
Study on Co-Estimation of SoC and SoH for Second-Use Lithium-Ion Power Batteries


Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Major Benefits | Major Limitations | Application Conditions |
|---|---|---|---|
| Coulombic counting [6,7] | Easy implementation; online; low power consumption. | Error accumulation; needs accurate initial SoC current. | In conjunction with various methods. |
| OCV method [8,9,10] | Easy to understand; initial SoC calibration. | Time-consuming; long relaxation time. | SoC offline estimation in the lab. |
| NN [11,12,13] | Independent model; great accuracy; high universality. | Large amount of training data; generalization ability issues. | Needs numerous experimental data. |
| KF [14,15,16] | Online; insensitive to initial SoC; pinpoints accuracy. | Relies on model accuracy; domain knowledge required. | Accurate battery model. |
| EKF [35,36] | High accuracy; strong robustness. | Impractical assumption of white Gaussian noise. | Accurate battery model. |
| Approach | Major Benefits | Major Limitations | Application Conditions |
|---|---|---|---|
| Voltage trace method [18] | Easy to understand; simple structure and low cost. | Online estimates are difficult to achieve. | Fixed environment, such as lab. |
| ICA [19] | High measurement accuracy, easy to implement. | Repeated charge-discharge tests are required. | SoH estimation in the laboratory. |
| KF [20] | Online; high accuracy. | Relies on model accuracy; domain knowledge required. | Accurate battery model. |
| PF [21] | High accuracy; strong robustness, handles non-Gaussian system noise well. | Dimension of sampling space reduced; a large sample size. | Accurate battery model. |
