
Characteristic Analysis of Fractional-Order Memristor-Based Hypogenetic Jerk System and Its DSP Implementation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Solution of the Fractional-Order Memristor-Based Hypogenetic Jerk System
2.1. Description of Adomian Decomposition Method
2.2. Solution of the Fractional-Order Memristor-Based Hypogenetic Jerk System Based on ADM
3. Dynamical Analysis of the System
3.1. Dynamical Analysis with the Order q
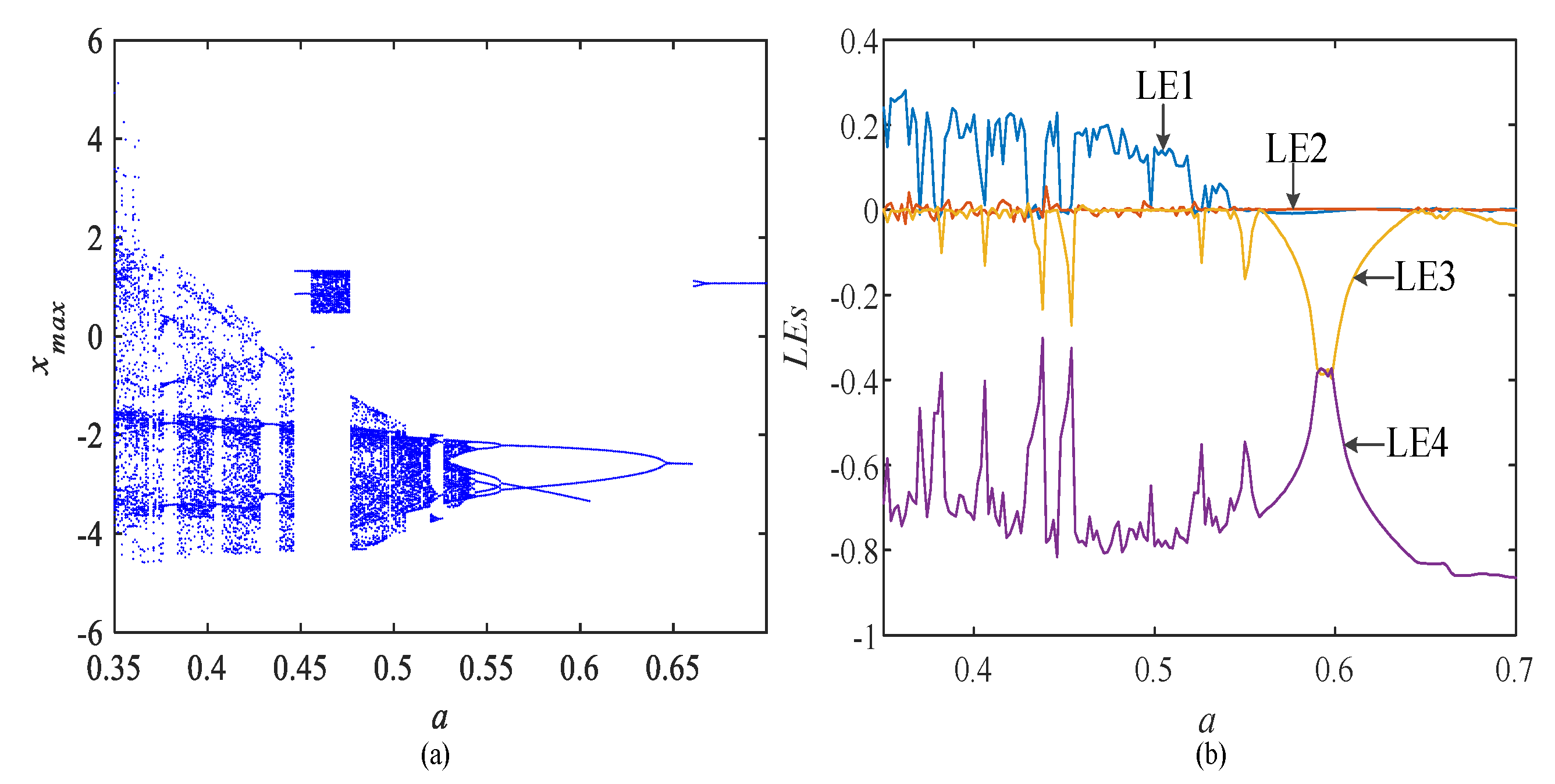
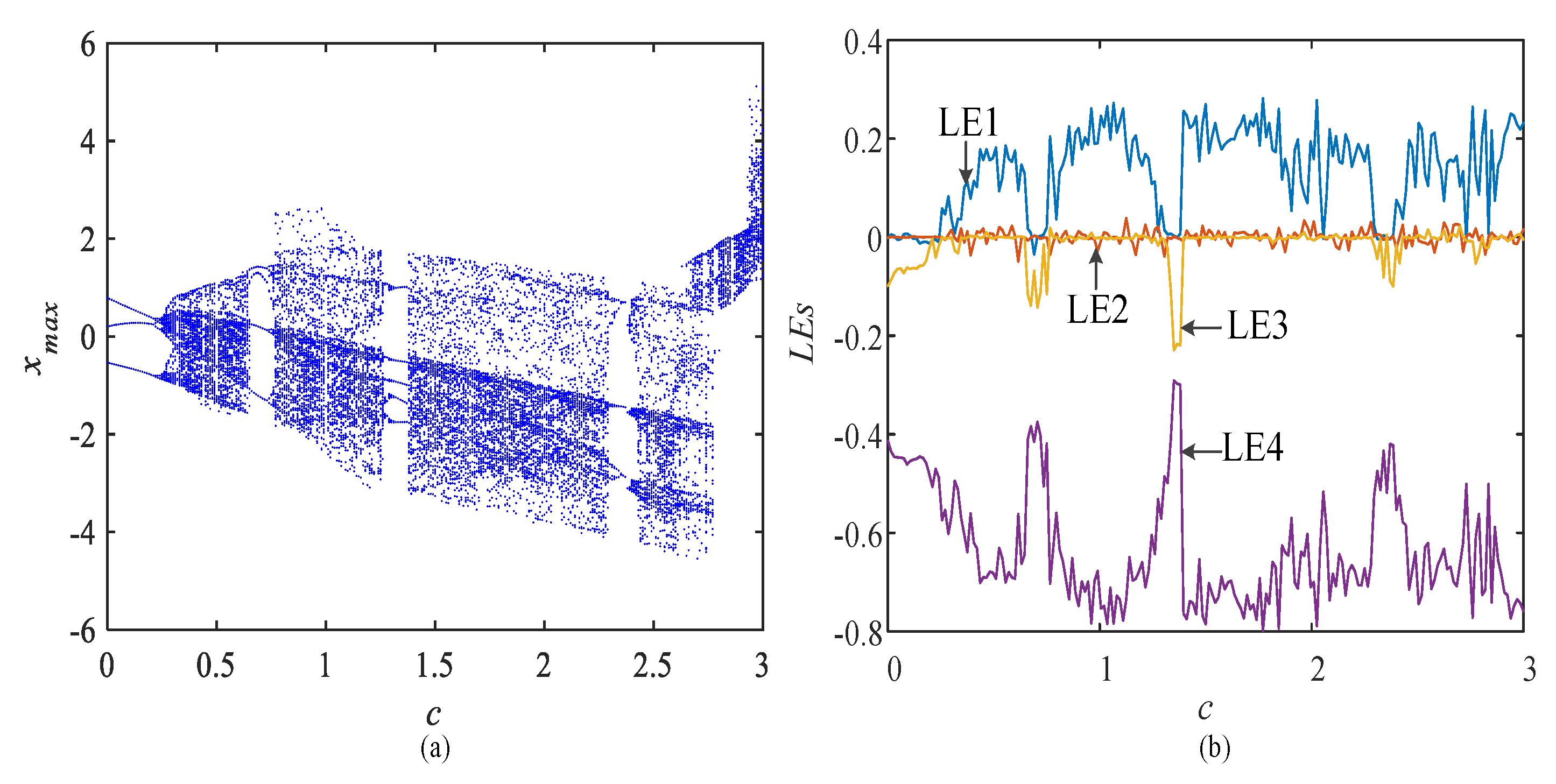
3.2. Dynamical Analysis with the Parameters
3.3. Dynamical Analysis with the Initial Values
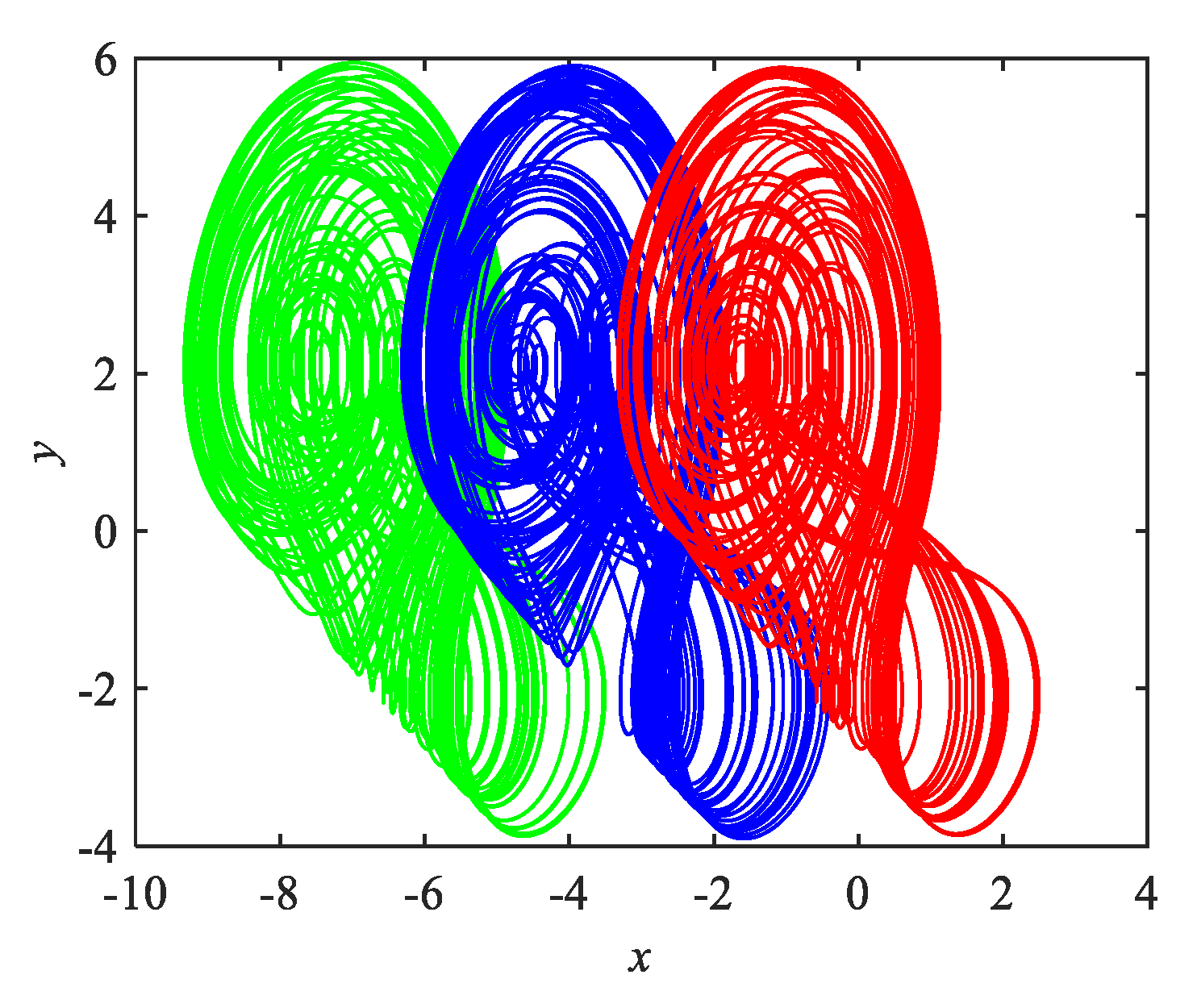
4. Multiple Coexisting Attractors of System
4.1. Multiple Coexisting Attractors and Its Digital Circuit Implementation
4.2. Offset Boosting
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Luo, J.; Xu, X.; Ding, Y.; Yuan, Y.; Yang, B.; Sun, K.; Yin, L. Application of a memristor-based oscillator to weak signal detecbtion. Eur. Phys. J. Plus 2018, 133, 239. [Google Scholar] [CrossRef]
- Hua, Z.; Zhou, Y.; Huang, H. Cosine-transform-based chaotic system for image encryption. Inf. Sci. 2019, 480, 403–419. [Google Scholar] [CrossRef]
- Ye, X.; Mou, J.; Luo, C.; Wang, Z. Dynamics analysis of Wienbridge hyperchaotic memristive circuit system. Nonlinear Dyn. 2018, 92, 923–933. [Google Scholar] [CrossRef]
- Wang, X.; Wang, S.; Zhang, Y.; Luo, C. A one-time pad color image cryptosystem based on SHA-3 and multiple chaotic systems. Opt. Lasers Eng. 2018, 103, 1–8. [Google Scholar] [CrossRef]
- Mou, J.; Sun, K.; Ruan, J.; He, S. A nonlinear circuit with two memcapacitors. Nonlinear Dyn. 2016, 86, 1–10. [Google Scholar] [CrossRef]
