1. Introduction
In recent years, permanent magnet synchronous motors (PMSMs) have been widely used in many area of production and life due to their many advantages, such as high power density, simple structure, and small size. At the same time, the requirements for its control accuracy and smoothness of operation are becoming more stringent [
1,
2]. In the control of a permanent magnet synchronous motor, the design of the current loop controller, the performance of the torque control, and the improvement in the dynamic performance of the speed controller are based on key parameters such as the stator winding resistance, the stator winding cross- and direct-axis inductance, and the magnetic linkage of the permanent magnet [
3,
4,
5]. However, since the PMSM drive system is a nonlinear time-varying system, the resistance, inductance, magnetic linkage parameters, and moment of inertia are subject to changes during actual operation due to temperature, magnetic saturation, and load perturbations [
6,
7]. That is, the parameters of the permanent magnet synchronous motor dynamically change under different operating conditions. Therefore, to improve the overall PMSM drive system, accurate identification of the motor parameters is key in controlling performance.
For the parameter identification of PMSMs, many scholars at home and abroad have conducted research and proposed various parameter identification methods such as ordinary least squares, the extended Kalman filter algorithm, the model reference adaptive system method, and an artificial intelligence algorithm [
8,
9,
10]. The ordinary least squares objective function is simple, its minimum objective function value is zero, and its computational effort is moderate. However, in the process of nonstationary condition optimization, the tracking ability of the objective function is poor and more sensitive to external disturbances [
11,
12]. The model reference adaptive system algorithm [
13] can guarantee the asymptotic convergence of the parameters to be identified. However, in the process of simultaneous identification of multiple parameters, designing the adaptive rate to meet the requirements of system stability is time-consuming. Therefore, a step-by-step approach is often used to identify the parameters, i.e., inductance first, then resistance, and magnetic linkage. However, the accuracy of motor resistance and magnetic linkage is strongly influenced by inductance. Therefore, the accuracy of the identification results needs to be further improved. The extended Kalman filter is a generalization of the Kalman filter for nonlinear system applications, which can provide state estimation in the sense of minimum variance for nonlinear systems under noisy environments. However, the parameters to be discriminated need to be processed into state quantities. The identification process is more complicated [
11,
14].
The artificial intelligence algorithm has a simple structure and strong selection ability, and is suitable for nonlinear systems. It has been applied to the field of parameter identification of permanent magnet synchronous motors and has broad application prospects [
15]. Zhang et al. [
16] proposed a variable-step adaline neural network surface-mounted PMSM parameter identification algorithm to address the parameter identification error caused by inverter nonlinearities, and the error of the identification results was significantly reduced and converged faster. The neural-network-based convergence algorithm combined with the least square mean weight convergence has higher accuracy and faster convergence; however, the stability and speed of the recognition system depend on the selection of the convergence factor, and the neural network function approximation is sensitive to the training data [
17,
18]. Additionally, such algorithms cannot estimate the rotor magnetic chain and winding resistance directly from the
d–q equation of a conventional PMSM [
19]. Based on bimodal adaptive wavelet particle swarm optimization, this algorithm uses adaptive wavelet operators for individual particle extrema to enhance the forward and backward learning ability of particles and make them solve collaboratively to improve the convergence speed and search accuracy, but the complexity of its algorithm leads to a huge computational burden, making this type of algorithm currently mostly limited to theoretical research [
20,
21].
In PMSM for multiparameter identification, the traditional identification methods generally suffer from the problem of under-ranking, that is, the number of unknown parameters to be identified exceeds the rank of the control system equations, which leads to large errors in the identification results [
22]. To this end, Zhou et al. [
23] addressed the multiparameter discrimination under-rank problem by constructing a second-order steady-state equation. Rong. [
24] proposed an adaptive linear element neural network (ANN) parameter online identification method based on load testing for the under-rank problem in parameter identification of a surface-type permanent magnet synchronous motor (SPMSM) at stationary state. Zhang et al. [
25] and Feng et al. [
26] both proposed a method of injecting
d-axis negative sequence current in a short time, which effectively solves the problem of under-ranking of the mathematical model of permanent magnet synchronous motors and can quickly achieve simultaneous multiparameter identification in. However, the solution of the multiparameter identification under-rank problem by the additional injection of the
d-axis current method is operationally complicated and does not work for some applications.
In this study, intelligent algorithms were combined with model-referenced adaptive methods to solve the defects of the above parameter identification algorithms. A multiparameter identification of PMSM, based on model reference adaptive-simulated annealing particle swarm optimization (MRAS-SAPSO), was constructed. The problems of low convergence accuracy, weak anti-interference ability, and the limited number of identification parameters of the model reference adaptive system algorithm were overcome by using particle swarm optimization to find the best capability. At the same time, the simulated annealing algorithm was introduced to improve the optimal search strategy of particle swarm, which overcomes the limitation of particle swarm optimization easily falling into the local optimum, so produces a more accurate recognition effect.
2. Permanent Magnet Synchronous Motor Mathematical Models
Under ideal conditions, the phase current and the permanent magnet magnetic linkage in a PMSM system have only fundamental components, and the
d–q axis voltage and current are DC. However, in actual applications, PMSMs have a distorted magnetic field, and the inverter, in the process of inverting, is affected by factors such as inverter dead time and tube voltage drop, which have a more significant impact on the recognition accuracy. When the motor is running at high speed, the influence is small and can be ignored [
27]. Therefore, in order to avoid the influence of nonlinear inverter factors on the parameter identification results, we investigated the parameter identification problem of a PMSM under high-speed operation. The mathematical equations of a PMSM in the synchronous rotation
d–
q axis coordinate system are usually described as follows [
28]:
where
ωe =
pnωm;
ud and
uq are the two-phase rotating coordinate system
d–q axis voltages (V);
R is stator phase resistance (Ω);
id and
iq are two-phase rotating coordinate system
d–
q axis currents (A);
ψd and
ψq are the flux linkage in the
d–
q rotating coordinate system (Wb);
ωe is the electrical angular velocity (rad/s);
Ld and
Lq are the two-phase rotating coordinate system
d–q axis inductances (H);
ψf is the stator flux linkage with the field (rotor) flux (Wb);
ωe is the electrical angular velocity (rad/s);
ωm is the mechanical angular velocity (rad/s);
pn is the number of pole pairs;
J is the moment of inertia of the motor (kg·m
2);
B is the damping coefficient of the motor shaft (N·m·s/rad);
Te is the electromagnetic torque (N·m);
TL is the motor load torque (N·m).
3. Model Reference Adaptive Simulated Annealing Particle Swarm Optimization Hybrid Algorithm
3.1. The Algorithm of the Model Reference Adaptive System
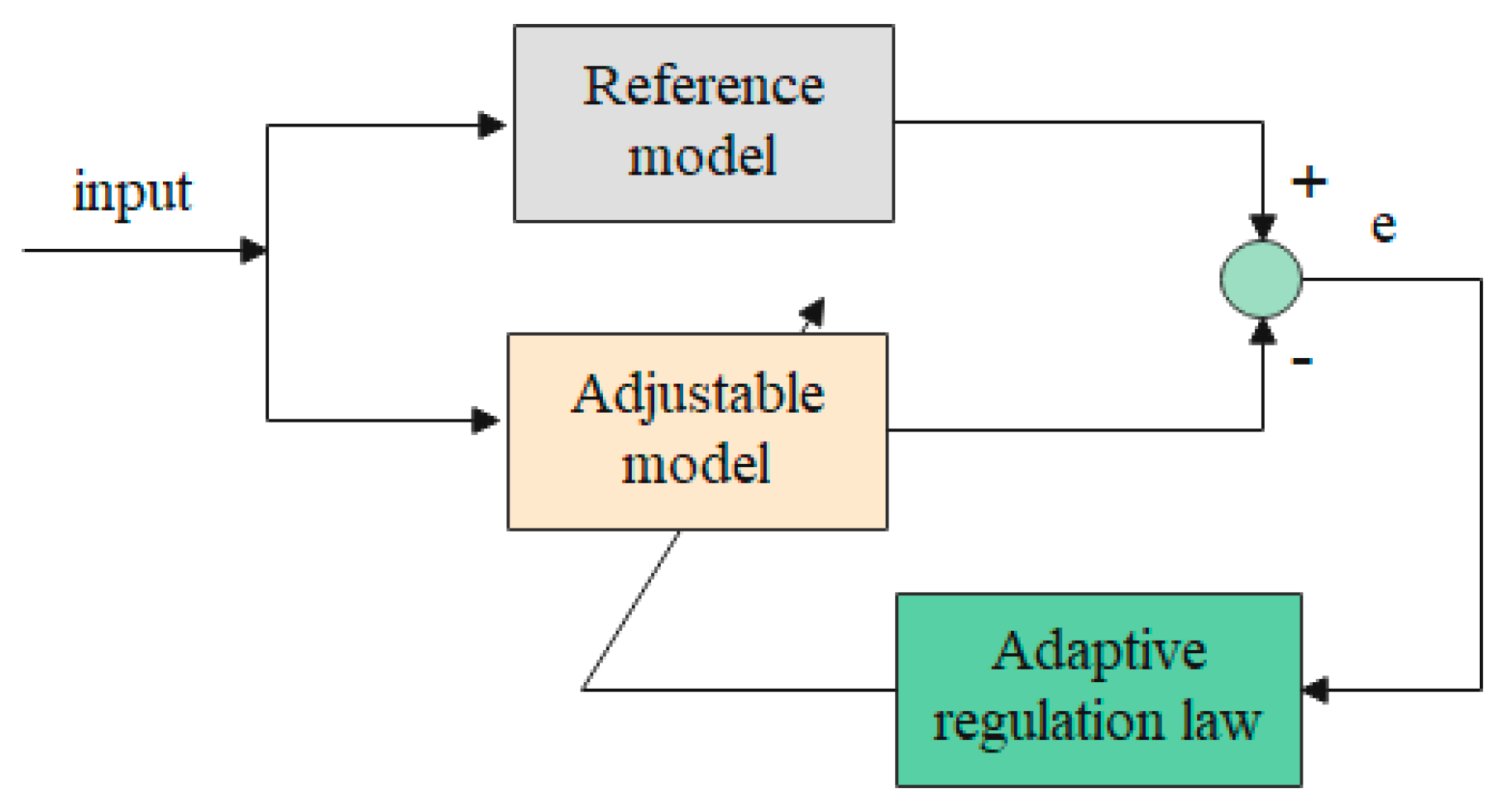
The structure of a typical model reference adaptive system algorithm (MRAS) system consists of 3 parts: the reference model, the variable model, and the adaptive law (where the model containing the parameters to be estimated is treated as a variable model). By constructing two models with the same output quantity, when the comparison of the adjustable model and the reference model produces error values, the difference is corrected by using the adaptive parameter law. Finally, the same control output of the adjustable model and the reference model can be obtained [
29,
30]. Its schematic block diagram is shown in
Figure 1.