| Data-driven method [22,23,24,25,26,27,28,29] | Excellent learning and generalization abilities; strong nonlinear mapping ability. | Large amount of training data; time-consuming trial and error process. | High performance processors; data storage technology conditions. |
2. Second Use Framework and Battery Experimental System
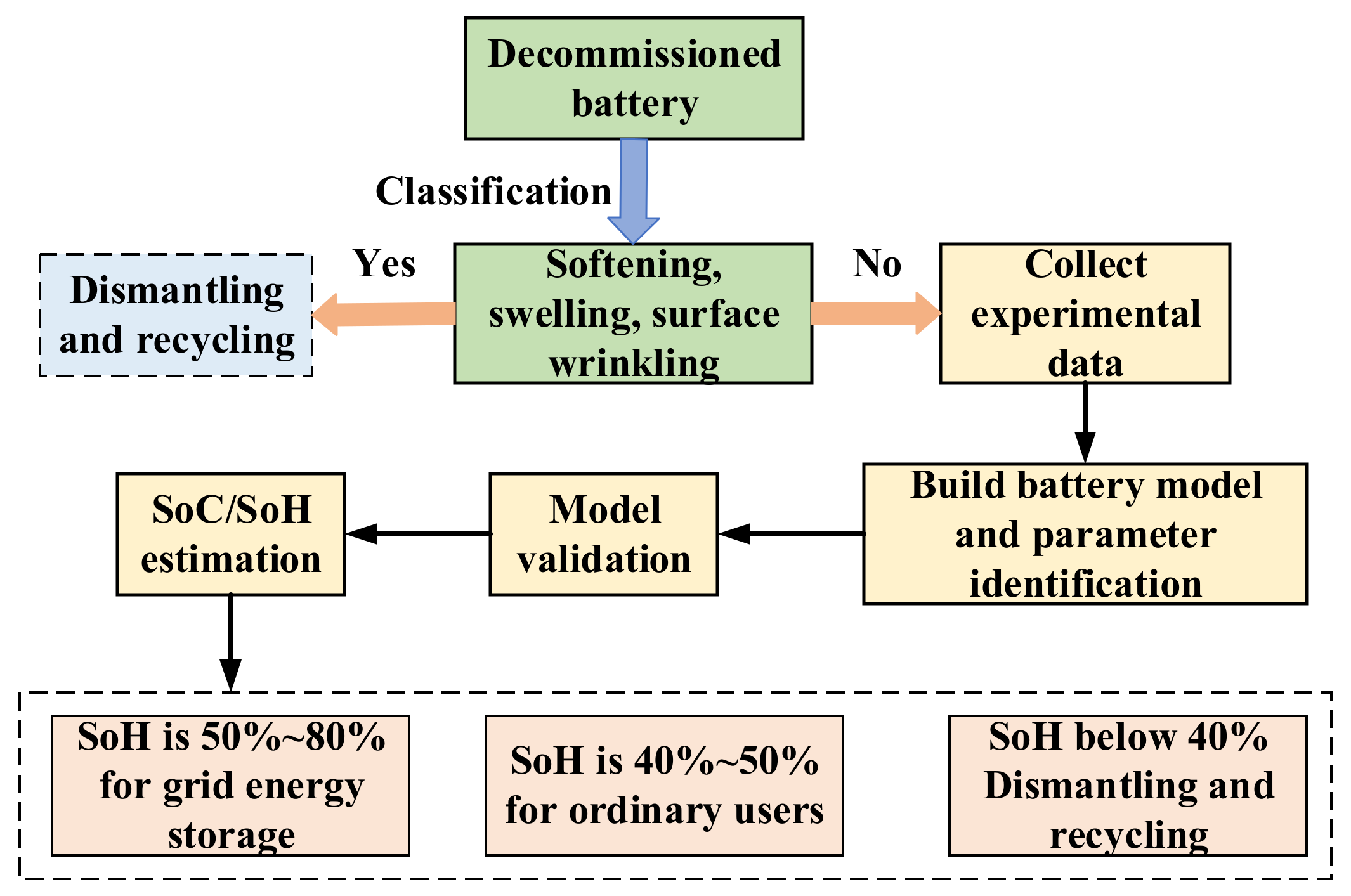
2.1. Second-Use Framework of Vehicle Power Battery
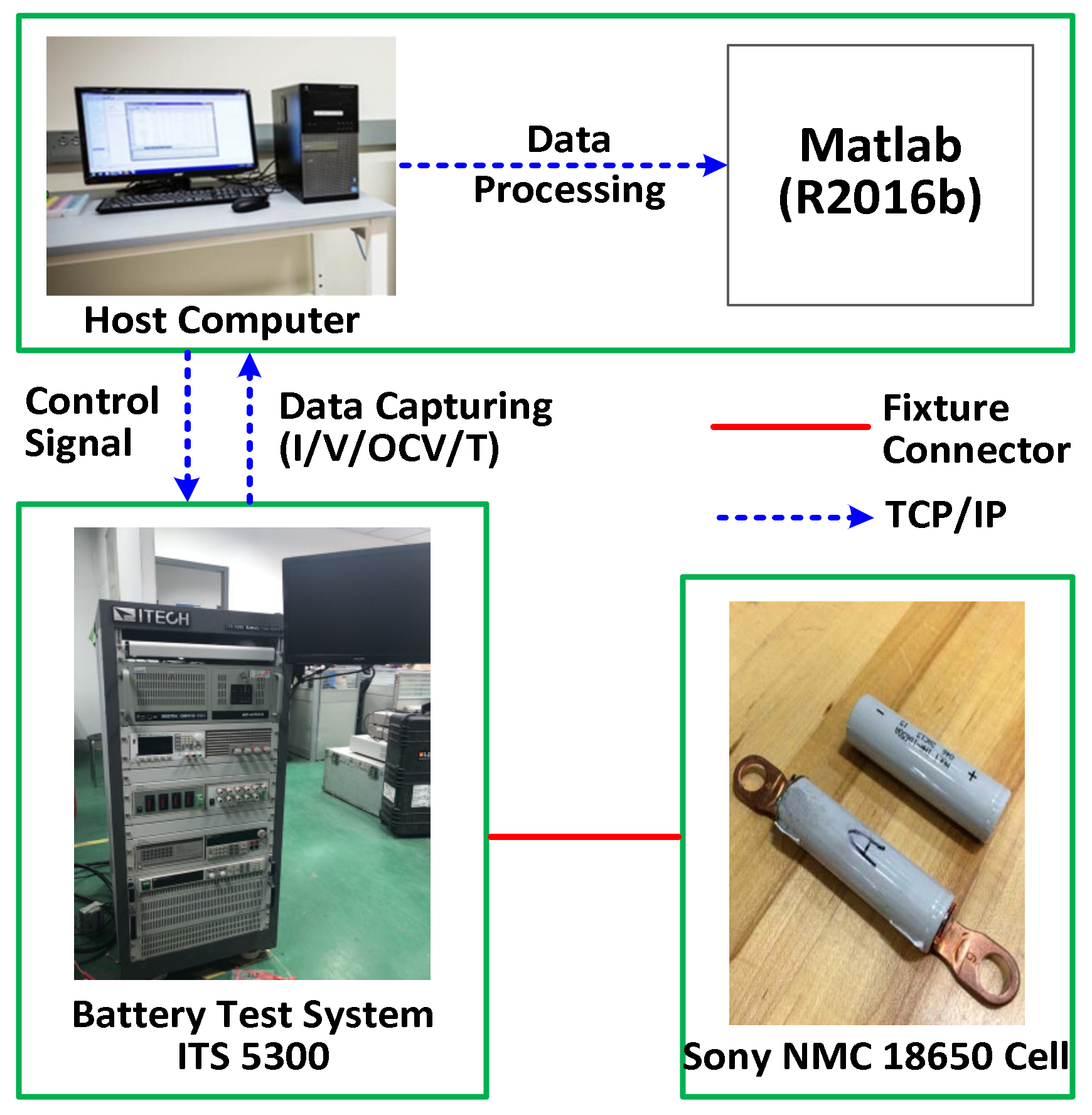
2.2. Battery Experimental System
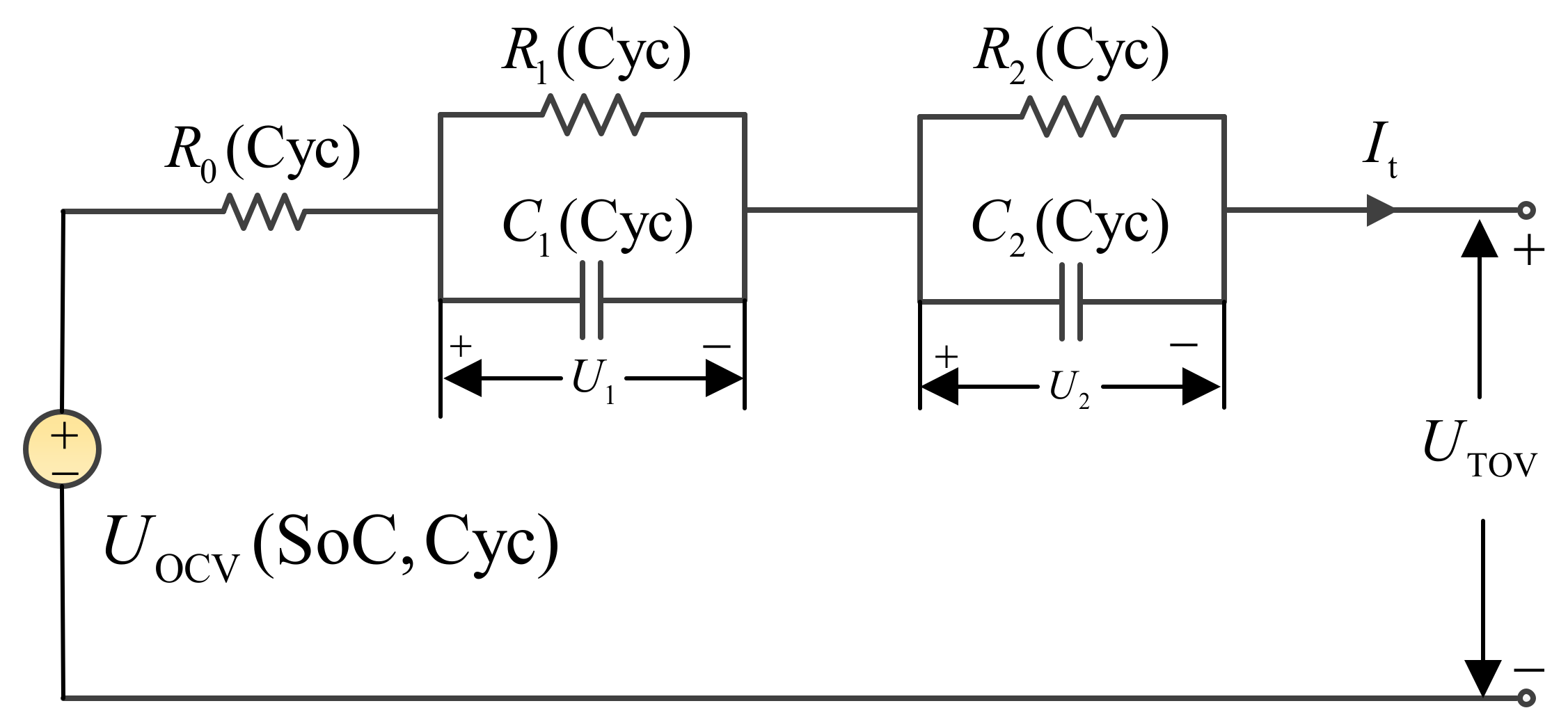
3. Battery Model Development and Parameters Estimation
4. The Co-Estimation of Battery SoC and SoH
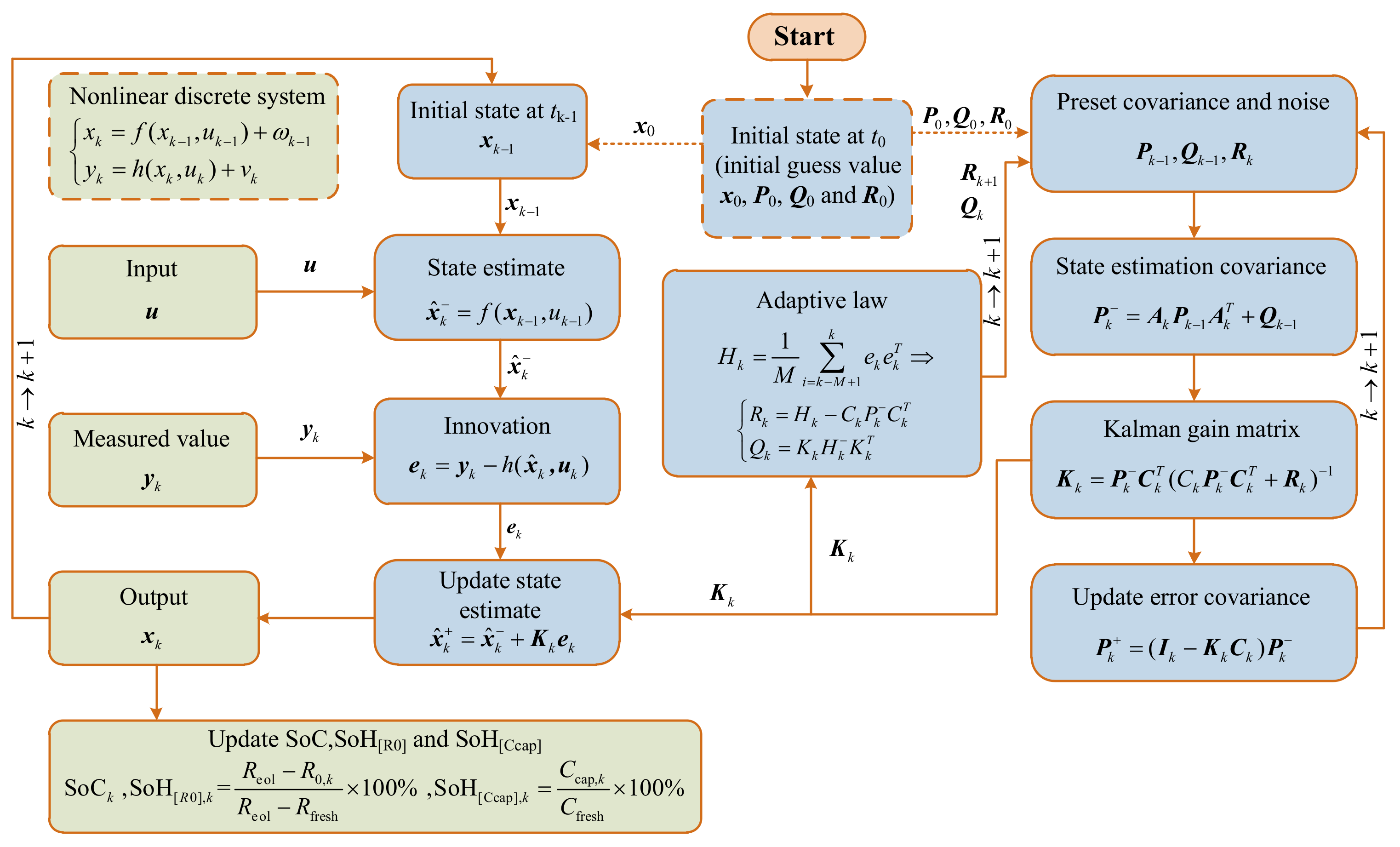
4.1. Adaptive Extended Kalman Filter Algorithm
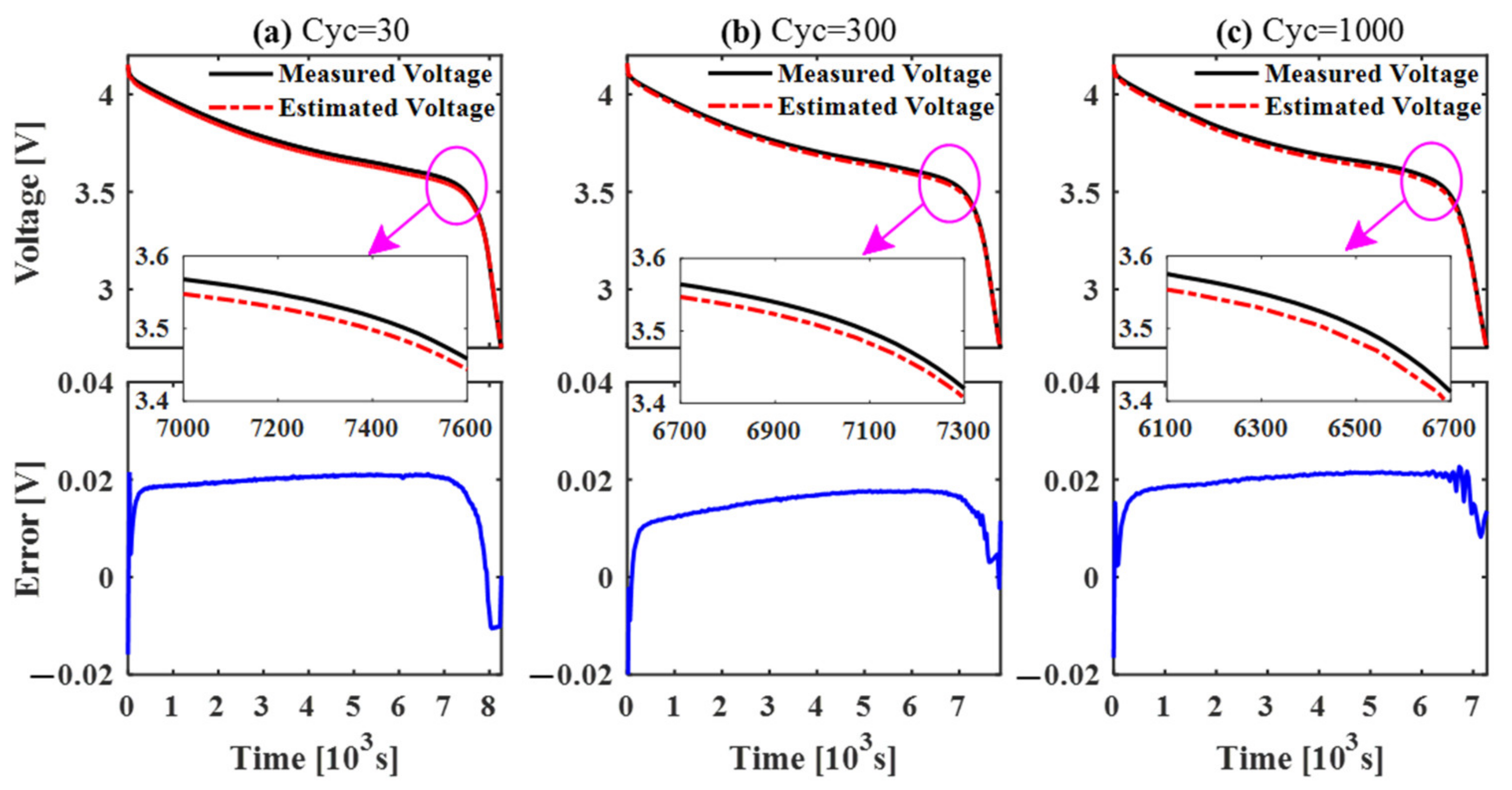
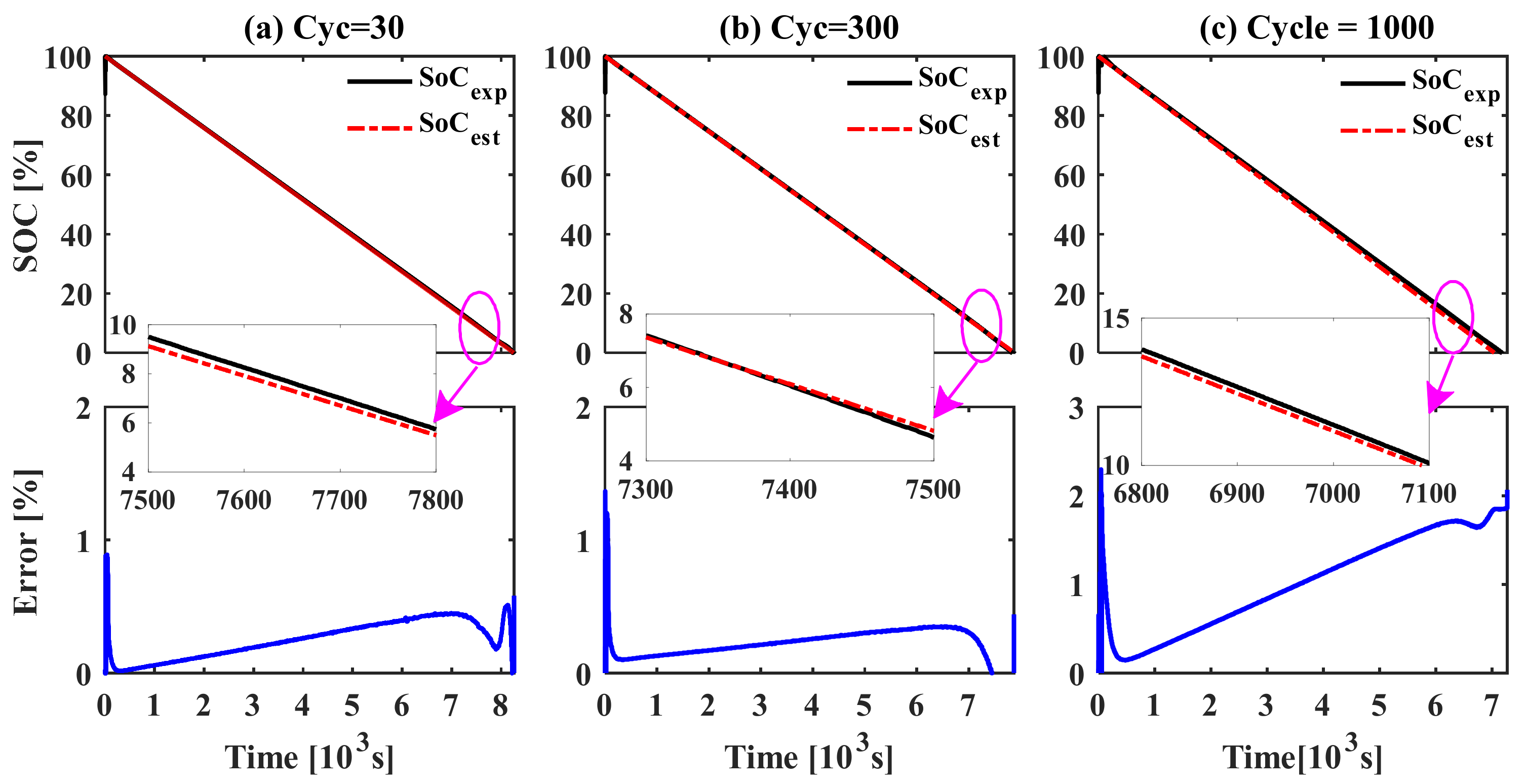
4.2. SoC Estimation Results and Discussions
4.3. SoH Estimation Results and Discussions
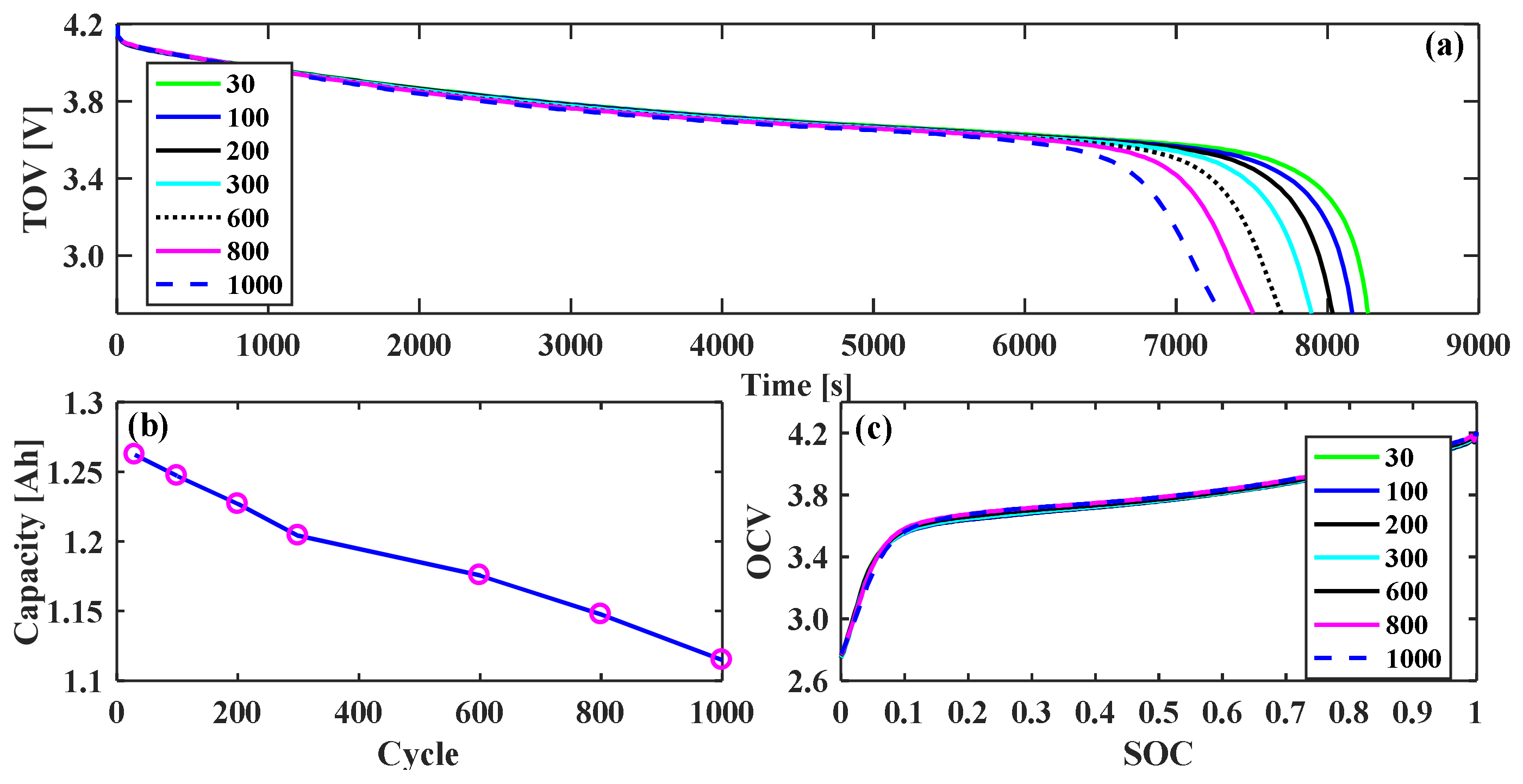
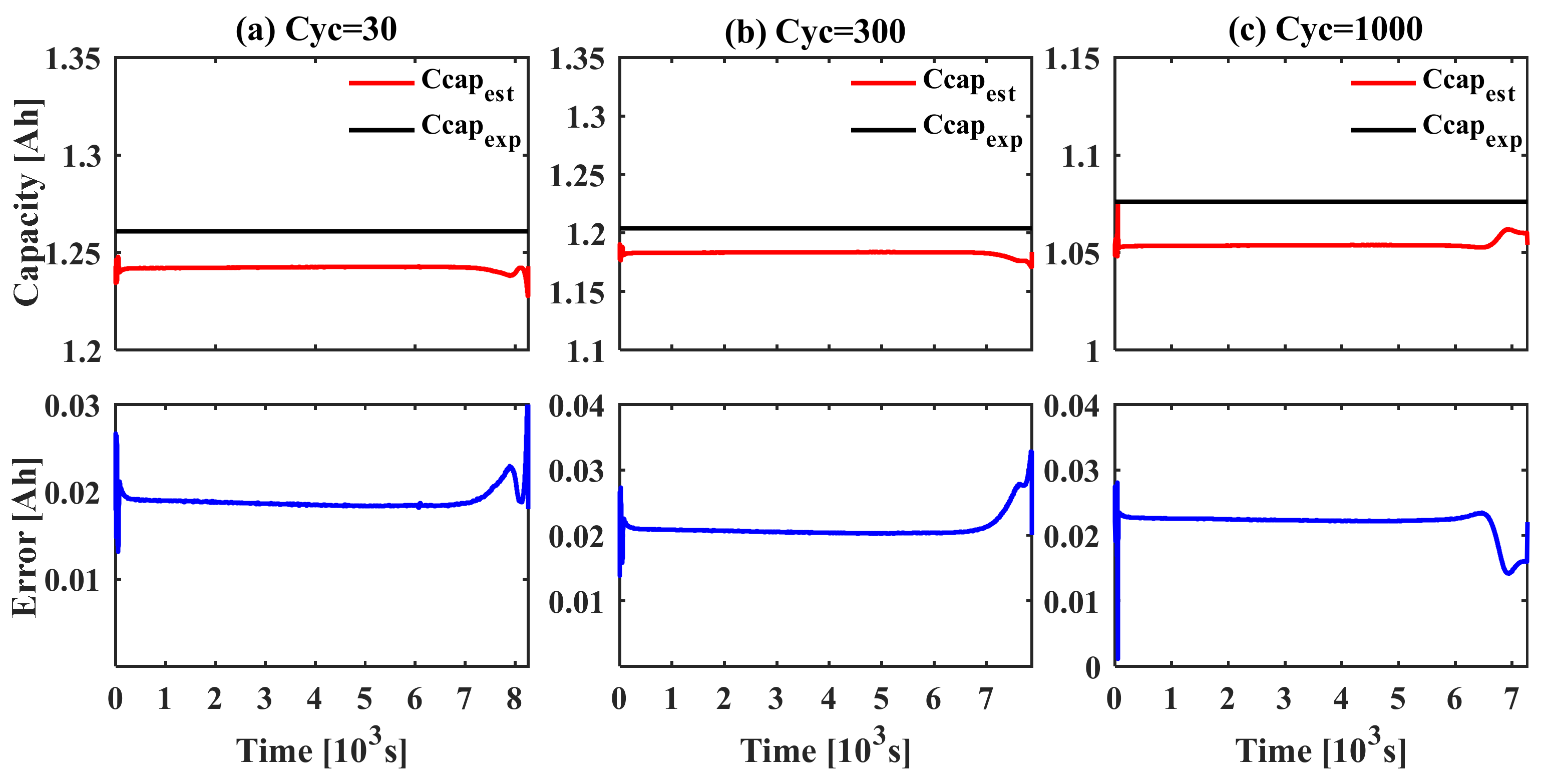
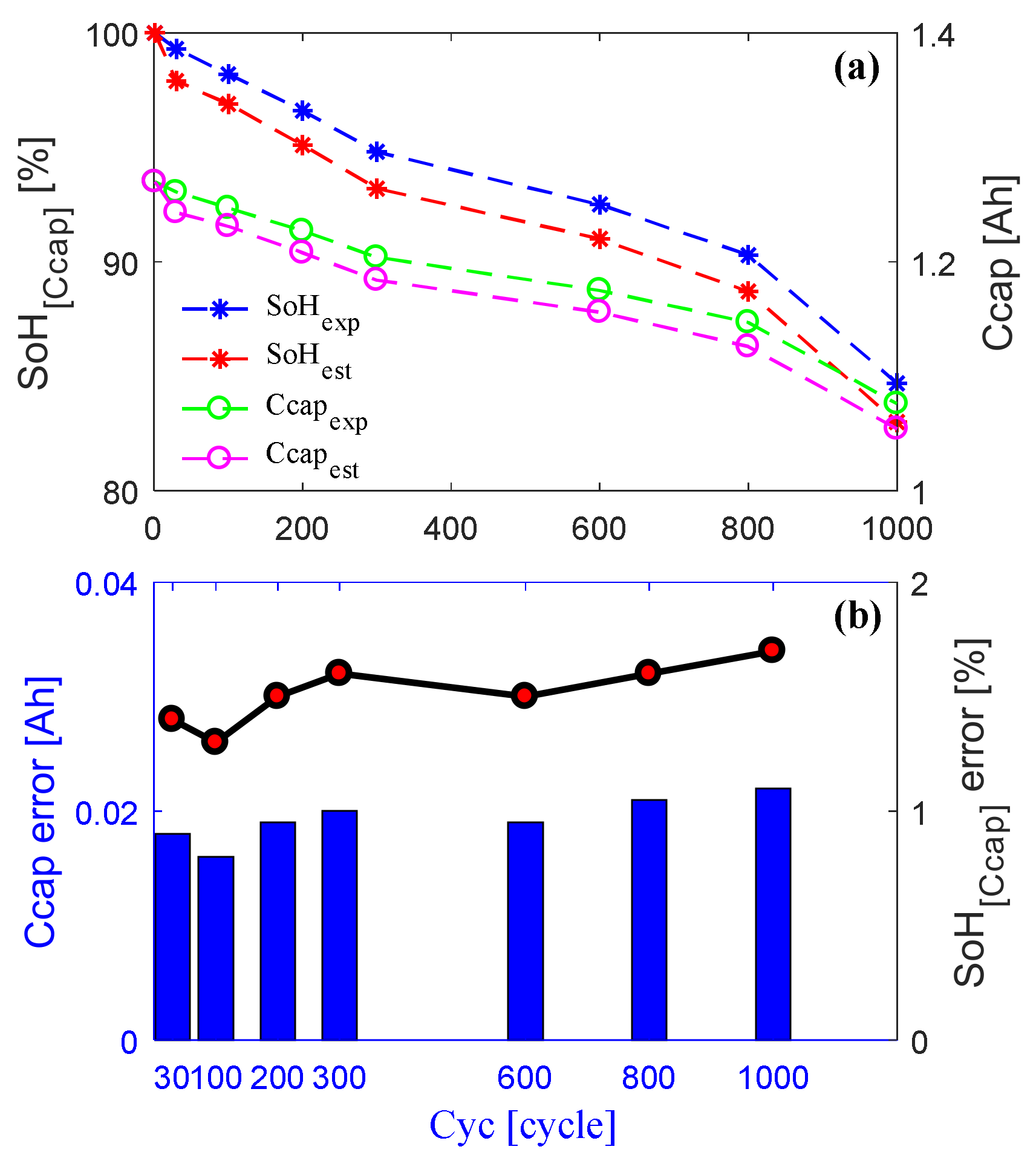
4.3.1. Capacity Estimation Results under Different Cycles
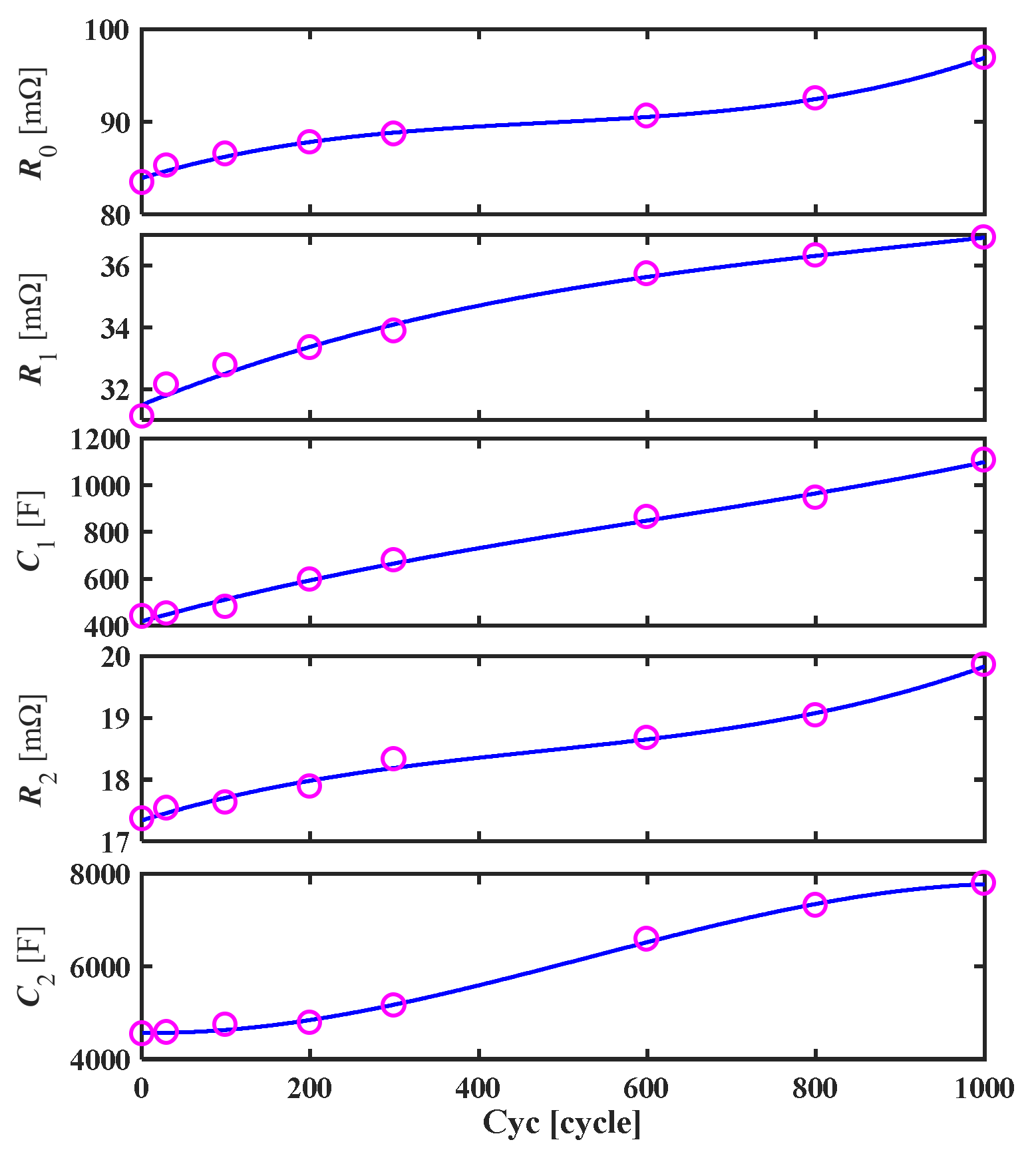
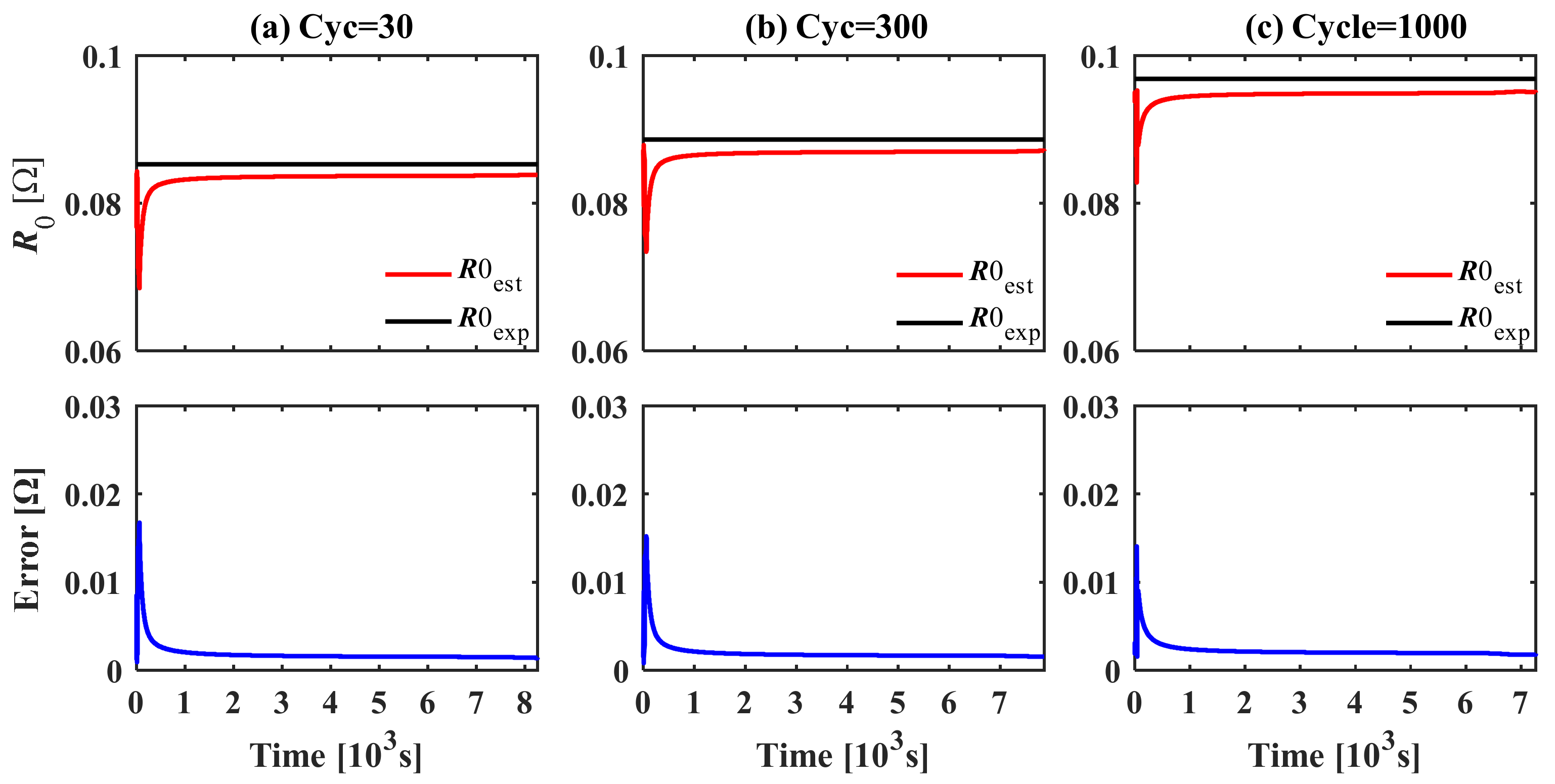
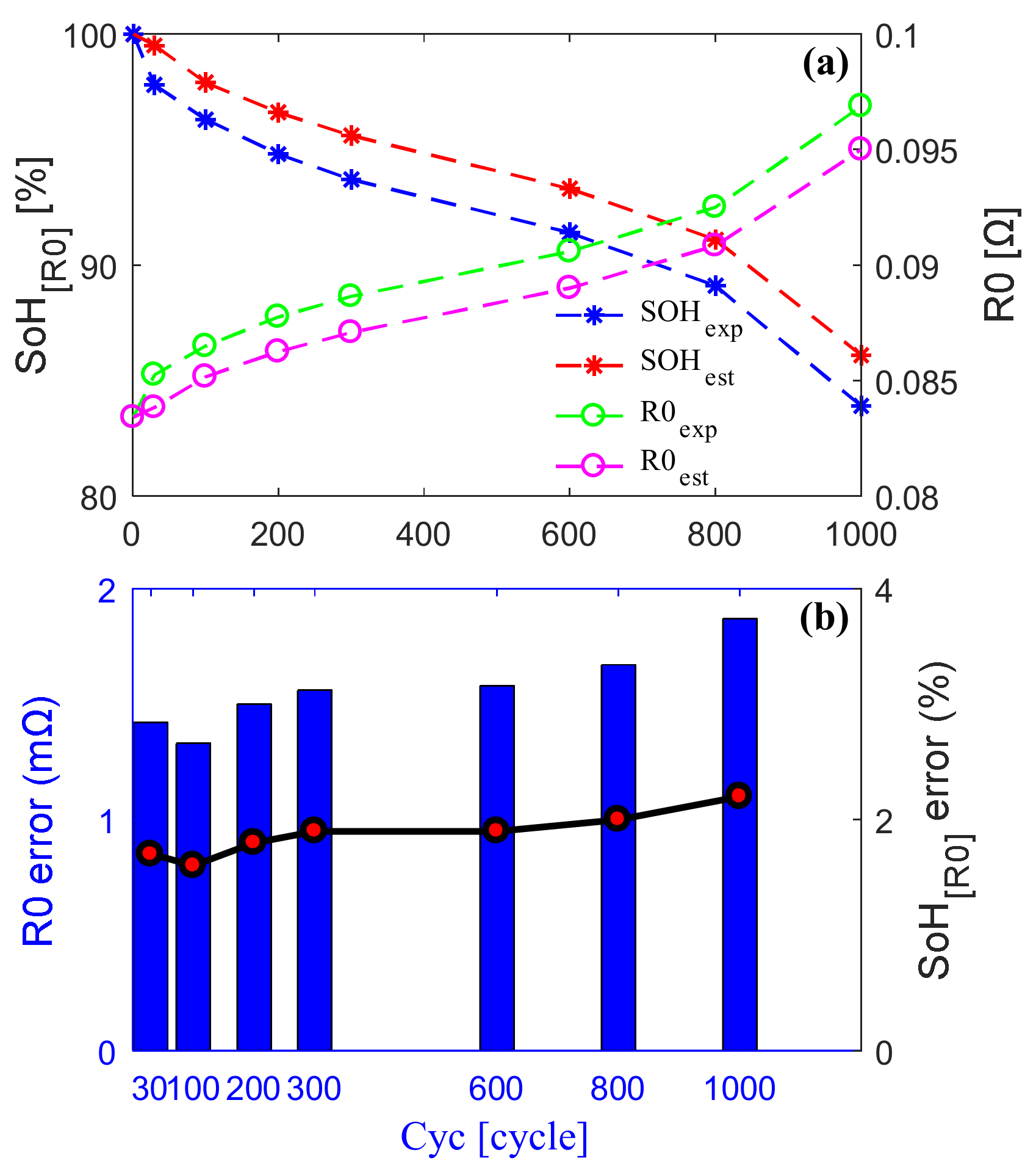
4.3.2. Resistance Estimation Results under Different Cycles
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xia, B.; Chen, G.; Zhou, J.; Yang, Y.; Huang, R.; Wang, W.; Wang, H. Online parameter identification and joint estimation of the State of charge and the state of health of lithium-ion batteries considering the degree of polarization. Energies 2019, 12, 2939. [Google Scholar] [CrossRef] [Green Version]
