
Bridge Dynamic Cable-Tension Estimation with Interferometric Radar and APES-Based Time-Frequency Analysis


Abstract
:1. Introduction
- Systematically describe the principle of a remote dynamic cable-tension measuring method.
- An APES-based bridge dynamic cable-tension estimation method is proposed. When compared with other cable-tension estimation methods, it can achieve more accurate fundamental frequency, especially when there are nearby frequency interferences. It can also provide improved spectra resolution constrained by the duration of the measured displacement.
- The cable time-frequency distribution is analyzed with data recorded when a high-speed train passed a cable-stayed bridge. The result can reveal the operational condition of the bridge, such as cable-tension distribution, dynamic cable-tension variation, the fundamental frequency of the bridge deck, etc. These properties can provide unprecedented details of the dynamic cable-tension change process.
2. Interferometric Radar-Based Cable-Tension Measurement
2.1. Principles of the Interferometric Radar
2.1.1. Remote Displacement Measurement
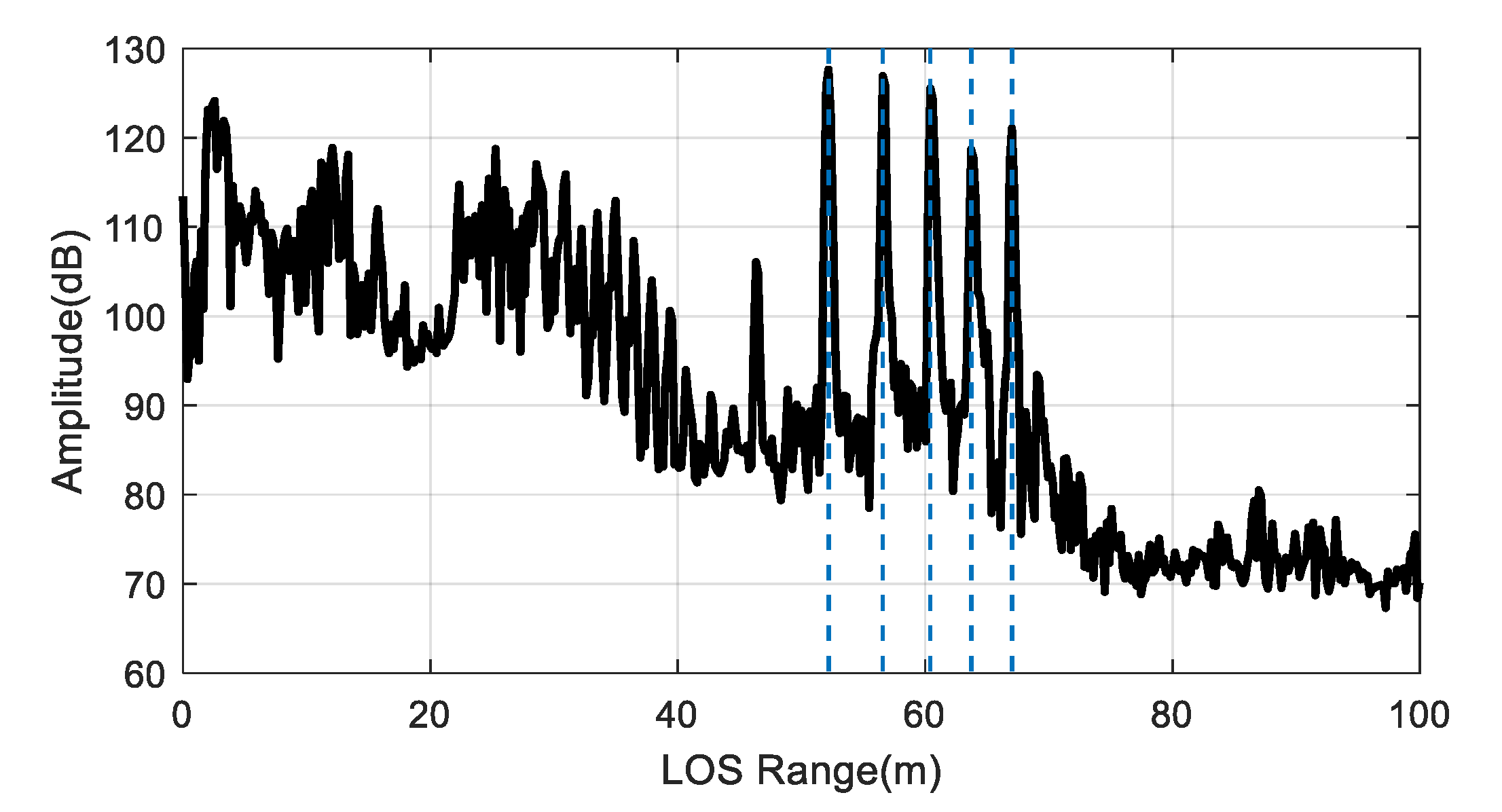
2.1.2. Radar Characteristic of a Bridge Cable
2.2. Principles of Vibration Frequency-Based Cable-Tension Measurement
3. APES-Based Time-Frequency Analysis of Bridge Cables
3.1. Cable Displacement Model
3.2. Principles of APES-Based Spectrum Estimation
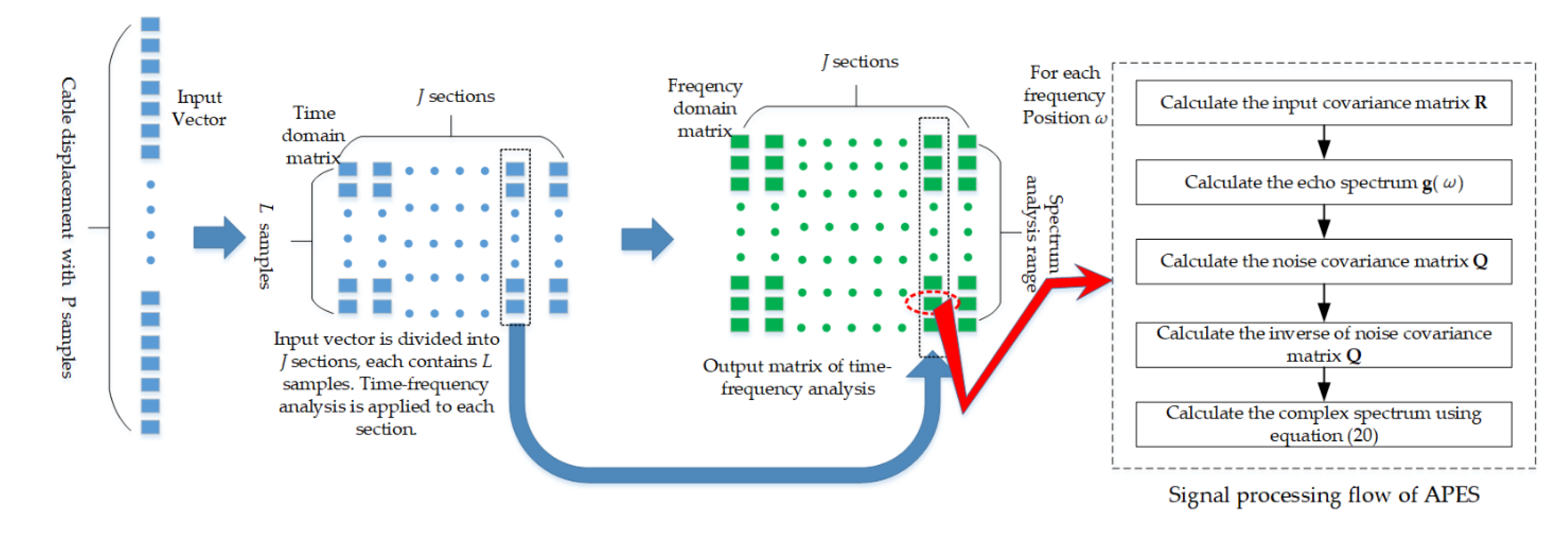
3.3. APES-Based Time-Frequency Analysis
- A long input displacement vector is filtered by a high-pass filter (HPF). The measured displacement always contains a DC offset component. There would be a large peak at 0 Hz in the spectrum. The sidelobe of the peak would be much larger than the peak of a cable’s fundamental frequency peak. So, a high-pass filter is used to suppress the adverse influence. There are many types of the HPF filter. The HPF filter in this manuscript is performed with a MATLAB function, called ‘smooth.’ The operation is formulated as . Where is the smooth length parameter of the ‘smooth’ function. The smaller the , the larger the cut-frequency of the HPF filter. Then, the filtered displacement is decimated by a reasonable factor to reduce the total data length and the computation load subsequently.
