
Using Deep Learning Networks to Identify Cyber Attacks on Intrusion Detection for In-Vehicle Networks †


Abstract
:1. Introduction
- (i)
- The idea of machine learning-based IDS deployed to the CAN bus network was first introduced by Kang et al. in 2016 [13]. In this case, they used unsupervised pre-training of deep belief networks (DBN) model in detecting any deviations from normal frequencies of CAN message. Later, Taylor et al. used a support vector machine for binary classification to classify the CAN traffic flows [14]. Recently, Hossain et al. (2020) developed an LSTM to detect the threat predict using sequence data inputs and achieved an overall detection accuracy of 99.995% [7].
- (ii)
- In a supervised ML model, it requires complete labeled data in the training process. There are difficulties in predicting and generating attack behaviour in evaluating the CAN bus system [2]. Practically, existing signature-based approaches for the NIDS are based on behavioural features to categorize the threats [25]. Importantly, high accuracy of the OMIDS needs continuous updating for high-resolution feature set inputs extracted from attack scenarios of CAN bus, which is not a trivial task. Moreover, it cannot efficiently work if an unknown message is abnormal. Thus, the development of an accurate and robust approach for automatic threat detection for in-vehicle network systems is still a challenge.
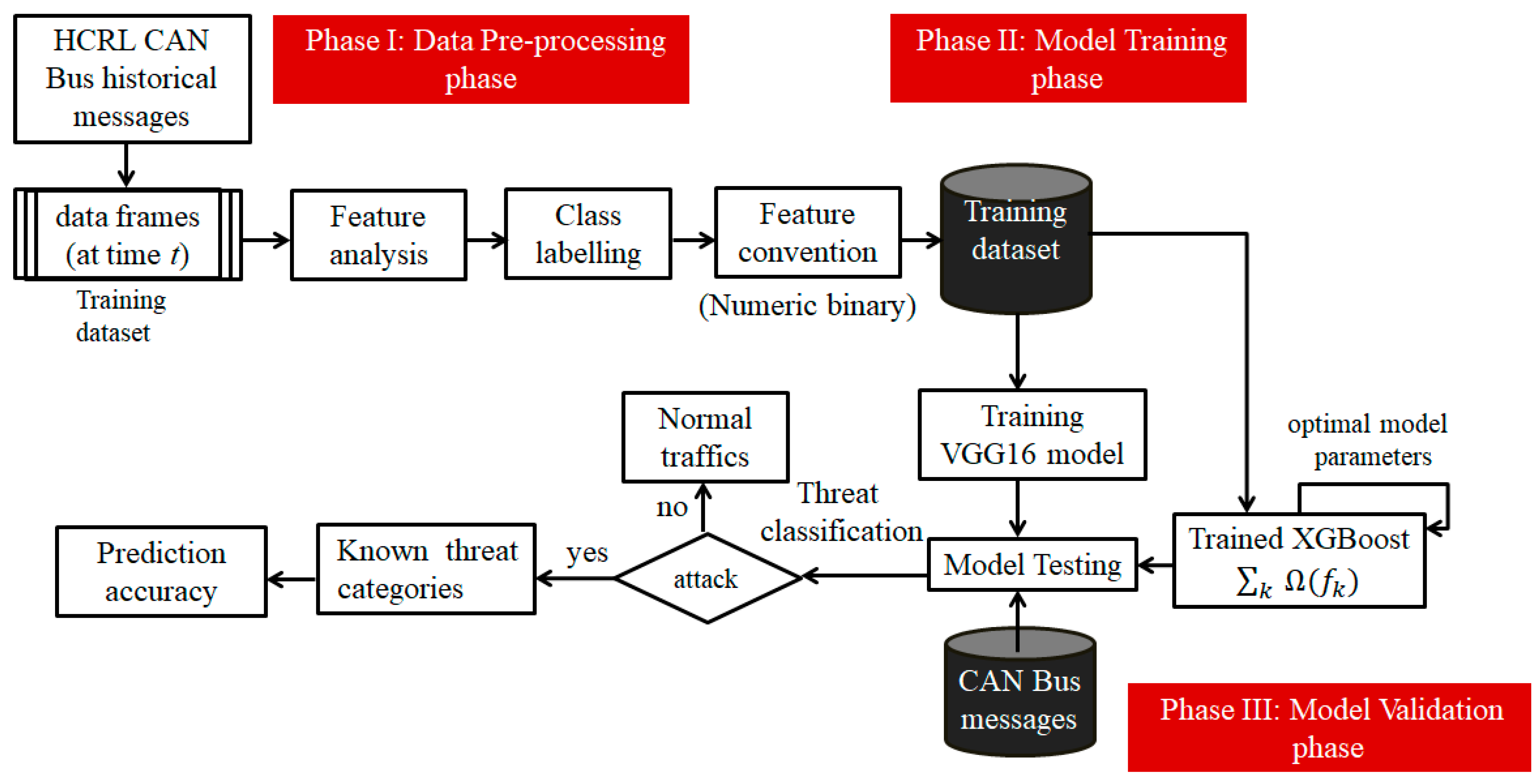
- For vehicle network security, this study addresses a diverse range of threat classification problems in intrusion detection systems using the VGG16 model to verify performance;
- In our experiment, the accuracy of the VGG16 model for intrusion detection is 100%/100% (Table 9) for binary classification on the training and testing data;
- As shown in Table 10, the proposed VGG16 approach provides higher prediction accuracy (97.9420%/97.8241%) for multiclass classification (five categories) than those of Naïve Bayes (91.0095%/91.0273%) and SVC classifier (91.0095%/91.4137%) on training and testing data;
- To compare the classification accuracy of competing approaches, including the XBoost classifier, Naïve Bayes classifier, DT, LR, and SVC, the test cases are capable of intrusion detection in terms of accuracy, precision, recall, and F1-score;
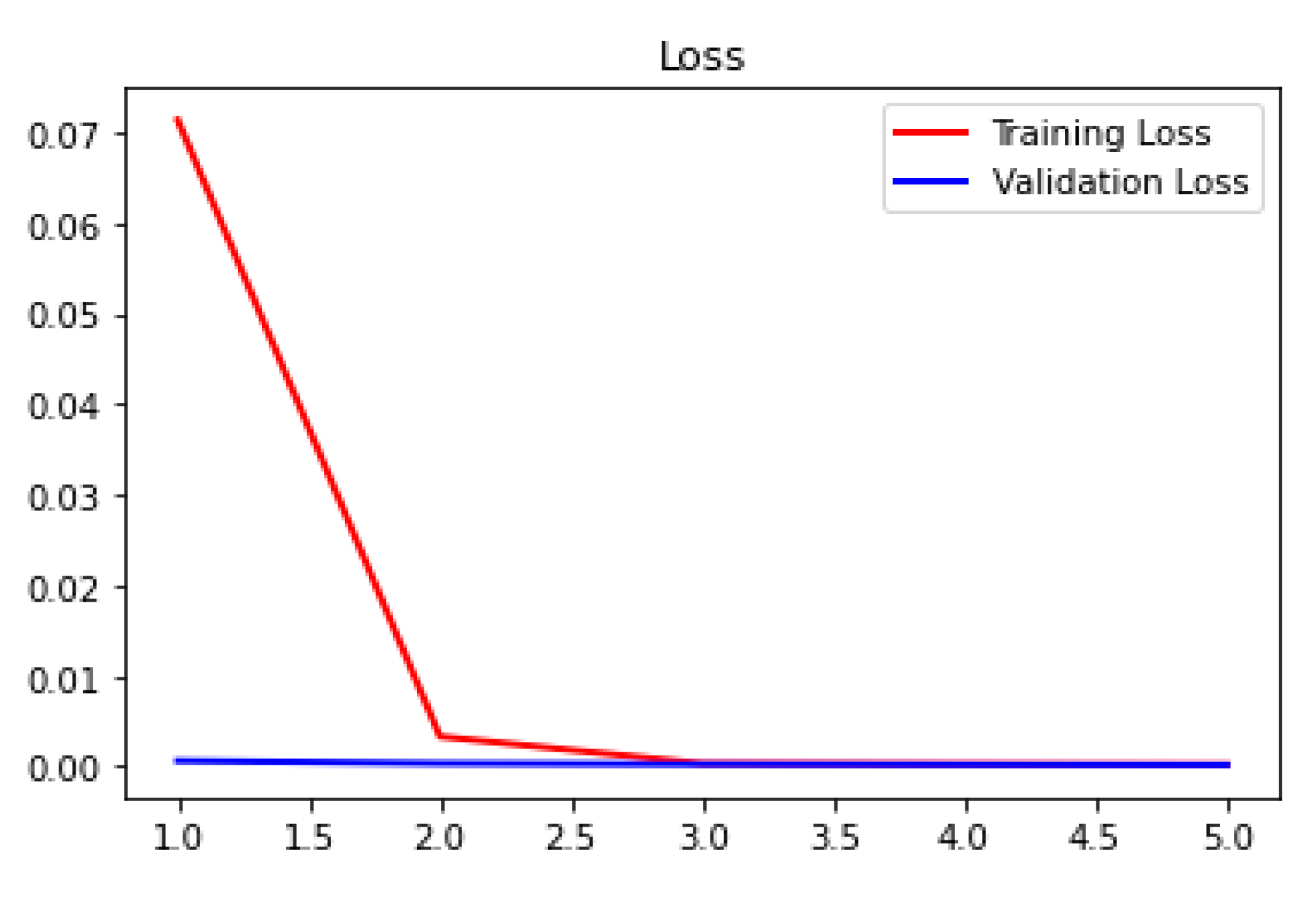
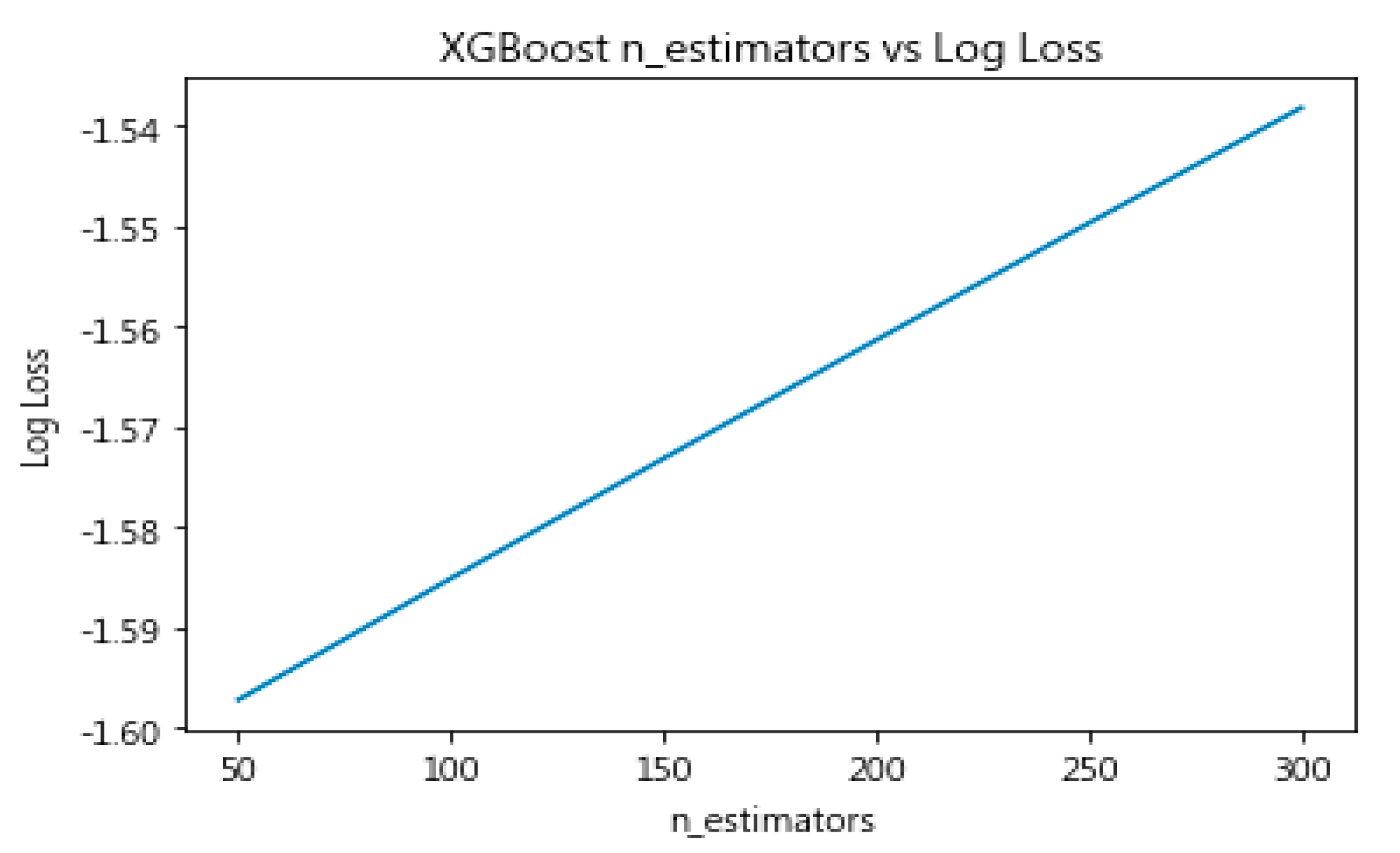
- In our experiment, the XBoost classifier’s prediction error for intrusion detection decreased most steadily among the four models, followed by the VGG16 model, naive Bayes, decision tree, logistic regression, and SVC;
- The average accuracy of the classification of intrusion detection by the VGG16 and XBoost classifiers (n = 50) for the testing data was 97.8241% and 99.9995%, respectively.