3.2. The Simulated Annealing Particle Swarm Algorithm
Particle swarm optimization (PSO) uses a velocity-position search approach, treats the potential solution of each optimization problem as a particle in the search space, and defines the optimal solution found by the particle as the individual optimal solution
Pbest, and the optimal solution found by the whole population
gbest as the current global optimal solution. The iterative process continuously adjusts the position and velocity of the particles, thus updating the individual optimal global of the particles and the current global optimal solution until the global optimal solution of the optimization problem is found in the search space. The iterative formulation of PSO is [
31]:
where
vi is the speed at which the
ith particle flies;
K is the number of iterations;
ω is the inertia weight;
c1 and
c2 are learning factors;
xi is the position of the
ith particle.
Due to the weak global search capability of PSO and the defect of easily falling into local optimum, we introduced the simulated annealing algorithm for correction. The simulated annealing algorithm (SA) [
31,
32] is a heuristic algorithm that extends the local search algorithm into a global search algorithm, whose core idea is to accept new states with a certain probability at each iteration. Specifically, at temperature
T, a new state
g is generated from the current state
i. The energies of the two are
Ei(
k) and
Eg, respectively. If
Eg <
Ei(
k), the new state is accepted. Otherwise, the state
g is accepted with probability e^−[(
Ei(
k) −
Eg)/
Ti], i.e.,
where
Ei(
k) denotes the internal energy of the
ith particle at the
kth iteration, i.e., the fitness value of the current particle;
Eg denotes the internal energy of the current population optimum;
Ti denotes the current temperature.
SA has a certain probability of accepting a function adaptation value larger than the current one as a new state at the higher temperature, thus jumping out of the local optimum. Therefore, combining SA and PSO increases the stochasticity of the early search, and enables the algorithm to better converge to the global optimum later in order to improve the global search capability of PSO.
3.3. Model Reference Adaptive Simulated Annealing Particle Swarm Optimization Algorithm
The structure of the model reference adaptive algorithm is simple, and the design of the adaptive regulation law that enables the state to stabilize at the equilibrium point is the core of its control. The selection of the parameters of the adjustable model of the process has a large impact on the recognition effect, and the correct convergence of the parameters depends on the selection of the initial values of the parameters, which has a certain randomness [
13,
29]. The SAPSO algorithm not only has the advantages of traditional PSO with few control parameters and good convergence, but also overcomes the difficulty of easily falling into local optimal solutions during the search process. However, the intelligent algorithm needs to process a large amount of data in the process of finding the optimal solution, which is computationally intensive and has high equipment requirements. Therefore, a simulated annealing particle swarm model reference adaptive system hybrid algorithm is proposed. The idea of this algorithm is to first use the model reference adaptive system to output the optimal adjustable variable, and then use the variable as the initial population of SAPSO to derive the optimal solution after the particle search. The specific process is as follows:
Step 1: Set the parameters related to the MRAS, construct the adjustable model and Lyapunov adaptive mediation rate, and calculate the relevant parameters in the adjustable model according to the parameters of the input system.
Step 2: Set the relevant PSO parameters, invoke the optimization parameters derived from the MRAS algorithm as the initial particles of the simulated annealing particle swarm algorithm, and calculate the individual optimal solution pbest and fitness values of the particles.
Step 3: Update the global optimal solution gbest and the individual optimal solution pbest of the particle and assign the current position of the particle to pbest if the fitness of its current position is smaller than the fitness of its pbest. If the fitness of the particle with the smallest fitness among all the current particles is smaller than the fitness of gbest, then assign the particle to gbest.
Step 4: The probability Pi(k) of accepting a new solution is calculated according to Equation (3) of the simulated annealing algorithm. Additionally, the metropolis criterion is used to compare the probability Pi(k) with rand() to determine whether the global optimal solution is replaced by the generated new solution for the annealing operation, update the temperature, and run until the set step size.
Step 5: Check if the maximum number of iterations kmax is reached. If kmax is not reached, return to Step 3.
Step 6: The current optimal particle is output, i.e., the result of the optimization search, and the algorithm is terminated.
4. Multiparameter Identification of Permanent Magnet Synchronous Motor Based on Model Reference Adaptive System Simulated Annealing Particle Swarm Optimization
PMSM parameter identification can be transformed into a system optimization problem, where ud, uq, we, and Tm are used as inputs to the PMSM identification model and measurement signals. The MRAS-SAPSO algorithm is used to identify the appropriate PMSM parameter values so that the sum of squared errors between the identification model and the measurement signals, i.e., the objective function fitness value, is minimized, thus completing the PMSM parameter identification process.
The mathematical model of the current of the permanent magnet synchronous motor in the
d–q rotating coordinate system is:
According to Equation (4), the rank of the equation is 3. If the number of identification parameters exceeds 3, there is an identification under-rank problem. In this paper, the rank of the equation is increased by discretization of Equation (4) and the collection of cross-axis current, voltage, and angular velocity at different moments, to solve the under-rank problem of PMSM multiparameter identification.
Assuming that time
k is the current time and time
k − 1 is the previous time, Equation (4) is discretized to obtain [
33]:
where:
Ts is the sampling period.
Assuming that t1 is the current time, t2 = t1 − 1; t3 is the historical time, and t3 ≠ t1, t4 = t3 − 1. Collect the AC/DC axis current, voltage, and electrical angular velocity signals at the corresponding time, substitute them into Equation (5), and combine them into a new equation group to obtain:
Therefore, according to Equation (6), the rank of the equation is 6 and the number of variables is 6, so multiparameter simultaneous identification can be carried out. As can be seen from Equation (4), the first two parts of the equation have only electrical parameters
R,
L (when
Ld =
Lq, note that
Ld =
Lq =
L), and
ψf. The last part of the equation contains electrical parameters
ψf as well as mechanical parameters
J and
B. Therefore, the electrical and mechanical parameters of the PMSM can be identified separately. Separate identification can effectively avoid the problem of poor identification accuracy caused by the coupling between the two. In this paper, the first two parts of Equation (4) are used to identify
R,
L, and
ψf. Then, the
ψf results obtained from the identification are substituted into the last part of Equation (4) to finally identify the mechanical parameters
J and
B to solve the problem of multiparameter under-ranking [
34,
35].
In this paper, firstly, the electrical parameters (R, L, and ψf) of PMSM are identified by MRAS algorithm. Secondly, the SAPSO algorithm calls the ud, uq, id, iq, and ωe collected in the PMSM system and uses the R, L, and ψf obtained by MRAS as the initial particles to calculate the discriminative model-based currents ( and ) by Equation (4). After the algorithm obtains the discriminative model currents, it calculates the fitness function value of each particle based on its difference with the system input (id and iq). It continuously updates the population’s history of global optimal particles and each particle history’s optimal particles. Finally, the optimal particle is optimized again by simulating annealing to avoid the optimal particle as an optimal local solution, and so on, until the algorithm meets the termination condition. The output population at the termination of the algorithm is the multiparameter value of the PMSM.
Note that
α =
R/
L; then, the adjustable model system equation of the MRAS algorithm and the adaptive regulation law equation [
36] designed based on Lyapunov stability theorem are:
where
R0,
L0, and
ψf0 are the initial values of the parameters to be identified, and
KL,
KR, and
Kψf are the corresponding regulation gains.