- The new vector is divided into sections of the same length with some proper overlapping factors.
- Each section is processed by the APES algorithm.
- Frequency peaks from APES output are extracted. Fundamental frequency can be preliminarily identified if its high harmonic frequencies exist. Then, the fundamental frequencies are further judged, according to the relation that they are inversely proportional to the cable length.
- The APES algorithm and fundamental frequency identification are applied repeatedly to all the divided sections. Then the dynamic cable-tension can be obtained.
4. Results
4.1. Frequency Estimation Precision and Super-Resolution Ablility
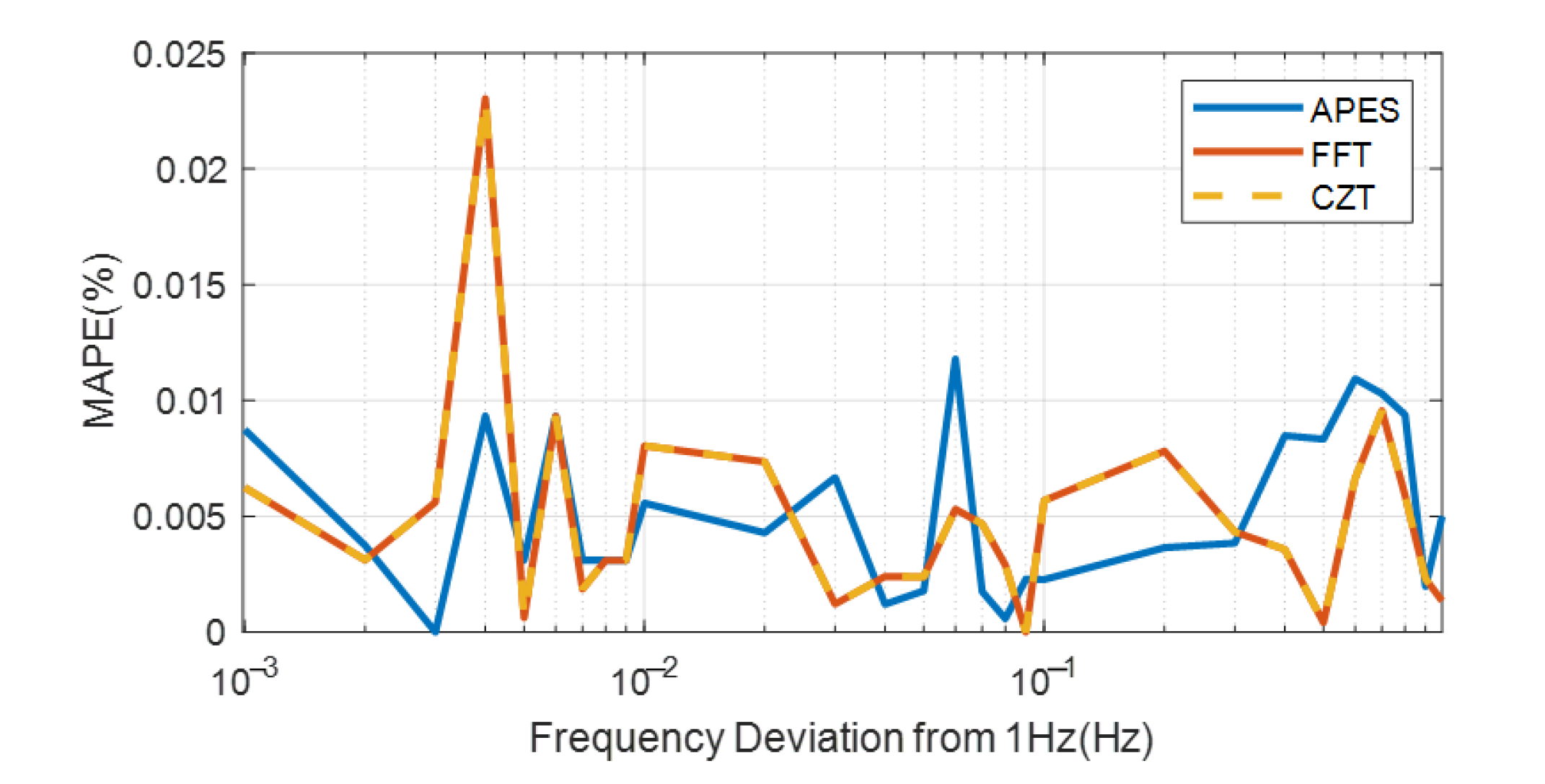
4.1.1. Single-Tone Frequency Estimation
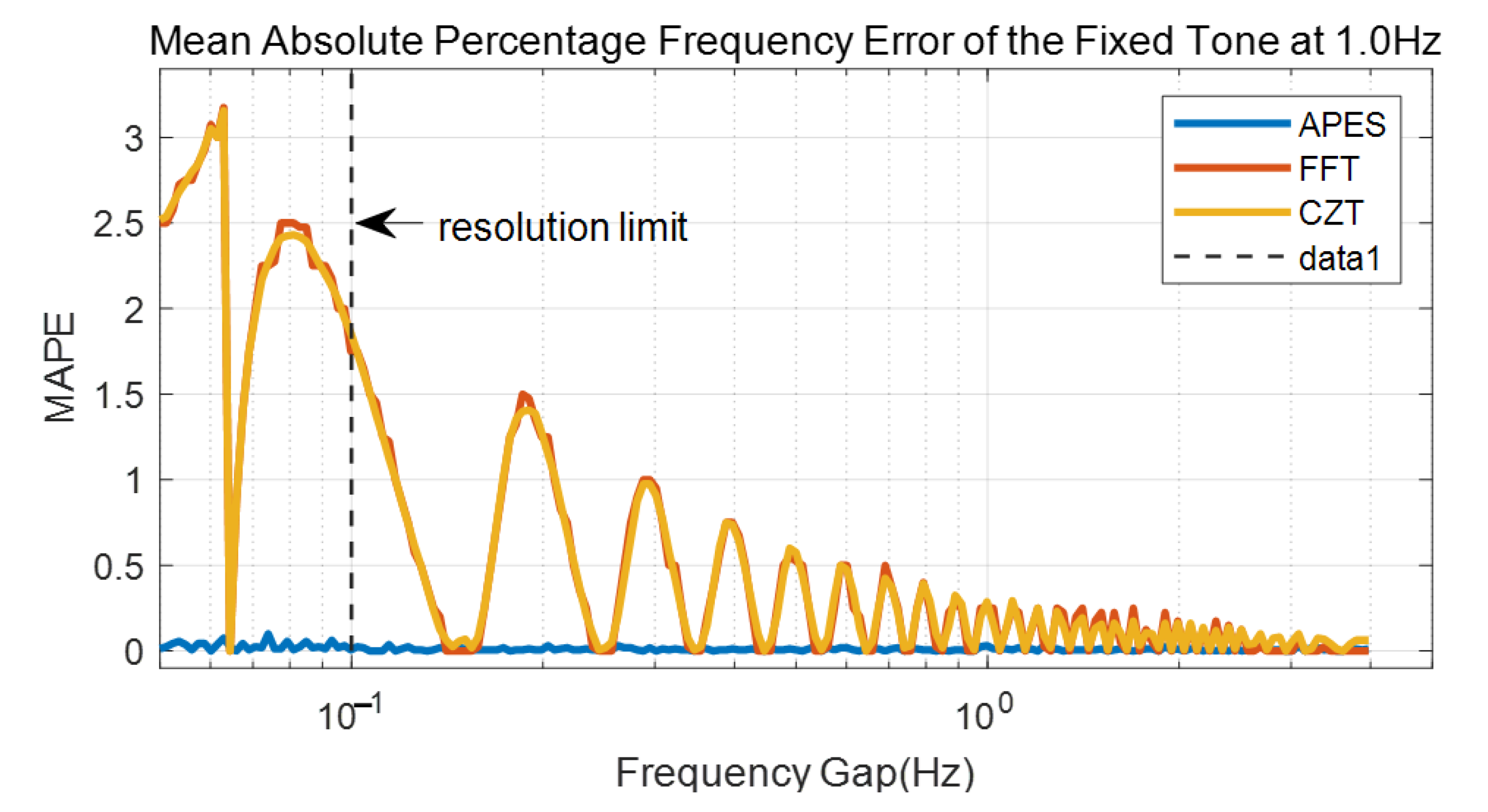
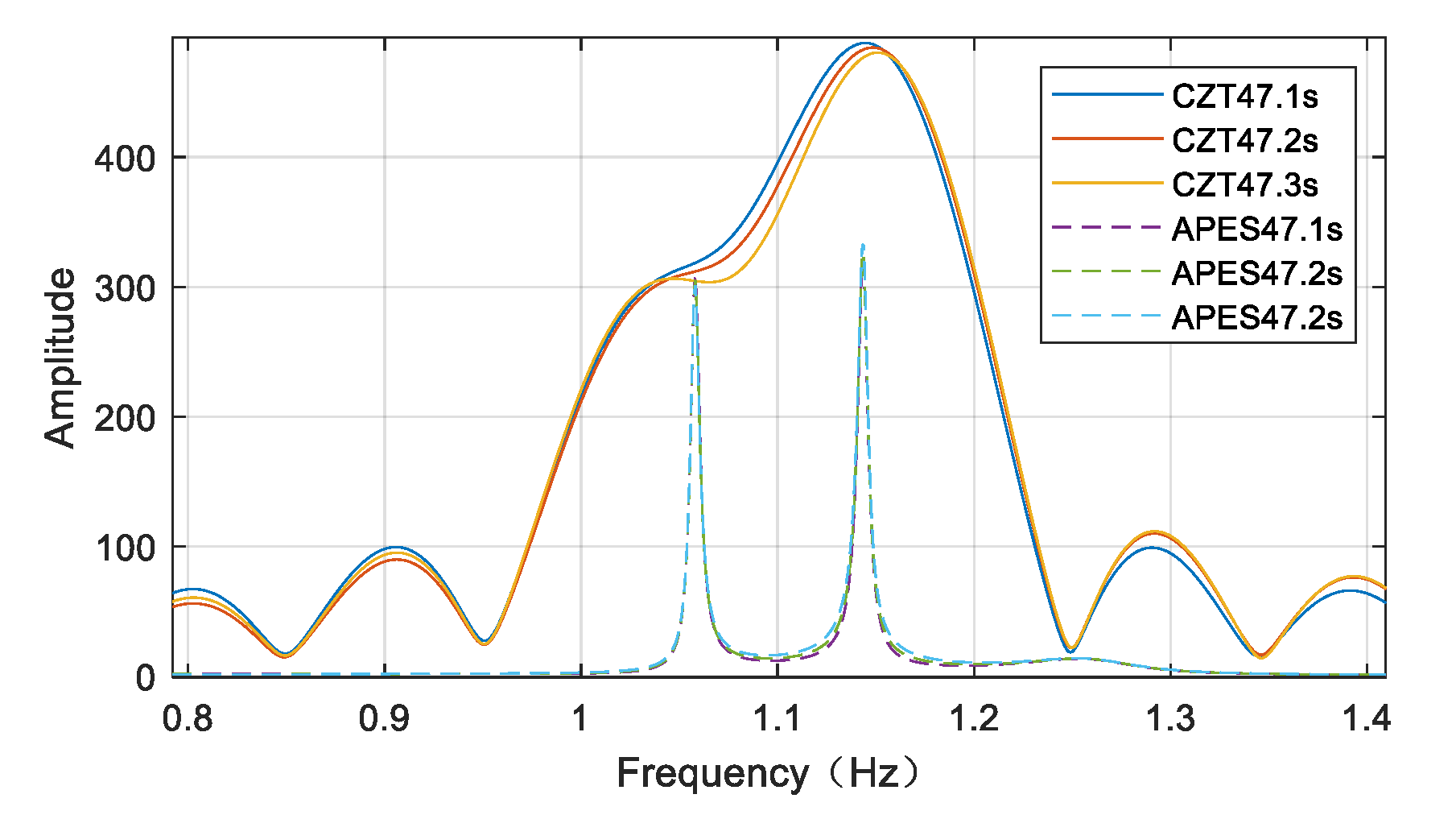
