
Computational Resources Allocation and Vehicular Application Offloading in VEC Networks

Abstract
:1. Introduction
- We study vehicular application offloading in a VEC network system by jointly allocating computational resources of vehicles and the VEC servers. We try to minimize the consumed energy and time cost of executing the vehicle applications. We formulated the studied problem as an optimization problem.
- By analyzing the structure of the problem, we know that it is MINP and well-known as non-convex, which is NP-hard. The objective problem is solved by decomposing it into three subproblems. The optimal solution for each subproblem is obtained.
- Extensive simulation results are provided to prove that the proposed offloading strategy achieves better performances than the three benchmark algorithms.
2. Related Work
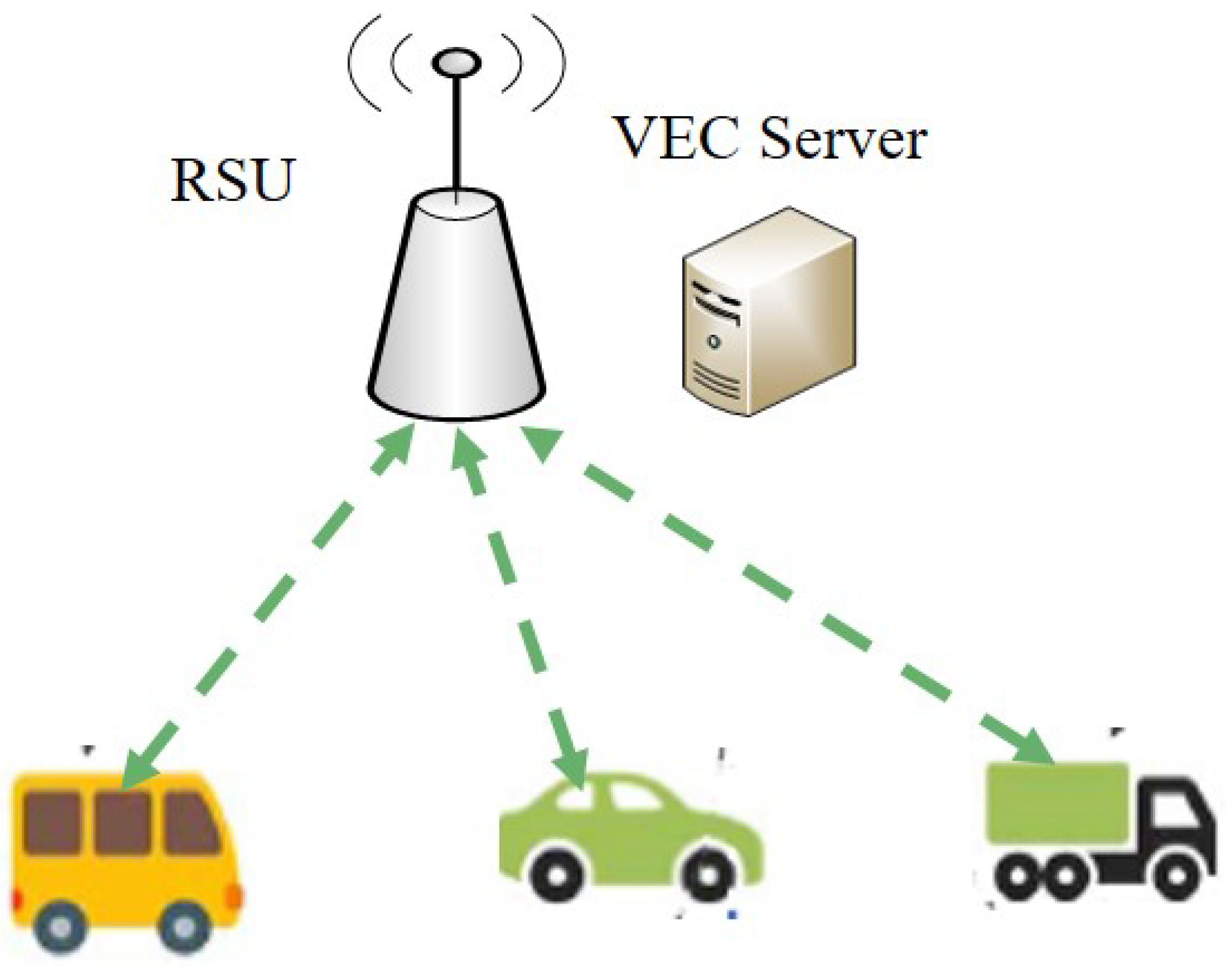
3. System Model and Problem Formulation
3.1. Local Execution
3.2. VEC Server Execution
3.3. Problem Formulation
4. Methodology
- (1)
- Local execution problem;
- (2)
- VEC server execution problem;
- (3)
- Vehicular application offloading strategy problem.
