
Development and Simulation of Motion Control System for Small Satellites Formation


Abstract
:1. Introduction
2. Satellite Formation Modeling
3. Problem Statement
4. Control Law Design Based on Passivity Concept
5. Projection Circular Orbits
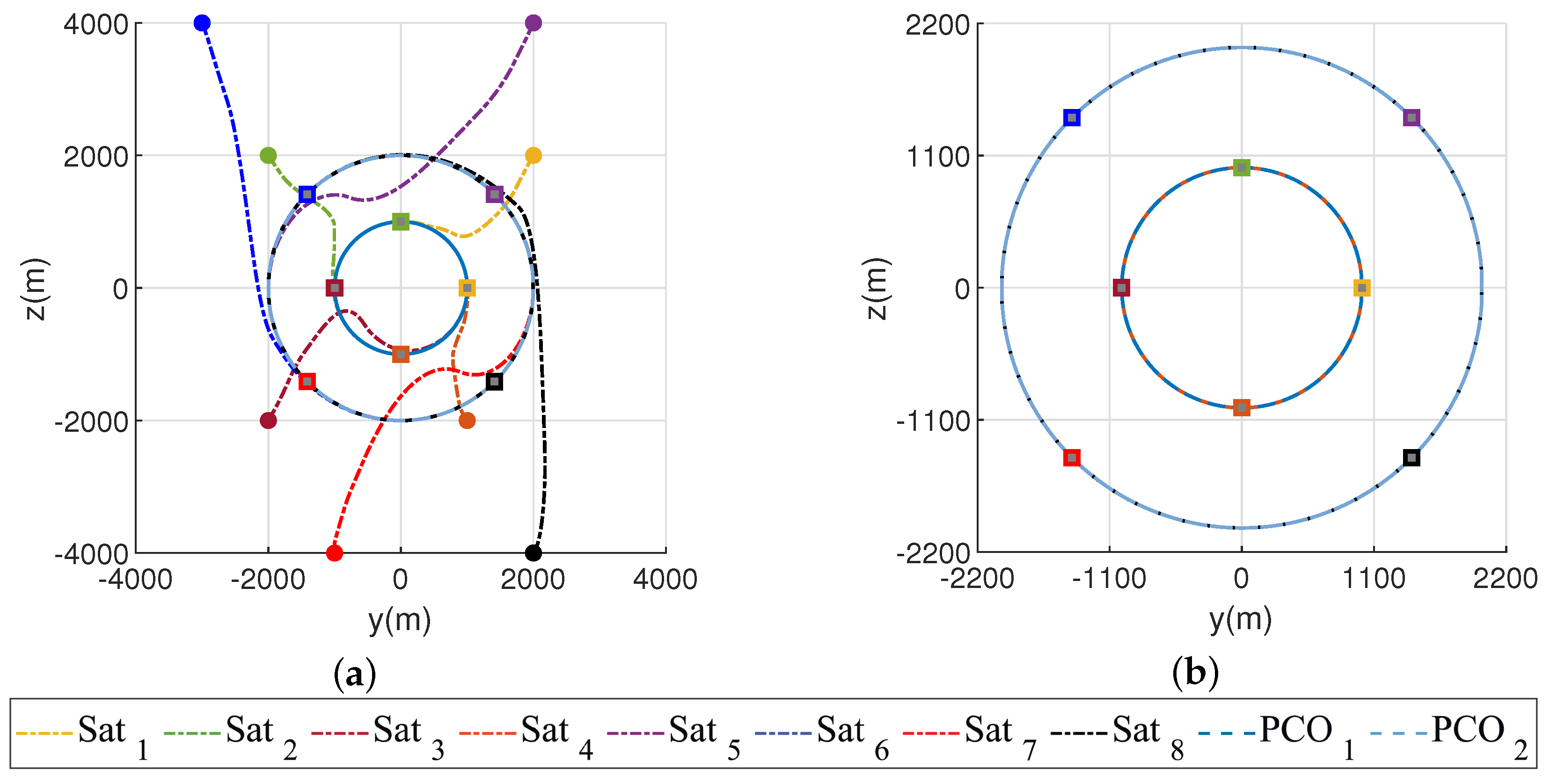
- The choice , sets the configuration in which the slave satellite moves around the master satellite so that the projection of its movement on the local horizontal plane is the circle , where is a constant. Such an orbit is called a projection circular orbit (see Figure 2a).
