1. Introduction
The technological progress in the field of transportation has called for the need of a safe and hassle free driving experience in the presence of diverse, challenging environments. Driverless cars have proved to be a remarkable step towards automation, marking a paradigm shift from the manual driving (MD) scenario. MD is often prone to human-centric errors occurring due to the carelessness and inattentiveness of the driver leading to a risk for the individual and traffic safety [
1]. Automated vehicles (AV) on the other hand, equipped with state-of-the-art sensors, are expected to reduce the driver burden along with ensuring driver comfort and vehicle safety [
2,
3,
4]. AV have shown promising progress in path planning [
5], path tracking [
6,
7,
8] and decision making fields [
9] that are crucial for autonomous driving.
Lateral and longitudinal control are the two major areas regulating the overall motion of AV. Lane-keeping and lateral stability are the two primary objectives for the lateral control whereas the velocity control is the primary aspect for the longitudinal control of the vehicle. For the lane-keeping purpose, the path following controllers designed using PID [
10], sliding mode [
8,
11] and Model Predictive Control (MPC) [
7,
12,
13] have been discussed in the literature. In order to address the path tracking objective involving complex maneuvers, the design of a PID controller employing various design approaches to adjust the controller parameters was discussed in [
14]. The lateral control of autonomous vehicles in the event of unknown road curvature using a nested PID steering control was proposed in [
10]. However, the above studies did not take into account the impact of aerodynamic forces on the vehicular lateral control. PID control, which is considered one of the simplest and easily constructed controllers for lane-keeping, suffers from the performance issues when there is a change in the external environment. A nonlinear model predictive control (NMPC) approach for the purpose of yaw motion control by utilizing the C/GMRES algorithm for distributed drive electric vehicles was proposed in [
15]. The key idea behind applying the C/GMRES algorithm was to address the computational cost of NMPC for distributed drive electric vehicles. The issue of path following control by considering the vehicle constraints such as yaw-rate, steering angle, lateral position error and side-slip angle was addressed in [
16]. However, the aforementioned papers [
15,
16] did not consider the effect of external disturbances such as crosswinds and yaw-moment on the lateral motion of the vehicle. The simultaneous control of lateral and longitudinal motion of the vehicle by employing a neural network based adaptive controller was suggested in [
17]. The purpose of designing the proposed controller was to achieve the path following and speed tracking control requirements. However, this paper did not consider the adverse environmental conditions such as vehicles moving on low friction surfaces in the presence of crosswinds. An LMI based TS Fuzzy static output feedback control scheme for the path following of autonomous vehicles was proposed in [
18]. The vehicle was subjected to the road curvature disturbances and time-varying vehicle speed scenarios. However, the combined road vehicle control model neglected the impact of aerodynamic forces on the lateral motion of the vehicle under adverse road conditions. A comparative study evaluating the performance of an unmanned surface vehicle (USV) in terms of station keeping heading and position using a nonlinear proportional derivative, sliding mode, and backstepping feedback controllers in the presence of wind disturbances was proposed in [
19]. However, the type of autonomous vehicles taken into consideration in this paper was marine vehicles.
Sliding mode control (SMC) has an inherent ability to compensate for matched uncertainties and unknown disturbances. However, the conventional first order SMC exhibit high frequency chattering in its control action, which is quite undesirable. To address the issue of chattering in the SMC, several approaches based on non-singular terminal SMC (NT-SMC) [
20] and higher order sliding mode (HOSM) [
21] have been proposed. NT-SMC and HOSM approaches can effectively suppress the chattering phenomenon and simultaneously compensate for the effect of disturbances in finite time. However, the control based approaches discussed in the literature are effective in implementation as long as the perfect knowledge of the system is in place. On the contrary, in the realistic scenario, the information regarding the model dynamics is limited. The model uncertainties and the disturbances are time-varying and they are dependent on the change in the navigational environment. In those cases, it becomes difficult to measure those entities and thus the design of model based control approaches fail to achieve the objective.