- Wang, G.; Zang, S.; Wang, X.; Yuan, F.; Iu, H.H.-C. Memcapacitor model and its application in chaotic oscillator with memristor. Chaos 2017, 27, 013110. [Google Scholar] [CrossRef]
- Bao, H.; Wang, N.; Wu, H.; Song, Z.; Bao, B. Bi-stability in an improved memristor-based third-order Wien-bridge oscillator. IETE Tech. Rev. 2019, 36, 109–116. [Google Scholar] [CrossRef]
- Chua, L. Memristor-the missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–509. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef]
- Yalagala, B.; Khandelwal, S.; Deepika, J.; Badhulika, S. Wirelessly destructible MgO-PVP-Graphene composite based flexible transient memristor for security applications. Mat. Sci. Semicon. Proc. 2019, 104, 104673. [Google Scholar] [CrossRef]
- Wang, W.; Jia, X.; Luo, X.; Kurths, J.; Yuan, M. Fixed-time synchronization control of memristive MAM neural networks with mixed delays and application in chaotic secure communication. Chaos Soliton Fract. 2019, 126, 85–96. [Google Scholar] [CrossRef]
- Zhang, W.; Cao, J.; Wu, R.; Chen, D.; Alsaadi, F.E. Novel results on projective synchronization of fractional-order neural networks with multiple time delays. Chaos Soliton Fract. 2018, 117, 76–83. [Google Scholar] [CrossRef]
- Lunelli, L.; Collini, C.; Jimenez-Garduño, A.; Roncador, A.; Giusti, G.; Verucchi, R.; Pasquardini, L.; Iannotta, S.; Macchi, P.; Lorenzelli, L.; et al. Prototyping a memristive-based device to analyze neuronal excitability. Biophys. Chem. 2019, 253, 106212. [Google Scholar] [CrossRef]