- Selection , , sets the configuration in which the slave satellite moves around the master satellite in circles in the axes x, y and z of the local coordinate system: . This orbit is called the general circular orbit (GCO).
- Choice , sets the master–slave or along-track orbit (ATO) configuration, where the slave satellite follows the master satellite along its orbit with a constant offset (see Figure 2b).
6. Control of PCO Constellation
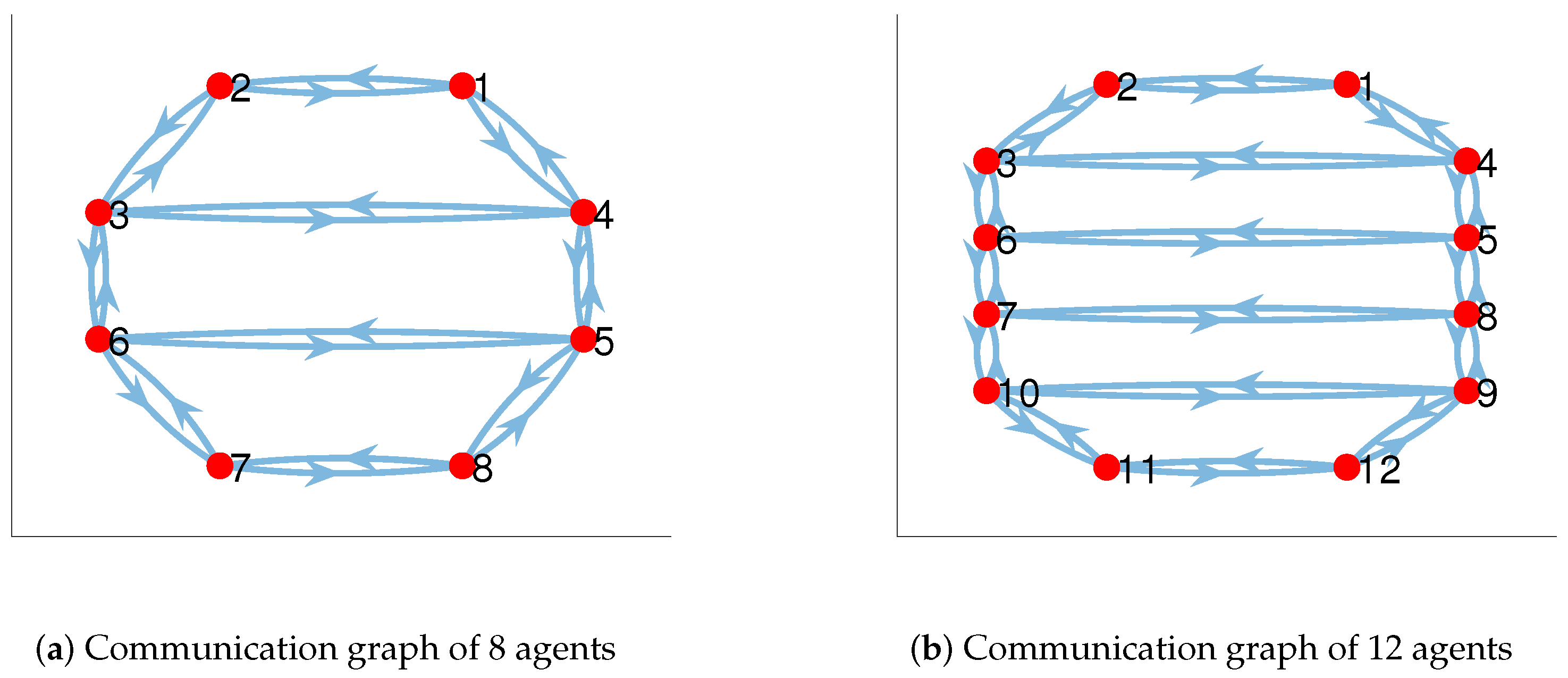
7. Multi-Agent Control and Consensus Algorithm
7.1. Basic Information on Consensus Algorithm
7.2. Consensus-Based Satellite Formation Control Law
8. Simulation Results
8.1. Simulation for Motion of 8 Satellites in Two PCO Orbits
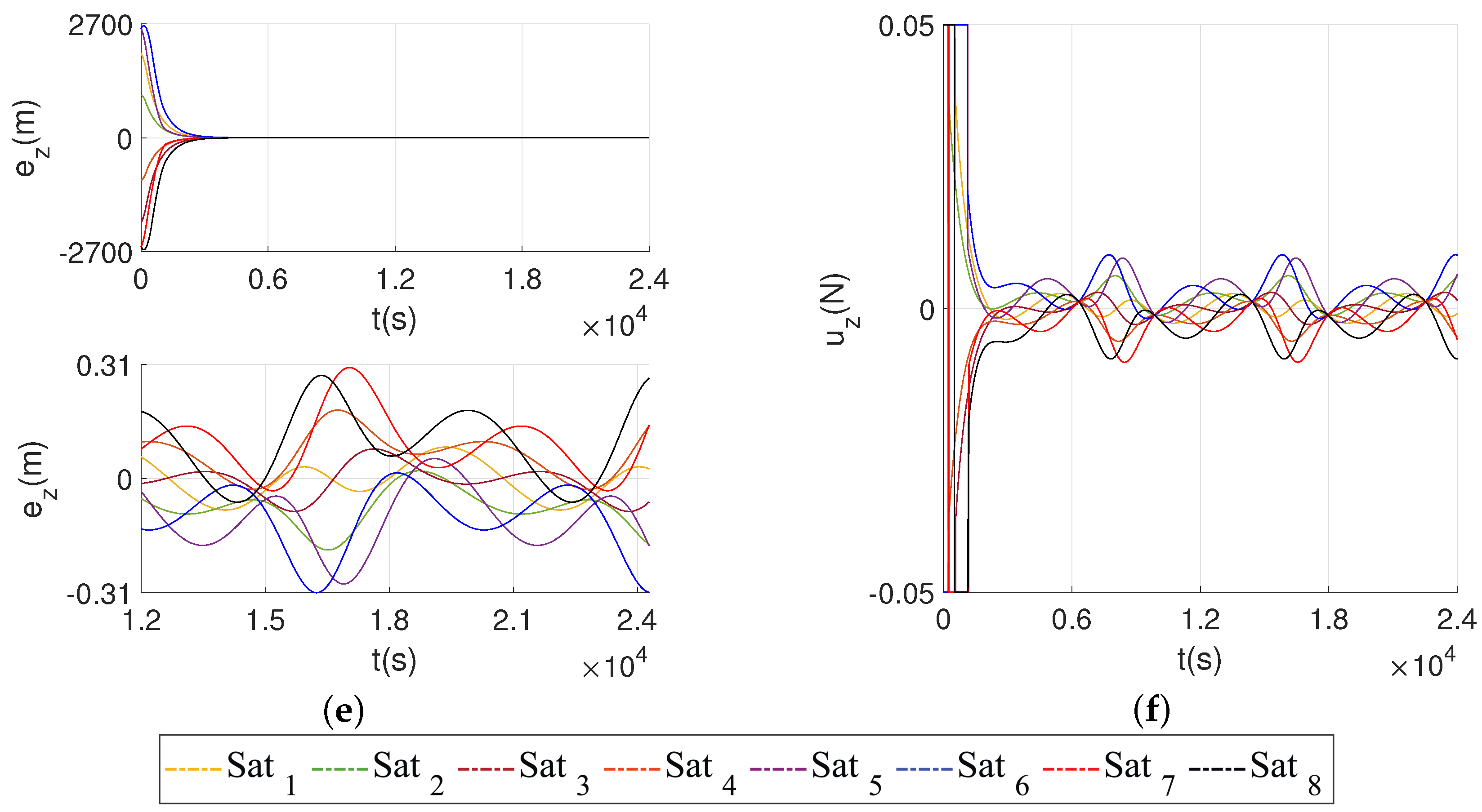
8.2. Simulation the PD Laws and PDC Control Laws
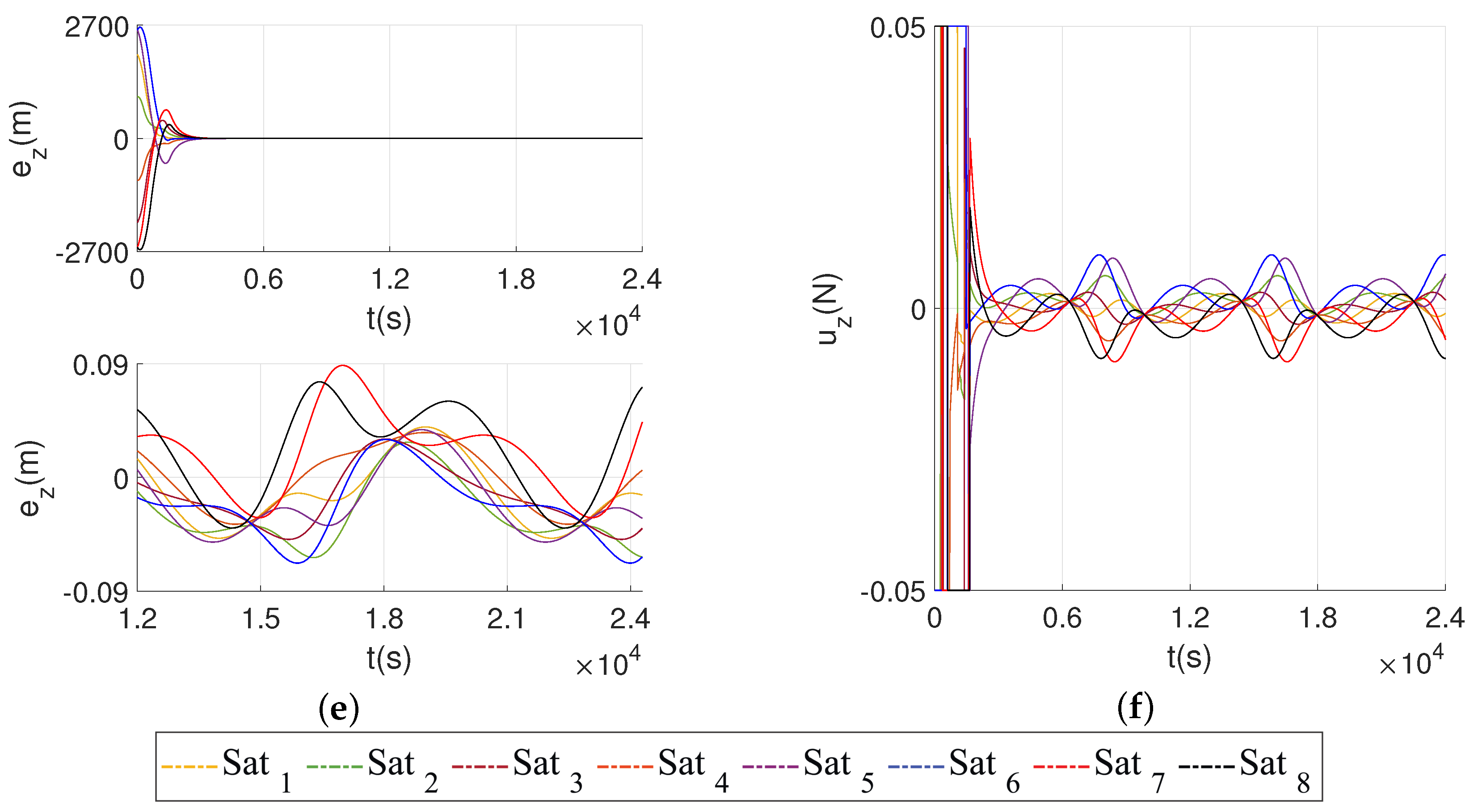
8.3. Simulation the PB Laws and PBC Control Laws
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ATO | Along-Track Orbit |
| GCO | General Circular Orbit |
| HCW | Hill–Clohessy–Wiltshire |
| LVLH | Local-Vertical Local-Horizontal |
| PCO | Projected Circular Orbit |
| PD | Proportional-Differential |
| PDC | Proportional-Differential-Consensus |
| PB | Passification-Based |
| PBC | Passification-Based Consensus |
| SDRE | State-Dependent Riccati Equation |
References
- Alfriend, K.; Vadali, S.; Gurfil, P. Spacecraft Formation Flying; Butterworth-Heinemann: Oxford, UK, 2010. [Google Scholar]
- Mathavaraj, S.; Padhi, R. Satellite Formation Flying. High Precision Guidance using Optimal and Adaptive Control Techniques; Springer Nature: Singapore, 2021. [Google Scholar] [CrossRef]