- Sun, T.F.; Xia, B.Z.; Liu, Y.F.; Lai, Y.; Zheng, W.; Wang, H.; Wang, M. A novel hybrid prognostic approach for remaining useful life estimation of lithium-ion batteries. Energies 2019, 12, 3678. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Liu, C.H.; Hu, M.H.; Li, L.; Jin, G.; Yang, H.Q. Joint Estimation of SOC and Available Capacity of Power Lithium-Ion Battery. Electronics 2022, 11, 151. [Google Scholar] [CrossRef]
- Xu, Y.; Hu, M.; Fu, C.; Cao, K.; Su, Z.; Yang, Z. State of charge estimation for lithium-ion batteries based on temperature-dependent second-order RC model. Electronics 2019, 8, 1012. [Google Scholar] [CrossRef] [Green Version]
- Dotoli, M.; Rocca, R.; Giuliano, M.; Nicol, G.; Parussa, F.; Baricco, M.; Sgroi, M.F. A Review of Mechanical and Chemical Sensors for Automotive Li-Ion Battery Systems. Sensors 2022, 22, 1763. [Google Scholar] [CrossRef]
- Yu, H.F.; Lu, R.G.; Zhu, C.B. State of Charge Estimation Calibration for Ni-MH Battery Based on Ampere-Hour Method. Trans. China Electrotech. Soc. 2012, 27, 12–18. [Google Scholar]
- Bao, H.; Yu, Y. State of Charge Estimation Calibration Based on Ampere-Hour Method. Comput. Simul. 2013, 30, 148–151, 159. [Google Scholar]
- Deng, Y.; Hu, Y.L.; Cao, Y. An improved algorithm of soc testing based on open-circuit voltage-ampere hour method. In Intelligent Computing in Smart Grid and Electrical Vehicles; Springer: Berlin/Heidelberg, Germany, 2014; pp. 258–267. [Google Scholar]
- Lee, S.; Kim, J.; Lee, J. State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Xing, Y.J.; He, W.; Pecht, M. State of charge estimation of lithium-ion batteries using the open-circuit voltage at various ambient temperatures. Appl. Energy 2014, 113, 106–115. [Google Scholar] [CrossRef]