- Sun, J.; Yang, Q.; Wang, Y. Dynamical analysis of novel memristor chaotic system and DNA encryption application. IJST-T Electr. Eng. 2020, 44, 449–460. [Google Scholar] [CrossRef]
- Rajagopal, K.; Guessas, L.; Karthikeyan, A.; Srinivasan, A.; Adam, G. Fractional-order memristor no equilibrium chaotic system with its adaptive sliding mode synchronization and genetically optimized fractional order PID synchronization. Complexity 2017, 2017, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Feng, Y.; Bao, H.; Bao, B.; Wu, H.; Xu, Q. Hybrid state variable incremental integral for reconstructing extreme multistability in memristive jerk system with cubic nonlinearity. Complexity 2019, 2019, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Xu, B.; Wang, G.; Iu, H.H.-C.; Yu, S.; Yuan, F. A memristor-meminductor-based chaotic system with abundant dynamical behaviors. Nonlinear Dyn. 2019, 96, 765–788. [Google Scholar] [CrossRef]
- Sadecki, J.; Marszalek, W. Complex oscillations and two-parameter bifurcations of a memristive circuit with diode bridge rectifier. Microelectron. J. 2019, 93, 104636. [Google Scholar] [CrossRef]
- Rajagopal, K.; Li, C.; Nazarimehr, F.; Karthikeyan, A.; Duraisamy, P.; Jafari, S. Chaotic dynamics of modified wien bridge oscillator with fractional order memristor. Radioengineering 2019, 27, 165–174. [Google Scholar] [CrossRef]
- Ruan, J.; Sun, K.; Mou, J.; He, S.; Zhang, L. Fractional-order simplest memristor-based chaotic circuit with new derivative. Eur. Phys. J. Plus 2018, 133, 3. [Google Scholar] [CrossRef]