4.1. Local Execution Problem
4.2. VEC Server Execution Problem
4.3. Offloading Problem
| Algorithm 1 The Proposed Vehicular Application Offloading Algorithm |
| Input: |
| 1: N applications of vehicles; |
| Output: |
| 2: the computation resources allocation, vehicular application offloading strategy, and computation costs; |
| 3: Solving subproblem Problem2; |
| 4: Obtain the optimal allocated computational resource for each vehicle based on Equation (17); |
| 5: Calculate the minimum computation costs for each vehicle in the local execution problem according to Equation (18); |
| 6: Solving subproblem Problem3; |
| 7: Obtain the optimal allocated computational resources of the VEC server based on Equation (25); |
| 8: Obtain the minimum computation costs in the execution model of the VEC server execution problem from Equation (28); |
| 9: if then |
| 10: ; |
| 11: else |
| 12: ; |
| 13: end if |
5. Experimental Evaluation
5.1. Simulation Settings
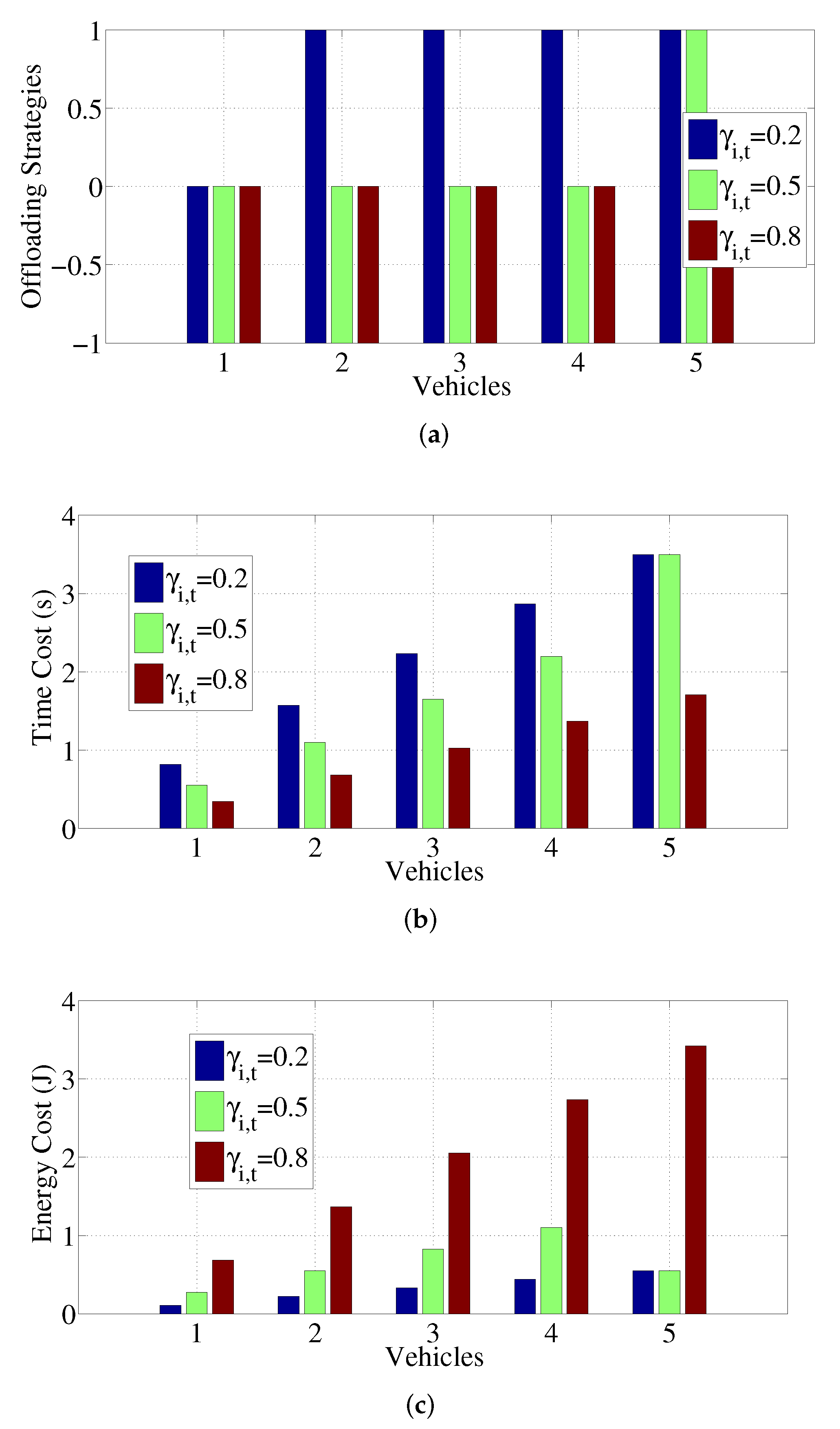
5.2. Impacts of the Values of Weighting Factor
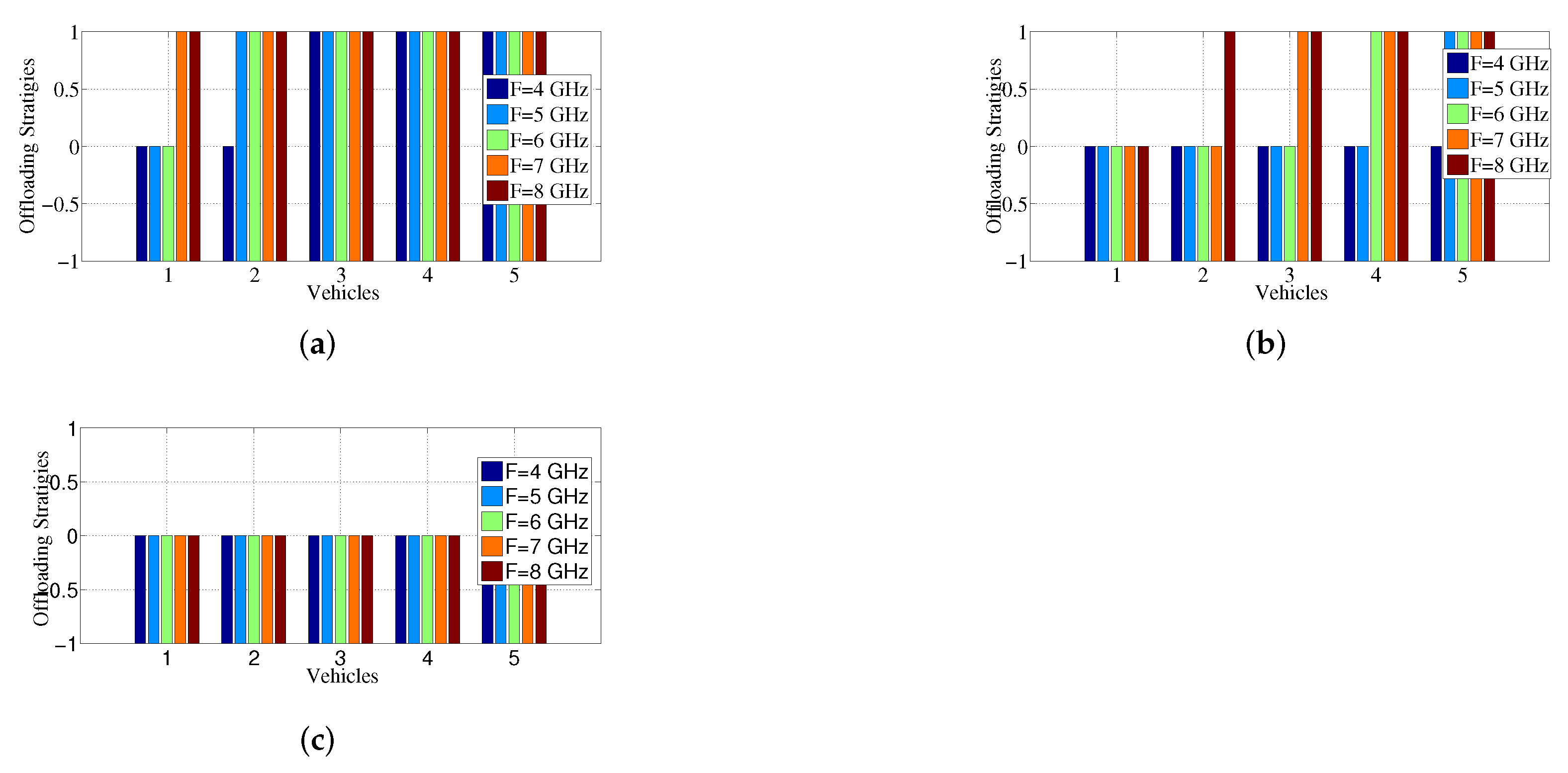
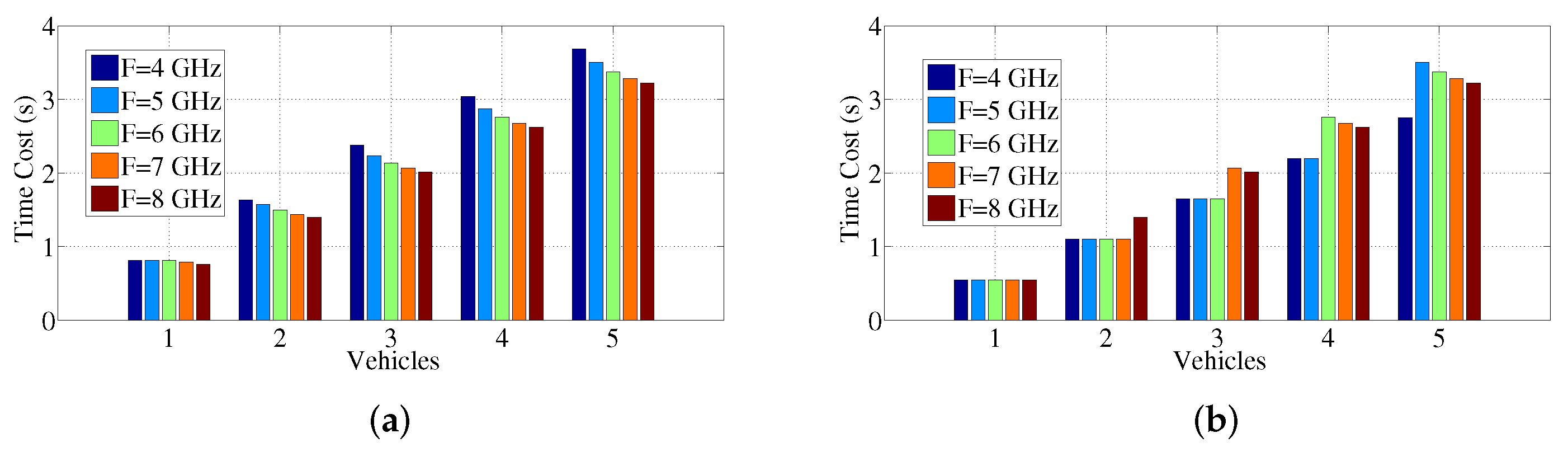
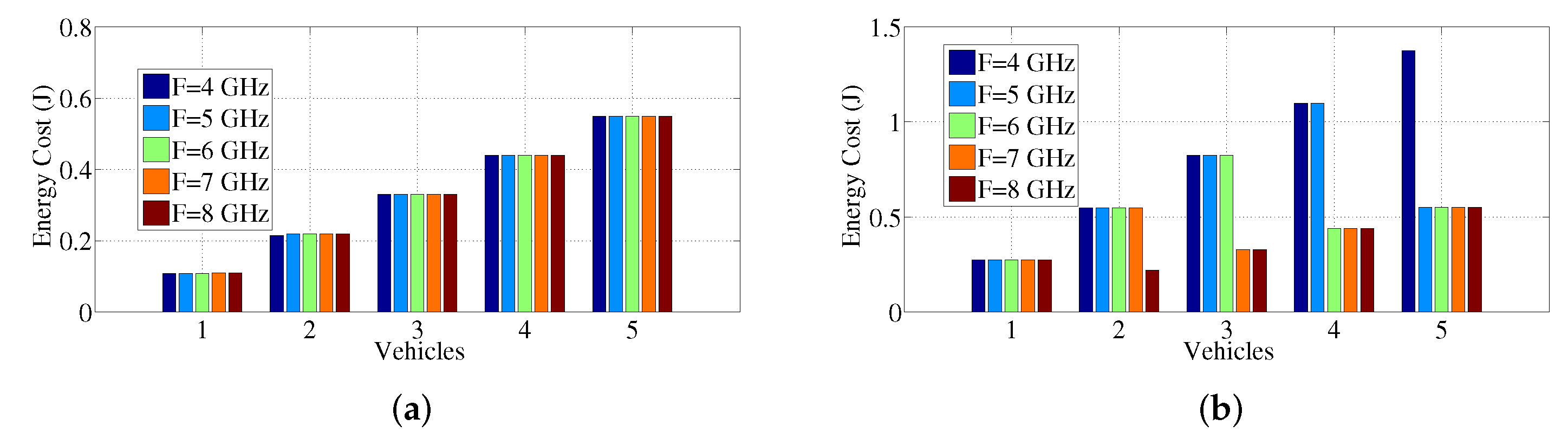
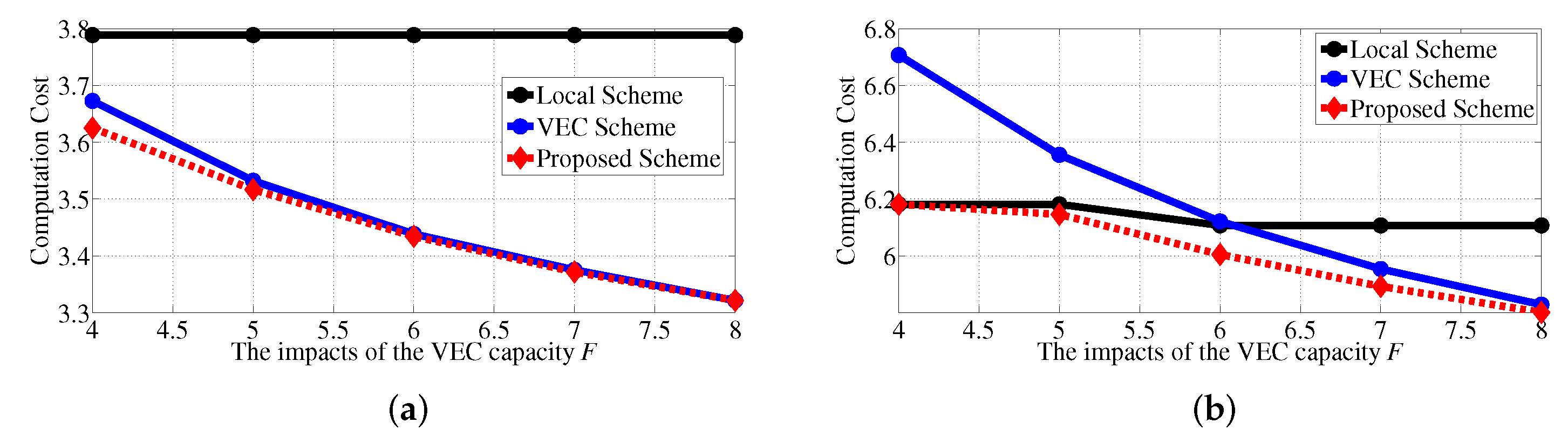
5.3. Impacts on the Capacity of the VEC Server
6. Discussions
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| VEC | vehicular edge computing |
| MEC | mobile edge computing |
| IoT | Internet of Things |
| MINP | mixed-integer nonlinear programming |
References
- Zhao, L.; Li, X.; Gu, B. Vehicular Communications: Standardization and Open Issues. IEEE Commun. Stand. Mag. 2018, 2, 74–87. [Google Scholar] [CrossRef]