The fitness function of electrical parameters in the paper is
fitness_elec:
The fitness function of mechanical parameters is
fitness_mech:
where
n is the number of arrays sampled; here,
n = 1000.
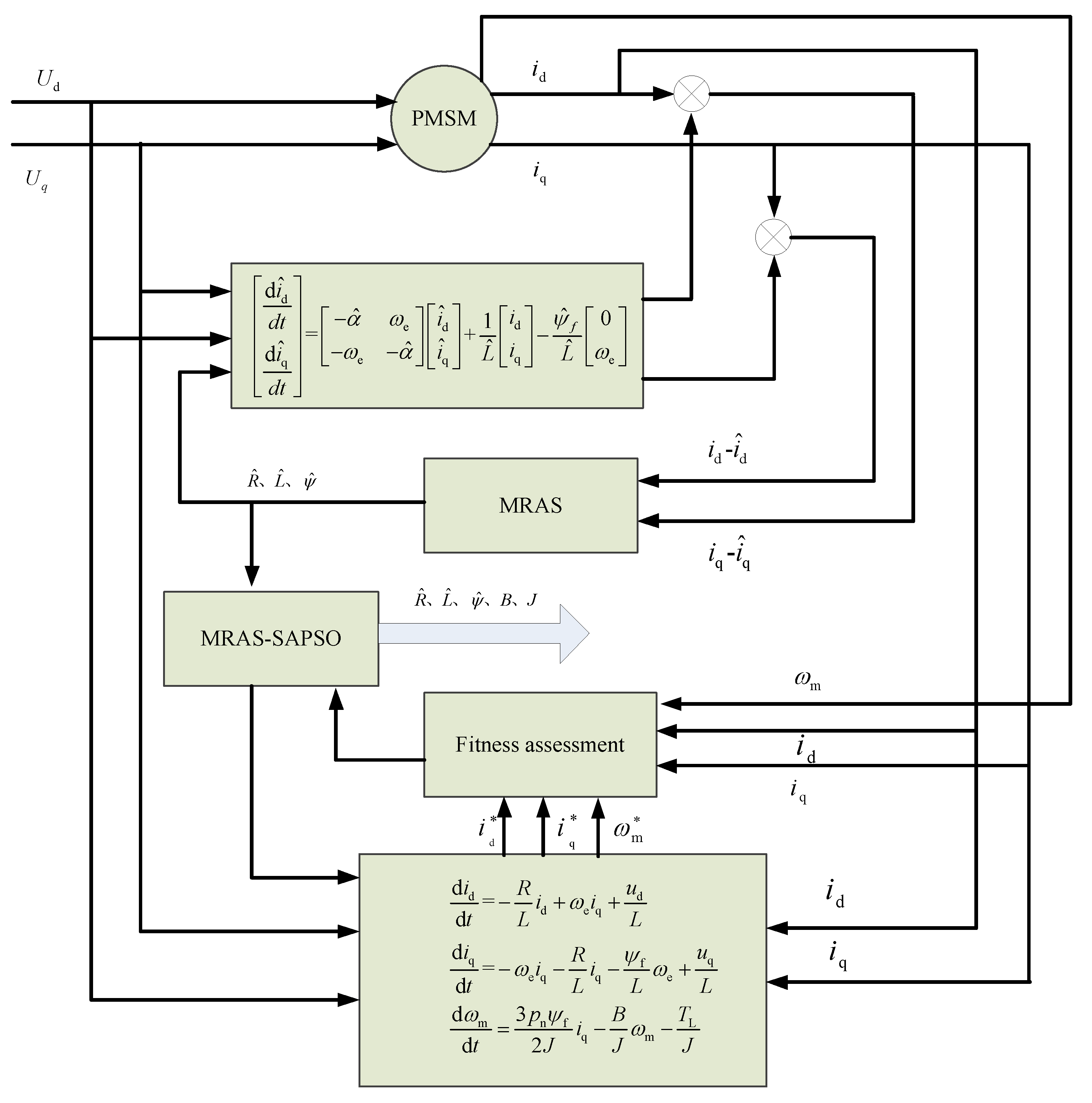
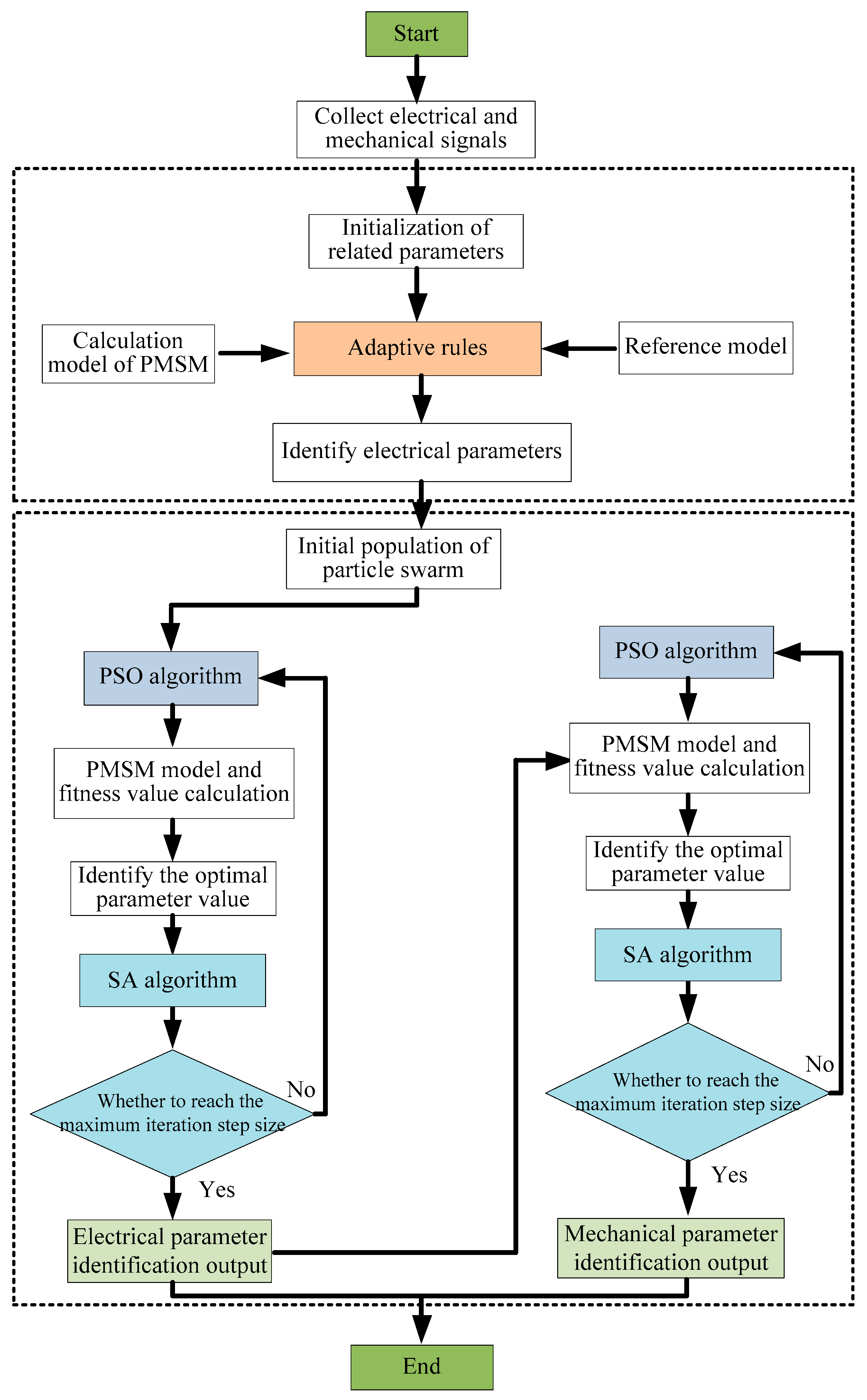
The principle and flow of multiparameter identification of a PMSM based on MRAS-SAPSO are shown in
Figure 2 and
Figure 3, respectively.
5. Simulation Experiment and Result Analysis
In order to verify the performance of the multiparameter identification of a PMSM based on the proposed MRAS-SAPSO algorithm and to avoid the influence of electrical sampling accuracy and experimental environment factors on the parameter identification results, the modeling and algorithm verification analysis was carried out by MATLAB simulation software in this paper. Firstly, a simulation model of the PMSM control system was built based on the Simulink environment, and an MRAS algorithm was established to identify the electrical parameters of PMSM. Subsequently, the required system inputs
id,
iq,
ud,
uq, and
wm, as well as the identified electrical parameters
R,
L, and
ψf, were called from the workspace through the m-file. The basic PMSM parameters are shown in
Table 1.