- Enache, B.A.; Diaconescu, E. Estimating a battery State of Charge using neural networks. In Proceedings of the 2014 International Symposium on Fundamentals of Electrical Engineering (ISFEE), Bucharest, Romania, 28–29 November 2014; pp. 1–6. [Google Scholar]
- Xia, B.Z.; Cui, D.Y.; Sun, Z. State of charge estimation of lithium-ion batteries using optimized Levenberg-Marquardt wavelet neural network. Energy 2018, 153, 694–705. [Google Scholar] [CrossRef]
- Charkhgard, M.; Farrokhi, M. State-of-Charge Estimation for Lithium-Ion Batteries Using Neural Networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Luo, J.Y.; Peng, J.K.; He, H.W. Lithium-ion battery SOC estimation study based on Cubature Kalman filter. Energy Procedia 2019, 158, 3421–3426. [Google Scholar] [CrossRef]
- Shrivastava, P.; Soon, T.K.; Idris, M.Y.I.B.; Mekhilef, S. Overview of model-based online state-of-charge estimation using Kalman filter family for lithium-ion batteries. Renew. Sustain. Energy Rev. 2019, 113, 109233. [Google Scholar] [CrossRef]
- Sun, H.H.; Bi, J.; Shao, S. The State of Charge Estimation of Lithium Battery in Electric Vehicle Based on Extended Kalman Filter. Adv. Mater. Res. 2014, 953–954, 796–799. [Google Scholar] [CrossRef]
- Sgroi, M.F.; Dotoli, M.; Giuliano, M.; Nicol, G.; Parussa, F.; Rocca, R. Smart batteries: Requirements of the automotive world. In Proceedings of the 2021 IEEE International Workshop on Metrology for Automotive (MetroAutomotive), Bologna, Italy, 2–3 July 2021; pp. 42–47. [Google Scholar]