- Mou, J.; Sun, K.; Wang, H.; Ruan, J. Characteristic analysis of fractional-order 4D hyperchaotic memristive circuit. Math. Probl. Eng. 2017, 2017, 2313768. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Huang, D. Stability analysis and synchronization application for a 4D fractional-order system with infinite equilibria. Phys. Scripta 2020, 95, 015202. [Google Scholar] [CrossRef]
- Chen, C.; Chen, J.; Bao, H.; Chen, M.; Bao, B. Coexisting multi-stable patterns in memristor synapse-coupled Hopfield neural network with two neurons. Nonlinear Dyn. 2019, 95, 3385–3399. [Google Scholar] [CrossRef]
- Bao, H.; Wang, N.; Bao, B.; Chen, M.; Jin, P.; Wang, G. Initial condition-dependent dynamics and transient period in memristor-based hypogenetic jerk system with four line equilibria. Commun. Nonlinear Sci. 2018, 57, 264–275. [Google Scholar] [CrossRef]
- Wan, P.; Sun, D.; Zhao, M.; Wan, L.; Jin, S. Multistability and attraction basins of discrete-time neural networks with nonmonotonic piecewise linear activation functions. Neural Netw. 2020, 122, 231–238. [Google Scholar] [CrossRef]
- Chen, M.; Sun, M.; Bao, H.; Hu, Y.; Bao, B. Flux-charge analysis of two-memristor-based chua’s circuit: Dimensionality decreasing model for detecting extreme multistability. IEEE T Ind. Electron. 2020, 67, 2197–2206. [Google Scholar] [CrossRef]
- Li, C.; Sprott, J.C. Variable-boostable chaotic flows. Optik 2016, 127, 10389–10398. [Google Scholar] [CrossRef]
- Bayani, A.; Rajagopal, K.; Khalaf, A.J.M.; Jafari, S.; Leutcho, G.; Kengne, J. Dynamical analysis of a new multistable chaotic system with hidden attractor: Antimonotonicity, coexisting multiple attractors, and offset boosting. Phys. Lett. A 2019, 383, 1450–1456. [Google Scholar] [CrossRef]