To address the shortcomings in the model based control approaches discussed above, model free based control approaches have been proposed for ensuring lane-keeping (LK) and lateral stability (LS) of the vehicle [
22,
23,
24]. The authors in [
22] proposed an adaptive neural network (ANN) approximator to estimate the uncertainty in the tire cornering coefficient and laid down the design of a backstepping variable structure control (BSVC) to compensate the lateral deviation and oscillations in the yaw-rate of the vehicle. This paper takes into consideration the vehicle maneuvering in the low-friction surfaces where the proposed neural network based controller was able to compensate for the undesirable yaw-moment generating oscillations in the yaw-rate. However, the authors in [
22] do not take into consideration the effect of crosswinds and yaw-moment as external disturbances affecting the lateral motion of the vehicle. In [
23], the authors proposed a hybrid combination of a fuzzy neural network and SMC to develop a lateral control strategy to track a desired trajectory. However, the issue associated with the fuzzy control approach is the choice of rules in designing the control law. In the fuzzy control approach, the choice of rules highly impact the control performance of the system. Incorrect choice of rules does not provide an optimal control performance leading to either sub-optimal or deteriorated performance. Again the choice of rules highly depends on an accurate or near to accurate knowledge of the system, which is not available every time. In addition, the choice of membership function is also arbitrary and therefore to get an efficient control performance in the fuzzy control approach is a challenging aspect.
Motivated by the idea of robust lateral control of the vehicle presented in [
22], this paper takes into consideration the effect of crosswinds and yaw-moment as external disturbances affecting the lateral motion of the vehicle. The type of autonomous vehicles taken into consideration in this paper are the car-like vehicles with an Ackermann geometry model. The vehicle traversing with Ackermann steering states that the outer wheel steers for a smaller angle than the inner wheel. The front left wheel serves as the outer wheel whereas the front right wheel acts as the inner wheel. In the current study, which is based on the path tracking objective, the vehicle model taken into consideration is the vehicle dynamics based dynamic bicycle model equipped for higher vehicle speeds. The reason behind not considering the kinematic bicycle model is because at higher speeds the velocity at each wheel is not in the direction of the wheel. The main contributions related to this research work are as follows:
The tire cornering stiffness exhibits strong uncertainty under challenging driving conditions in the presence of unknown external disturbances. To deal with such types of conditions, this paper proposes a HOSMC based radial basis function neural network (RBFNN) to maintain lateral control and yaw stability of the vehicle.
An overall closed-loop stability of the HOSMC based RBFNN for the bicycle model of the vehicle is established. The weights of the neural network are adjusted online with the formulation of an adaptation law using the Lyapunov method thereby ensuring convergence of the sliding surface error.
Simulations are performed in the CarSim-Matlab Simulink environment to justify the performance of the proposed neural network based controller.
This paper is organized as follows.
Section 2 presents a brief description regarding the governing dynamics affecting the lateral dynamics of the vehicle.
Section 3 provides an overview of the robust HOSM controller design whereas
Section 4 lays down the detailed procedure regarding the proposed RBFNN based HOSMC design for compensating the effect of uncertainties and disturbances affecting the lateral motion of the vehicle. This section also discusses the overall closed loop stability exhibited by the proposed controller.
Section 5 discusses the simulation results showing the robust performance of the vehicle with respect to the LK and LS as performance indices.
Section 6 provides a brief discussion on the simulation results, whereas
Section 7 concludes the paper.
2. Vehicle Dynamic Model
The lateral vehicle dynamics model is expressed as [
25,
26].
where
represent the mass of the vehicle, longitudinal velocity, yaw inertia, side-slip angle, yaw-rate, front and rear friction forces acting on the vehicle.
represent the distance of the front wheel and rear wheel from the center of gravity.
and
represent the lateral forces applied on the vehicle due to the effect of crosswinds and the yaw-moment, respectively. The crosswinds and the yaw-moment represent the unknown external disturbances. As far as crosswinds are concerned, a strong gust of wind generates sufficient force and torque that can roll over or drive the vehicle out of the lane. More specifically, the effect of crosswinds on the lateral offset and stability of the vehicle is pronounced when the vehicle is moving at a higher longitudinal speed on low-friction surfaces. The resulting aerodynamic forces and the moment that act on the vehicles rigid body are represented in longitudinal, lateral and vertical directions. Since this study is focused on the lateral control of the AV, the aerodynamic forces on the lateral direction is represented as
and
where
,
A,
L and
represent the air density, vehicle area, vehicle length and relative wind speed, respectively.
and
represent the non-dimensional coefficients corresponding to the force and moment, respectively. Generally, the crosswinds impact the vehicle at various incident angles and for this study, we have assumed the wind’s impact at an incident angle of 75 degrees. For the vehicle to satisfy the lane-keeping task, the objective is to keep the vehicle near to the center lane with minimum lateral offset and orientation error. In addition to the lane-keeping task, the other objective is to ensure stability of the vehicle by minimizing the oscillations in the yaw-rate during high lateral accelerations or low frictional surfaces. In order to satisfy the above objectives, the lane dynamics with road curvature
should include the lateral offset
and heading error
term at look ahead distance
. Thus the dynamics of the lane tracking error is expressed as [
25]
Considering the linear relationship between the tire lateral forces and the slip angle, the expression for the front and the rear axle lateral forces can be represented as
where
represent the tire cornering coefficients.
