In the actual working environment, the sorting algorithm usually needs to sort hundreds or thousands of radiation source signals simultaneously. Although pre-sorting is carried out, dozens of radiation source signals still need to be sorted by the SDIF main sorting algorithm. By analyzing the workflow of the SDIF algorithm, it can be seen that the sorting principle of the algorithm for more than two radar signals is the same. Therefore, to simplify the analysis process while remaining general, the SDIF sorting algorithm for two radar signals is taken as an example to analyze the failure principle of SDIF sorting.
3.1.2. The Difference between the Center Values of Two Groups’ Radar Signals Is Greater than the Tolerance
When
, the following equations can be expressed according to Equation (7):
According to Equations (5) and (6), Equation (11) can be expressed:
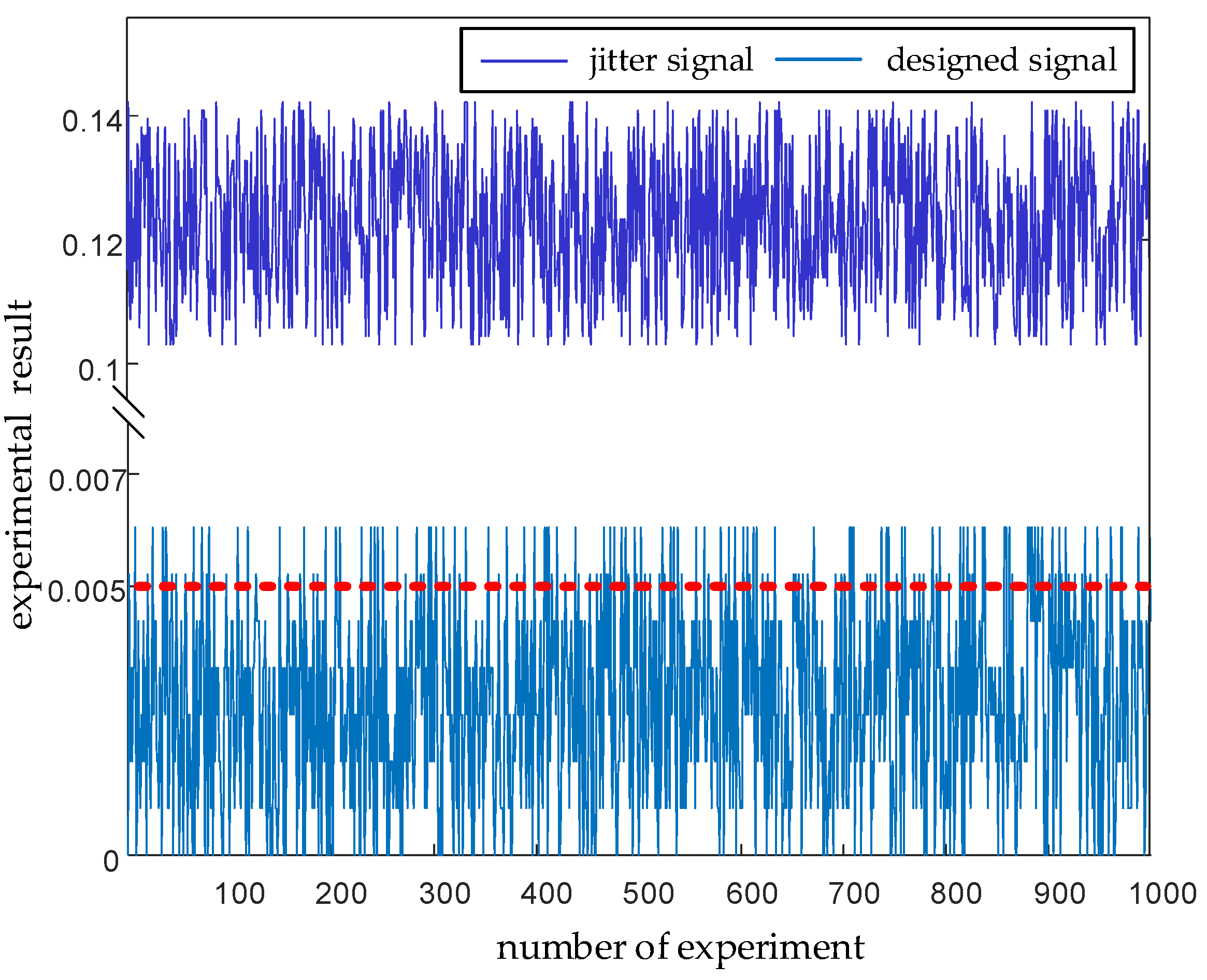
Essentially, different signal systems are manifested by the different sets and of the PRI variation of the signal. Therefore, PRI increment sets A and B are the main variables of Equation (12). Three cases are discussed by analyzing the composition of elements in sets and . ① The elements in sets and are all 0, and the signal is a fixed repetition signal. ② The elements in sets and are finite elements arranged repeatedly, and the signal is the jagged signal. In the special case, if the finite elements in sets and are arranged in an equal difference and repeated cyclically, the signal is a PRI slide signal. ③ The elements in sets A and B are pseudo-random code sequences or random sequences, and the signal is a random PRI signal. In the special case, if the elements in sets and are random sequences that obey a small interval distribution, the signal is a PRI jitter signal. Different situations are discussed as follows.
