
A Survey on Deep Learning Based Methods and Datasets for Monocular 3D Object Detection



Abstract
:1. Introduction
2. Background on Object Detection
3. Datasets Used for Monocular 3D Object Detection
3.1. Beyond PASCAL
3.2. SUN RGB-D
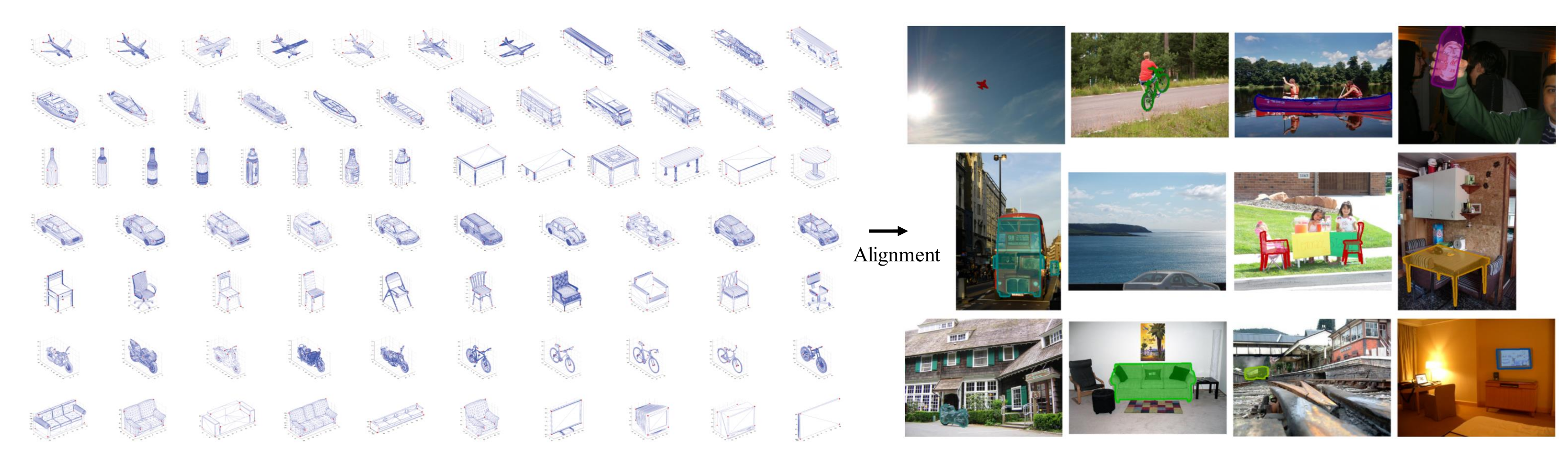
3.3. ObjectNet3D
3.4. Falling Things (FAT)
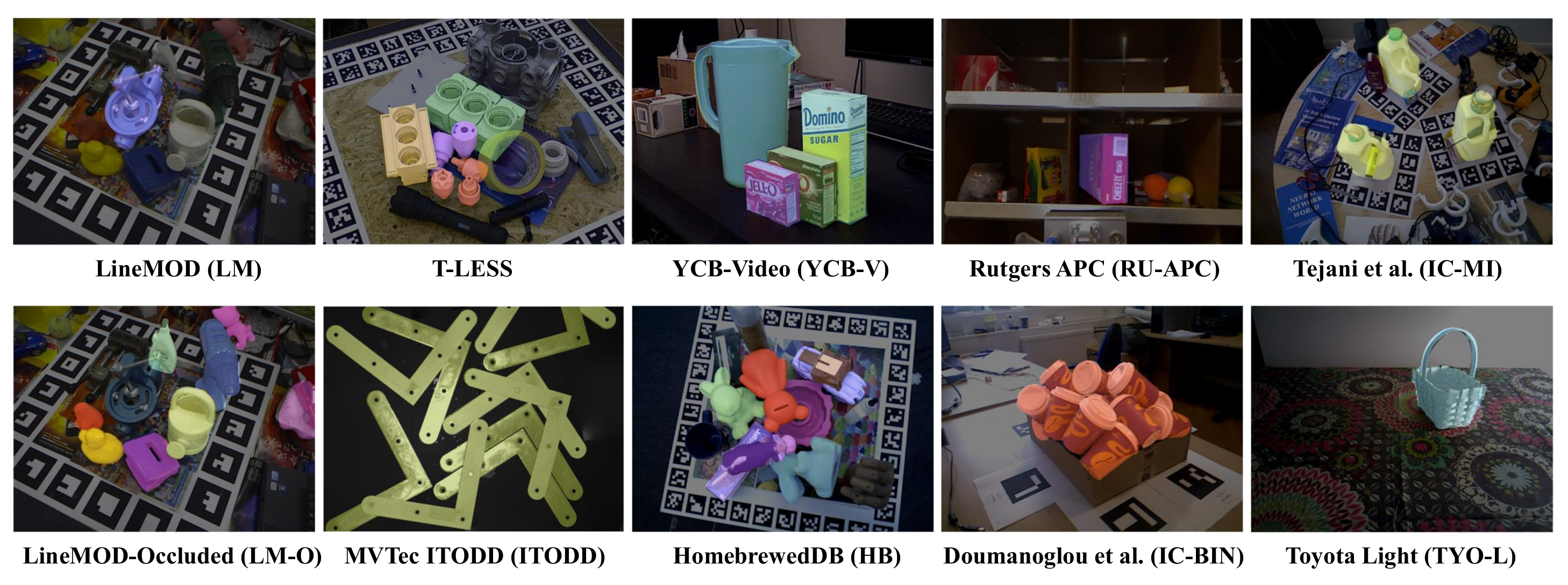
3.5. Benchmark for 6D Object Pose Estimation (BOP)
3.6. Context-Aware MixEd ReAlity (CAMERA)
3.7. Objectron
3.8. KITTI 3D
3.9. CityScape 3D
3.10. Synscapes
3.11. SYNTHetic Collection of Imagery and Annotations (SYNTHIA-AL)
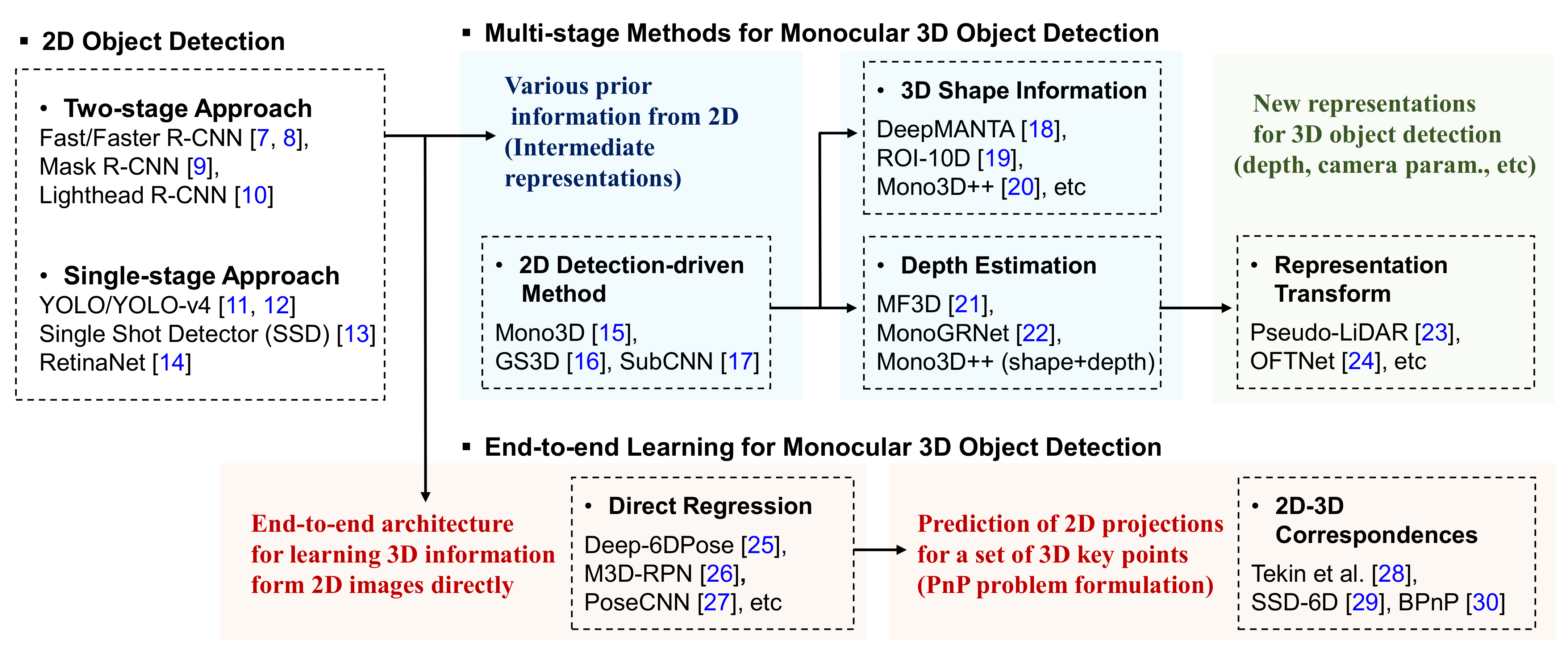
4. Monocular 3D Object Detection Methods
4.1. Multi-Stage Approaches
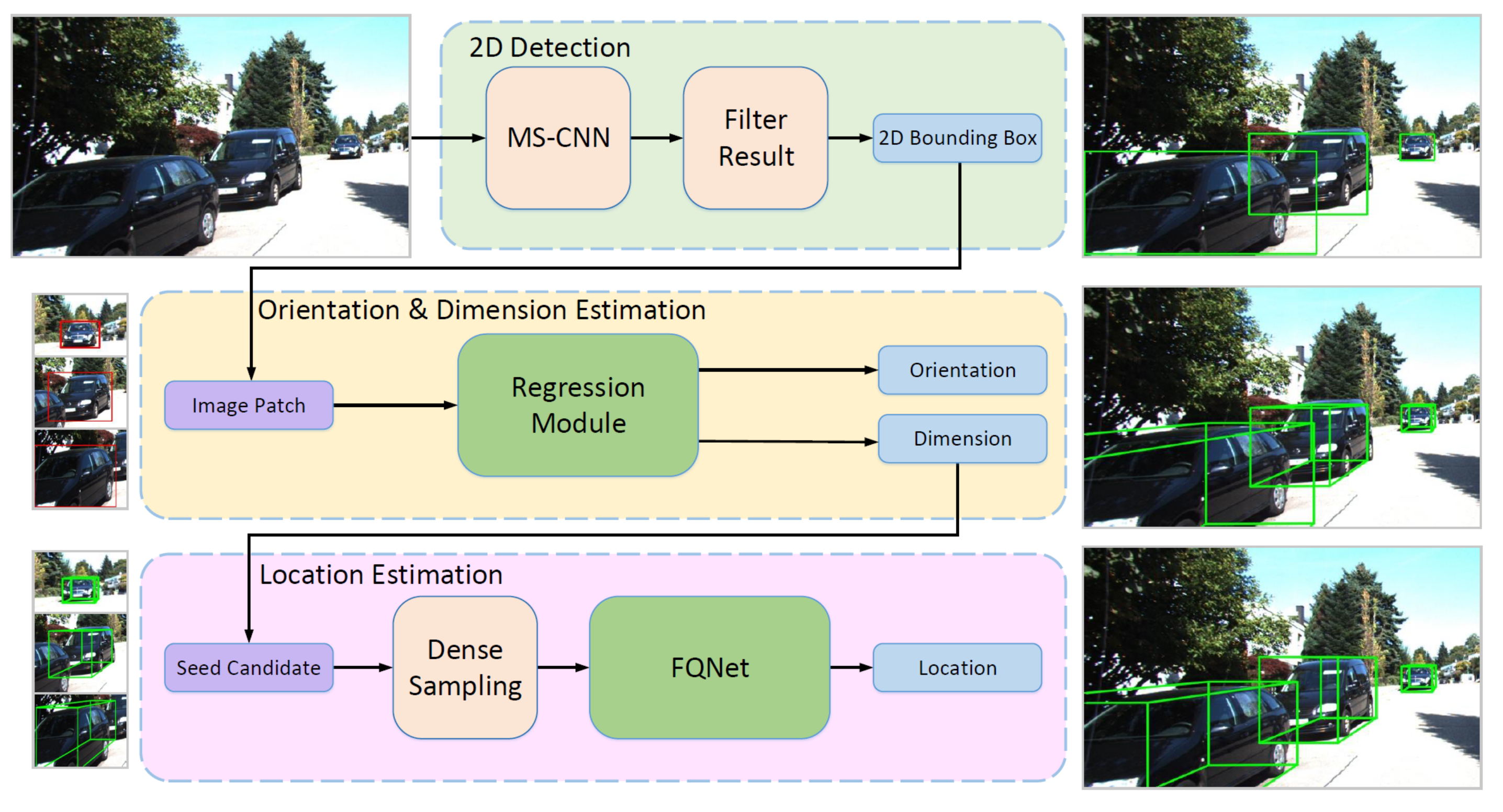
4.1.1. 2D Detection-Driven Methods
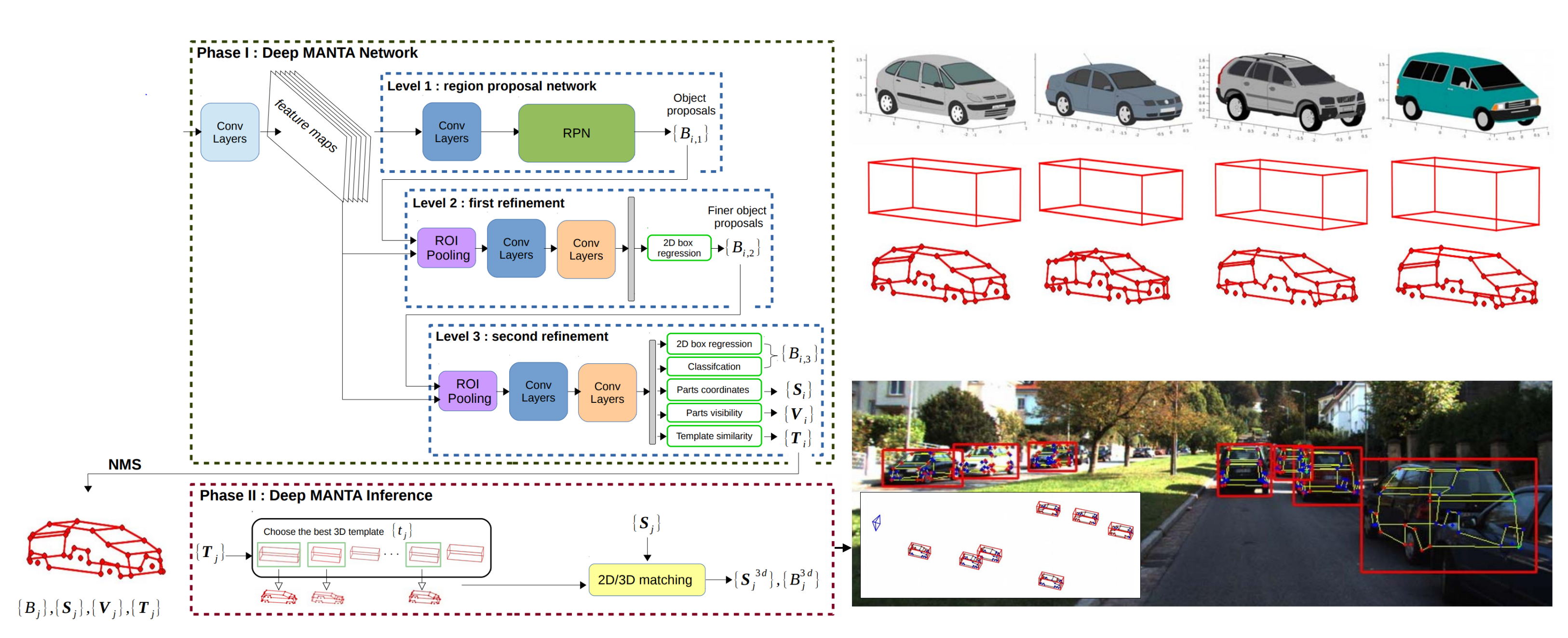
4.1.2. 3D Shape Information
4.1.3. Depth Estimation
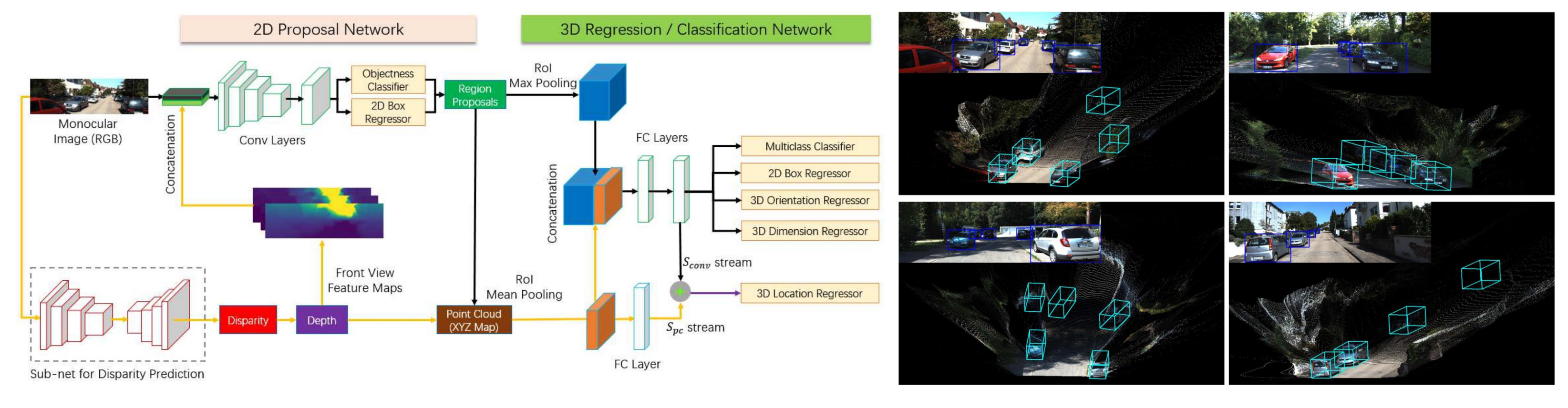
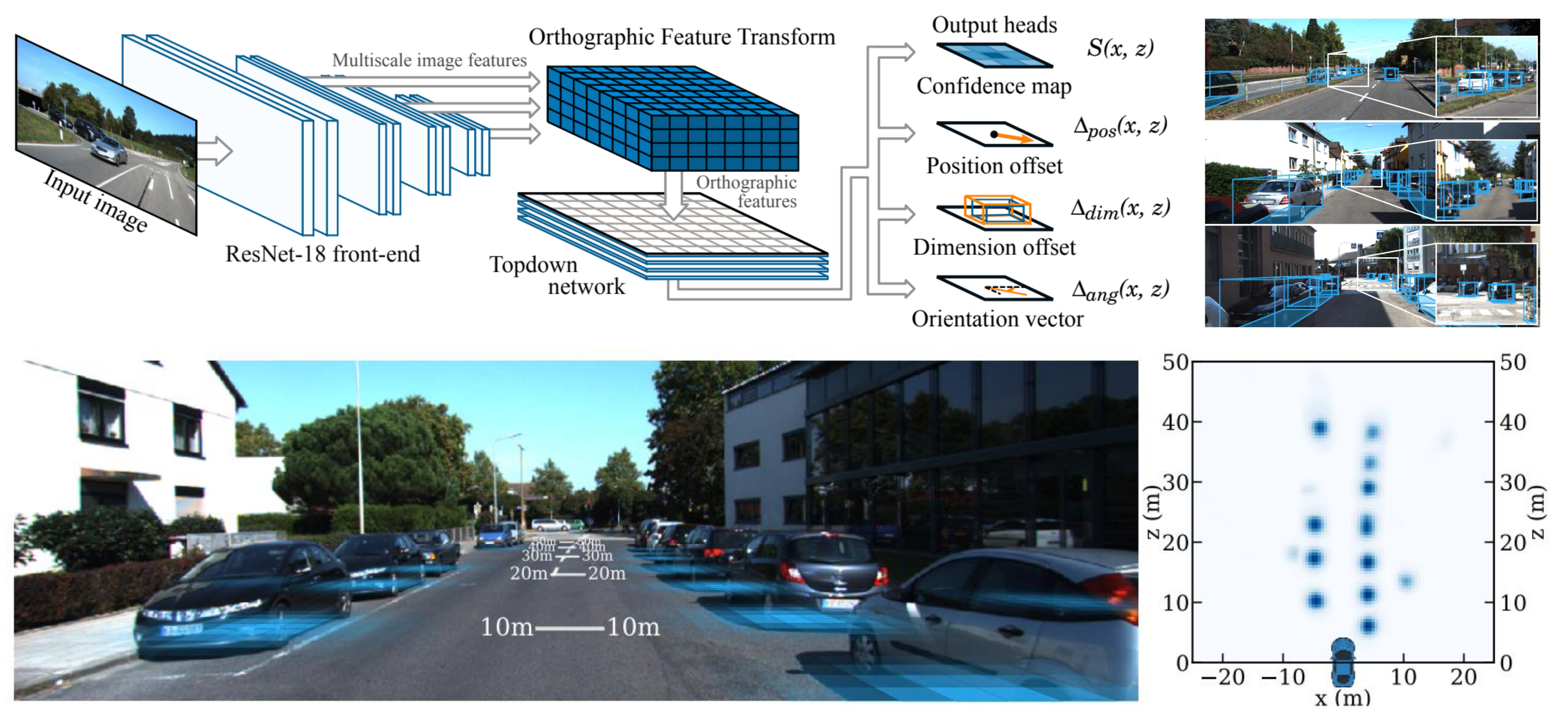
4.1.4. Representation Transform
4.2. End-to-End Approaches
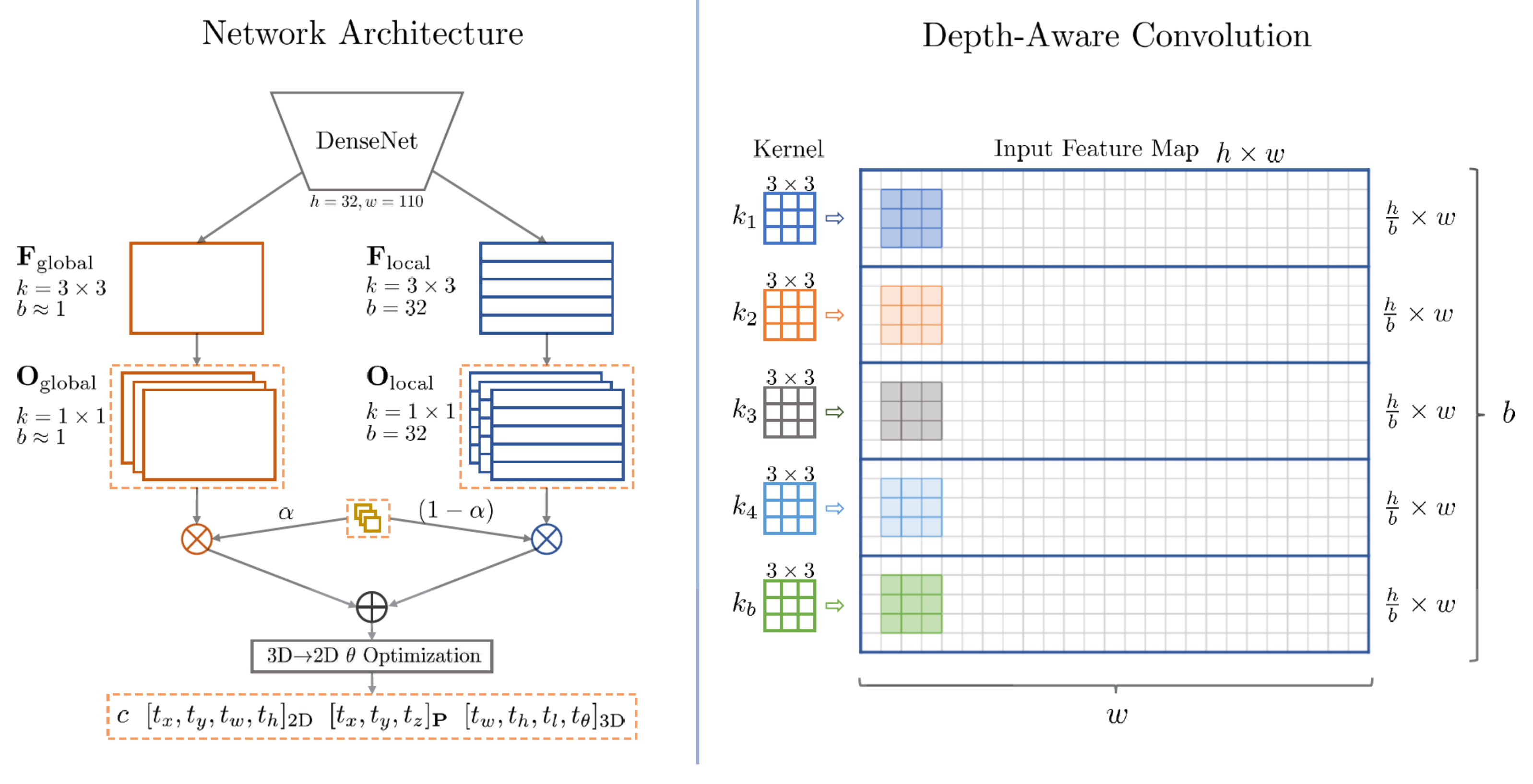
4.2.1. Direct Regression
4.2.2. 2D–3D Correspondences
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, W.; Luo, Y.; Wang, P.; Qin, Z.; Zhou, H.; Qiao, H. Recent Advances on Application of Deep Learning for Recovering Object Pose. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1273–1280. [Google Scholar]
- Sahin, C.; Kim, T.K. Recovering 6D Object Pose: A Review and Multi-modal Analysis. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018; pp. 1–17. [Google Scholar]
- Griffiths, D.; Boehm, J. A Review on Deep Learning Techniques for 3D Sensed Data Classification. Remote Sens. 2019, 11, 1499. [Google Scholar] [CrossRef] [Green Version]
- Arnold, E.; Al-Jarrah, O.Y.; Dianati, M.; Fallah, S.; Oxtoby, D.; Mouzakitis, A. A Survey on 3D object Detection Methods for Autonomous Driving Applications. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3782–3795. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Yin, D.; Chen, J.; Wu, Y.; Si, H.; Lin, K. A Survey on Monocular 3D Object Detection Algorithms Based on Deep Learning. J. Phys. Conf. Ser. 2020, 1518, 12–49. [Google Scholar] [CrossRef]
- Rahman, M.M.; Tan, Y.; Xue, J.; Lu, K. Recent Advances in 3D Object Detection in the Era of Deep Neural Networks: A Survey. IEEE Trans. Image Process. 2019, 29, 2947–2962. [Google Scholar] [CrossRef] [PubMed]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. (PAMI) 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Li, Z.; Peng, C.; Yu, G.; Zhang, X.; Deng, Y.; Sun, J. Light-head R-CNN: In Defense of Two-stage Object Detector. arXiv 2017, arXiv:1711.07264. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot Multibox Detector. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Chen, X.; Kundu, K.; Zhang, Z.; Ma, H.; Fidler, S.; Urtasun, R. Monocular 3D Object Detection for Autonomous Driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2147–2156. [Google Scholar]