, and
represent the front and rear tire slip angles, which is expressed as
where
represent the front wheel road steer angle.
Figure 1 shows the combined vehicle dynamics with the lane tracking errors considered in this study.
3. Robust HOSMC Design
Figure 2 shows the overall architecture of the proposed neural network based controller for the lateral control of the vehicle.
In
Figure 2 the sliding surface
is a function of lateral error
e, which acts as the input to the proposed RBFNN based HOSM controller. On the account of unknown external disturbances affecting the system, the proposed RBFNN is used to estimate the equivalent control input
. The robust term
v computed from the HOSM configuration along with the estimated equivalent control input generates the optimal road steer angle
, which acts as the control input for the vehicle model. The desired lateral offset
, which is taken as the reference should be zero at look ahead distance
. Thus the sliding surface
is designed as
In the case of adverse conditions such as at the low friction surface or high lateral acceleration, the tire cornering characteristics exhibit high uncertainty. The tire cornering coefficients can then be expressed as
and
where,
and
represent the nominal values of tire cornering coefficients.
and
represent the uncertainty in the tire cornering characteristics. Thus from Equations (
1)–(
4), the derivative of the sliding surface is expressed as
where
,
,
and
From (
7), it is observed that the term
f contains the tire-force uncertainty
and
d represents the effect of crosswinds and yaw-moment on the lateral motion of the vehicle.
represents the design parameter satisfying
. For the existence of second order sliding control,
should be satisfied. Thus, for the convergence of the sliding error in the presence of disturbances, the front wheel steering angle is then expressed as
where
and
represent the equivalent road steer angle and the robust control term, respectively.
v represents the robust term, which is expressed as [
27]
Here,
represent the positive robust term gains to be designed accordingly. For this study, the gains associated with the HOSM controller are
,
, and
, respectively. The higher the longitudinal speed, the higher the tire cornering force. The value of tire-force uncertainty
, which is difficult to estimate, also changes with the change in the longitudinal speed and the road surface conditions. Thus, the term
f in (
8) that regulates the equivalent road steer angle
is also difficult to estimate as it consists of the tire-force uncertainty term. The dynamics of crosswinds and the yaw-moment also depend on the longitudinal speed of the vehicle. The higher the speed, the greater the lateral force and yaw-moment impacted on the vehicle. To address the above challenges and its impact on the lateral control of the vehicle, an adaptive HOSMC based on RBFNN is proposed for effective lane-keeping and stability of the vehicle.
4. RBFNN Based HOSMC Design
The structure of RBFNN with one input and one output with a hidden layer consisting of five nodes is shown in
Figure 3. The design procedure of the proposed controller includes the estimation of
using RBFNN. The input to this RBFNN structure is the sliding surface
and the hidden layer consists of five nodes with a gaussian kernel, each one having a predefined center
c and bias width
b. The dynamics of RBFNN are expressed by
where
i ranges from 1 to 5. The center and the bias considered for this study is
The ideal output
using the RBFNN dynamics from (
10) is represented by
where
represents a very small approximation error satisfying
and
represents the weight vector. However, the approximated value of
using RBFNN is then represented by
where
is the estimated value of
to be obtained. The approximate error in the equivalent road steer angle is then represented by
Now taking into consideration that
where
and
represent the estimated equivalent value of the steering angle and the robust term, respectively. Referring to (
7), (
8) and (
12) we get
Closed-Loop Stability Analysis
In order to check for the stability of the proposed RBFNN based HOSMC, the Lyapunov candidate function selected is represented as
where
represents the adaptive learning rate satisfying
. The choice of
greatly impacts the overall closed-loop performance in such a way that too small or too high a value of this parameter leads the system to the point of instability. Therefore the value of
chosen for this study is 0.00005. The derivative of the
is represented as
as
represents the ideal optimal weight and so its derivative
will be zero. However,
will get updated over the simulation interval till it reaches its optimal value. The derivative of the Lyapunov function
V is then expressed as
By ensuring
, Equation (
15) becomes
From (
16), it can be observed that if
, with
where
D represents the peak value of the disturbance, then the derivative of the Lyapunov function
for
. As the control input
from (
8) is upper bounded such that
, so the RBF weight
is ultimately bounded and the convergence of the
to the optimal value is achieved.