- ①
The elements of the signal PRI variation set are all 0
The elements in sets
and
are all 0, i.e., the PRI of the signal does not change, and it belongs to a fixed repetition signal. Therefore,
Equation (12) can be simplified as follows:
Under normal circumstances, the number of the sub-signals
M and
N of radar signals is not more than 10, and
M is approximately equal to
N. Therefore,
The sorting result for the signal is . From the perspective of sorting results, the sorting algorithm sorts two radars into one. However, the PRI value of the sorting result is between the two fixed PRIs, and the sum is within the same tolerance range. Combined with the tolerance range, the radar signal pulse can still be searched out, thus realizing signal sorting.
- ②
The elements of the signal PRI variation set are a finite sequence of values
The elements of the PRI variation set of the signal are cyclically repeated arrangements of finite elements, and the signal is a staggered signal. The PRI slide signal is the corresponding radar signal when the isometric sequence is arranged repeatedly. Under normal circumstances, the number of the sub-signals
M and
N of radar signals is no more than 10, and the elements in the PRI variation set of signals are all less than 0.3 times of the signal center value. Therefore,
Combining Equations (11), (16) and (17) can obtain:
According to Equation (12), the sorting result is related to the size–scale relationship of the central value of the two radar signals.
- a
The center values of the two radar signals are in the same order of magnitude
Considering that the center values of the two radar signals are in the same order of magnitude,
Therefore, Equation (18) is transformed into:
The sorting results of the algorithm combined with Equations (10) and (20) are as follows:
According to the above analysis, when the PRI center values of two radar signals are in the same order of magnitude, the signal sorting result of the sorting algorithm is . Although the sorting algorithm sorts two radars into one, the PRI value of the sorting is within the PRI variation range of one of the radars. Electromagnetic attack weapons, such as anti-radiation missiles, can still take the sorting result as an important parameter to attack radars.
- b
The centers of the two radar signals are not in the same order of magnitude
Because the center values of the two radar signals are not in the same order of magnitude,
is usually about 10 times larger than
.
Equation (18) is transformed into:
By combining Equations (10) and (24), the sorting results of the SDIF algorithm are obtained.
To analyze the error of the sorting results more specifically, the repeated frequency slip signal is taken as an example, i.e., the elements in sets A and B are arithmetic sequences. Since
M and
N are no more than 10 under normal circumstances, the maximum value of the signal PRI of the first radar is:
The sorting error of the SDIF algorithm is:
It can be seen from Equation (25) that when the element in the change set of signal PRI is greater than 30%, the right half of Equation (25) cannot meet the approximation condition. Therefore, the element value in the variation set of signal PRI cannot exceed 30% of the central value.