- Li, C.; Lei, T.; Wang, X.; Chen, G. Dynamics editing based on offset boosting. Chaos 2020, 30, 063124. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Yang, Y.; Li, W.; He, S.; Li, C. Extremely rich dynamics in a memristor-based chaotic system. Eur. Phys. J. Plus 2020, 135, 579. [Google Scholar] [CrossRef]
- Zhang, S.; Zheng, J.; Wang, X.; Zeng, Z.; He, S. Initial offset boosting coexisting attractors in memristive multi-double-scroll hopfield neural network. Nonlinear Dyn. 2020, 102, 2821–2841. [Google Scholar] [CrossRef]
- Yu, F.; Liu, L.; Shen, H.; Zhang, Z.; Huang, Y.; Cai, S.; Deng, Z.; Wan, Q. Multistability analysis, coexisting multiple attractors, and FPGA implementation of Yu-Wang four-wing chaotic system. Math. Probl. Eng. 2020, 2020, 1–16. [Google Scholar] [CrossRef]
- Ding, D.; Shan, X.; Jun, L.; Hu, Y.; Yang, Z.; Ding, L. Initial boosting phenomenon of a fractional-order hyperchaotic system based on dual memristors. Mod. Phys. Lett. B 2020, 34, 2050191. [Google Scholar] [CrossRef]
- Tamba, V.K.; Kom, G.H.; Kingni, S.T.; Mboupda Pone, J.R.; Fotsin, H.B. Analysis and electronic circuit implementation of an integer- and fractional-order four-dimensional chaotic system with offset boosting and hidden attractors. Eur. Phys. J.Spec. Top. 2020, 229, 1211–1230. [Google Scholar] [CrossRef]
- He, S.; Sun, K.; Wang, H. Solution of the fractional-order chaotic system based on Adomian decomposition algorithm and its complexity analysis. Acta Phys. Sin. Ed. 2014, 63, 030502. [Google Scholar]
- Ye, X.; Wang, X.; Mou, J.; Yan, X.; Xian, Y. Characteristic analysis of the fractional-order hyperchaotic memristive circuit based on the Wien bridge oscillator. Eur. Phys. J. Plus 2018, 133, 516. [Google Scholar] [CrossRef]
