
Exploiting Solar Energy during an Aerial Mapping Mission on a Lightweight UAV

Abstract
:1. Introduction
1.1. Options for Extending the Endurance of Lightweight UAVs
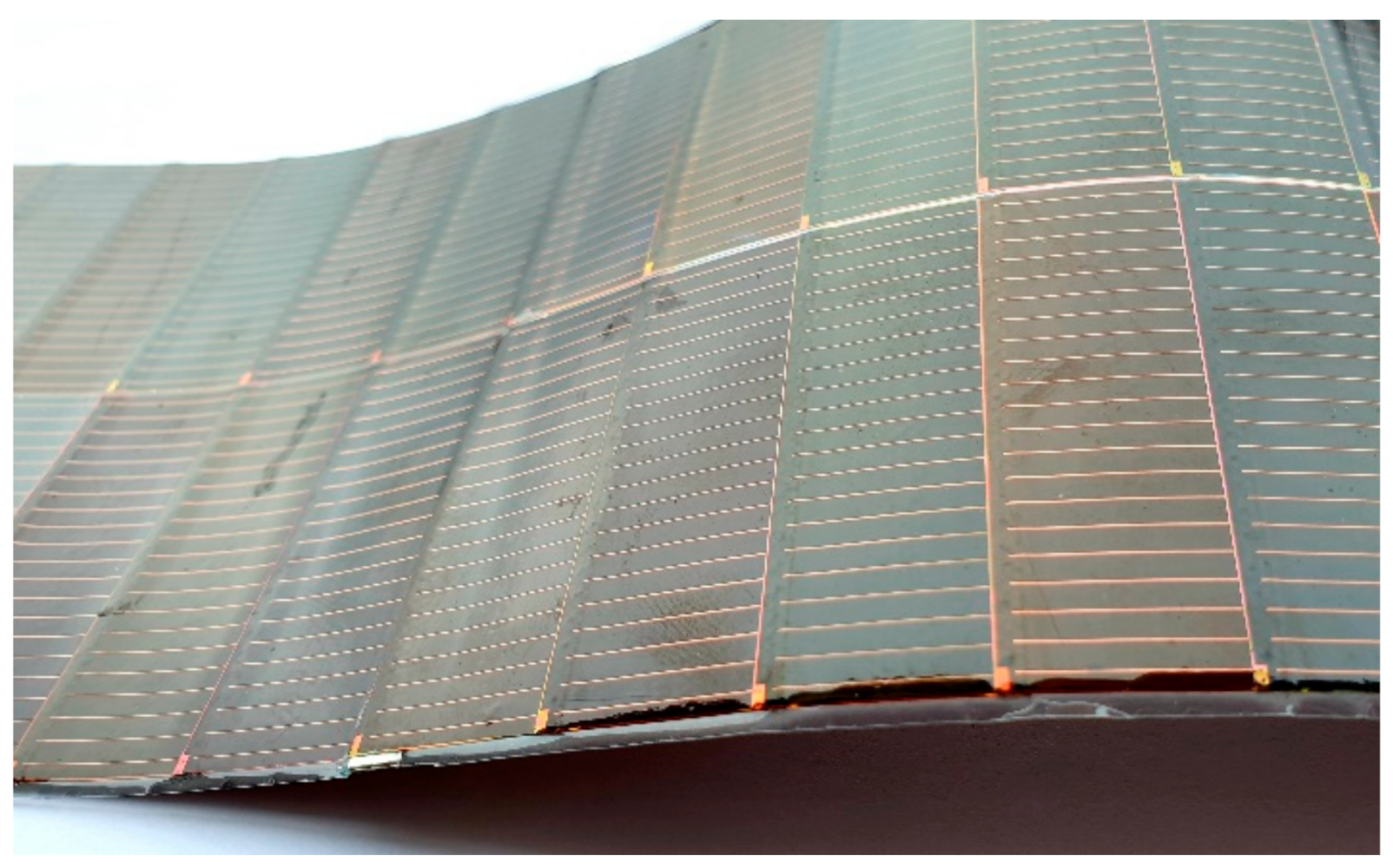
1.2. Overview of the Flexible Solar Modules Available on the Market