- Zhao, L.; Zheng, T.; Lin, M.; Hawbani, A.; Shang, J.; Fan, C. SPIDER: A Social Computing Inspired Predictive Routing Scheme for Softwarized Vehicular Networks. IEEE Trans. Intell. Transp. 2021, 1, 1–12. [Google Scholar] [CrossRef]
- Wang, Y.; Lang, P.; Tian, D. A game-based computation offloading method in vehicular multiaccess edge computing networks. IEEE Internet Things 2020, 6, 4987–4996. [Google Scholar] [CrossRef]
- Sun, Y.; Zhou, S.; Niu, Z. Distributed task replication for vehicular edge computing: Performance analysis and learning-based algorithm. IEEE Trans. Wirel. Commun. 2021, 20, 1138–1151. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, K.; Tan, Z.; Li, X.; Sharma, S.; Liu, Z. A novel cost optimization strategy for sdn-enabled uav-assisted vehicular computation offloading. IEEE Trans. Intell. Transp. 2021, 22, 3664–3674. [Google Scholar] [CrossRef]
- Dai, Y.; Xu, D.; Maharjan, S. Joint load balancing and offloading in vehicular edge computing and networks. IEEE Internet Things 2019, 6, 4377–4387. [Google Scholar] [CrossRef]
- Qiao, G.; Leng, S.; Maharjan, S. Deep Reinforcement Learning for Cooperative Content Caching in Vehicular Edge Computing and Networks. IEEE Internet Things 2020, 7, 247–257. [Google Scholar] [CrossRef]
- Boukerche, A.; Grande, R.E.D. Vehicular cloud computing: Architectures, applications, and mobility. Comput. Netw. 2018, 135, 171–189. [Google Scholar] [CrossRef]
- Khayyat, M.; Elgendy, I.A.; Muthanna, A. Advanced Deep Learning-Based Computational Offloading for Multilevel Vehicular Edge-Cloud Computing Networks. IEEE Access 2020, 8, 137052–137062. [Google Scholar] [CrossRef]
- Hou, X.; Li, Y.; Liu, P. Vehicular fog computing: A viewpoint of vehicles as the infrastructures. IEEE Trans. Veh. Technol. 2016, 65, 3860–3873. [Google Scholar] [CrossRef]