- Yang, F.; Li, P. Characteristics analysis of the fractional-order chaotic memristive circuit based on Chua’s circuit. Mob. Netw. Appl. 2019, 5, 1–9. [Google Scholar] [CrossRef]
- Yang, F.; Mou, J.; Ma, C.; Cao, Y. Dynamic analysis of an improper fractional-order laser chaotic system and its image encryption application. Opt. Laser Eng. 2020, 129, 106031. [Google Scholar] [CrossRef]
- He, S.; Sun, K.; Wang, H. Complexity analysis and DSP implementation of the fractional-order Lorenz hyperchaotic system. Entropy 2015, 17, 8299–8311. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Sun, K.; Wang, H. Solution and dynamics analysis of a fractional-order hyperchaotic system. Math. Methods Appl. Sci. 2016, 39, 2965–2973. [Google Scholar] [CrossRef]
- Sun, K.H.; He, S.B.; He, Y.; Yin, L.Z. Complexity analysis of chaotic pseudo-random sequences based on spectral entropy algorithm. Acta. Phys. Sin. Ed. 2013, 62, 010501. [Google Scholar]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, C.; Sun, K.; He, S. Characteristic Analysis of Fractional-Order Memristor-Based Hypogenetic Jerk System and Its DSP Implementation. Electronics 2021, 10, 841. https://doi.org/10.3390/electronics10070841
Qin C, Sun K, He S. Characteristic Analysis of Fractional-Order Memristor-Based Hypogenetic Jerk System and Its DSP Implementation. Electronics. 2021; 10(7):841. https://doi.org/10.3390/electronics10070841
Chicago/Turabian StyleQin, Chuan, Kehui Sun, and Shaobo He. 2021. "Characteristic Analysis of Fractional-Order Memristor-Based Hypogenetic Jerk System and Its DSP Implementation" Electronics 10, no. 7: 841. https://doi.org/10.3390/electronics10070841