4.1.2. Double-Tone Signal Frequency Estimation
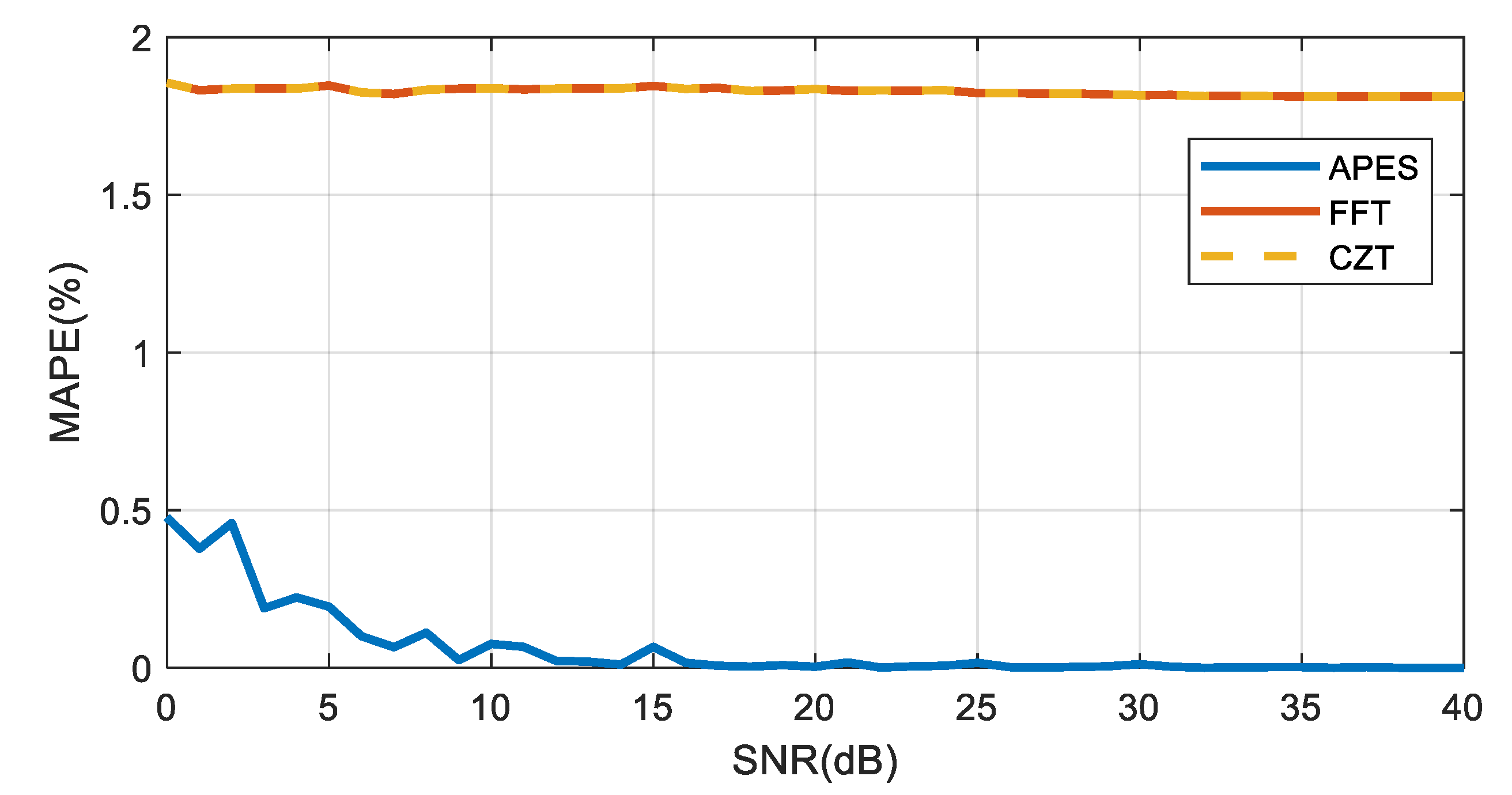
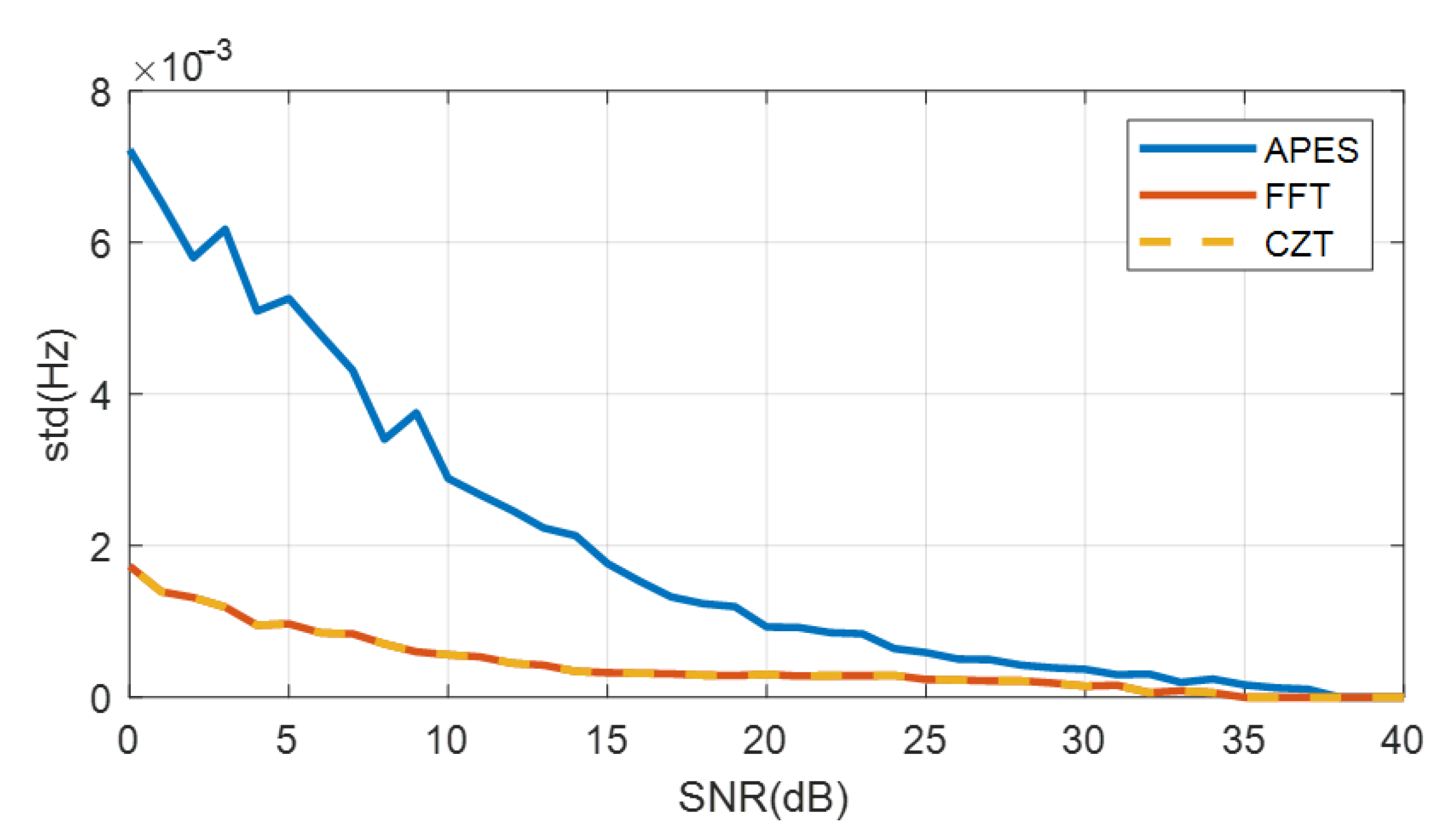
4.1.3. Frequency Estimation Performance vs. SNR
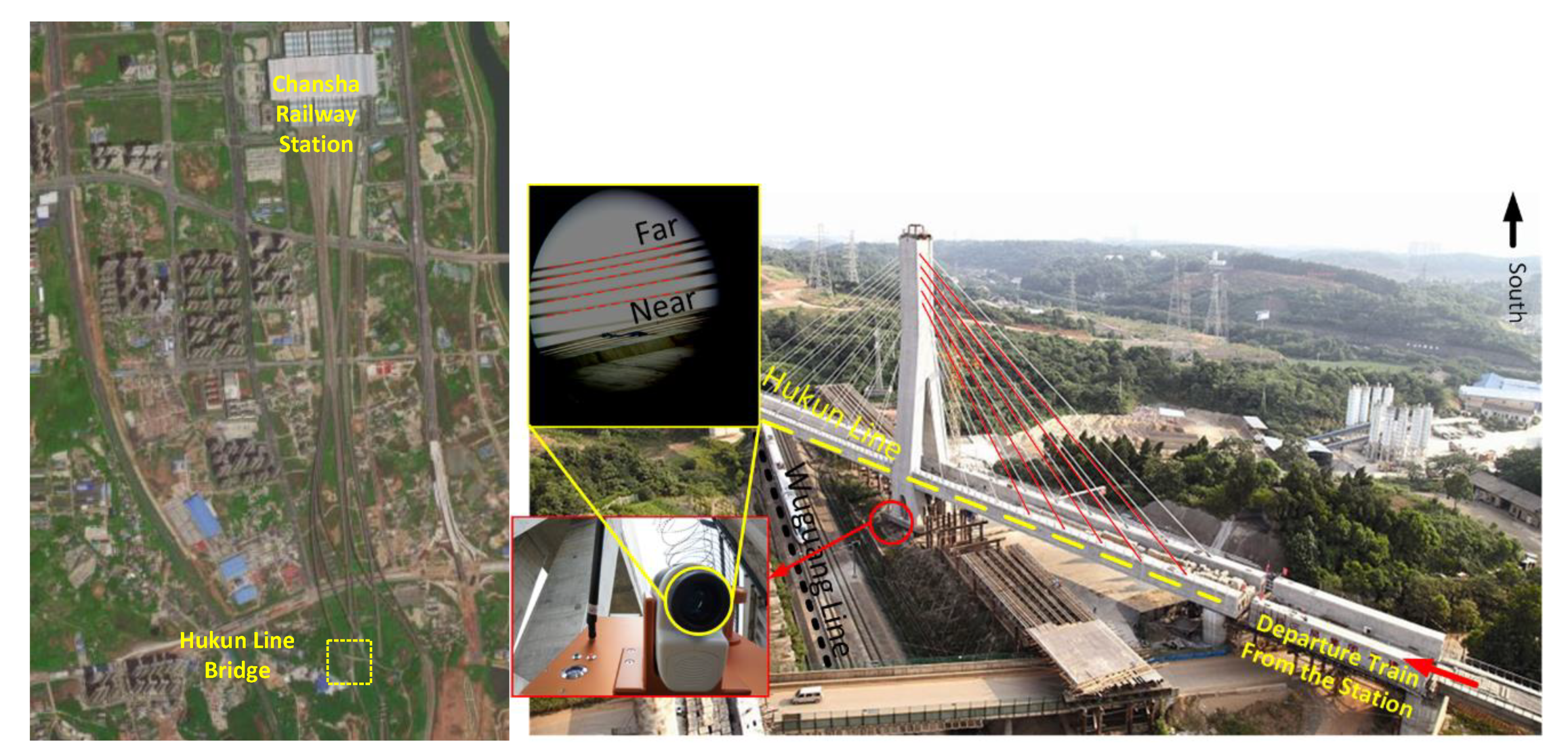
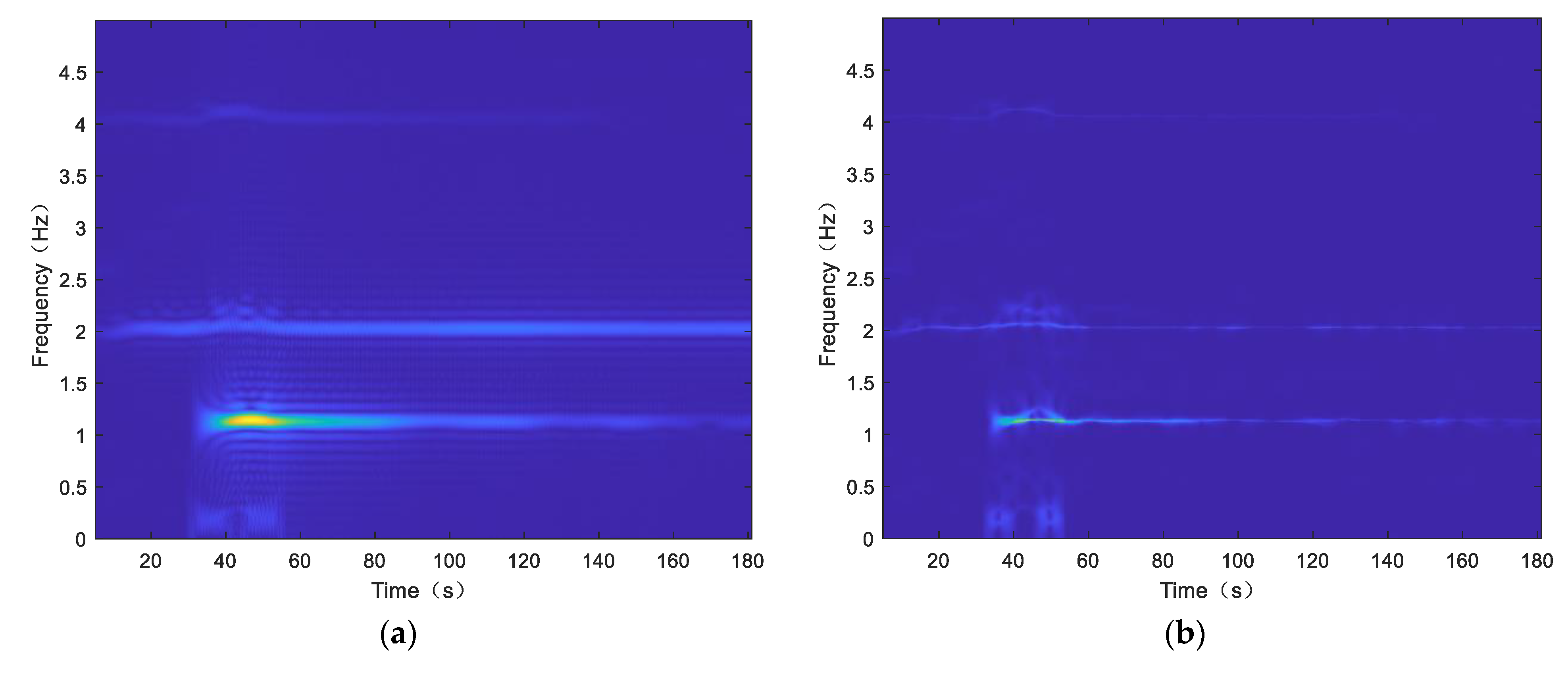