- Hou, X.; Li, Y.; Liu, P. Energy-Efficient Edge Computing Service Provisioning for Vehicular Networks: A Consensus ADMM Approachs. IEEE Trans. Veh. Technol. 2019, 68, 5087–5099. [Google Scholar]
- Zhu, C.; Tao, J.; Pastor, J. Folo: Latency and quality optimized task allocation in vehicular fog computing. IEEE Internet Things 2019, 6, 4150–4161. [Google Scholar] [CrossRef] [Green Version]
- Du, J.; Yu, F.R.; Chu, X. Computation offloading and resource allocation in vehicular networks based on dual-side cost minimization. IEEE Trans. Veh. Technol. 2019, 68, 1079–1092. [Google Scholar] [CrossRef]
- Kang, J.; Yu, R.; Huang, X. Blockchain for secure and efficient data sharing in vehicular edge computing and networks. IEEE Internet Things 2019, 6, 4660–4670. [Google Scholar] [CrossRef]
- Wang, X.; Ning, Z.; Guo, S. Imitation Learning Enabled Task Scheduling for Online Vehicular Edge Computing. IEEE Trans. Mobile Comput. 2022, 21, 598–611. [Google Scholar] [CrossRef]
- Shinde, S.S.; Bozorgchenani, A.; Tarchi, D. On the Design of Federated Learning in Latency and Energy Constrained Computation Offloading Operations in Vehicular Edge Computing Systems. IEEE Trans. Veh. Technol. 2022, 71, 2041–2057. [Google Scholar] [CrossRef]
- Ng, J.; Lim, W.; Xiong, Z. A double auction mechanism for resource allocation in coded vehicular edge computing. IEEE Trans. Veh. Technol. 2022, 71, 1832–1845. [Google Scholar]
- Ning, Z.; Dong, P.; Wang, X. Deep reinforcement learning for vehicular edge computing: An intelligent offloading system. ACM Trans. Intell. Syst. Technol. 2019, 10, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Feng, D.; Zhang, S. Computation offloading for mobile edge computing enabled vehicular networks. IEEE Access 2019, 7, 62624–62632. [Google Scholar] [CrossRef]