- Li, B.; Ouyang, W.; Sheng, L.; Zeng, X.; Wang, X. GS3D: An Efficient 3D Object Detection Framework for Autonomous Driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 1019–1028. [Google Scholar]
- Xiang, Y.; Choi, W.; Lin, Y.; Savarese, S. Subcategory-aware Convolutional Neural Networks for Object Proposals and Detection. In Proceedings of the Winter Conference on Applications of Computer Vision (WACV), Santa Rosa, CA, USA, 24–31 March 2017; pp. 924–933. [Google Scholar]
- Chabot, F.; Chaouch, M.; Rabarisoa, J.; Teuliere, C.; Chateau, T. Deep MANTA: A Coarse-to-fine Many-task Network for Joint 2D and 3D Vehicle Analysis from Monocular Image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2040–2049. [Google Scholar]
- Manhardt, F.; Kehl, W.; Gaidon, A. ROI-10D: Monocular Lifting of 2D Detection to 6D Pose and Metric Shape. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 2069–2078. [Google Scholar]
- He, T.; Soatto, S. Mono3D++: Monocular 3D Vehicle Detection with Two-scale 3D Hypotheses and Task Priors. In Proceedings of the AAAI, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 8409–8416. [Google Scholar]
- Xu, B.; Chen, Z. Multi-level Fusion based 3D Object Detection from Monocular Images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 2345–2353. [Google Scholar]
- Qin, Z.; Wang, J.; Lu, Y. MonoGRNet: A Geometric Reasoning Network for Monocular 3D Object Localization. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 8851–8858. [Google Scholar]
- Wang, Y.; Chao, W.L.; Garg, D.; Hariharan, B.; Campbell, M.; Weinberger, K.Q. Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Oject Detection for Autonomous Driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 8445–8453. [Google Scholar]
- Roddick, T.; Kendall, A.; Cipolla, R. Orthographic Feature Transform for Monocular 3D Object Detection. In Proceedings of the British Machine Vision Conference (BMVC), Cardiff, UK, 9–12 September 2019; pp. 1–13. [Google Scholar]
- Do, T.T.; Cai, M.; Pham, T.; Reid, I. Deep-6DPose: Recovering 6D Object Pose from a Single RGB Image. arXiv 2018, arXiv:1802.10367. [Google Scholar]
- Brazil, G.; Liu, X. M3D-RPN: Monocular 3D Region Proposal Network for Object Detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 9287–9296. [Google Scholar]
- Xiang, Y.; Schmidt, T.; Narayanan, V.; Fox, D. PoseCNN: A Convolutional Neural Network for 6D Object Pose Estimation in Cluttered Scenes. In Proceedings of the Robotics: Science and Systems (RSS), Pittsburgh, PA, USA, 26–30 June 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Tekin, B.; Sinha, S.N.; Fua, P. Real-time Seamless Single Shot 6D Object Pose Prediction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 292–301. [Google Scholar]