- Wu, J.; Wang, Y.J.; Zhang, X. A novel state of health estimation method of Li-ion battery using group method of data handling. J. Power Sources 2016, 327, 457–464. [Google Scholar] [CrossRef]
- Li, X.; Wang, Z.; Zhang, L. State-of-health estimation for Li-ion batteries by combing the incremental capacity analysis method with grey relational analysis. J. Power Sources 2019, 410–411, 106–114. [Google Scholar] [CrossRef]
- Hu, C.; Youn, B.D.; Chung, J. A multiscale framework with extended Kalman filter for lithium-ion battery SOC and capacity estimation. Appl. Energy 2012, 92, 694–704. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.W.M.; Tsui, K.L. An ensemble model for predicting the remaining useful performance of lithium-ion batteries. Microelectron. Reliab. 2013, 53, 811–820. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, C.; Chen, Z.J. An online method for lithium-ion battery remaining useful life estimation using importance sampling and neural networks. Appl. Energy 2016, 173, 134–140. [Google Scholar] [CrossRef]
- Yang, D.; Wang, Y.; Pan, R. A Neural Network Based State-of-Health Estimation of Lithium-ion Battery in Electric Vehicles. Energy Procedia 2017, 105, 2059–2064. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Ni, Y.L.; Lu, S. Remaining Useful Life Prediction of Lithium-Ion Batteries Using Support Vector Regression Optimized by Artificial Bee Colony. IEEE Trans. Veh. Technol. 2019, 68, 9543–9553. [Google Scholar] [CrossRef]
- Wei, J.W.; Dong, G.Z.; Chen, Z.H. Remaining Useful Life Prediction and State of Health Diagnosis for Lithium-Ion Batteries Using Particle filter and Support Vector Regression. IEEE Trans. Ind. Electron. 2018, 65, 5634–5643. [Google Scholar] [CrossRef]