5. Simulation Results
In this section, the performance of the vehicle in terms of lane-keeping errors (lane offset and heading error), and stability (yaw-rate and lateral acceleration) of the proposed scheme is evaluated and compared with the pure-pursuit MPC controller in the CarSim-Matlab Simulink environment. The Carsim vehicle simulator uses an in-built MPC for lateral control of the Automotive Vehicle. The objective of the controller is to ensure that the vehicle tracks a reference trajectory with minimum lateral error. The cost function associated with this MPC to be minimized is expressed as
where
represents the vehicle state,
u represents the control input, which in our case is the road steer angle,
w represents the disturbance affecting the system, and
z represents the output of the system. The matrices
and
N have constant coefficients. The control objective is to ensure that the control input
u drives the vehicle in such a way that the output
z tracks the given reference trajectory over a preview time
T. The control input
u is considered optimal when it minimizes the cost function
J. The vehicle used in CarSim belongs to E-class Sedan and the tire model used in the study is the 225/60 R18 Internal tire model. The estimation of the equivalent control
to compensate for the uncertainty and the effect of disturbances by the proposed controller is validated through simulation. The performance of the vehicle employing the proposed scheme is investigated with and without the effect of disturbances. Further, to validate the robustness of the proposed scheme, the vehicle is made to traverse on a variety of road conditions at various longitudinal velocities. The coefficient of friction
for those road surfaces is varied from 0.4 to 1. The effectiveness of the proposed scheme is evaluated using a performance metric employing statistical measures such as Root Mean Square Error (RMSE) for lane-keeping errors and coefficient of variation (COV) for stability of the vehicle. The vehicle specifications considered for this study are shown in
Table 1.
5.1. Nominal Case: Vehicle Performance without the Impact of Disturbances
In this case, the performance of the vehicle in terms of lane-keeping errors and stability is studied when it is not impacted with any crosswinds. Here, the road friction coefficient (
) is taken to be equal to 1. It is observed from
Figure 4,
Figure 5 and
Figure 6 that the proposed RBFNN-HOSM controller yields less lateral offset and renders better stability to the vehicle because of comparatively lesser peak magnitude of yaw-rate and lateral acceleration than compared to the pure pursuit in-built MPC controller in CarSim (CSM). The road steer angle of the proposed scheme, as shown in
Figure 7, shows smooth response for the vehicle speeds
= 60 km/h and
= 100 km/h. It is evident from the figures that the vehicle moving at lower longitudinal velocity
renders more stability to the vehicle than compared to when the
is more.
5.2. Robustness to External Disturbances and a Variety of Road Conditions: – and , km/h
In this first case, the vehicle is allowed to navigate on a road-surface where the friction
varies between 0.4 to 0.85. In the second case, the vehicle is made to move on a road-surface where the road friction
. In the third case, the performance of the vehicle when the road friction
varies between 0.4 to 0.85 is simulated using the in-built MPC controller in CarSim. For all the cases, the vehicle moving at a high longitudinal speed
= 100 km/h is impacted with crosswinds as a disturbance between the longitudinal distance of 100 to 250 m. The performance of the RBFNN-HOSM controller in terms of lane-keeping and vehicle stability is examined under these adverse scenarios for the first two cases and is then compared with the in-built MPC controller in CarSim.