- Kehl, W.; Manhardt, F.; Tombari, F.; Ilic, S.; Navab, N. SSD-6D: Making Rgb-based 3D Detection and 6D Pose Estimation Great Again. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 1521–1529. [Google Scholar]
- Chen, B.; Parra, A.; Cao, J.; Li, N.; Chin, T.J. End-to-end Learnable Geometric Vision by Back-propagating PnP Optimization. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 8100–8109. [Google Scholar]
- Xiang, Y.; Mottaghi, R.; Savarese, S. Beyond Pascal: A Benchmark for 3D Object Detection in the Wild. In Proceedings of the Winter Conference on Applications of Computer Vision (WACV), Steamboat Springs, CO, USA, 24–26 March 2014; pp. 75–82. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (voc) Challenge. IJCV 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Li, F.F. ImageNet: A Large-scale Hierarchical Image Database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Song, S.; Lichtenberg, S.P.; Xiao, J. SUN RGB-D: A RGB-D Scene Understanding Benchmark Suite. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 567–576. [Google Scholar]
- Silberman, N.; Hoiem, D.; Kohli, P.; Fergus, R. Indoor Segmentation and Support Inference from RGBD Images. In Proceedings of the European Conference on Computer Vision (ECCV), Florence, Italy, 7–13 October 2012; pp. 746–760. [Google Scholar]
- Janoch, A.; Karayev, S.; Jia, Y.; Barron, J.T.; Fritz, M.; Saenko, K.; Darrell, T. A Category-level 3D Object Dataset: Putting the Kinect to Work. In Consumer Depth Cameras for Computer Vision; Springer: Berlin/Heidelberg, Germany, 2013; pp. 141–165. [Google Scholar]
- Xiao, J.; Owens, A.; Torralba, A. Sun3D: A Database of Big Spaces Reconstructed using SfM and Object Labels. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Darling Harbour, Sydney, Australia, 1–8 December 2013; pp. 1625–1632. [Google Scholar]
- Xiang, Y.; Kim, W.; Chen, W.; Ji, J.; Choy, C.; Su, H.; Mottaghi, R.; Guibas, L.; Savarese, S. ObjectNet3D: A Large scale Database for 3D Object Recognition. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 160–176. [Google Scholar]
- Chang, A.X.; Funkhouser, T.; Guibas, L.; Hanrahan, P.; Huang, Q.; Li, Z.; Savarese, S.; Savva, M.; Song, S.; Su, H.; et al. ShapeNet: An Information-rich 3D Model Repository. arXiv 2015, arXiv:1512.03012. [Google Scholar]
- Tremblay, J.; To, T.; Birchfield, S. Falling Things: A Synthetic Dataset for 3D Object Detection and Pose Estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 2038–2041. [Google Scholar]
- Calli, B.; Walsman, A.; Singh, A.; Srinivasa, S.; Abbeel, P.; Dollar, A.M. Benchmarking in Manipulation Research: The YCB Object and Model Set and Benchmarking Protocols. arXiv 2015, arXiv:1502.03143. [Google Scholar]