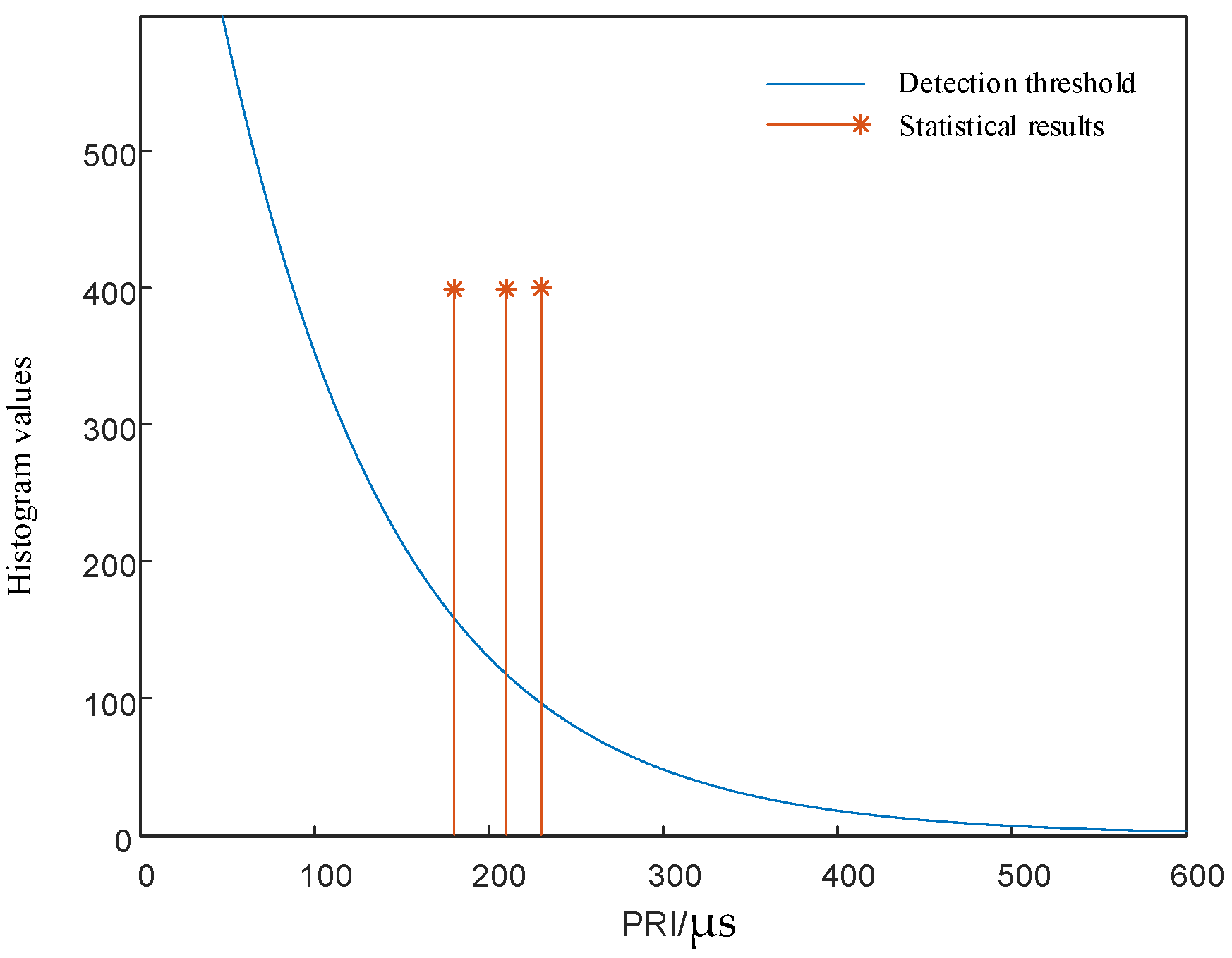
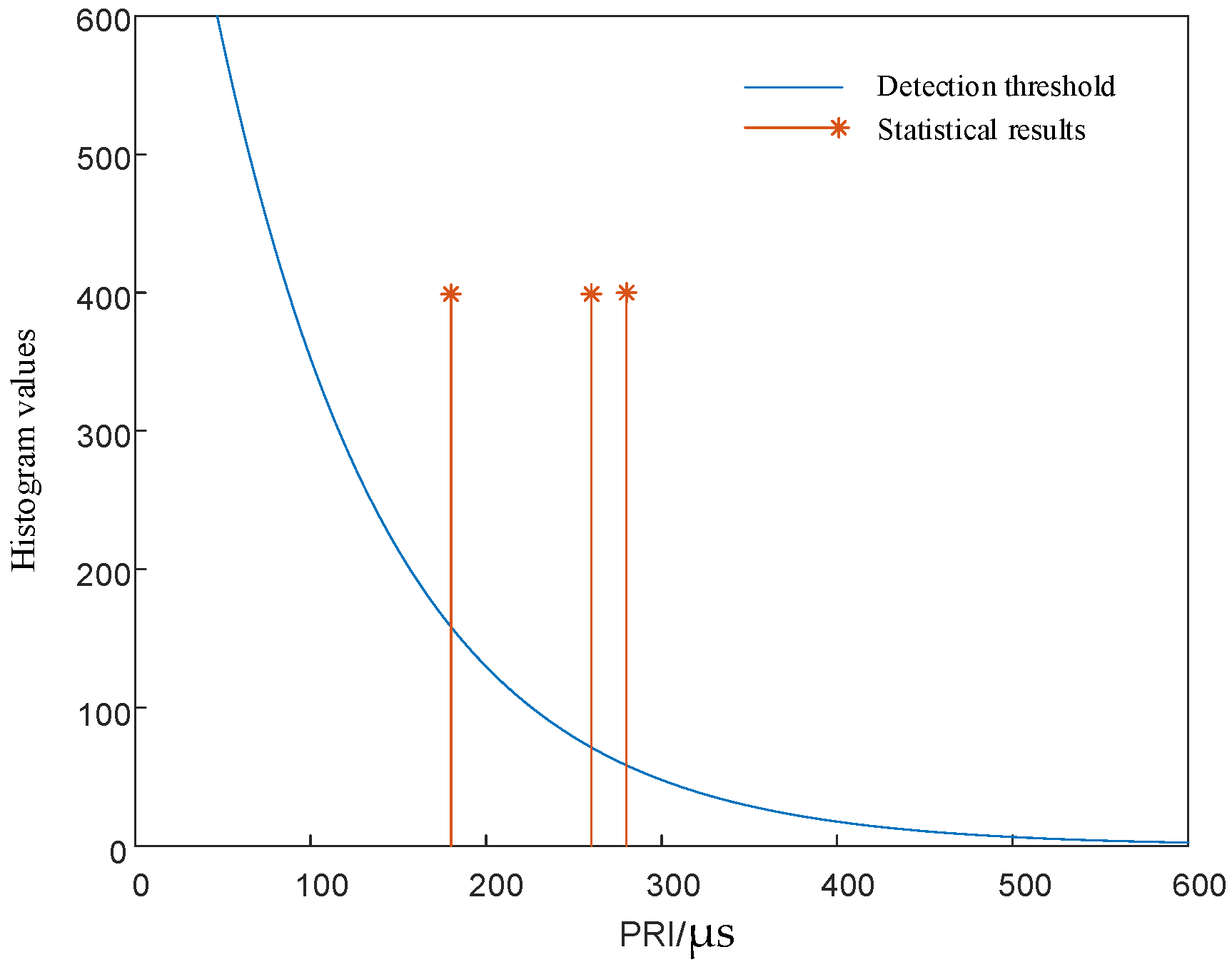
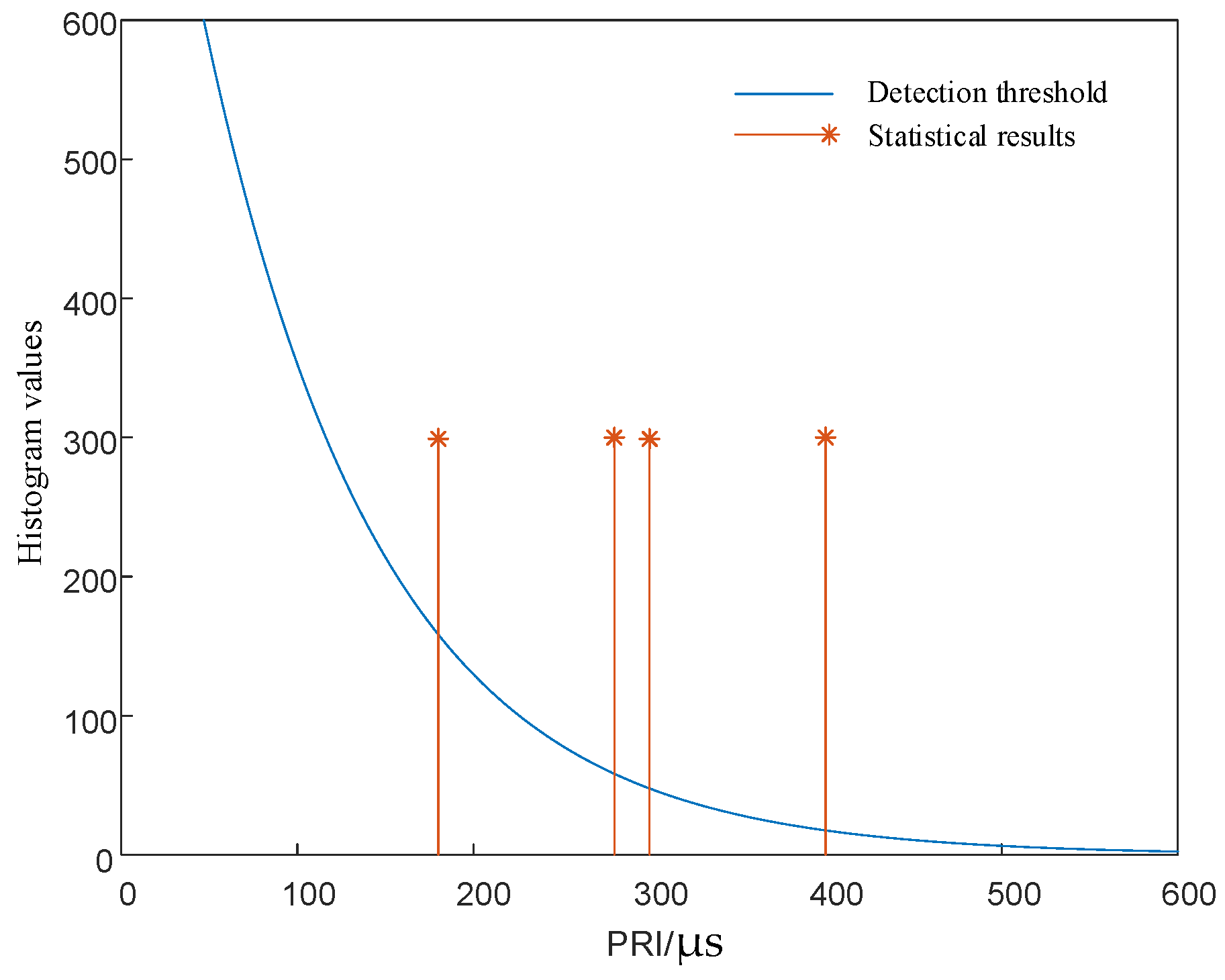
Through the above analysis, when the center values of the PRI of the two radar signals are not in the same order of magnitude, the output of the sorting algorithm is not in the PRI variation range of the transmitted signal. Moreover, the output of the sorting algorithm differs from the maximum PRI of the first radar signal by at least 25%. Wrong sorting results will directly lead to the failure of the electronic jamming system to jam the radar system and make the anti-radiation missile bind wrong parameters, which cannot attack the radar accurately and ensure the safe operation of the radar system.
- ③
Elements in the signal PRI variation set are random sequences
According to the previous derivation, the sorting results of signals are shown in Equation (15), which is rewritten as follows:
Under normal circumstances, the number of the sub-signals
M and
N of radar signals does not exceed 10, and the mean of the signal PRI
is less than 0.3 times the signal center value.
According to Equation (33), the sorting result is related to the relationship between the magnitude and scale of the center values of two radar signals. The next step is to distinguish the two cases in which the center values of two radar signals are in and not in the same order of magnitude. The derivation process is the same as that of Equations (19)–(27) in Step ②. Therefore, we do not repeat it here.
To sum up, no matter whether the signal PRI numerical sequence variation is limited or random, if two radar signal PRI values are within the tolerance range of the sorting algorithm, when the two signal center values are not in the same order of magnitude, the difference is more than 10 times, signal variation is within 30% of the center value, and sorting algorithm for radar signal sorting error is at least 25%. In this way, the radar signal cannot be accurately sorted and identified, which directly leads to the failure of the electronic jamming system to jam the radar system. The anti-radiation missile cannot carry out accurate attacks, which guarantees the safe operation of radar systems.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}