Figure 8a,b shows the global reference path and the aerodynamics forces and the yaw-moment being impacted on the vehicle on its course. The global reference path resembles that of a double lane change trajectory. From
Figure 8c,d, it is observed that the lateral offset and the heading error gets distorted when the vehicle is impacted with crosswinds at a longitudinal distance between 100 to 200 m when
–
for our proposed RBFNN-HOSM controller. However, after a distance of 200m, the effect of disturbances is compensated by the proposed RBFNN-HOSM controller. On the contrary, when
there is a slight deviation in the lateral offset and heading error at a longitudinal distance of 150 m but after the compensation provided by the proposed controller, the performance improves. The peak value of the lateral offset and the heading error is 0.1 m and 2 degrees, respectively, clearly signifying that the vehicle does not get deviated much even during the onset of adverse conditions. At a longitudinal distance of 250 m when there is a lane change in the global reference path, there is a little shift in the lateral offset and the heading error, which is again compensated thereafter. It is observed that the lateral offset and heading error in the case of the proposed RBFNN-HOSM controller is less than the in-built MPC controller in Carsim. The lateral acceleration and yaw-rate are more in the case of the in-built MPC controller in Carsim than compared to the proposed RBFNN-HOSM controller. Thus, from
Figure 8, it is observed that the performance of the proposed controller is better than the in-built MPC controller in Carsim.
The peak value of the Lateral acceleration, as shown in
Figure 8e, is 3.58 m/s
, which states the fact that the vehicle operates in the region of the tire-road saturation limit. The deterioration in the lateral acceleration, during the case when
–
, occurs due to the impact on the lateral force component at low friction conditions, as shown in
Figure 9.
When
–
, the yaw-rate shown in
Figure 8f shows the sign of distortion during the time when the disturbance begins and reaches a peak value of 10 degrees/s in the case of our proposed RBFNN-HOSM controller. However, due to the compensation provided by the proposed controller, the distortion in the yaw-rate gets stabilized at a longitudinal distance of 200 m signifying the regaining of vehicle stability. The effect of disturbances and the road-surface friction is witnessed in the road steer angle when
–
, as shown in
Figure 8g, where there is a sharp increase in the steer angle during the time when the disturbance begins. On the contrary, when
, there is a slight dip in the steering angle at the longitudinal distance of 150 m during the onset of crosswinds. However, the deviation in the steering angle when
gets compensated due to the control action provided by the proposed controller. The peak value of the steer angle rises to -6 degrees, but after the compensation provided by the proposed controller, the road steer angle exhibits smoothness and uniformity afterward. The effect on sliding surface due to the crosswinds and the different road conditions is shown in
Figure 10. The effect of low-friction is clearly evident on the sliding surface characteristics with a sharp spike at a longitudinal distance of 150 m when
–
.
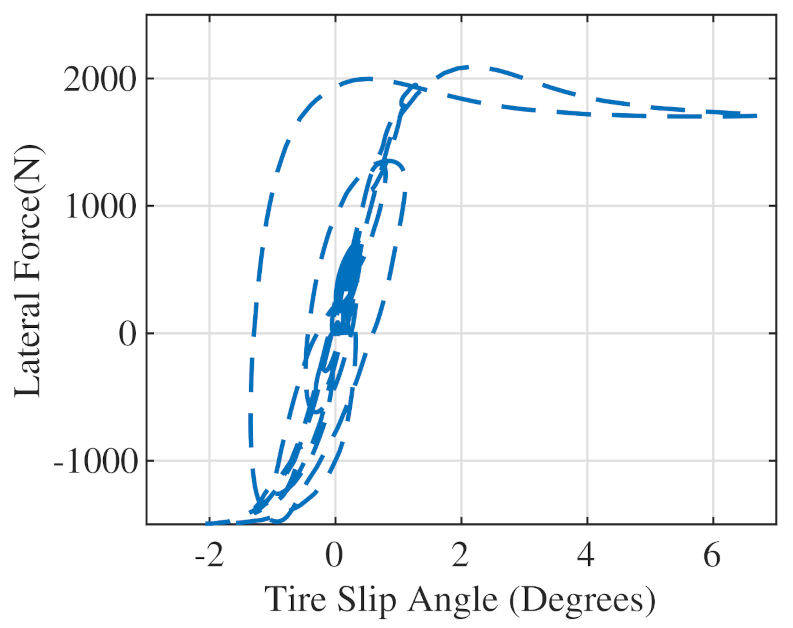
To further validate that the road-tire characteristics of the vehicle operate close to the region of saturation, the performance of lateral force on the vehicle is examined with respect to the tire-slip angle. In this study, the behavior of lateral force on the left front tire is examined with respect to the tire-slip angle. From
Figure 11, it is observed that the road-tire characteristics exhibit the nonlinear behavior when the vehicle longitudinal speed is 100 km/h. In this case, the lateral force is saturated with the increase in the slip angle. However, at a lower longitudinal speed of 60 km/h, the tire road characteristics exhibit linear behavior, as shown in
Figure 12.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}