- Sengupta, P.; Vadali, S.; Alfriend, K. Modeling and control of satellite formations in high eccentricity orbits. J. Astronaut Sci. 2004, 52, 149–168. [Google Scholar] [CrossRef]
- Wu, B.; Cao, X. Decentralized control for spacecraft formation in elliptic orbits. Aircr. Eng. Aerosp. Technol. 2017, 90, 166–174. [Google Scholar] [CrossRef]
- Andrievsky, B.; Fradkov, A.L.; Kudryashova, E.V. Control of Two Satellites Relative Motion over the Packet Erasure Communication Channel with Limited Transmission Rate Based on Adaptive Coder. Electronics 2020, 9, 2032. [Google Scholar] [CrossRef]
- Tirop, P.; Jingrui, Z. Review of Control Methods and Strategies of Space Tether Satellites. Am. J. Traffic Transp. Eng. 2019, 4, 137–148. [Google Scholar] [CrossRef]
- Godard; Kumar, K. Fault Tolerant Reconfigurable Satellite Formations Using Adaptive Variable Structure Techniques. J. Guid. Control Dyn. 2010, 33, 969–984. [Google Scholar] [CrossRef]
- Kim, D.; Woo, B.; Park, S.; Choi, K. Hybrid optimization for multiple-impulse reconfiguration trajectories of satellite formation flying. Life Sci. Space Res. 2009, 44, 1257–1269. [Google Scholar] [CrossRef]
- Vaddi, S.S.; Alfriend, K.T.; Vadali, S.R.; Sengupta, P. Formation Establishment and Reconfiguration Using Impulsive Control. J. Guid. Control Dyn. 2005, 28, 262–268. [Google Scholar] [CrossRef]
- Lim, H.C.; Bang, H.C. Trajectory Planning of Satellite Formation Flying using Nonlinear Programming and Collocation. J. Astron. Space Sci. 2008, 25, 361–374. [Google Scholar] [CrossRef]
- Eyer, J. A Dynamics and Control Algorithm for Low Earth Orbit Precision Formation Flying Satellites. Ph.D. Thesis, Graduate Department of Aerospace Science and Engineering, University of Toronto, Toronto, ON, Canada, 2009. [Google Scholar]