2. Overview of Intrusion Detection for In-Vehicle Network
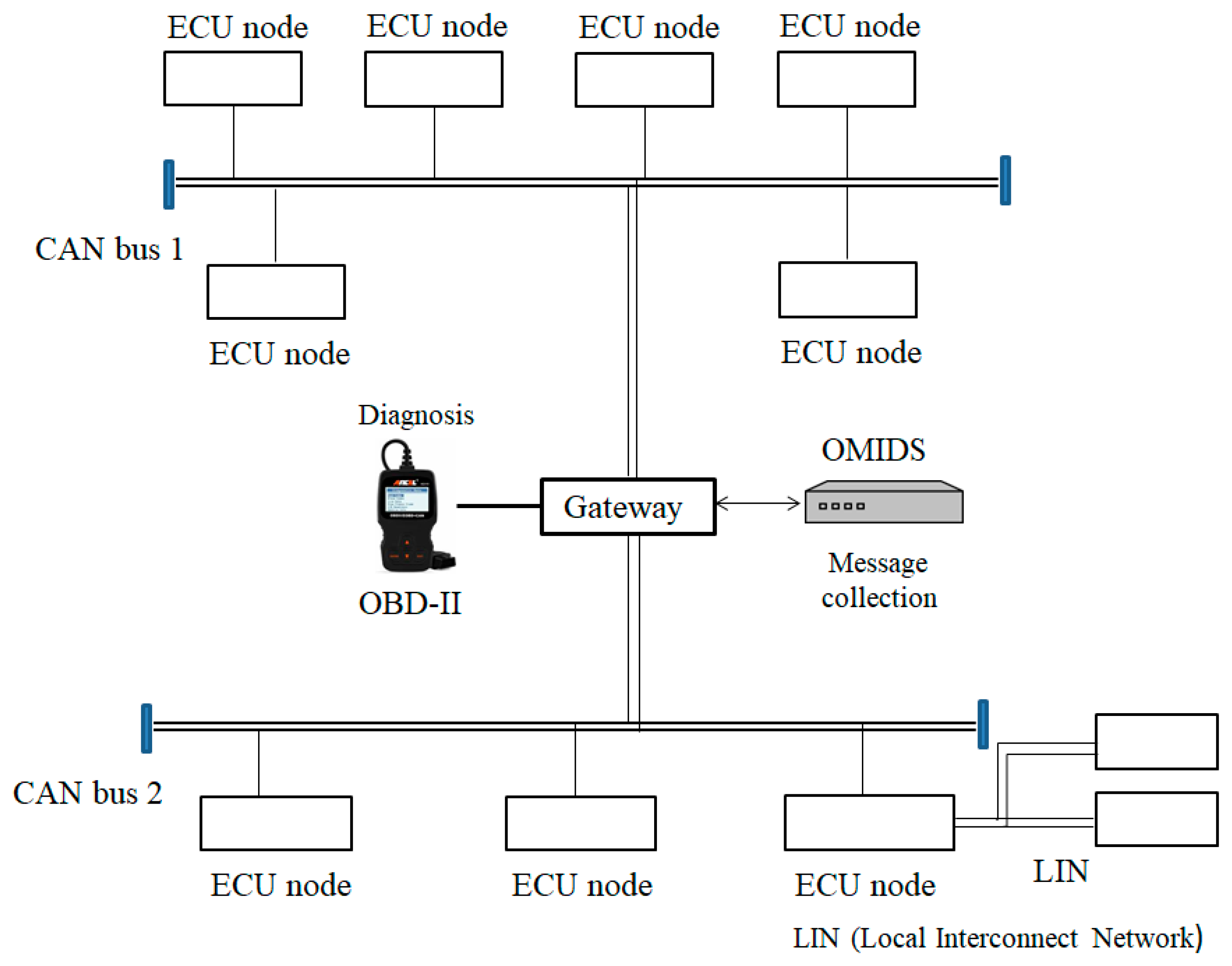
2.1. Potential Vulnerabilities for In-Vehicle Network
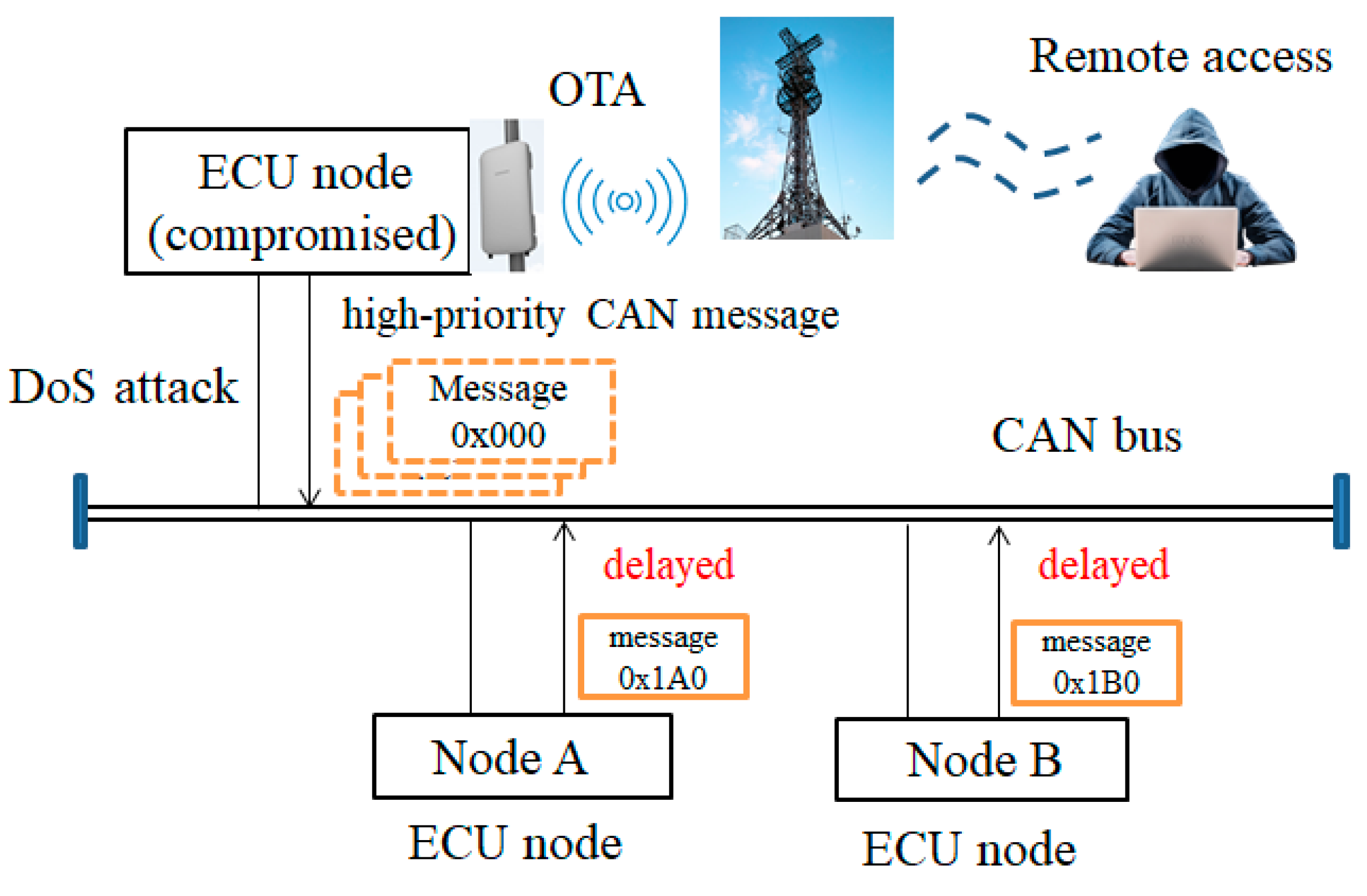
2.2. In-Vehicle Detection of Targeted CAN Bus Attacks
2.3. VGG16
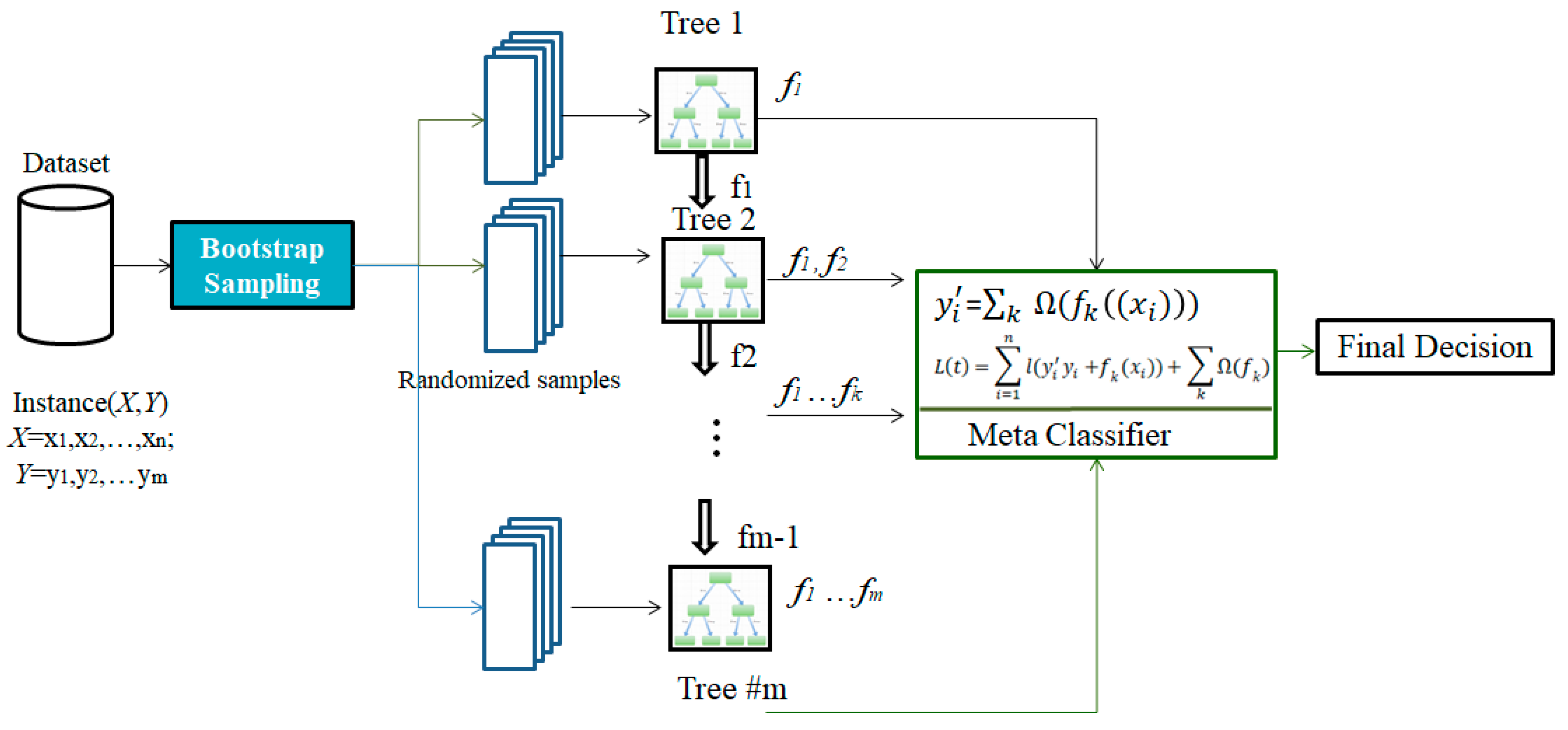