- Hodan, T.; Michel, F.; Brachmann, E.; Kehl, W.; GlentBuch, A.; Kraft, D.; Drost, B.; Vidal, J.; Ihrke, S.; Zabulis, X.; et al. Bop: Benchmark for 6D Object Pose Estimation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 10–13 September 2018; pp. 19–34. [Google Scholar]
- Hodaň, T.; Sundermeyer, M.; Drost, B.; Labbé, Y.; Brachmann, E.; Michel, F.; Rother, C.; Matas, J. BOP Challenge 2020 on 6D Object Localization. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 577–594. [Google Scholar]
- Hinterstoisser, S.; Lepetit, V.; Ilic, S.; Holzer, S.; Bradski, G.; Konolige, K.; Navab, N. Model based Training, Detection and Pose Estimation of Texture-less 3D Objects in Heavily Cluttered Scenes. In Proceedings of the Asian Conference on Computer Vision (ACCV), Daejeon, Korea, 5–9 November 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 548–562. [Google Scholar]
- Brachmann, E.; Krull, A.; Michel, F.; Gumhold, S.; Shotton, J.; Rother, C. Learning 6D Object Pose Estimation using 3D Object Coordinates. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 536–551. [Google Scholar]
- Hodan, T.; Haluza, P.; Obdržálek, Š.; Matas, J.; Lourakis, M.; Zabulis, X. T-LESS: An RGB-D Dataset for 6D Pose Estimation of Texture-less Objects. In Proceedings of the Winter Conference on Applications of Computer Vision (WACV), Santa Rosa, CA, USA, 24–31 March 2017; pp. 880–888. [Google Scholar]
- Drost, B.; Ulrich, M.; Bergmann, P.; Hartinger, P.; Steger, C. Introducing MVTec ITODD—A Dataset for 3D Object Recognition in Industry. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017; pp. 2200–2208. [Google Scholar]
- Kaskman, R.; Zakharov, S.; Shugurov, I.; Ilic, S. HomebrewedDB: RGB-D Dataset for 6D Pose Estimation of 3D Objects. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Seoul, Korea, 27–28 October 2019; pp. 1–10. [Google Scholar]
- Rennie, C.; Shome, R.; Bekris, K.E.; De Souza, A.F. A Dataset for Improved RGBD-based Object Detection and Pose Estimation for Warehouse Pick-and-place. IEEE Robot. Autom. Lett. 2016, 1, 1179–1185. [Google Scholar] [CrossRef] [Green Version]
- Doumanoglou, A.; Kouskouridas, R.; Malassiotis, S.; Kim, T.K. Recovering 6D Object Pose and Predicting Next-best-view in the Crowd. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3583–3592. [Google Scholar]
- Tejani, A.; Tang, D.; Kouskouridas, R.; Kim, T.K. Latent-class Hough Forests for 3D Object Detection and Pose Estimation. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 462–477. [Google Scholar]
- Ahmadyan, A.; Zhang, L.; Wei, J.; Ablavatski, A.; Grundmann, M. Objectron: A Large Scale Dataset of Object-Centric Videos in the Wild with Pose Annotations. arXiv 2020, arXiv:2012.09988. [Google Scholar]