- Bonin, G.; Roth, N.; Armitage, S.; Newman, J.; Risi, B.; Zee, R. Can-4 and CanX-5 Precision Formation Flight: Mission Accomplished! In Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 8–13 August 2015; Univ. of Toronto Inst. for Aerospace Studies: Toronto, ON, Canada, 2015. [Google Scholar]
- Ulrich, S. Nonlinear passivity-based adaptive control of spacecraft formation flying. Am. Control. Conf. 2016, 7432–7437. [Google Scholar] [CrossRef]
- de Queiroz, M.S.; Kapila, V.; Yan, Q. Adaptive Nonlinear Control of Multiple Spacecraft Formation Flying. J. Guid. Control Dyn. 2000, 23, 385–390. [Google Scholar] [CrossRef]
- Wong, H.; Kapila, V.; Sparks, A. Adaptive output feedback tracking control of multiple spacecraft. In Proceedings of the 2001 American Control Conference (Cat. No.01CH37148), Arlington, VA, USA, 25–27 June 2001; Volume 2, pp. 698–703. [Google Scholar] [CrossRef]
- Shahid, K.; Kumar, K. Satellite formation flying using variable structure model reference adaptive control. Proc. Inst. Mech. Eng. Part G—J. Aerosp. Eng. 2009, 223, 271–283. [Google Scholar] [CrossRef]
- Zou, A.M.; Kumar, K.D. Distributed Attitude Coordination Control for Spacecraft Formation Flying. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1329–1346. [Google Scholar] [CrossRef]
- Leonard, C.L.; Hollister, W.M.; Bergmann, E.V. Orbital formationkeeping with differential drag. J. Guid. Control Dyn. 1989, 12, 108–113. [Google Scholar] [CrossRef]
- Bevilacqua, R.; Hall, J.; Romano, M. Multiple spacecraft rendezvous maneuvers by differential drag and low thrust engines. Celest. Mech. Dyn. Astron. 2010, 106, 69–88. [Google Scholar] [CrossRef]