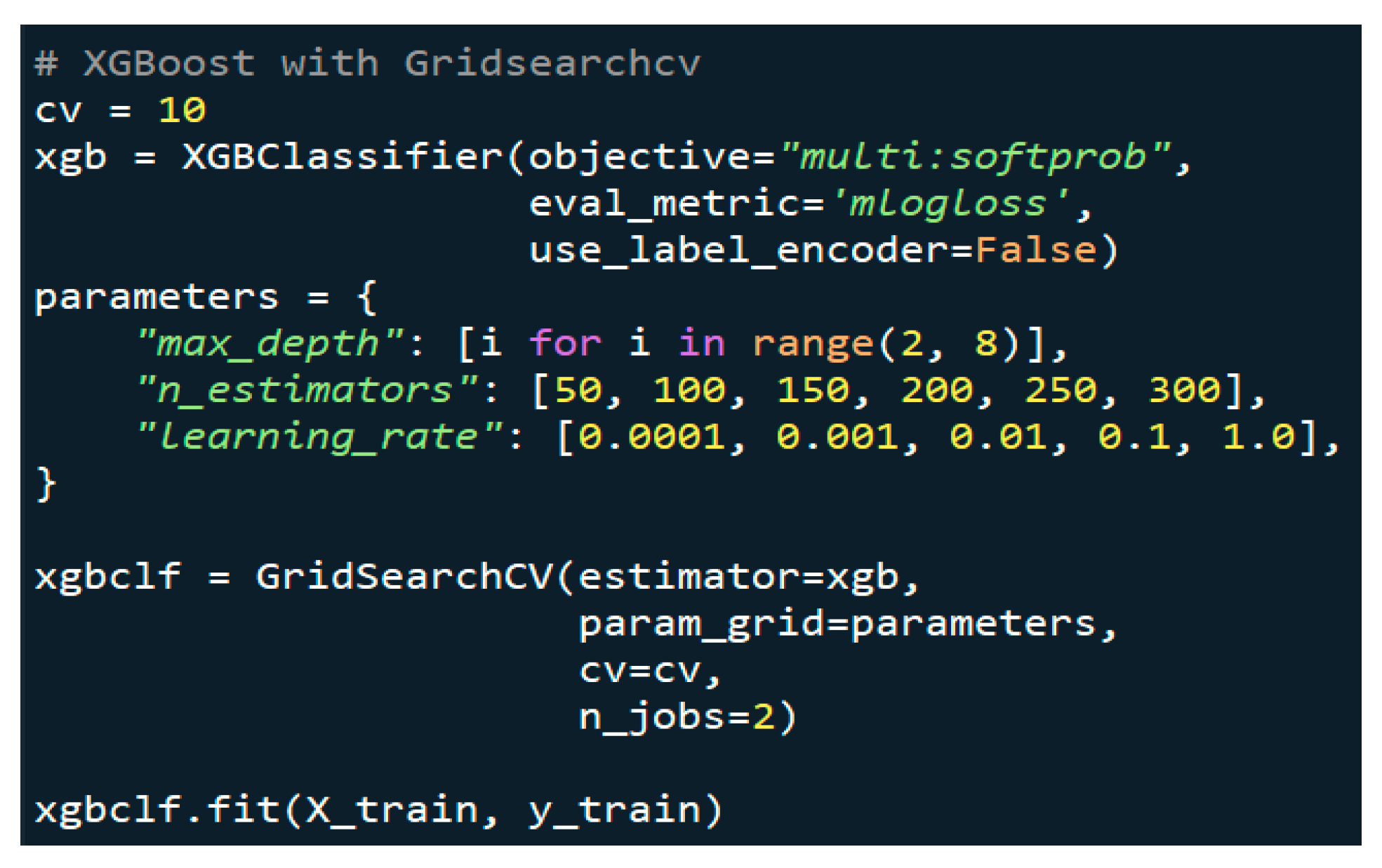
2.4. XGBoost Classifier
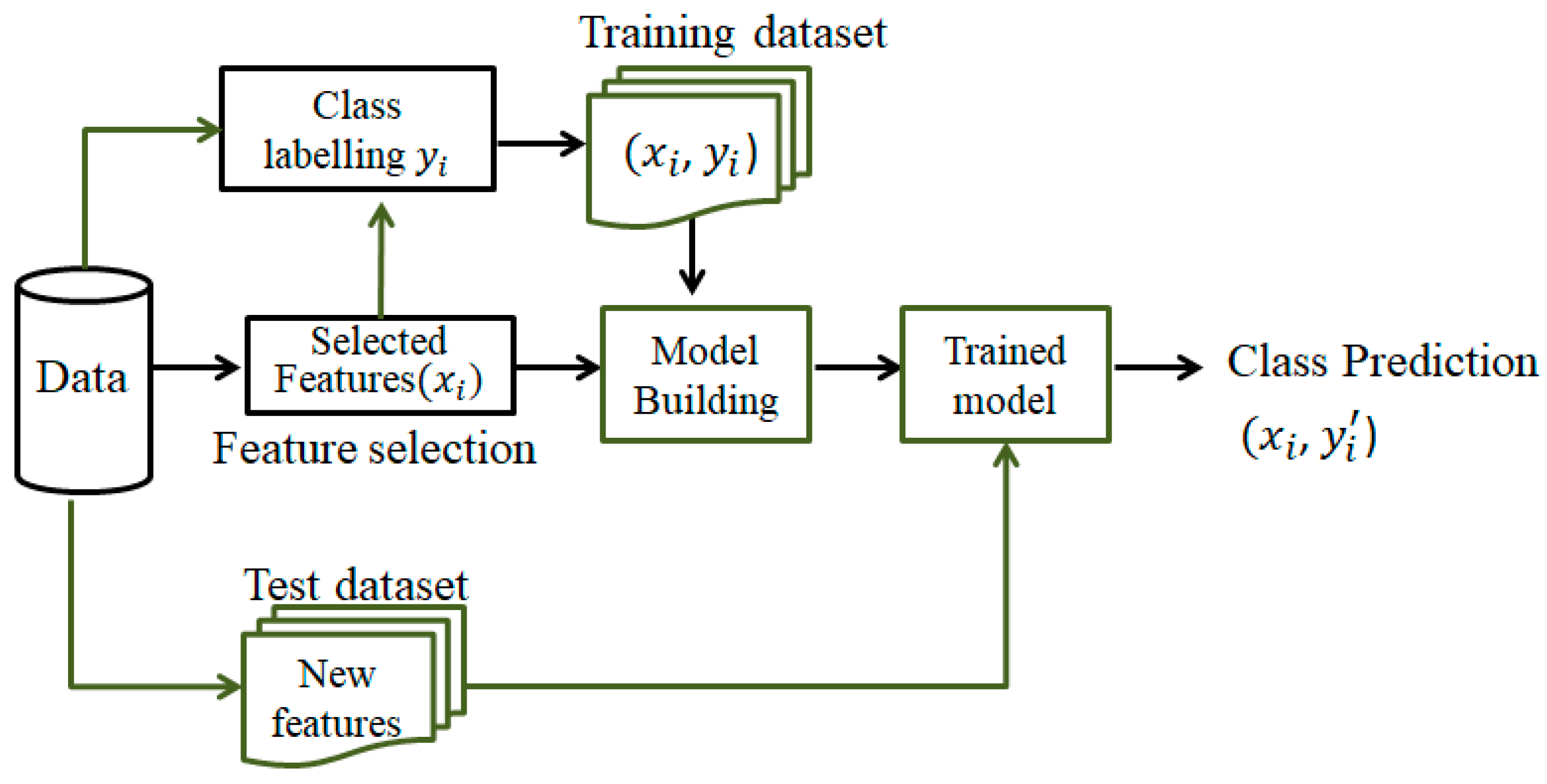
3. An Analysis Model for Intrusion Detection of an In-Vehicle Network
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fortune, the global Electric Vehicle Market Is Anticipated to Grow from $287.36 Billion in 2021 to $1318.22 Billion in 2028 at a CAGR of 24.3% in Forecast Period, Electric Vehicle. Available online: https://www.fortunebusinessinsights.com/industry-reports/electric-vehicle-market-101678 (accessed on 15 January 2021).