In the multiparameter identification of a PMSM based on MRAS-SAPSO, the number of particles was 150, the maximum number of iterations was 200, the inertia weight
w decreased linearly from 0.8 to 0.2, and the acceleration factor
c1 =
c2 = 1.2. In the simulated annealing, the maximum number of iterations in the algorithm was 50, the initial temperature was 50, the maximum temperature was 0.001. The initial values of parameter identification based on the MRAS method were
L0 = 1 × 10
−3 H,
R0 = 1 Ω,
ψ0 = 0.3 Wb. In order to compare and analyze the performance of the MRAS-SAPSO algorithm, the multiparameter identification of a PMSM based on both PSO and MRAS-PSO was studied, and the relevant parameters were set exactly the same as MRAS-SAPSO. The PMSM ran at 1500 r/min and started at
t = 0.15 s. The load
T = 10 N·m was applied, and the results of the multiparameter identification of the PMSM, performed for one cycle (0.01 s) at
t = 0.3 s, are shown in
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
Figure 8.
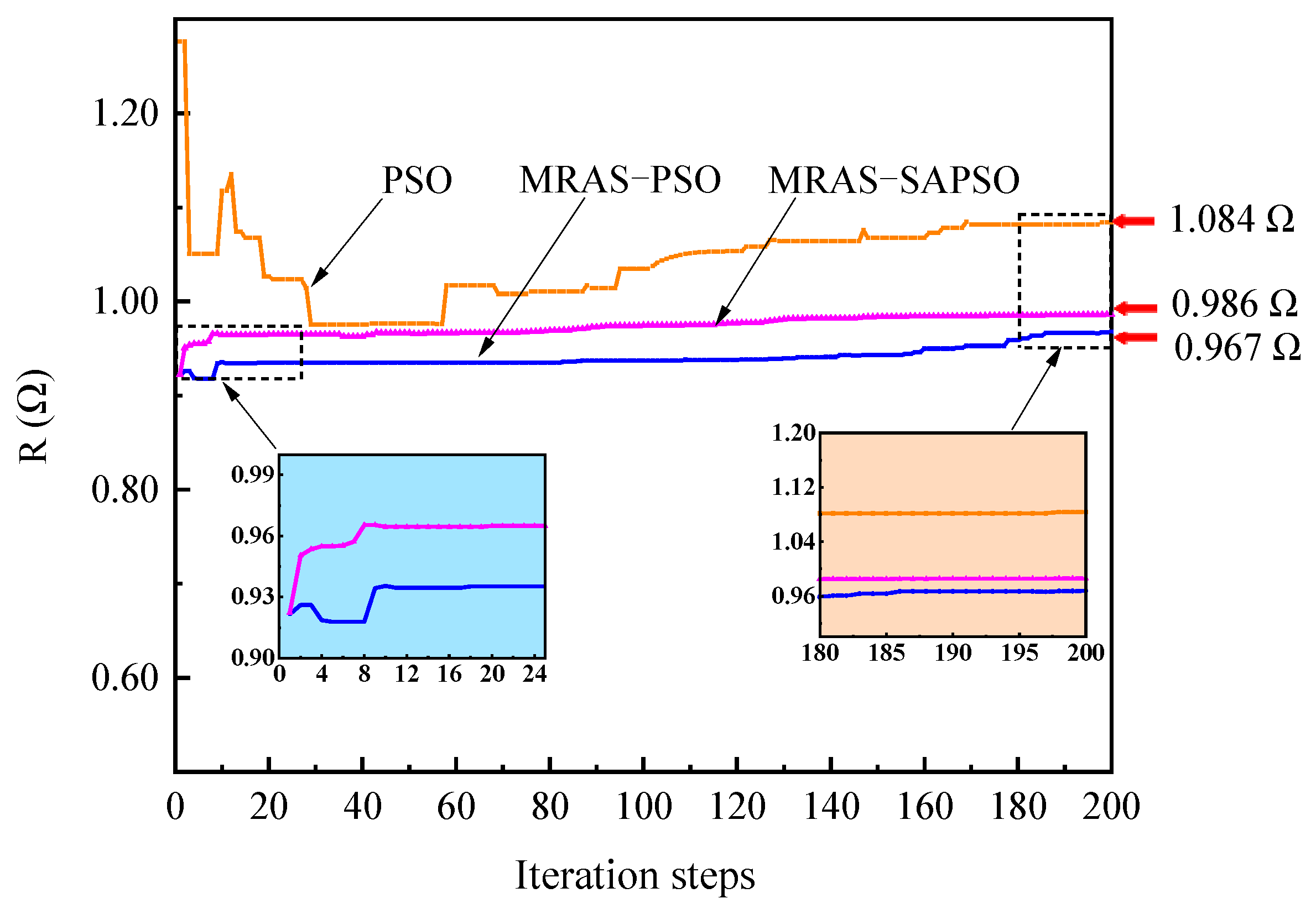