- Bevilacqua, R.; Romano, M. Rendezvous Maneuvers of Multiple Spacecraft Using Differential Drag Under J2 Perturbation. J. Guid. Control Dyn. 2008, 31, 1595–1607. [Google Scholar] [CrossRef] [Green Version]
- Shirobokov, M.; Trofimov, S. Formation control in low-earth orbits by means of machine learning methods. Prepr. Keldysh Inst. 2020, 19, 1–32. (In Russian) [Google Scholar] [CrossRef]
- Shirobokov, M.; Trofimov, S.; Ovchinnikov, M. Survey of machine learning techniques in spacecraft control design. Acta Astronaut. 2021, 186, 87–97. [Google Scholar] [CrossRef]
- Andrievsky, B.; Kuznetsov, N.; Popov, A. Algorithms for aerodynamic control of relative motion two satellites in a near circular orbit. Differ. Equ. Control Process. 2020, 4, 28–58. (In Russian) [Google Scholar]
- Baranov, A.; Chernov, N. Energy cost analysis to station keeping for satellite formation type “TerraSAR-X—TanDEM-X”. Rudn. J. Eng. Res. 2019, 20, 220–228. [Google Scholar] [CrossRef] [Green Version]
- Baranov, A.; Baranov, A. Maintenance of Preset Configuration of a Satellite Constellation. Kosm. Issled. 2009, 47, 48–54. [Google Scholar]
- Gunchenko, M.; Ulybyshev, Y. Long-term linear-quadratic control of satellite constellations in highly elliptical orbits. J. Comput. Syst. Sci. Int. 2018, 57, 482–493. [Google Scholar] [CrossRef]
- Vaddi, S. Modeling and Control of Satellite Formations. Ph.D. Thesis, Department of Aerospace Engineering, Texas A&M University, College Station, TX, USA, 2003. [Google Scholar]