- Lokman, S.F.; Othman, A.T.; Abu-Bakar, M.-H. Intrusion Detection System for Automotive Controller Area Network (can) Bus System: A Review. EURASIP J. Wirel. Commun. Netw. 2019, 1, 184. [Google Scholar] [CrossRef] [Green Version]
- Han, M.L.; Kwak, B.I.; Kim, H.K. Anomaly intrusion detection method for vehicular networks based on survival analysis. Veh. Commun. 2018, 14, 52–63. [Google Scholar] [CrossRef]
- Hoppe, T.; Kiltz, S.; Dittmann, J. Applying intrusion detection to automotive it-early insights and remaining challenges. J. Inform. Assur. Secur. 2009, 4, 226–235. [Google Scholar]
- Apvrille, L.; El Khayari, R.; Henniger, O.; Roudier, Y.; Schweppe, H.; Seudié, H.; Weyl, B.; Wolf, M. Secure automotive on-board electronics network architecture. In Proceedings of the FISITA World Automotive Congress, Budapest, Hungary, 30 May–4 June 2010; Volume 8. [Google Scholar]
- Studnia, I.; Alata, E.; Nicomette, V.; Kaâniche, M.; Laarouchi, Y. A languagebased intrusion detection approach for automotive embedded networks. Int. J. Embed. Syst. 2018, 10, 1. [Google Scholar] [CrossRef] [Green Version]
- Hossain, M.D.; Inoue, H.; Ochiai, H.; Fall, D.; Kadobayashi, Y. LSTM-Based Intrusion Detection System for In-Vehicle Can Bus Communications. IEEE Access 2020, 8, 185489–185502. [Google Scholar] [CrossRef]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A Review of Recurrent Neural Networks: LSTM Cells and Network Architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef]
- Rehman, A.; Ur Rehman, S.; Khan, M.; Alazab, M.; Thippa, R.G. Canintelliids: Detecting In-vehicle Intrusion Attacks on A Controller Area Network Using CNN and Attention-based GRU. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1456–1466. [Google Scholar]
- Qassim, H.; Verma, A.; Feinzimer, D. Compressed Residual-VGG16 CNN Model for Big Data Places Image Recognition. In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 169–175. [Google Scholar]
- Zhang, H.; Gu, M.; Jiang, X.D.; Thompson, J.; Cai, H.; Paesani, S.; Santagati, R.; Laing, A.; Zhang, Y.; Yung, M.H.; et al. An Optical Neural Chip for Implementing Complex-valued Neural Network. Nat. Commun. 2021, 12, 457. [Google Scholar] [CrossRef]
- Zhu, H.H.; Zou, J.; Zhang, H.; Shi, Y.Z.; Luo, S.B.; Wang, N.; Cai, H.; Wan, L.X.; Wang, B.; Jiang, X.D.; et al. Space-efficient Optical Computing with an Integrated Chip Diffractive Neural Network. Nat. Commun. 2022, 13, 1044. [Google Scholar] [CrossRef]
- Kang, M.J.; Kang, J.W. Intrusion detection system using deep neural network for in-vehicle network security. PLoS ONE 2016, 11, e0155781. [Google Scholar] [CrossRef]
- Taylor, A.; Japkowicz, N.; Leblanc, S. Frequency-based anomaly detection for the automotive CAN bus. In Proceedings of the 2015 World Congress on Industrial Control Systems Security (WCICSS), London, UK, 14–16 December 2015; pp. 45–49. [Google Scholar]
- Song, H.M.; Woo, J.; Kim, H.K. In-vehicle network intrusion detection using deep convolutional neural network. Veh. Commun. 2020, 21, 100198. [Google Scholar] [CrossRef]
- Mahfouz, A.; Abuhussein, A.; Venugopal, D.; Shiva, S. Ensemble Classifiers for Network Intrusion Detection Using a Novel Network Attack Dataset. Future Internet 2020, 12, 180. [Google Scholar] [CrossRef]
- Rajadurai, H.; Gandhi, U.D. A stacked ensemble learning model for intrusion detection in wireless network. Neural Comput. Applic 2020, 1–9. [Google Scholar] [CrossRef]
- Rocca, J. Ensemble Methods: Bagging, Boosting and Stacking, towards Data Science, 23 April 2019. Available online: https://towardsdatascience.com/ensemble-methods-bagging-boosting-and-stacking-c9214a10a205 (accessed on 22 February 2021).
- Andy, L.; Matthew, W. Classification and Regression by Random Forest. R. News 2002, 2, 18. [Google Scholar]
- Gradient Boosting. Available online: https://wikipedia.org/wiki/Gradient%20boosting (accessed on 22 February 2021).
- Dhaliwal, S.S.; Al Nahid, A.; Abba, R. Effective Intrusion Detection System Using XGBoost. Information 2018, 9, 149. [Google Scholar] [CrossRef] [Green Version]
- Ha, N. TreeBoosting-03: Why does XGBoost Win Every Machine Learning Competition? Data Science Blog. Available online: https://datasciblog.github.io/2020/02/26/tree-boosting-03/ (accessed on 22 February 2021).
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Omer, S.; Lior, R. Approximating XGBoost with an interpretable decision tree. Inf. Sci. 2021, 572, 522–542. [Google Scholar]
- Singh, J.; Nene, M.J. A Survey on Machine Learning Techniques for Intrusion Detection Systems. Int. J. Adv. Res. Comput. Commun. Eng. 2013, 2, 4349–4355. [Google Scholar]
- Reuters, Hackers to Release Techniques for Attacking Toyota Prius, Ford Escape. 29 July 2013. Available online: https://www.wheels.ca/news/hackers-to-release-techniques-for-attacking-toyota-prius-ford-escape (accessed on 22 February 2021).
- Walker, M. Security Experts Reveal How a Tesla Model S Was Hacked, the Hollywood Report, 7 August 2015. Available online: https://www.hollywoodreporter.com/news/general-news/security-experts-reveal-how-a-814062/ (accessed on 15 January 2021).
- Le, V.H.; Hartog, J.; Zannone, N. Security and Privacy for Innovative Automotive Applications: A Survey. Comput. Commun. 2018, 132, 17–41. [Google Scholar] [CrossRef]
- Islam, R.; Refat, R.U.D.; Yerram, S.M.; Malik, H. Graph-based Intrusion Detection System for Controller Area Networks. IEEE Trans. Intell. Transp. Syst. 2020, 23, 21664787. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Precedence Research, Automotive Communication Technology Market Size, Report 2021–2030. Available online: https://www.precedenceresearch.com/automotive-communication-technology-market (accessed on 3 July 2022).