- Zheng, C.; Mi, C.C.; Fu, Y. Online Battery State of Health Estimation Based on Genetic Algorithm for Electric and Hybrid Vehicle Applications. J. Power Sources 2013, 240, 184–192. [Google Scholar]
- Zhang, X.; Wang, Y.; Liu, C.H. A novel approach of battery pack state of health estimation using artificial intelligence optimization algorithm. J. Power Sources 2018, 376, 191–199. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M. Remaining useful performance analysis of batteries. In Proceedings of the 2011 IEEE Conference on Prognostics and Health Management, Denver, CO, USA, 20–23 June 2011; pp. 1–6. [Google Scholar]
- Lyu, Z.Q.; Gao, R.J. A model-based and data-driven joint method for state-of-health estimation of lithium-ion battery in electric vehicles. Int. J. Energy Res. 2019, 43, 7956–7969. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster-Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- Zhang, C.B.; Yu, X.W.; Dong, G.Z. A method for remaining discharge time prediction of lithium-ion batteries under dynamic uncertainty. Int. J. Energy Res. 2019, 43, 1760–1774. [Google Scholar] [CrossRef]
- Liang, K.Z.; Zhang, Z.S.; Liu, P. Data-driven Ohmic Resistance Estimation of Battery Packs for Electric Vehicles. Energies 2019, 12, 4772. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.T.; Xue, Q.; Shen, J.W. State of Health Estimation for Lithium-ion Batteries Based on Healthy Featuresand Long Short-term Memory. IEEE Access 2020, 8, 28533–28547. [Google Scholar] [CrossRef]
- Li, X.Y.; Wang, Z.P.; Zhang, L. Co-estimation of capacity and state-of-charge for lithium-ion batteries in electric vehicles. Energy 2019, 174, 33–44. [Google Scholar] [CrossRef]