- Ivanov, D.; Monakhova, U.; Ovchinnikov, M. Nanosatellites swarm deployment using decentralized differential drag-based control with communicational constraints. Acta Astronaut. 2019, 159, 646–657. [Google Scholar] [CrossRef]
- Scharnagl, J.; Kempf, F.; Schilling, K. Combining Distributed Consensus with Robust H∞-Control for Satellite Formation Flying. Electronics 2019, 8, 319. [Google Scholar] [CrossRef] [Green Version]
- Park, H.E.; Park, S.Y.; Choi, K.H. Satellite formation reconfiguration and station-keeping using state-dependent Riccati equation technique. Aerosp. Sci. Technol. 2011, 15, 440–452. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Fradkov, A.L.; Druzhinina, M.V. Reduced order shunt nonlinear adaptive controller. In Proceedings of the 1997 European Control Conference (ECC), Brussels, Belgium, 1–4 July 1997; pp. 1231–1236. [Google Scholar]
- Andrievsky, B.; Fradkov, A. Method of passification in adaptive control, estimation, and synchronization. Autom. Remote Control 2006, 67, 1699–1731. [Google Scholar] [CrossRef]
- Barkana, I. Output feedback stabilizability and passivity in nonstationary and nonlinear systems. Int. J. Adapt. Control. Signal Process. 2010, 24, 568–591. [Google Scholar] [CrossRef]
- Vaddi, S.; Alfriend, K.; Vadali, S. Formation Flying: Accommodating Nonlinearity and Eccentricity Perturbations. J. Guid. Control Dyn. 2003, 26, 214–223. [Google Scholar] [CrossRef]
- Chobotov, V. Orbital Mechanics; AIAA Education Series; American Institute of Aeronautics & Astronautics: Reston, VA, USA, 2002. [Google Scholar]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-Vehicle Cooperative Control; Springer: London, UK, 2008. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Automat. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Atkins, E. Distributed multi-vehicle coordinated control via local information exchange. Int. J. Robust Nonlinear Control 2007, 17, 1002–1033. [Google Scholar] [CrossRef] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite # | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| m | 1000 | 666.7 | −1000 | −500 | 1000 | −250 | −666.7 | 500 |
| m | 2000 | −2000 | −2000 | 1000 | 2000 | −3000 | −1000 | 2000 |
| m | 2000 | 2000 | −2000 | −2000 | 4000 | 4000 | −4000 | −4000 |
| m/s | 0.0004 | 0.0004 | 0.0004 | 0.0004 | 0.0004 | 0.0004 | 0.0004 | 0.0004 |
| m/s | 0.0002 | 0.0002 | −0.0002 | 0.0002 | −0.0002 | 0.0004 | −0.0002 | −0.0005 |
| m/s | 0.0008 | −0.0008 | −0.0008 | 0.0008 | 0.0008 | −0.0008 | 0.0008 | −0.0008 |
| Mode | , cm | , cm | , cm |
|---|---|---|---|
| PD | 33 | 12 | 31 |
| PDC | 21 | 7.5 | 20 |
| PB | 23 | 9 | 23 |
| PBC | 11 | 4 | 9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Popov, A.M.; Kostin, I.; Fadeeva, J.; Andrievsky, B. Development and Simulation of Motion Control System for Small Satellites Formation. Electronics 2021, 10, 3111. https://doi.org/10.3390/electronics10243111
Popov AM, Kostin I, Fadeeva J, Andrievsky B. Development and Simulation of Motion Control System for Small Satellites Formation. Electronics. 2021; 10(24):3111. https://doi.org/10.3390/electronics10243111
Chicago/Turabian StylePopov, Alexander M., Ilya Kostin, Julia Fadeeva, and Boris Andrievsky. 2021. "Development and Simulation of Motion Control System for Small Satellites Formation" Electronics 10, no. 24: 3111. https://doi.org/10.3390/electronics10243111