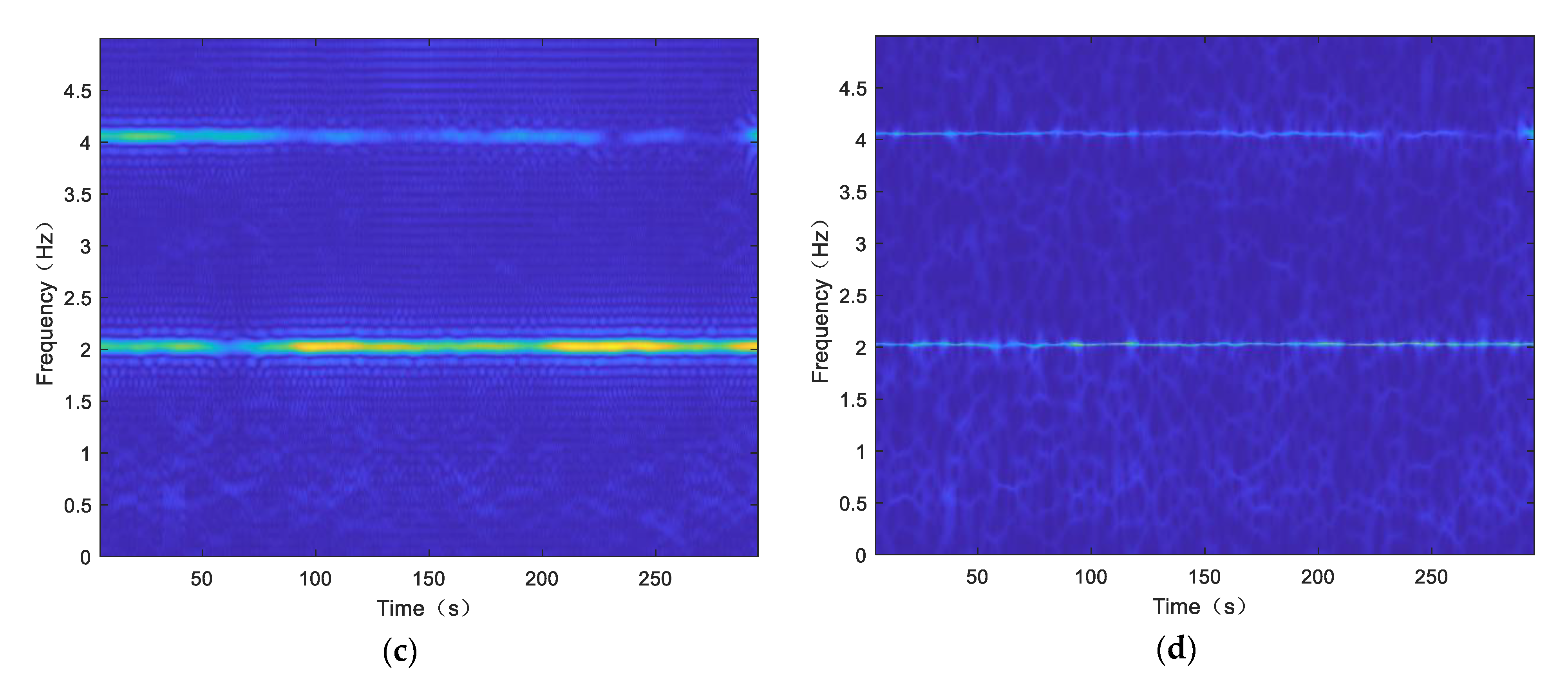
4.2. Dynamic Cable-Tension Analysis under the Impact of a High-Speed Train
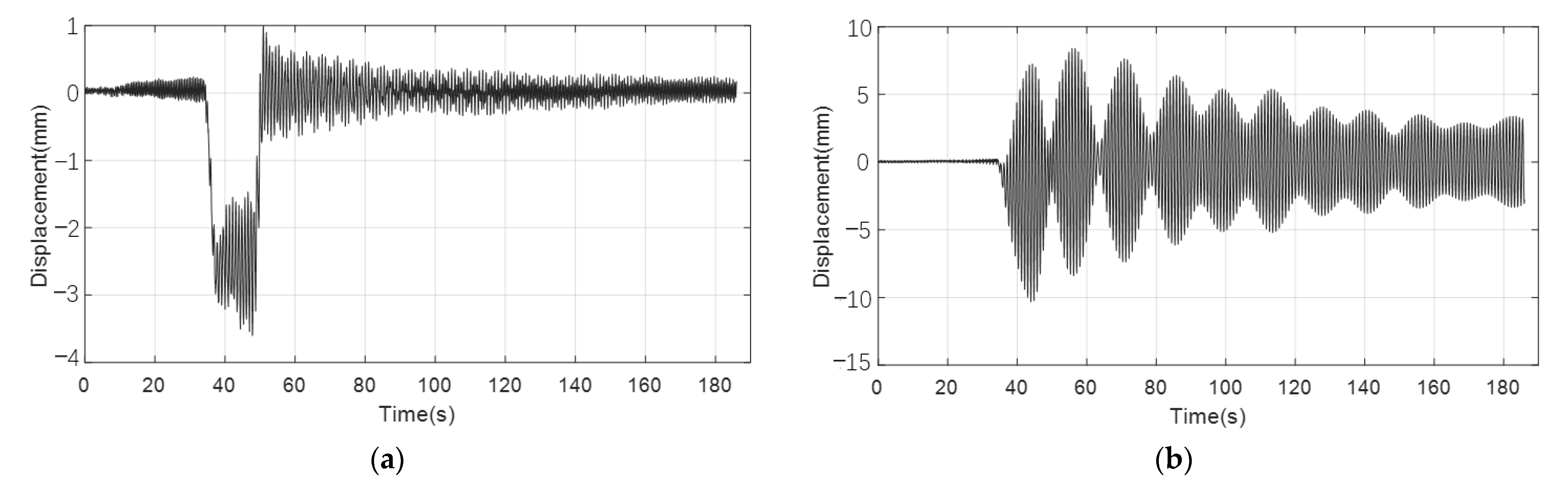
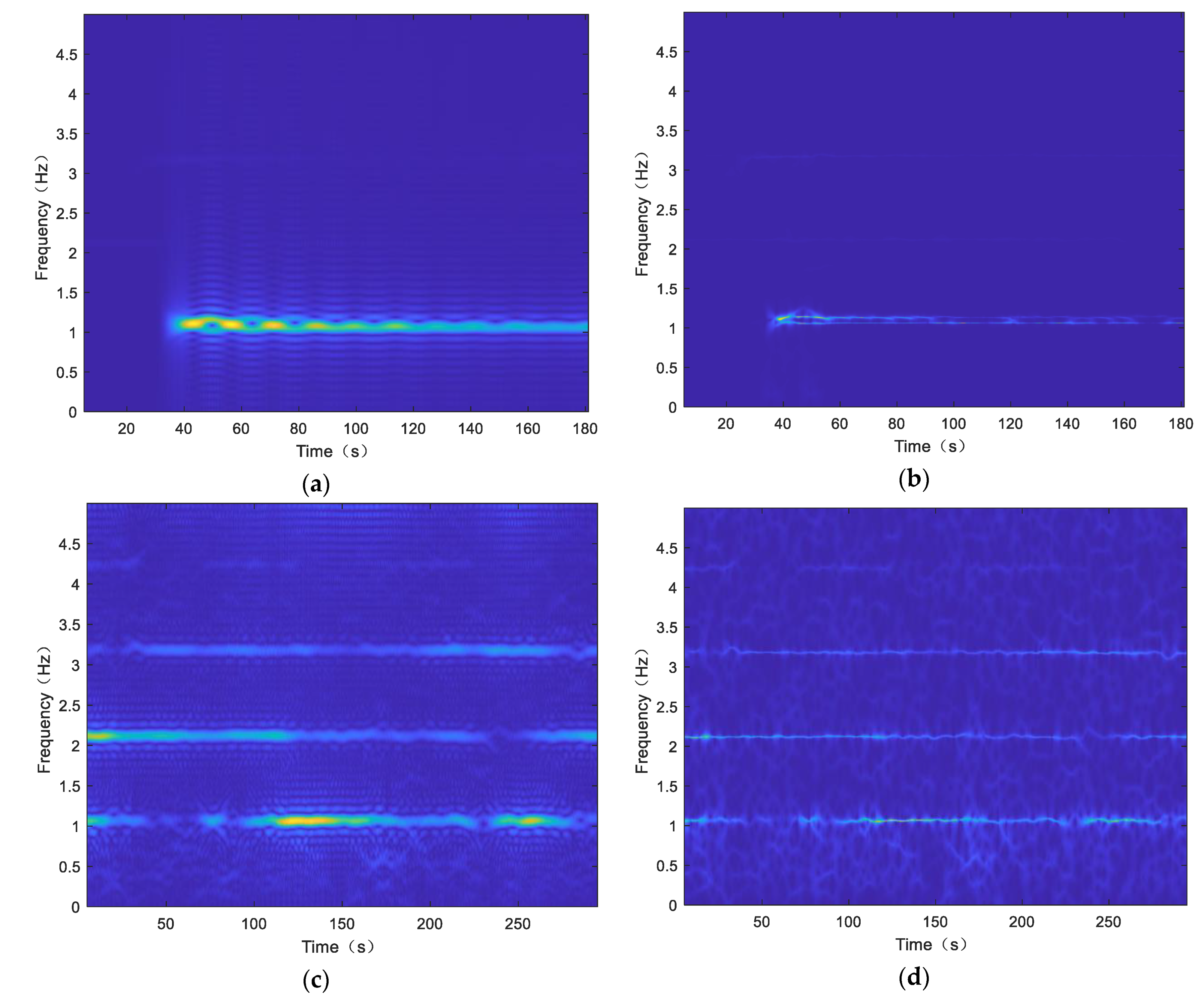
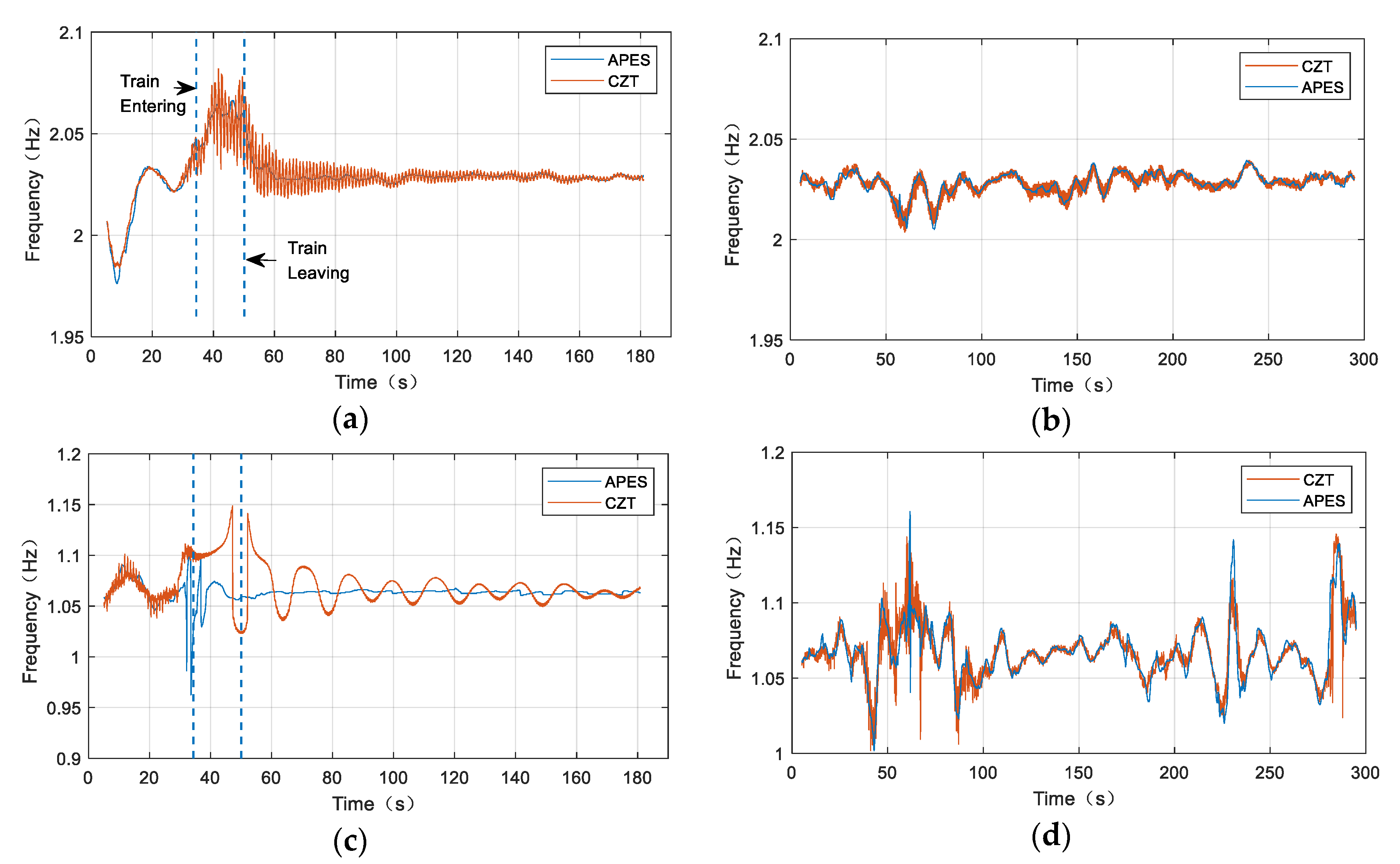
- When the frequency of interest is interfered by a nearby frequency component, the CZT method suffers fluctuated estimation. The smaller the frequency gap, the larger the fluctuating amplitude. Fortunately, the APES method can still achieve fine estimation. The curves after 50 s in Figure 11a,c are the cases.