- Tan, L.; Hu, R.Q. Mobility-aware edge caching and computing in vehicle networks: A deep reinforcement learning. IEEE Trans. Veh. Technol. 2018, 67, 10190–10203. [Google Scholar] [CrossRef]
- Zhou, Z.; Liu, P.; Feng, J. Computation resource allocation and task assignment optimization in vehicular fog computing: A contract-matching approach. IEEE Trans. Veh. Technol. 2019, 68, 3113–3125. [Google Scholar] [CrossRef]
- Li, S.; Zhang, N.; Chen, H. Joint road side units selection and resource allocation in vehicular edge computing. IEEE Trans. Veh. Technol. 2021, 70, 13190–13204. [Google Scholar] [CrossRef]
- Bute, M.S.; Fan, P.; Zhang, L. An efficient distributed task offloading scheme for vehicular edge computing networks. IEEE Trans. Veh. Technol. 2021, 70, 13149–13161. [Google Scholar] [CrossRef]
- Wu, Z.; Yan, D. Deep reinforcement learning-based computation offloading for 5g vehicle-aware multi-access edge computing network. China Commun. 2021, 18, 26–41. [Google Scholar] [CrossRef]
- Cui, Y.; Du, L.; Wang, H. Reinforcement learning for joint optimization of communication and computation in vehicular networks. IEEE Trans. Veh. Technol. 2021, 70, 13062–13072. [Google Scholar] [CrossRef]
- Li, X.; Zhao, L.; Yu, K.; Aloqaily, M.; Jararweh, Y. A cooperative resource allocation model for IoT applications in mobile edge computing. Comput. Commun. 2021, 173, 183–191. [Google Scholar] [CrossRef]
- Feng, W.; Zhang, N.; Li, S.; Lin, S.; Ning, R.; Yang, S.; Gao, Y. Latency Minimization of Reverse Offloading in Vehicular Edge Computing. IEEE Trans. Veh. Technol. 2022, 71, 5343–5357. [Google Scholar] [CrossRef]