- Zou, Y.; Hu, X.S.; Ma, H.M. Combined State of Charge and State of Health estimation over lithium-ion battery cell cycle lifespan for electric vehicles. J. Power Sources 2015, 273, 793–803. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.G.; Lu, L.G. The Co-estimation of State-of-Charge, State-of-Health and State-of-Function for Lithium-ion batteries in Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- Du, J.N.; Liu, Z.T.; Wang, Y.Y. An adaptive sliding mode observer for lithium-ion battery state of charge and state of health estimation in electric vehicles. Control. Eng. Pract. 2016, 54, 81–90. [Google Scholar] [CrossRef]
- Pang, H.; Mou, L.J.; Guo, L. Parameter identification and state-of-charge estimation approach for enhanced lithium-ion battery equivalent circuit model considering influence of ambient temperatures. Chin. Phys. B 2019, 28, 108201. [Google Scholar] [CrossRef]
- Pang, H.; Guo, L.; Wu, L.X. An enhanced temperature-dependent model and state-of-charge estimation for a Li-Ion battery using extended Kalman filter. Int. J. Energy Res. 2020, 44, 7254–7267. [Google Scholar] [CrossRef]
- Dai, H.F.; Wei, X.Z.; Sun, Z.C. Recursive Parameter Identification of Lithium-Ion Battery for EVs Based on Equivalent Circuit Model. J. Comput. Theor. Nanosci. 2013, 10, 2813–2818. [Google Scholar] [CrossRef]
- Xia, B.Z.; Zheng, W.H.; Zhang, R.F. A Novel Observer for Lithium-lon Battery State of Charge Estimation in Electric Vehicles Based on a Second-order Eguivalent Circuit Model. Energies 2017, 10, 1150. [Google Scholar] [CrossRef]