- HCRL Dataset. Available online: https://goo.gl/WiVeFj (accessed on 22 February 2021).
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-scale Image Recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Hassan, M.U. VGG16–Convolutional Network for Classification and Detection, 20 November 2018. Available online: https://neurohive.io/en/popular-networks/vgg16/ (accessed on 30 April 2019).
- Lee, H.; Whang, M. Heart Rate Estimated from Body Movements at Six Degrees of Freedom by Convolutional Neural Networks. Sensors 2018, 18, 1392. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gopalakrishnan, K.; Khaitan, S.; Agrawal, A. Deep Convolutional Neural Networks with Transfer Learning for Computer Vision-based Data-driven Pavement Distress Detection. Constr. Build. Mater. 2017, 157, 322–330. [Google Scholar] [CrossRef]
- Lin, H.C.; Wang, P.; Chao, K.M.; Lin, W.H.; Yang, Z.Y. Ensemble learning for threat classification in network intrusion detection on a renewable energy security monitoring system. Appl. Sci. 2021, 11, 11283. [Google Scholar] [CrossRef]
- Wu, J.; Chen, X.Y.; Zhang, H.; Xiong, L.D.; Lei, H.; Deng, S.H. Hyperparameter optimization for machine learning models based on Bayesian optimization. J. Electron. Sci. Technol. 2019, 17, 26–40. [Google Scholar]
- Seo, E.; Song, H.M.; Kim, H.K. GIDS: GAN Based Intrusion Detection System for In-vehicle Network. In Proceedings of the 2018 16th IEEE Annual Conference on Privacy, Security and Trust (PST), Belfast, Ireland, 28–30 August 2018. [Google Scholar]
- Verma, M.E.; Iannacone, M.D.; Bridges, R.A.; Hollifield, S.C.; Moriano, P.; Kay, B.; Combs, F.L. Addressing the Lack of Comparability & Testing in CAN Intrusion Detection Research: A Comprehensive Guide to CAN IDS Data & Introduction of the Road Dataset. arXiv 2012, arXiv:2012.14600. [Google Scholar]
- Ramon, J. Comment on: How to Determine the Number of Trees to Be Generated in Random Forest Algorithm. Available online: https://www.researchgate.net/post/How_to_determine_the_number_of_trees_to_be_generated_in_Random_Forest_algorithm (accessed on 12 September 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Results/Countermeasures | |
|---|---|---|
| DoS | Typically, DoS attacks are prepared by injecting high-priority CAN messages in a short cycle. | As the ECU that attempts to send a message with the most dominant CAN ID always wins the bus in the arbitration phase, other ECUs are prevented from transmitting their messages. The agent and SVM were used to improve the detection precision of intrusive attacks for network intrusion detection (NID). |
| Fuzzers | The fuzzy attack is similar to the DoS attack; however, the CAN ID and data values of messages are entirely random. Generally, fuzzy attacks are used to learn how ECUs react to certain packet types. | Spoofed random CAN ID and data packets are rapidly inserted into the CAN bus, causing failure. IDS detects the fuzzy attacks based on the differences from the insertion attack, because the random ID might not appear benign. |
| Insertion attacks | The method inserts packets to the CAN bus with an arbitrary ID and data frame. Unlike the fuzzy attack, insertion attack packets feature truly arbitrary IDs and data frame. | The use of insertion attacks might cause the vehicle to malfunction. Indeed, it is difficult to detect insertion attacks due the true arbitration of ID and data frame. |
| Spoofing gear/RPM | The spoofing attack enabled us to deceive the original ECU and change the RPM (revolution per minute) gauge and drive gear on the instrument panel. | The spoofing attack enabled us to deceive the original ECU and change the RPM gauge and the drive gear on the instrument panel. |
| Hybrid attacks | This method interleaves benign data with DoS attacks, fuzzers, spoofing gear/RPM, and insertion attacks. | The use of hybrid attacks may cause serious malfunctions in vehicles. In the identification of possible attacks, defenders used IDS on the CAN bus to collect sufficient routing information to identify attack categories successfully in the optimal time. |
| Numerical and Machine Learning Library | |
|---|---|
| Python 3.8.10 | Tensor flow 2.1.0 |
| scikit-learn | |
| Numpy 1.21.5 | |
| scipy 1.0.1 | |