- Li, S.; Sun, W.; Sun, Y.; Huo, Y. Energy-Efficient Task Offloading Using Dynamic Voltage Scaling in Mobile Edge Computing. IEEE Trans. Netw. Sci. Eng. 2021, 8, 588–598. [Google Scholar] [CrossRef]
- Wang, Q.; Li, Z.; Nai, K. Dynamic resource allocation for jointing vehicle-edge deep neural network inference. J. Syst. Architect. 2021, 117, 1–12. [Google Scholar] [CrossRef]
- Chen, X.; Jiao, L.; Li, W.; Fu, X. Efficient multi-user computation offloading for mobile-edge cloud computing. IEEE/ACM Trans. Netw. 2016, 24, 2795–2808. [Google Scholar] [CrossRef] [Green Version]
- Lyu, X.; Tian, H.; Ni, W.; Zhang, Y.; Zhang, P.; Liu, R.P. Energy-efficient admission of delay-sensitive tasks for mobile edge computing. IEEE Trans. Commun. 2018, 6, 2603–2616. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Bu, X.; Yang, K. Green large-scale fog computing resource allocation using joint benders decomposition, dinkelbach algorithm, admm, and branch-and-bound. IEEE Internet Thing 2019, 6, 4106–4117. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Sun, Y.; Guo, X.; Song, J. Adaptive learning-based task offloading for vehicular edge computing systems. IEEE Trans. Veh. Technol. 2019, 68, 3061–3074. [Google Scholar] [CrossRef] [Green Version]
- Masini, B.M.; Bazzi, A.; Natalizio, E. Radio Access for Future 5G Vehicular Networks. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–7. [Google Scholar]
- Liu, L.; Chen, C.; Pei, Q.; Maharjan, S.; Zhang, Y. Vehicular Edge Computing and Networking: A Survey. Mob. Netw. Appl. 2021, 26, 1145–1168. [Google Scholar] [CrossRef]