- Kuznetsova, A.; Rom, H.; Alldrin, N.; Uijlings, J.; Krasin, I.; Pont-Tuset, J.; Kamali, S.; Popov, S.; Malloci, M.; Kolesnikov, A.; et al. The Open Images Dataset V4. Int. J. Comput. Vis. 2020, 128, 1956–1981. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Sridhar, S.; Huang, J.; Valentin, J.; Song, S.; Guibas, L.J. Normalized Object Coordinate Space for Category-level 6D Object Pose and Size Estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 2642–2651. [Google Scholar]
- Geiger, A.; Lenz, P.; Urtasun, R. Are We Ready for Autonomous Driving? In The KITTI Vision Benchmark Suite. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar]
- Cabon, Y.; Murray, N.; Humenberger, M. Virtual KITTI 2. arXiv 2020, arXiv:2001.10773. [Google Scholar]
- Gählert, N.; Jourdan, N.; Cordts, M.; Franke, U.; Denzler, J. Cityscapes 3D: Dataset and Benchmark for 9 DoF Vehicle Detection. arXiv 2020, arXiv:2006.07864. [Google Scholar]
- Cordts, M.; Omran, M.; Ramos, S.; Rehfeld, T.; Enzweiler, M.; Benenson, R.; Franke, U.; Roth, S.; Schiele, B. The Cityscapes Dataset for Semantic Urban Scene Understanding. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 3213–3223. [Google Scholar]
- Wrenninge, M.; Unger, J. Synscapes: A Photo-realistic Synthetic Dataset for Street Scene Parsing. arXiv 2018, arXiv:1810.08705. [Google Scholar]
- Bengar, J.Z.; Gonzalez-Garcia, A.; Villalonga, G.; Raducanu, B.; Aghdam, H.H.; Mozerov, M.; Lopez, A.M.; van de Weijer, J. Temporal Coherence for Active Learning in Videos. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Korea, 27–28 October 2019; pp. 914–923. [Google Scholar]
- Ros, G.; Sellart, L.; Materzynska, J.; Vazquez, D.; Lopez, A.M. The SYNTHIA Dataset: A Large Collection of Synthetic Images for Semantic Segmentation of Urban Scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3234–3243. [Google Scholar]
- Su, H.; Qi, C.R.; Li, Y.; Guibas, L.J. Render for CNN: Viewpoint Estimation in Images using CNNs Trained with Rendered 3D Model Views. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 13–16 December 2015; pp. 2686–2694. [Google Scholar]
- Wohlhart, P.; Lepetit, V. Learning Descriptors for Object Recognition and 3D Pose Estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3109–3118. [Google Scholar]
- Agarwal, S.; Mierle, K.; Bjorck, A.; Brown, D.C.; Byrd, R.H.; Chen, Y.; Conn, A.R.; Dellaer, F.; Golub, G.H.; Gould, N.; et al. Ceres Solver. Available online: http://ceres-solver.org (accessed on 20 January 2021).
- Konishi, Y.; Hanzawa, Y.; Kawade, M.; Hashimoto, M. Fast 6D Pose Estimation from a Monocular Image using Hierarchical Pose Trees. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 398–413. [Google Scholar]
- Muñoz, E.; Konishi, Y.; Murino, V.; Del Bue, A. Fast 6D Pose Estimation for Texture-less Objects from a Single RGB Image. In Proceedings of the International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5623–5630. [Google Scholar]