- When the train embarks the bridge, the fundamental frequency increases. This means that the cable-tension increases. The increased tension phenomenon is observed in all the cables, so it is feasible to calculate the bridge load from the sum of all cables’ tension.
- The fundamental frequency curve in Figure 11a is complicated a short moment before the train enters the bridge. The cable-tension undergoes a decreasing and then increasing progress.
- Dynamic frequency estimation is also a challenge for the APES method, especially when the frequency component is not a stationary sinusoidal signal and be interfered by closely signals. This is the reason that the frequency curve of APES changes rapidly, in Figure 11c.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- List of Longest Bridges. Available online: https://en.wanweibaike.com/wiki-World’s%20longest%20bridge (accessed on 22 September 2020).
- Hassan, M.; Nassef, A.; El Damatty, A. Surrogate function of post-tensioning cable forces for cable-stayed bridges. Adv. Struct. Eng. 2013, 16, 559–578. [Google Scholar] [CrossRef]
- Wu, M.; Tang, D.; Cheng, M. Research of Cable-tension Sensor with Bypass Excitation Structure Based on Magneto-elastic Effect in Cable-stayed Bridge. In Proceedings of the World Congress on Intelligent Control & Automation, Chongqing, China, 25–27 June 2008; pp. 7560–7563. [Google Scholar]
- Kim, B.; Park, T. Estimation of cable-tension force using the frequency-based system identification method. J. Sound Vib. 2007, 304, 660–676. [Google Scholar] [CrossRef]
- Zhao, Z.; Sun, J.; Fei, X.; Liu, W.; Cheng, X.; Wang, Z.; Yang, H. Wireless Sensor Network Based Cable-tension Monitoring for Cable-stayed Bridges. In Proceedings of the 2012 14th International Conference on Advanced Communication Technology (ICACT), Pyeongchang, Korea, 19–22 February 2012; pp. 527–532. [Google Scholar]
- Shao, Z.; Zhang, X.; Li, Y.; Jiang, J. A Comparative Study on Radar Interferometric for Vibrations Monitoring on Different Types of Bridges. IEEE Access 2018, 6, 29677–29684. [Google Scholar] [CrossRef]
- Gentile, C. Application of microwave remote sensing to dynamic testing of stay-cables. Remote Sens. 2010, 2, 36–51. [Google Scholar] [CrossRef] [Green Version]
- Dong, H.; Wang, J.; Song, Q. A way of cable force measurement based on interference radar. In Proceedings of the Electromagnetic Research Symposium (PIERS), Shanghai, China, 8–11 August 2016. [Google Scholar]
- Zhao, W.; Zhang, G.; Zhang, J. Cable force estimation of a long-span cable-tayed bridge with microwave interferometric radar. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 1419–1433. [Google Scholar] [CrossRef]
- Gentile, C.; Bernardini, G. An interferometric radar for non-contact measurement of deflections on civil engineering structures: Laboratory and full-scale tests. Struct. Infrastruct. Eng. 2010, 6, 521–534. [Google Scholar] [CrossRef]
- Mehrabi, A.B.; Tabatabai, H. A unified finite difference formulation for free vibration of cables. J. Struct. Eng. ASCE 1998, 124, 1313–1322. [Google Scholar] [CrossRef]
- Su, D.; Tu, Y.; Ming, L.; Li, J. Comparative analysis of frequency estimation methods. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 5442–5447. [Google Scholar]
- Park, S.Y.; Song, Y.S.; Kim, H.J.; Park, J. Improved method for frequency estimation of sampled sinusoidal signals without iteration. IEEE Trans. Instrum. Meas. 2011, 60, 2828–2834. [Google Scholar] [CrossRef]
- Giarnetti, S.; Leccese, F.; Caciotta, M. Non recursive nonlinear least squares for periodic signal fitting. Meas. J. Int. Meas. Confed. 2017, 103, 208–216. [Google Scholar] [CrossRef]
- Spagnolo, G.S.; Cozzella, L.; Leccese, F. Phase correlation functions: FFT vs. FHT. Acta IMEKO 2019, 8, 87–92. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P.; Wang, Z. On robust Capon beamforming and diagonal loading. IEEE Trans. Signal Process. 2003, 51, 1702–1715. [Google Scholar]
- Li, J.; Stoica, P. An adaptive filtering approach to spectral estimation and SAR imaging. IEEE Trans. Signal Process. 1996, 44, 1469–1484. [Google Scholar]
- Stoica, P.; Li, H.; Li, J. A new derivation of the APES filter. IEEE Signal Processing Letters, Aug. 1999, 6, 205–206. [Google Scholar] [CrossRef]
- Liu, Z.; Li, H.; Li, J. Efficeint implementation of Capon and APES for spectral estimation. IEEE Trans. AES 1998, 34, 1314–1319. [Google Scholar]
- Larsson, E.; Stoica, P. Fast implementation of two-dimensional APES and Capon spectral estimators. Multidimens. Syst. Signal Process. 2002, 13, 35–54. [Google Scholar] [CrossRef]
- Glentis, G. A Fast Algorithm for APES and Capon Spectral Estimation. IEEE Trans. GRS 2008, 56, 4207–4220. [Google Scholar] [CrossRef]
- Knott, E.F.; Shaeffer, J.F.; Tuley, M.T. Radar Cross Section, 2nd ed.; Scitech Publishing, Inc.: Raleigh, NC, USA, 2004; pp. 195–196. [Google Scholar]
- Sarabandi, K.; Park, M. Millimeter-wave radar phenomenology of power lines and a polarimetric detection algorithm. IEEE Trans. Antennas Propag. 1999, 47, 1807–1813. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vector Length ( s) | Frequency Resolution (Hz) | PRF (Hz) | Section Length (point) | Section Overlap (point) | Filter Taps (orders) | Spectrum Analysis Range (Hz) | Spectrum Analysis Interval (Hz) |
| 10 | 0.1 | 20 | 200 | 180 | 100 | 0–5 | 0.000625 |
| Frequency Range | Band Width (GHz) | Sampling Frequency (MHz) | Antenna Gain (dBi) | Transmitting Power (dBmW) | PRF (Hz) | Decimate Factor |
| K band | 1 | 10 | 22 | 27 | 200 | 10:1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Wang, X.; Fan, C.; Li, Y.; Huang, X. Bridge Dynamic Cable-Tension Estimation with Interferometric Radar and APES-Based Time-Frequency Analysis. Electronics 2021, 10, 501. https://doi.org/10.3390/electronics10040501
Wang J, Wang X, Fan C, Li Y, Huang X. Bridge Dynamic Cable-Tension Estimation with Interferometric Radar and APES-Based Time-Frequency Analysis. Electronics. 2021; 10(4):501. https://doi.org/10.3390/electronics10040501
Chicago/Turabian StyleWang, Jian, Xiang Wang, Chongyi Fan, Yueli Li, and Xiaotao Huang. 2021. "Bridge Dynamic Cable-Tension Estimation with Interferometric Radar and APES-Based Time-Frequency Analysis" Electronics 10, no. 4: 501. https://doi.org/10.3390/electronics10040501