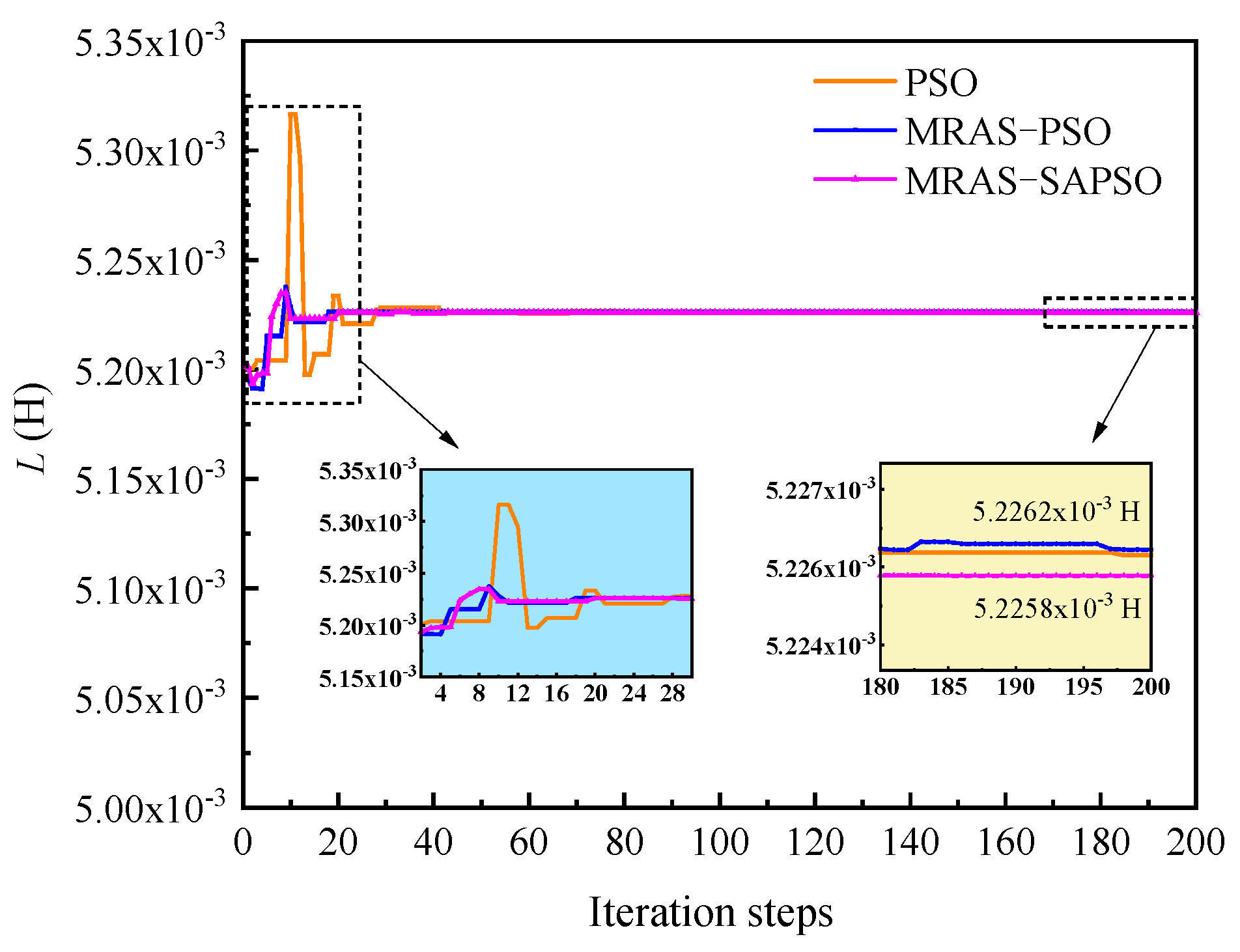
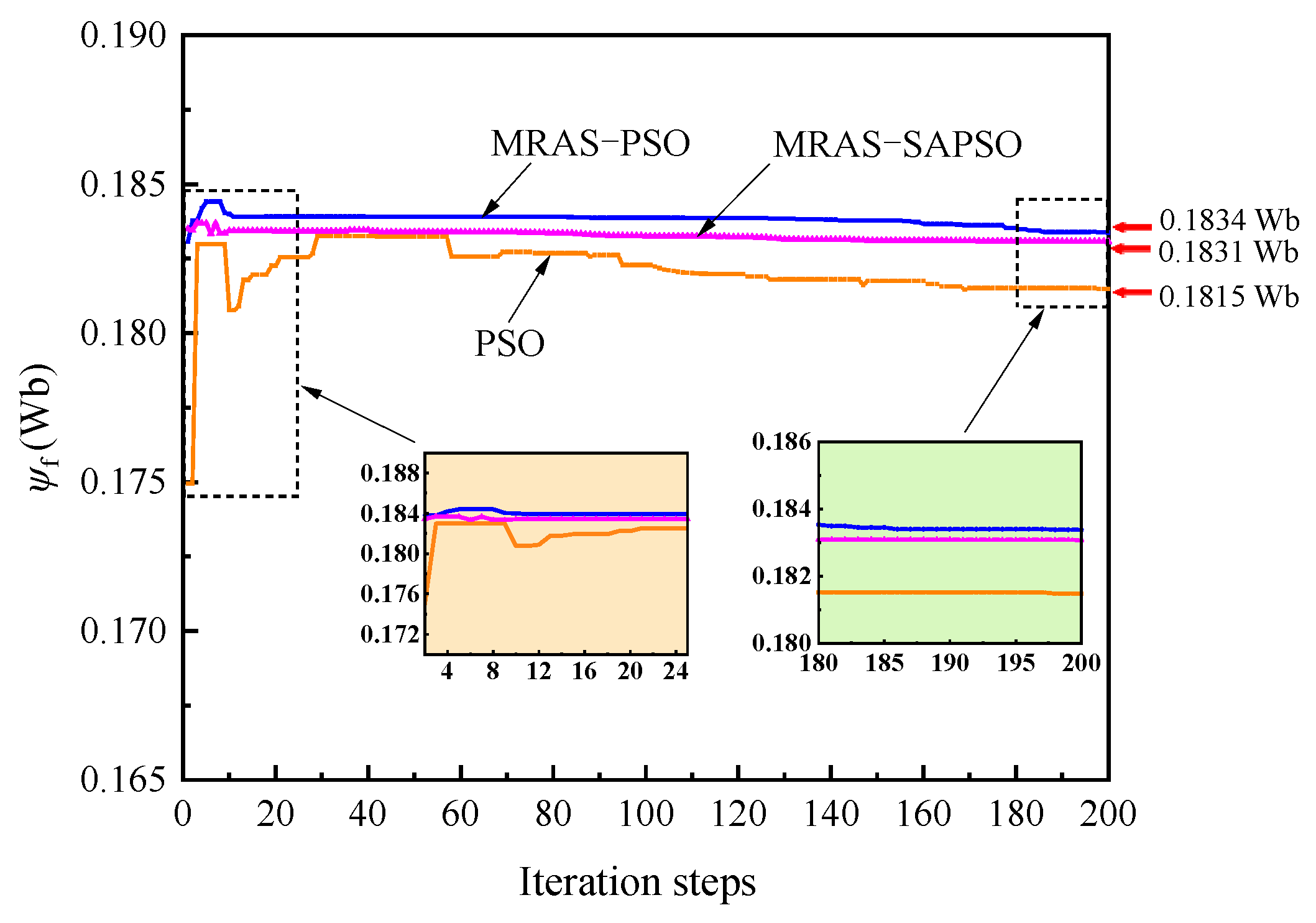
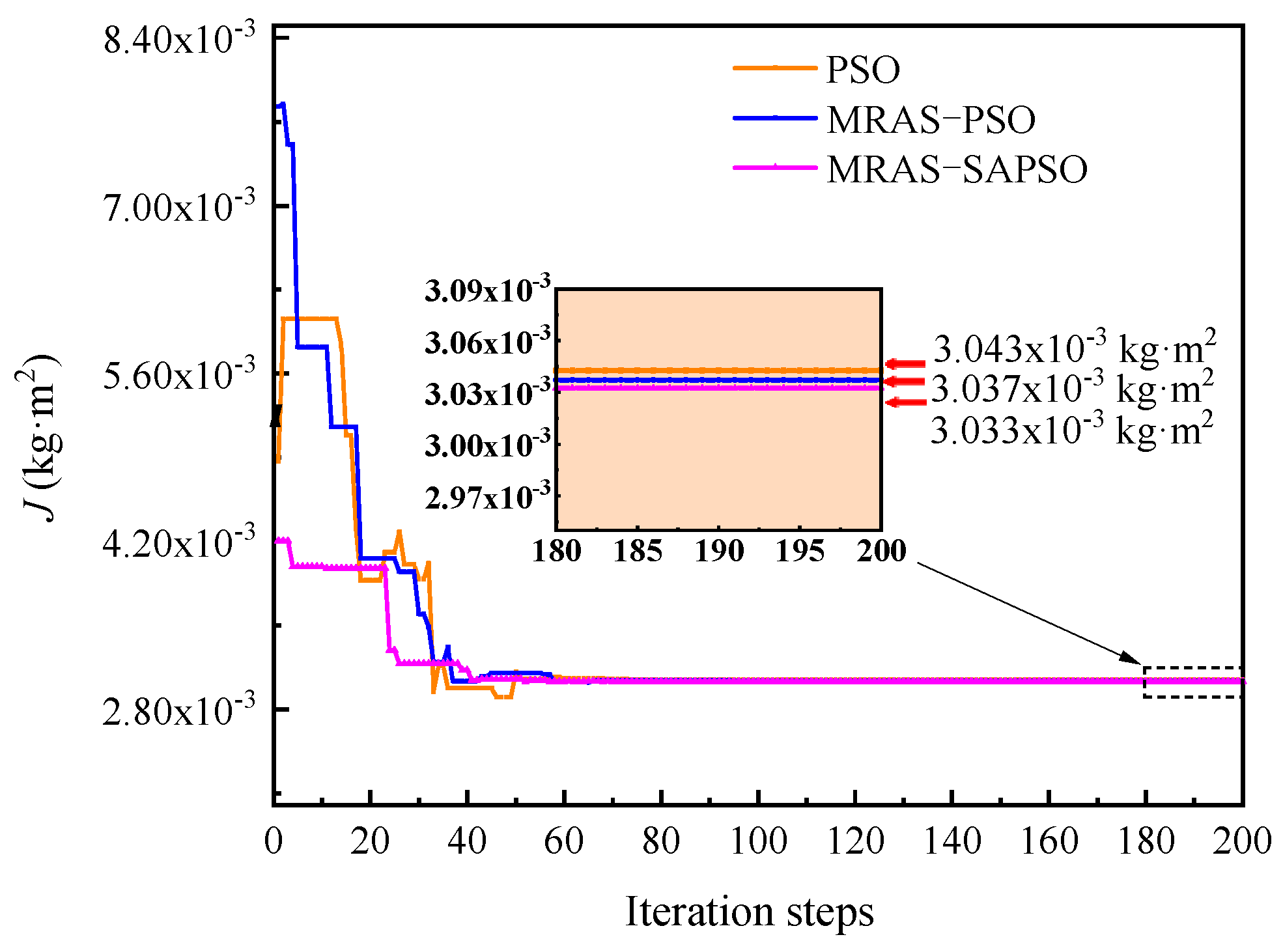
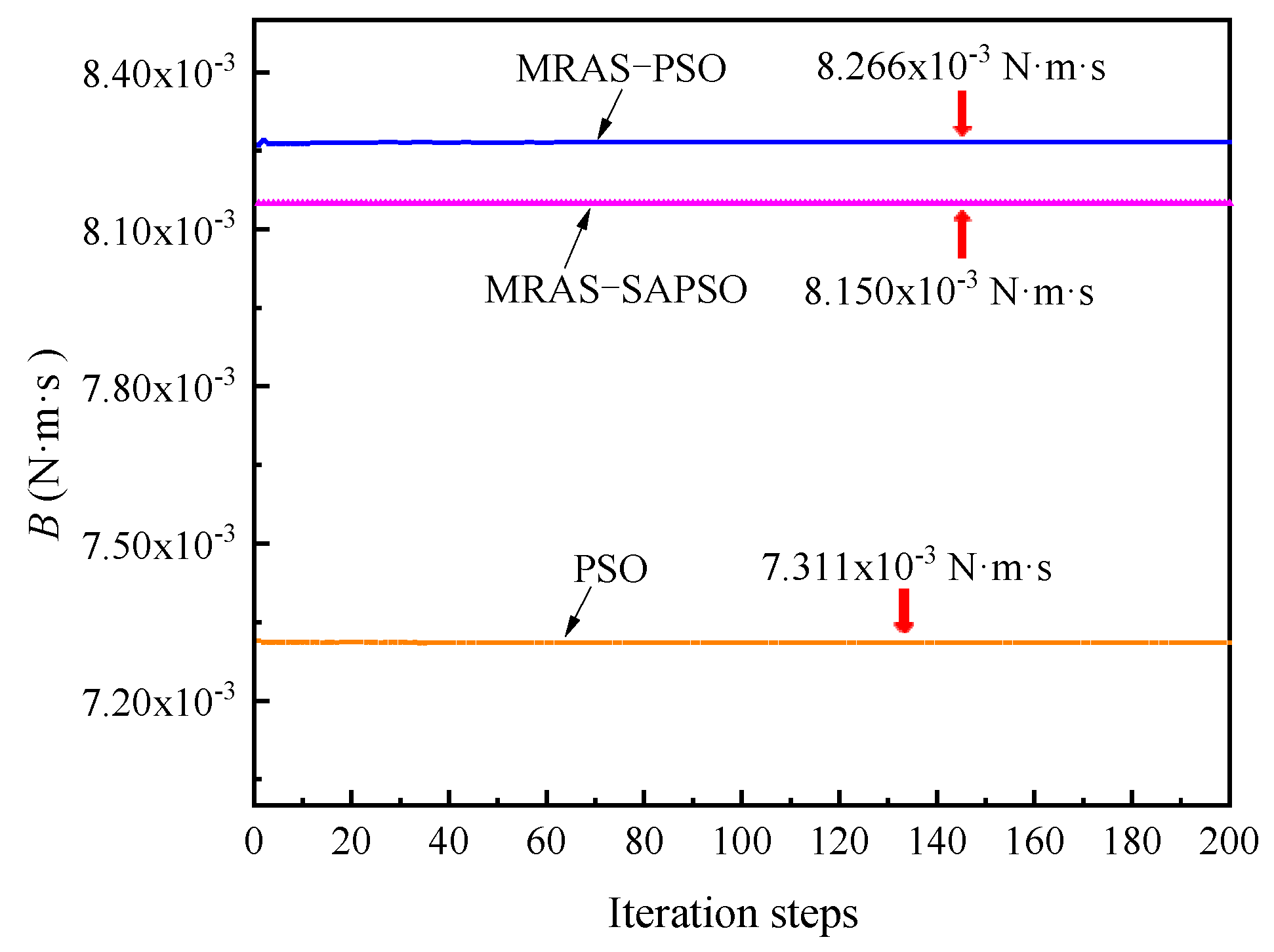
From the parameter identification curves in
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
Figure 8, it can be seen that all three algorithms, PSO, MRAS-PSO, and MRAS-SAPSO, quickly converged the identification parameters to near the true values, which indicated that all three algorithms have good global search performance. We also found that the MRAS-SAPSO algorithm best identified results closer to the true values among the three algorithms, and the five-parameter identification converges faster than both the PSO and MRAS-PSO algorithms. The results showed that the proposed multiparameter identification of the PMSM method based on the MRAS-SAPSO algorithm is feasible, and the quality of the identification results is higher. The identification results of the three algorithms with 200 iterations and the deviations from the true values are shown in
Table 2.