- Tjaden, H.; Schwanecke, U.; Schomer, E. Real-time Monocular Pose Estimation of 3D Objects using Temporally Consistent Local Color Histograms. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 124–132. [Google Scholar]
- Mousavian, A.; Anguelov, D.; Flynn, J.; Kosecka, J. 3D Bounding Box Estimation using Deep Learning and Geometry. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 7074–7082. [Google Scholar]
- Fu, H.; Gong, M.; Wang, C.; Batmanghelich, K.; Tao, D. Deep Ordinal Regression Network for Monocular Depth Estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 2002–2011. [Google Scholar]
- Kim, Y.; Kum, D. Deep Learning based Vehicle Position and Orientation Estimation via Inverse Perspective Mapping Image. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 317–323. [Google Scholar]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. EPnP: An Accurate O(N) Solution to the PnP Problem. Int. J. Comput. Vis. 2009, 81, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Peng, S.; Liu, Y.; Huang, Q.; Zhou, X.; Bao, H. PVNet: Pixel-wise Voting Network for 6DOF Pose Estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 4561–4570. [Google Scholar]
- Poirson, P.; Ammirato, P.; Fu, C.Y.; Liu, W.; Kosecka, J.; Berg, A.C. Fast Single Shot Detection and Pose Estimation. In Proceedings of the Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 676–684. [Google Scholar]
- Liu, L.; Lu, J.; Xu, C.; Tian, Q.; Zhou, J. Deep Fitting Degree Scoring Network for Monocular 3D Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 1057–1066. [Google Scholar]
- Li, Y.; Wang, G.; Ji, X.; Xiang, Y.; Fox, D. DeepIM: Deep Iterative Matching for 6D Pose Estimation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 683–698. [Google Scholar]
- Rad, M.; Lepetit, V. BB8: A Scalable, Accurate, Robust to Partial Occlusion Method for Predicting the 3D Poses of Challenging Objects Without using Depth. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 3828–3836. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Hu, Y.; Hugonot, J.; Fua, P.; Salzmann, M. Segmentation-driven 6D Object Pose Estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 3385–3394. [Google Scholar]
- Zakharov, S.; Shugurov, I.; Ilic, S. DPOD: 6D Pose Object Detector and Refiner. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–3 November 2019; pp. 1941–1950. [Google Scholar]
- Hodan, T.; Barath, D.; Matas, J. EPOS: Estimating 6D Pose of Objects With Symmetries. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 11703–11712. [Google Scholar]