- Zhang, K.; Mao, Y.; Leng, S.; He, Y.; Zhang, Y. Mobile-Edge Computing for Vehicular Networks: A Promising Network Paradigm with Predictive Off-Loading. IEEE Veh. Technol. Mag. 2017, 12, 36–44. [Google Scholar] [CrossRef]
- Moubayed, A.; Shami, A.; Heidari, P.; Brunner, B. Edge-Enabled V2X Service Placement for Intelligent Transportation Systems. IEEE Trans. Mobile Comput. 2021, 20, 1380–1392. [Google Scholar] [CrossRef]
- Edwan, T.A.; Tahat, A.; Yanikomeroglu, H.; Crowcroft, J. An Analysis of a Stochastic ON-OFF Queueing Mobility Model for Software-Defined Vehicle Networks. IEEE Trans. Mobile Comput. 2022, 21, 1552–1565. [Google Scholar] [CrossRef]
- Zhao, L.; Chai, H.; Han, Y.; Yu, K.; Mumtaz, S. A Collaborative V2X Data Correction Method for Road Safety. IEEE Trans. Reliab. 2022, 1, 951–962. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, C.; Li, W.; Zhao, K.; Tarchi, D.; Wan, S.; Kumar, N. INTERLINK: A Digital Twin-Assisted Storage Strategy for Satellite-Terrestrial Networks. IEEE Trans. Aerosp. Electron. Syst. 2022, 1. [Google Scholar] [CrossRef]
- Xu, Y.; Xie, H.; Wu, Q.; Huang, C.; Yuen, C. Robust Max-Min Energy Efficiency for RIS-Aided HetNets With Distortion Noises. IEEE Wirel. Commun. 2022, 70, 1457–1471. [Google Scholar]
- Liu, Z.; Zhan, C.; Cui, Y.; Wu, C.; Hu, H. Robust Edge Computing in UAV Systems via Scalable Computing and Cooperative Computing. IEEE Wirel. Commun. 2021, 28, 36–42. [Google Scholar]
- Li, X.-G.; Han, S.-F.; Zhao, L.; Gong, C.-Q.; Liu, X.-J. New dandelion algorithm optimizes extreme learning machine for biomedical classification problems. Comput. Intell. Neurosci. 2017, 2017, 4523754. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, N.; Tang, J.; Li, X.; Zhao, L. A novel improved bat algorithm in uav path planning, Computers. Comput. Mater. Contin. 2019, 61, 323–344. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| N | the number of vehicles |