In
Table 2,
x is the discriminated value of the PMSM parameters, and
δ is the relative deviation between the discriminated value
x and the true value
xv, i.e.,
From the data in
Table 2, it can be seen that the deviations between the identified values of several parameters based on the MRAS-SAPSO algorithm and the true values were minimal, and none of the maximum deviations exceeded 2%. Among the five identification parameters, the identification accuracy of electrical parameters (stator winding resistance, inductance, magnetic linkage) was higher than that of mechanical parameters (moment of inertia and viscous damping coefficient). Analysis showed that reason for this finding is that the MRAS algorithm parameter identification of the three electrical parameters of stator resistance, inductance, and magnetic chain, and the results as the initial particle swarm of the SAPSO algorithm, to a certain extent, o reduce the scope of the particle swarm seeking, and improve the speed and accuracy of the particle seeking. At the same time, the SA algorithm optimizes the obtained optimal particle again to avoid the optimal particle being a local optimal solution. As a result, the identified parameters converge faster and with higher accuracy.
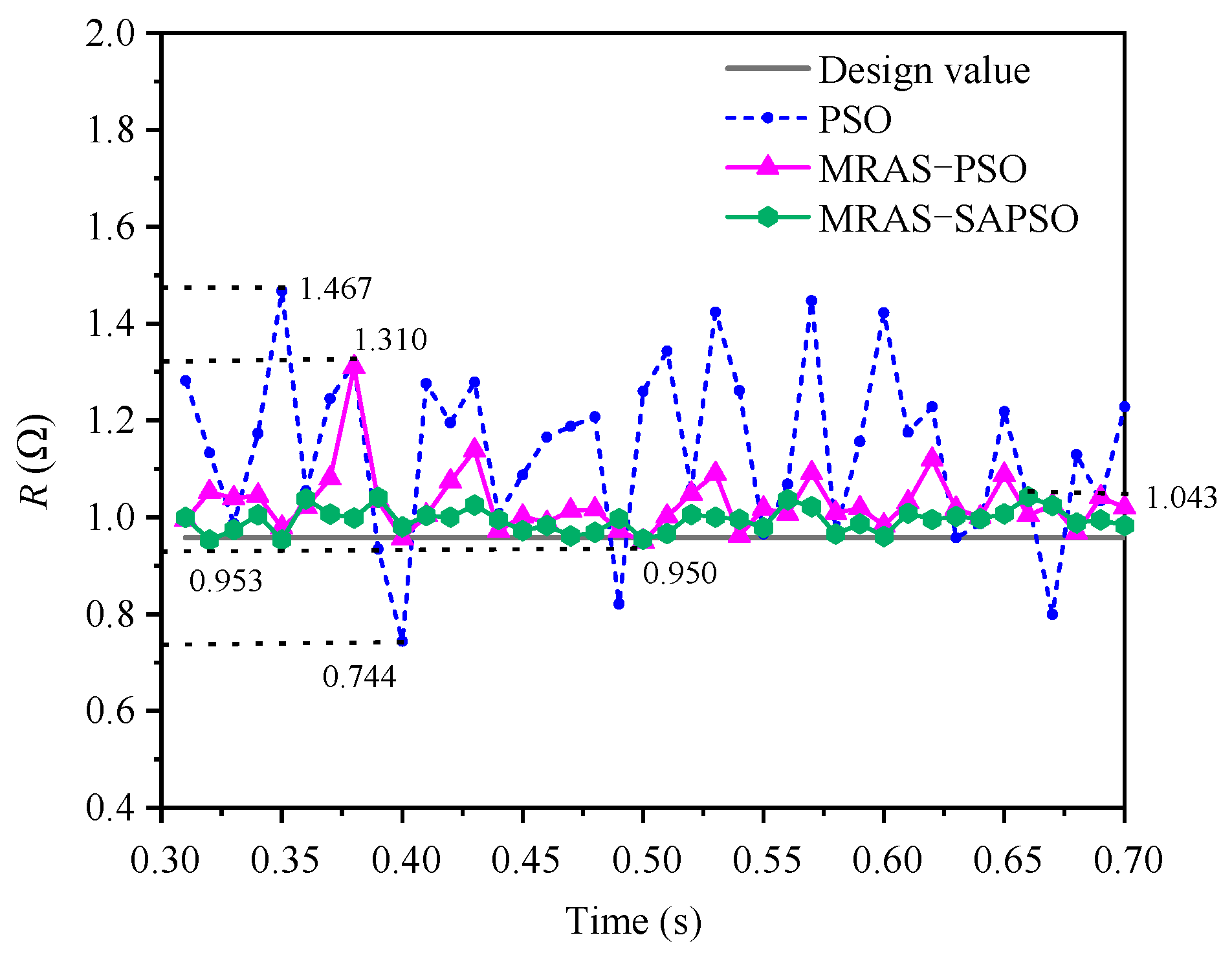
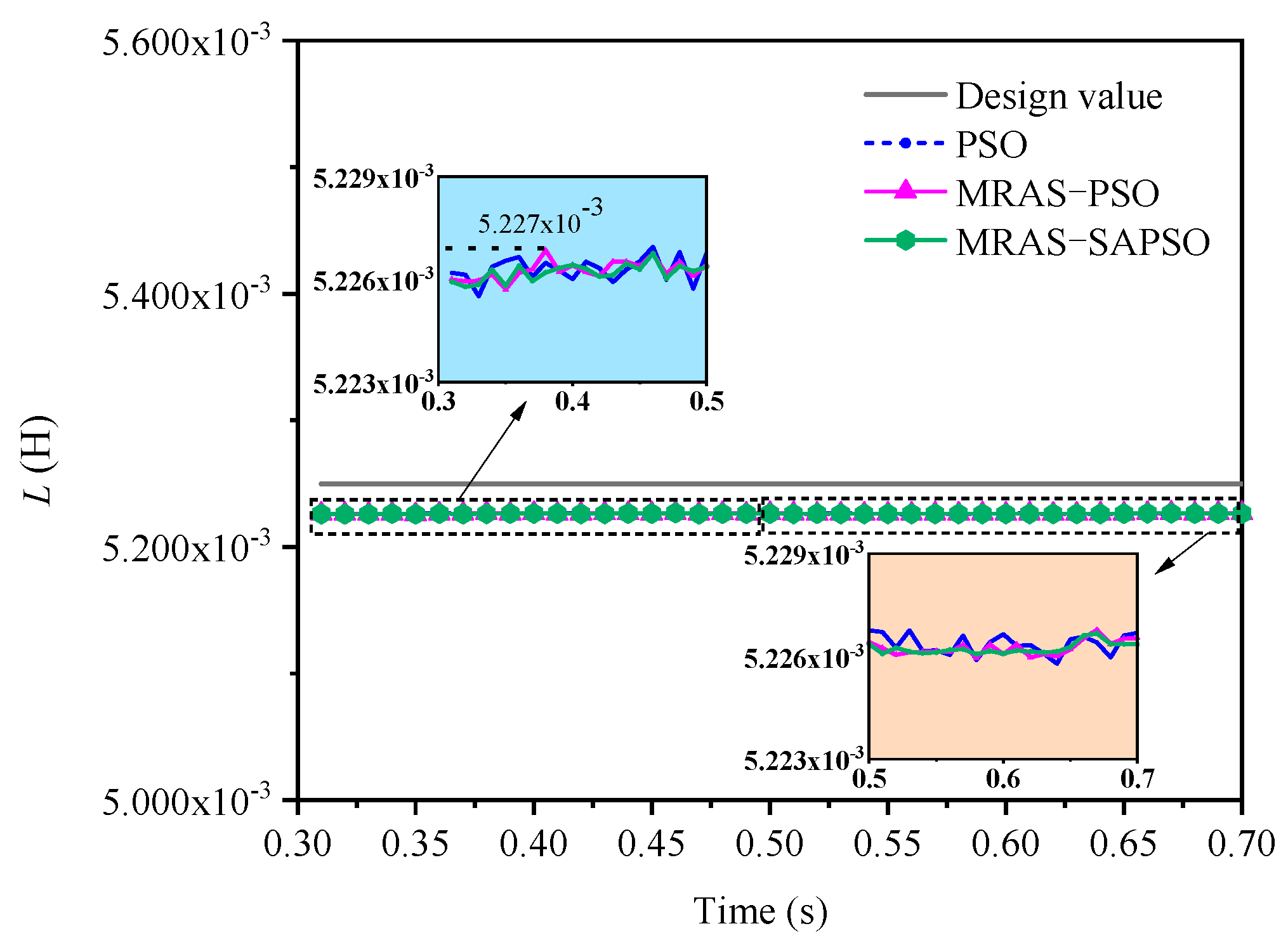
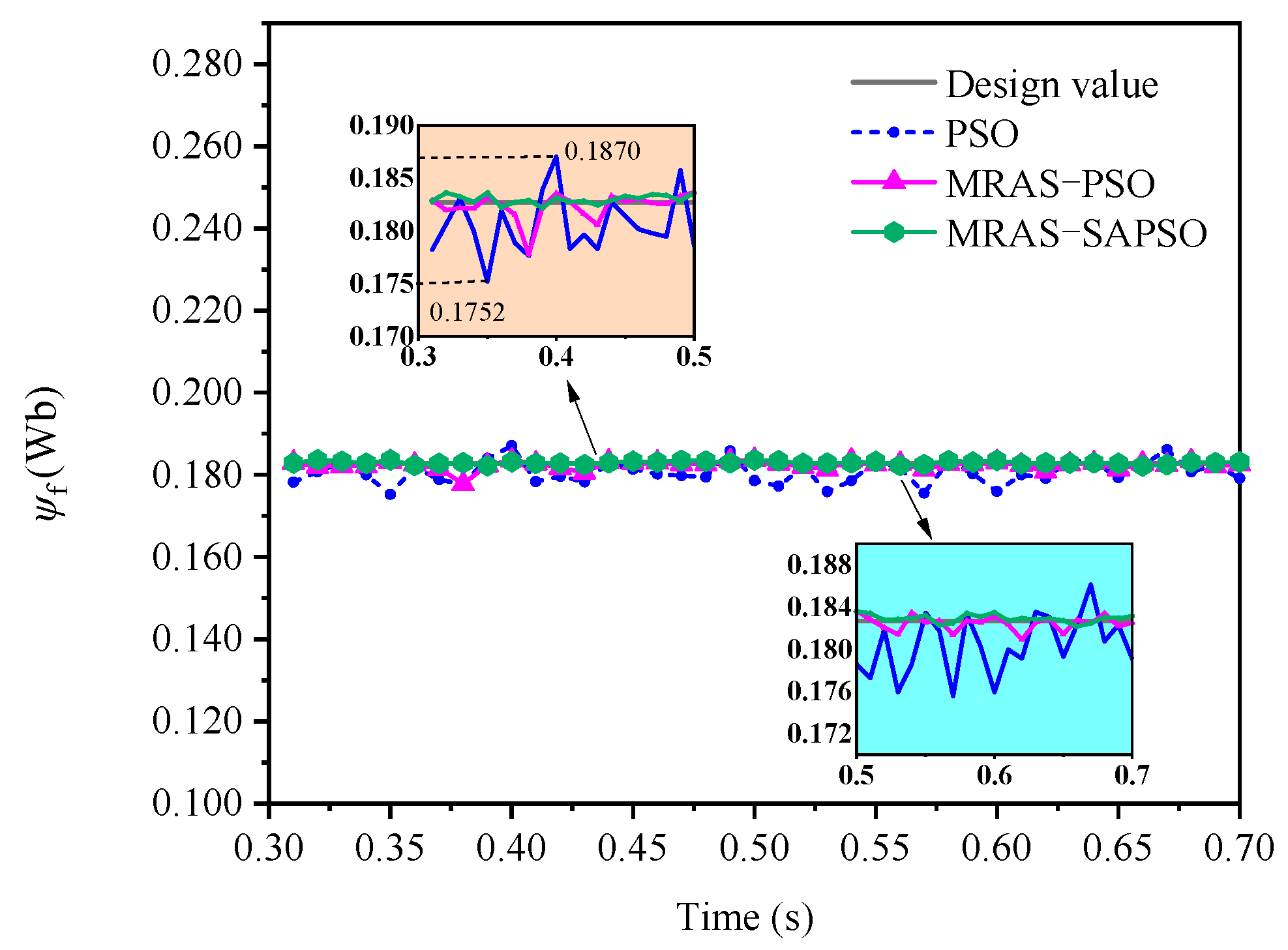
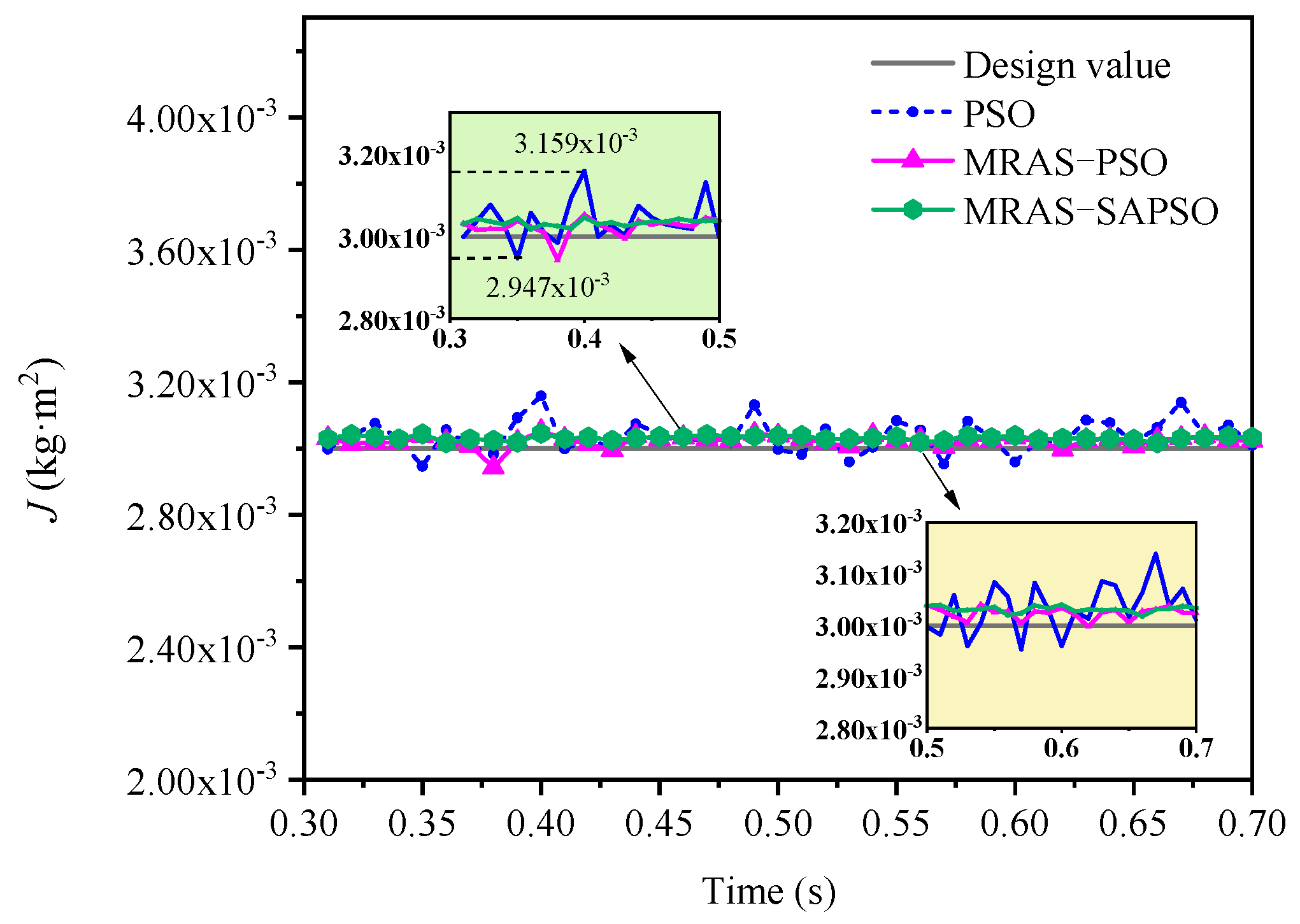
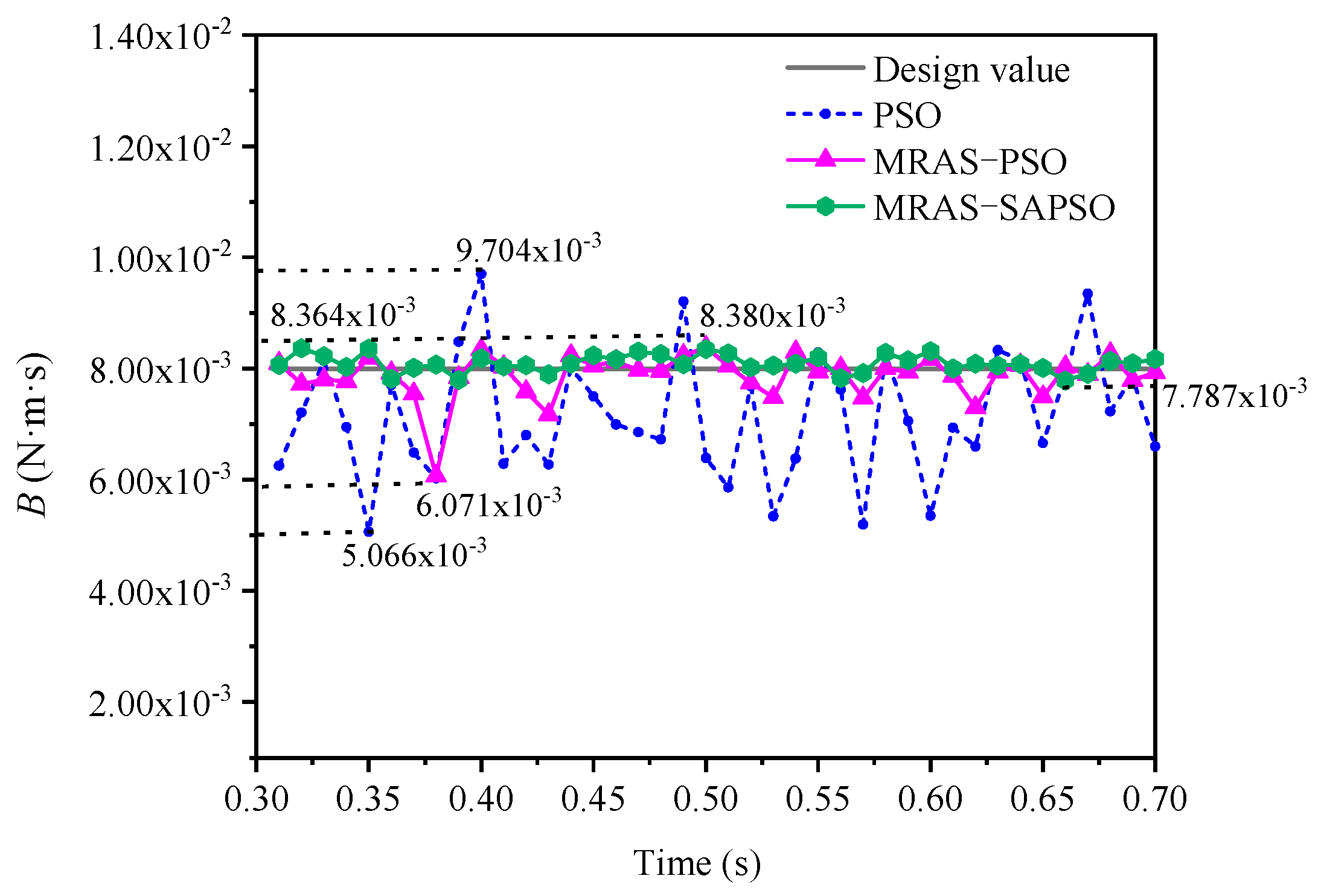
To further verify the effect of parameter identification based on the MRAS-SAPSO algorithm for PMSM operation over a period of time, the motor operation time was selected as 0.3–0.7 s and the identification time step was 0.01 s. The results of parameter identification in this time range are shown in
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
Figure 13.
As can be seen from
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
Figure 13, at 0.3–0.7 s, the results of the multiparameter identification of PMSM based on the MRAS-SAPSO algorithm showed the smallest fluctuations and the closest approximation to the true value compared to the identification results based on the PSO and MRAS-PSO algorithms. The PSO-algorithm-based PMSM parameter identification had the worst effect. The parameter values identified in adjacent time periods fluctuated the most, amongst which the identification curves of the resistance and damping coefficient fluctuated the most significantly. In order to quantitatively analyze the performance of the three algorithms in this time period of the recognition results, we defined the fluctuation deviation ∆