- Song, C.; Song, J.; Huang, Q. HybridPose: 6D Object Pose Estimation under Hybrid Representations. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 431–440. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Description | Data Type | Scene Type | Syn.? | # 3D Objects | # Images | Related References |
|---|---|---|---|---|---|---|---|
| PASCAL3D+ [31] | A Benchmark for 3D Object Detection in the Wild (WACV 2014) | RGB + 3D models | Indoor + Outdoor | Real | 3000 per cate. 12 categories | >20,000 | PASCAL VOC [32], ImageNet [33], Google Warehouse |
| SUN RGB-D [34] | A Scene Understanding Benchmark Suite (CVPR 2015) | RGB-D | Indoor | Real | 14.2 per image 800 categories | >10,335 in total | NYU depth v2 [35], BerkeleyB3DO [36] SUN3D [37] |
| ObjectNet 3D [38] | A Large Scale Database 3D Object Recognition (ECCV 2016) | RGB + 3D models | Indoor + Outdoor | Real + Syn. | 201,888 inst. 100 objects | 90,127 | ImageNet [33], ShapeNet [39], Trimble Warehouse |
| FAT [40] | A Synthetic Dataset for 3D Object Detection (CVPRW 2018) | RGB + 3D models | Household Objects | Syn. | 1–10 per image 21 objects | 61,500 | YCB [41] |
| BOP [42,43] | Benchmark for 6D Object Pose Estimation (ECCV 2018, ECCVW 2020) | RGB-D + 3D models | Indoor (various) | Real + Syn. | 302,791 inst. in 97,818 real images (test) 171 objects (w/texture) | >800 K train, test RGB-D (mostly synthetic) | LM [44], LM-O [45], T-LESS [46], ITODD [47], YCB-V [27], HB [48], RU-APC [49], IC-BIN [50], IC-MI [51], TUD-L [42], TYO-L [42] |
| Objectron [52] | Object-Centric Videos in the Wild with Pose Annotations | RGB | Indoor + Outdoor | Real | 17,095 inst. (multi-view) 9 categories | >4 M (14,819 videos) | Open Images [53] Similar to CAMERA [54] (Real/syn. data) |
| KITTI 3D [55] | KITTI Vision Benchmark Suite—3D Objects (CVPR 2012) | RGB (Stereo) + PointCloud | Driving Scenes | Real | 80,256 inst. 3 categories | 14,999 | Virtual KITTI 2 [56]* Photo-realistically simulated DB |
| CityScape 3D [57] | Dataset and Benchmark for 9 DoF Vehicle Detection (CVPRW 2020) | RGB (Stereo) | Driving Scenes | Real | 8 categories | 5000 | CityScape [58] |
| Synscapes [59] | A Photo Synthetic Dataset for Street Scenes | RGB | Driving Scenes | Syn. | 8 categories | 25,000 | Similar to CityScape [58] (Structure, content) |
| SYNTHIA-AL [60] | Synthetic Collection of Imagery and Annotation—3D Boxes (CVPR 2012) | RGB | Driving Scenes | Syn. | 3 categories | >143 K | ImageNet [33] SYNTHIA [61] |
| Method | Category | Key Feature | Related Datasets | Computational Time | Code? |
|---|---|---|---|---|---|
| Mono3D [15] | 2D-driven Method | An energy minimization approach that places object candidates on the 3D plane, and then scores each candidate box via several intuitive potentials encoding semantic segmentation, contextual information, size and location priors and typical object shape. | KITTI 3D | It takes 1.8 s in a single core, but exhaustive search in the proposal step can be done efficiently as all features can be computed with integral images. | Yes |