| the allocated computing resources of vehicle i | |
| the vehicular application size of the vehicle i in bits | |
| the needed number of CPU cycles to finish the vehicular application of vehicle i | |
| the weighting factor of the execution time cost for vehicle i | |
| the weighting factor the energy energy of vehicle i | |
| the Lagrange multiplier | |
| the allocated bandwidth to vehicle i | |
| the transmission power of vehicle i | |
| the channel gain from vehicle i to the BS | |
| the Gaussian noise | |
| the uplink rate for vehicle i | |
| the vehicular application offloading strategy determined by vehicle i | |
| the allocated VEC computation resources to vehicle i |
| Parameters | Values |
|---|---|
| N | 5 |
| 0.36 MHz | |
| [0.2, 1] Mbits | |
| 1000 Cycles/bit | |
| 0.2 W | |
| m | |
| W | |
| [0, 1] GHz | |
| 10 GHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, F.; Yang, X.; Li, X.; Deng, H. Computational Resources Allocation and Vehicular Application Offloading in VEC Networks. Electronics 2022, 11, 2130. https://doi.org/10.3390/electronics11142130
Gu F, Yang X, Li X, Deng H. Computational Resources Allocation and Vehicular Application Offloading in VEC Networks. Electronics. 2022; 11(14):2130. https://doi.org/10.3390/electronics11142130
Chicago/Turabian StyleGu, Fan, Xiaoying Yang, Xianwei Li, and Haiquan Deng. 2022. "Computational Resources Allocation and Vehicular Application Offloading in VEC Networks" Electronics 11, no. 14: 2130. https://doi.org/10.3390/electronics11142130