatial correlation analysis. Furthermore, the model that only includes the clustering coefficients performed poorly. Since traffic flow is typical non-European structure data, the clustering coefficient cannot fully analyze the spatial characteristics of traffic flow data. Node degree centrality can effectively enhance node-related information and reduce model prediction errors. However, it lacks any analysis of global node correlations. The node degree reflects the node network structure characteristics, and the point strength adds the weight information of the node-related edges to the degree value. Consequently, the node characteristics reflected by the point strength are more accurate and comprehensive than the degree value. The addition of closeness centrality to the model effectively improves the global node correlation analysis, which helps improve the model’s effectiveness. Betweenness centrality can fully represent the node connectivity and the addition of betweenness centrality to the model effectively improves the model prediction effect. In summary, the prediction results of the model combining the six complex network features can accurately fit the changes in real traffic flow data.
Finally, there are numerous specific application scenarios for this work. For example, Australia’s most populated city, Sydney, in New South Wales, plans to spend millions of dollars to strengthen the monitoring and management of the region’s road networks. The program called for Cubic to provide an intelligent traffic congestion management program, an operational example of a predictive analytics application. Sydney will utilize a data-driven model and management platform to predict traffic flow, reduce congestion, and respond to emergency traffic incidents on time. By the end of 2020, when the plan is complete, it will be the first city in the world to manage its transport network based on predictive analytical models. Despite the high level of complexity, predictive models are easily scalable. In other words, while the initial time and resource investment to build the base model are substantial, once completed, the model can be applied to cities, incrementally improving the quality of urban life.
6. Conclusions and Future Work
Complex network theory, as a new tool for graph structure data analysis, can deeply analyze and mine the spatial relationships of monitoring stations. In this paper, we firstly established a traffic complex network model by using traffic big data, then analyzed the topological features of the traffic road network via complex network theory, and finally combined the topological features with a graph neural network to explore the role of topological features in traffic flow prediction. Six complex network properties are discussed, namely, degree centrality, clustering coefficient, betweenness centrality, closeness centrality, point strength, and average shortest path length. In this paper, we improve the graph convolutional neural network based on the above six complex network properties and propose a graph spatial–temporal network that combines several complex network properties. By comparing with existing graph convolutional neural network baselines, it is verified that GSTNCNI has high accuracy and robustness in traffic flow prediction. In addition, ablation experiments are conducted on six different complex network features to verify the impact of different complex network features on the model’s prediction accuracy. The experimental analysis shows that a model incorporating multiple complex network features has a more accurate prediction than a model incorporating only one complex network characteristic. The six complex network features analyzed in this paper can be divided into two main parts: locally relevant complex network features and globally relevant complex network features. Incorporating multiple complex network features can fully analyze local node correlation and global network correlation, which significantly improves the model prediction accuracy.
Although GSTNCNI can make accurate traffic flow data predictions, there are still several areas that can be improved. Firstly, the traffic data variation is not only affected by spatial and temporal correlation, but also by external influences, such as weather and holidays. Secondly, most graph neural networks are constructed based on static graphs, lacking the dynamic analysis of complex networks. Finally, existing models are based on short-term traffic data prediction and lack long-term data prediction ability. Consequently, we will continue to improve the related work. On the one hand, we consider the influence of external influencing factors on the model prediction effect, and on the other, we improve the model’s long-term data prediction accuracy. Thus, traffic prediction tasks can be completed accurately and efficiently, providing a scientific basis for the rational planning of traffic routes while improving travel efficiency.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}