| DeepMAN TA [18] | 3D Shape Informat. | Simultaneous vehicle detection, part localization (even if some parts are hidden), visibility characterization, and 3D template for each detection. Coarse-to-fine object proposal with multiple refinement steps for accurate 2D vehicle bounding boxes. | KITTI 3D | It is approximately twice faster than Mono3D, due to the lower resolution of images in the coarse-to-fine method, considerably reducing a search space. | No |
| MF3D [21] | Depth Estimation | Multi-level fusion scheme for monocular 3D object detection utilizing a stand-alone depth estimation module to ensure the accurate 3D localization and improve the detection performance. | Cityscape, KITTI 3D | The inference time including the depth module achieves about 120 ms per img. on a NVIDIA GeForce GTX Titan X. | No Partial implement. |
| Pseudo- LiDAR [23] | Represent. Transform | Conversion of an estimated depth map from stereo or monocular imagery into a 3D point cloud, which mimics the real LiDAR, and takes advantage of existing LiDAR-based detection pipelines. | KITTI 3D | The paper does not focus on real-time processing. More effective way to speed up depth estimation is required. | Yes |
| Deep-6D Pose [25] | Direct Regression | An end-to-end deep learning framework for detection, segmentation, and 6D pose estimation of 3D objects. It directly regress 6D object poses without any post-refinements. | LineMOD (LM), [51] | Due to the end-to-end architecture, it offers an inference speed of 10 fps on a Titan X GPU (not optimized speed). | No Partial implement. |
| Tekin et al. [28] | 2D-3D Correspo. | A single-shot approach for simultaneously detecting an object in an RGB image and predicting its 6D pose without requiring multiple stages or having to examine multiple hypotheses. It predicts the projected vertices of the object’s 3D bounding box. | LM, LM-O | A pose refinement step can be used to boost the accuracy, but it runs at 10 fps. Without additional post-processing, it takes 50 fps on a single Titan X GPU. | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-h.; Hwang, Y. A Survey on Deep Learning Based Methods and Datasets for Monocular 3D Object Detection. Electronics 2021, 10, 517. https://doi.org/10.3390/electronics10040517
Kim S-h, Hwang Y. A Survey on Deep Learning Based Methods and Datasets for Monocular 3D Object Detection. Electronics. 2021; 10(4):517. https://doi.org/10.3390/electronics10040517
Chicago/Turabian StyleKim, Seong-heum, and Youngbae Hwang. 2021. "A Survey on Deep Learning Based Methods and Datasets for Monocular 3D Object Detection" Electronics 10, no. 4: 517. https://doi.org/10.3390/electronics10040517