x =
xmax −
xmin, where
x is the average value of the recognition results in this time period and
δ is the deviation between the average value of the recognition results and the true value in this time period. The results are shown in
Table 3,
Table 4 and
Table 5.
Comparing
Table 3,
Table 4 and
Table 5, from the results of the three algorithm identifications, the highest identification accuracy of magnetic linkage and the lowest accuracy of stator winding resistance can be observed. The reason for this is that the fluctuation in the value of magnetic linkage has the strongest influence on the value of the fitness function, and the value of resistance has the lowest influence on it. The aim of PSO is to find the solution vector with the smallest fitness value. In other words, the solution vector that has the strongest impact on the fitness value tends to achieve the highest discrimination accuracy. This parameter identification law is the same as the one derived in the literature [
37]. The resistance and damping coefficients identified based on the PSO algorithm fluctuated the most, with fluctuation deviations of 0.723 Ω and 4.638 N·m·s, respectively. The errors between the mean and true values of the identification results were 16.04% and 10.73%, respectively. This indicated that the single PSO algorithm is more influenced by the initial value of particles and the randomness of particles in the process of finding the optimum, which leads to the poor stability of the final identification results and low accuracy at convergence. The mean errors of the parameters identified based on MRAS-PSO and MRAS-SAPSO algorithms were less than 2%. The deviation in the parameter fluctuation identified by the MRAS-SAPSO algorithm was significantly smaller than that of the MRAS-PSO algorithm, which further showed that the MRAS-SAPSO algorithm has the best performance, and the algorithm dramatically improves the accuracy and reliability of PMSM parameter identification results.