| Pandas 1.2.0 | |
| Attack Type | # of Injected Messages | # of Normal Messages | Total |
|---|---|---|---|
| DoS Attack | 587,521 (16.03%) | 3,078,250 (83.97%) | 3,665,771 (100.0%) |
| Fuzzy Attack | 491,847 (12.81%) | 3,347,013 (87.19%) | 3,838,860 (100.0%) |
| Gear Spoofing | 597,252 (13.44%) | 3,845,890 (86.56%) | 4,443,142 (100.0%) |
| RPM Spoofing | 654,897 (14.17%) | 3,966,805 (85.83%) | 4,621,702 (100.0%) |
| Attack Type | No. of Record | Message Details |
|---|---|---|
| Normal | 14,237,958(85.93%) | Normal CAN messages |
| DoS | 587,521(3.55%) | Inject the message with CAN ID of ‘0x000’ |
| Fuzzy | 491,847(2.97%) | Randomly inject deceptive messages with CAN ID and DATA |
| Gear Spoofing | 597,252(3.6%) | Inject the messages of imitating nodes with Arbitrary ID = ‘0x43f’ |
| RPM Spoofing | 654,897(3.95%) | Inject the messages of imitating nodes with Arbitrary ID = ‘0x316’ |
| Total | 16,569,475(100%) |
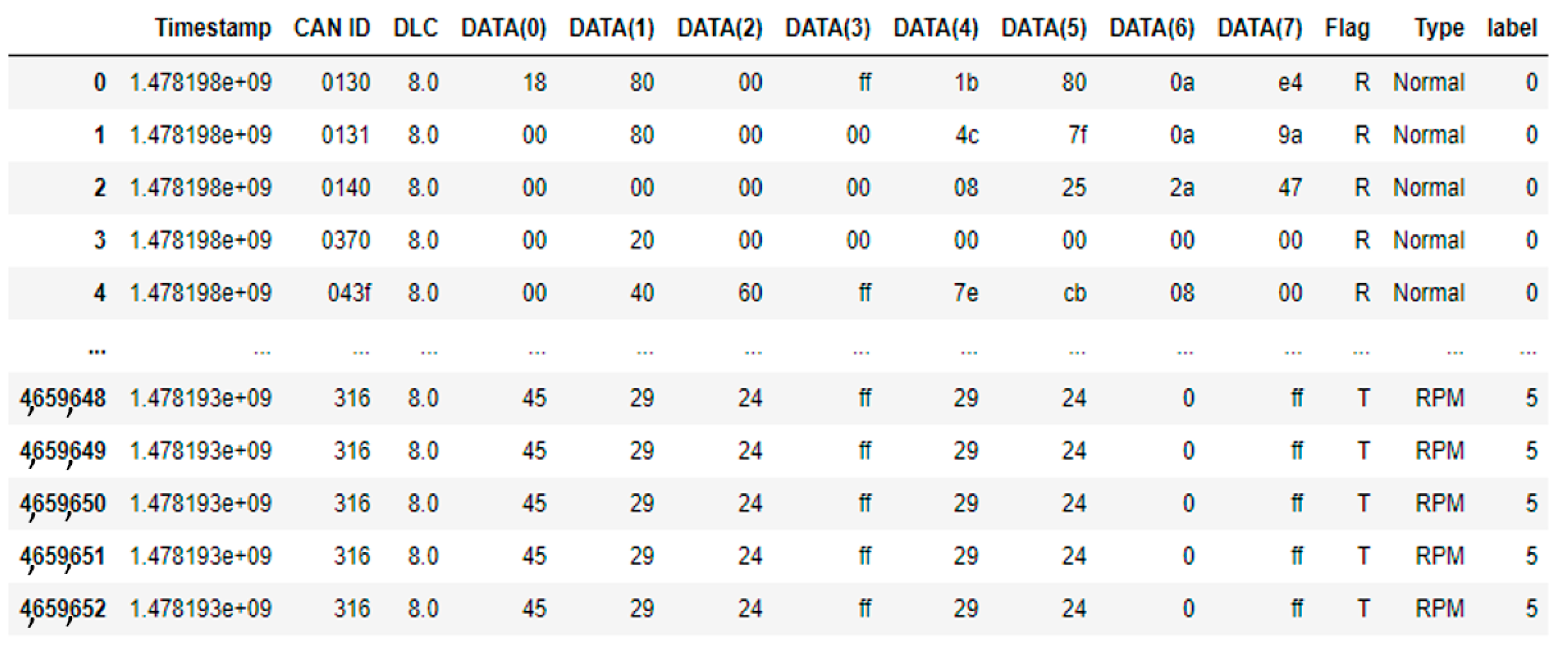
| Field | Description of CAN Message |
|---|---|
| Timestamp | recorded time (s) |
| CAN ID | identifier of CAN message in HEX (ex. 043f) |
| DLC | number of data bytes, from 0 to 8 |
| DATA [0~7] | data value (byte) |
| Flag | T or R, where ‘T’ represents injected special attack messages while ‘R’ represents normal messages |
| Layer | No. of Filter | Filter Size | Feature Map Generated |
|---|---|---|---|
| Convolution layer C1 | 64 | 3 × 3 × 3 | 150 × 150 × 64 |
| Pooling layer P1 | 1 | 2 × 2 | 75 × 75 × 64 |
| Convolution layer C2 | 128 | 3 × 3 × 64 | 150 × 150 × 128 |
| Pooling layer P2 | 1 | 2 × 2 | 37 × 37 × 128 |
| Convolution layer C3 | 256 | 3 × 3 × 128 | 37 × 37 × 256 |
| Pooling layer P3 | 1 | 2 × 2 | 18 × 18 × 256 |
| Convolution layer C4 | 512 | 3 × 3 × 256 | 18 × 18 × 512 |
| Pooling layer P4 | 1 | 2 × 2 | 9 × 9 × 512 |
| Convolution layer C5 | 512 | 3 × 3 × 512 | 9 × 9 × 512 |
| Pooling layer P6 (Max) | 1 | 2 × 2 | 4 × 4 × 512 |
| Pooling layer P7 (Avg) | 1 | 2 × 2 | 512 |
| Dense (256) | - | - | 256 |
| Dropout (rate = 0.5) | - | - | 256 |
| Classification (Softmax) | - | - | 2 for binary classification 5 for multi-classification |
| Accuracy (%) | Precision (%) | Recall (%) | F1 Score (%) | Training Time (s) |
|---|---|---|---|---|
| 100.0 | 100.0 | 100.0 | 100.0 | 389 sec |
| Parameter | n-Estimators | Max-Depth | Learning Rate | Optimizer | |
|---|---|---|---|---|---|
| Model | |||||
| XGBoost | [50, 100, 150, 200, 250, 300] | [4, 5, 6, 7, 8] | 0.0001 | Negative Log Likelihood Loss | |
| Accuracy (%) | Precision (%) | Recall (%) | F1 Score (%) | ROC AUC (%) | |
|---|---|---|---|---|---|
| n = 50 | 99.7880 | 99.9480 | 98.5739 | 99.2347 | 99.7084 |
| n = 100 | 99.7881 | 99.9480 | 98.5745 | 99.2350 | 99.7084 |
| n = 150 | 99.7881 | 99.9480 | 98.5745 | 99.2350 | 99.7084 |
| n = 200 | 99.6991 | 99.9284 | 97.9733 | 98.8968 | 99.9450 |
| n = 250 | 99.7888 | 99.9482 | 98.5790 | 99.2375 | 99.7084 |
| n = 300 | 99.7888 | 99.9482 | 98.5790 | 99.2375 | 99.7084 |
| Training | Testing | |
|---|---|---|
| VGG16 | 100.0% | 100.0% |
| Naïve Bayes | 100.0% | 100.0% |
| CART | 100.0% | 100.0% |
| Logistic Regression | 100.0% | 100.0% |
| SVC | 100.0% | 100.0% |
| XGBoost classifier | 100.0% | 100.0% |
| Training | Testing | |
|---|---|---|
| VGG16 | 97.9420% | 97.8241% |
| Naïve Bayes | 91.0095% | 91.0273% |
| CART | 99.3259% | 99.3170% |
| Logistic Regression | 99.3170% | 98.9261% |
| SVC | 91.0095% | 91.4137% |
| XGBoost classifier | 99.9997% | 99.9995% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, H.-C.; Wang, P.; Chao, K.-M.; Lin, W.-H.; Chen, J.-H. Using Deep Learning Networks to Identify Cyber Attacks on Intrusion Detection for In-Vehicle Networks. Electronics 2022, 11, 2180. https://doi.org/10.3390/electronics11142180
Lin H-C, Wang P, Chao K-M, Lin W-H, Chen J-H. Using Deep Learning Networks to Identify Cyber Attacks on Intrusion Detection for In-Vehicle Networks. Electronics. 2022; 11(14):2180. https://doi.org/10.3390/electronics11142180
Chicago/Turabian StyleLin, Hsiao-Chung, Ping Wang, Kuo-Ming Chao, Wen-Hui Lin, and Jia-Hong Chen. 2022. "Using Deep Learning Networks to Identify Cyber Attacks on Intrusion Detection for In-Vehicle Networks" Electronics 11, no. 14: 2180. https://doi.org/10.3390/electronics11142180