- Yang, S.C.; Deng, C.; Zhang, Y.L.; He, Y. State of Charge Estimation for Lithium-ion Battery with a Temperature-compensated Model. Energies 2017, 10, 1560. [Google Scholar] [CrossRef] [Green Version]












| Items | Specifications (Value) |
|---|---|
| Cell chemistry | LiCoO2 |
| Size | 6.6 × 33.8 × 50 mm |
| Rating capacity (Crat) | 1.35 Ah |
| Upper cut-off voltage | 4.2 V ± 50 mV |
| Lower cut-off voltage | 2.7 V |
| Cyc | R0/mΩ | R1/mΩ | C1/F | R2/mΩ | C2/F |
|---|---|---|---|---|---|
| 1000 | 96.87 | 36.89 | 1105 | 19.85 | 7783 |
| 800 | 92.50 | 36.31 | 945 | 19.03 | 7308 |
| 600 | 90.58 | 35.72 | 863 | 18.67 | 6578 |
| 300 | 88.64 | 33.87 | 678 | 18.32 | 5153 |
| 200 | 87.75 | 33.33 | 596 | 17.88 | 4775 |
| 100 | 86.49 | 32.76 | 478 | 17.62 | 4737 |
| 30 | 85.25 | 32.14 | 450 | 17.53 | 4568 |
| 01 | 83.41 | 31.10 | 438 | 17.36 | 4537 |
| Step 1: Initialization. Given the initial guess values , and . |
| Step 2: Time Update. (1) State priori estimate (2) Error covariance |
| Step 3: Measurement Update. (1) Innovation (2) Kalman gain (3) Adaptive law ,, (4) State estimate (5) Error covariance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, N.; Pang, H. Study on Co-Estimation of SoC and SoH for Second-Use Lithium-Ion Power Batteries. Electronics 2022, 11, 1789. https://doi.org/10.3390/electronics11111789
Jiang N, Pang H. Study on Co-Estimation of SoC and SoH for Second-Use Lithium-Ion Power Batteries. Electronics. 2022; 11(11):1789. https://doi.org/10.3390/electronics11111789
Chicago/Turabian StyleJiang, Nan, and Hui Pang. 2022. "Study on Co-Estimation of SoC and SoH for Second-Use Lithium-Ion Power Batteries" Electronics 11, no. 11: 1789. https://doi.org/10.3390/electronics11111789