Based on the analysis of theoretical modeling and MATLAB simulation results, it is evident that the proposed method of using the PMSM parameters identified based on the MRAS algorithm as the initial value of the particle population in the SAPSO algorithm is feasible, and this can improve the speed and accuracy of particle finding. At the same time, the SA algorithm optimizes the obtained optimal particles again to avoid that the optimal particles being local optimal solutions. As a result, the identified parameters converge faster and with higher accuracy (as can be seen in
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
Figure 8 and
Table 2). For further verification of the effect of parameter identification based on the MRAS-SAPSO algorithm for PMSM operation over a period of time, a long-term multiparameter identification simulation experiment was conducted in this study. In
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
Figure 13 and
Table 3,
Table 4 and
Table 5, the results proved that the multiparameter identification values of a PMSM based on the MRAS-SAPSO algorithm are high quality. The proposed multiparameter identification method and identification results in this paper can provide a reference for improving the accuracy of PMSM control systems.
6. Conclusions
In this paper, we proposed a step-by-step strategy to identify multiple parameters of a PMSM based on the MRAS-SAPSO algorithm, which effectively eliminates the problem of imprecise parameter identification caused by the coupling effect between the multiple parameters of a PMSM. At the same time, the PMSM electrical parameters identified by the model reference adaptive system method are used as the initial population of PSO, which solves the difficulties experienced by traditional PSO, which is sensitive to initial values, has strong randomness and low convergence accuracy, and does not easily converge, thus improving the efficiency and accuracy of the search. Furthermore, the adaptive simulated annealing algorithm was introduced to optimize the results of multiparameter identification, avoiding the problem of the PSO algorithm search process affecting the final identification results by falling into the local optimum. The simulation experiment results showed that the MRAS-SAPSO algorithm can simultaneously identify the stator winding resistance R, inductance L, magnetic linkage ψf, moment of inertia J, and damping coefficient B in the PMSM model. The accuracy of the identification results was high, the maximum deviation from the real value was within 2%, and the identification results met the high-performance control requirements of PMSMs.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}