1.3. Purpose, Goals and Innovative Aspects of this Study
1.4. Structure of This Study
2. Scientific Background and Related Research Work
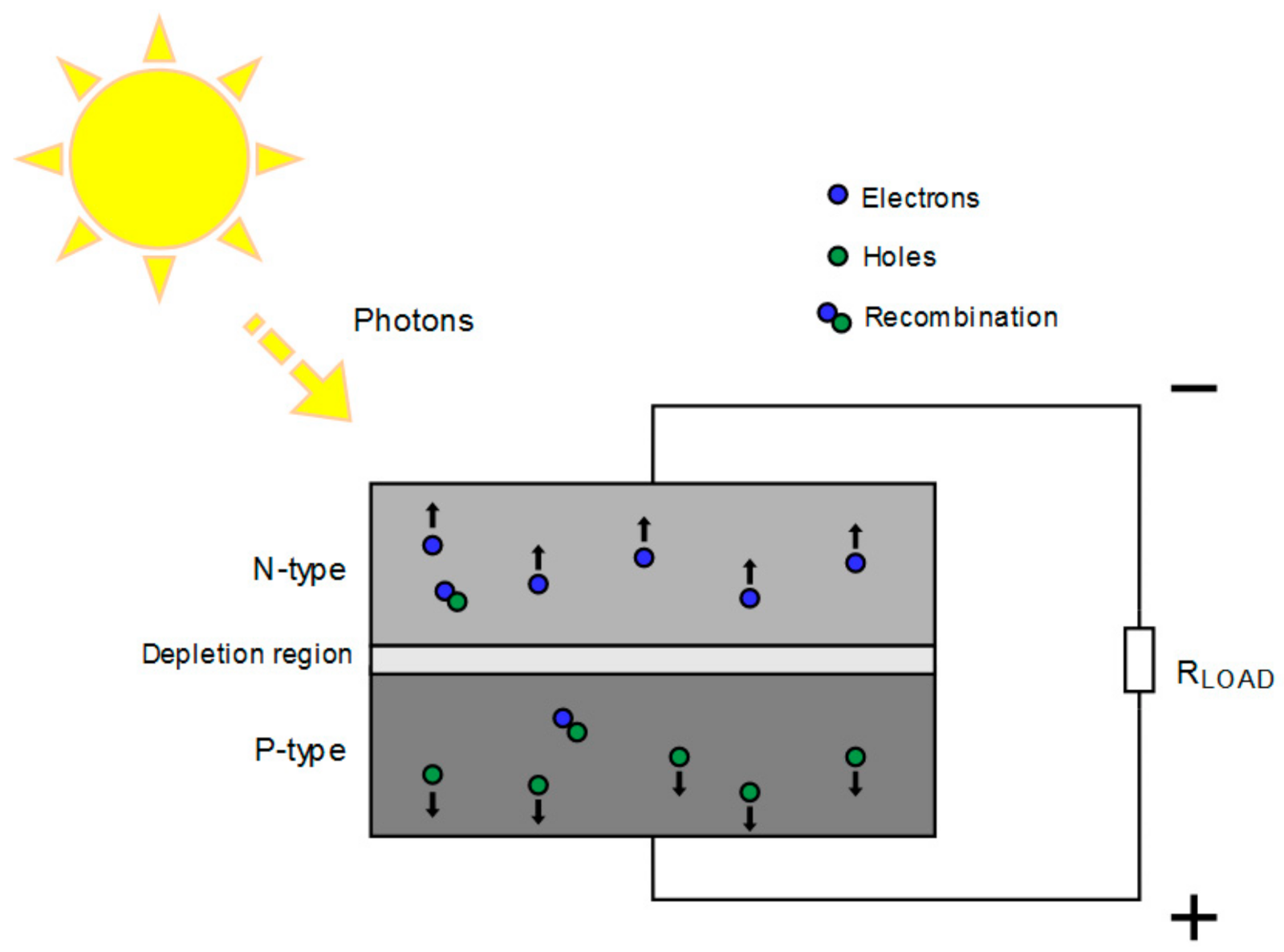
2.1. Electromagnetic Radiation and Photovoltaic Effect
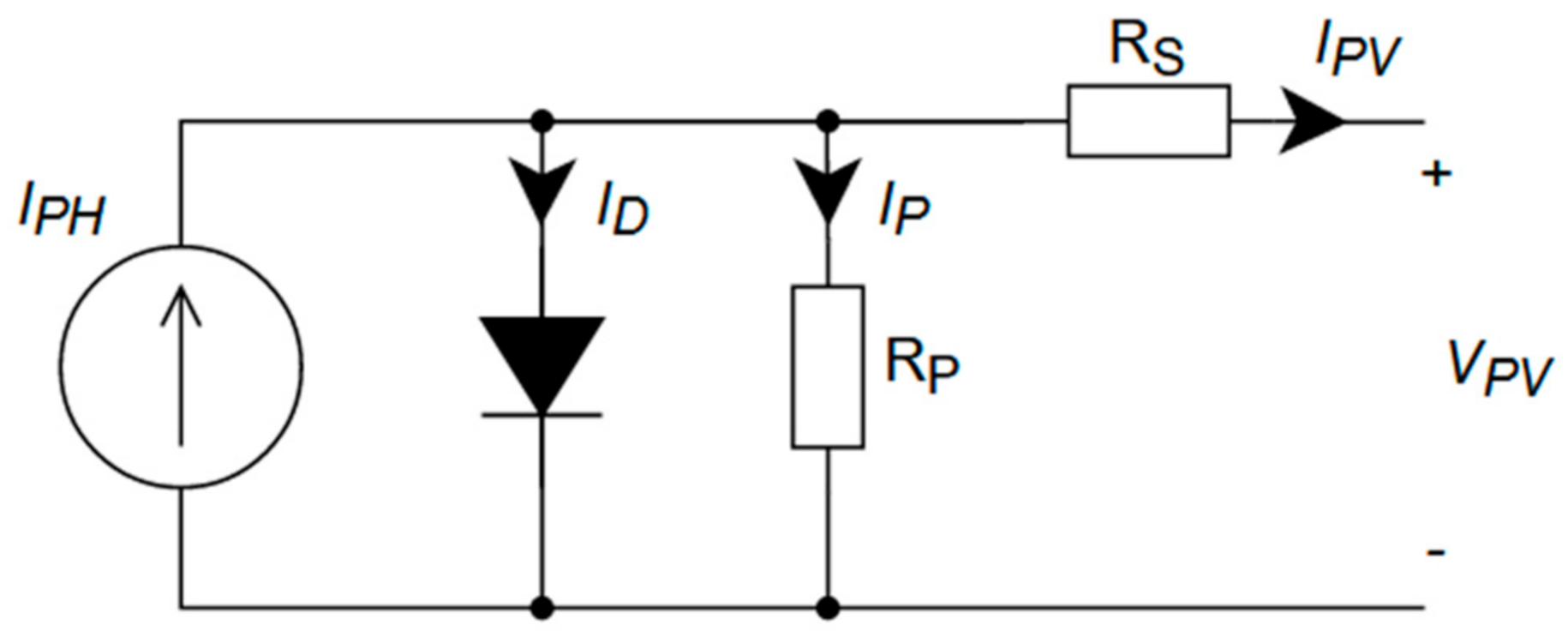
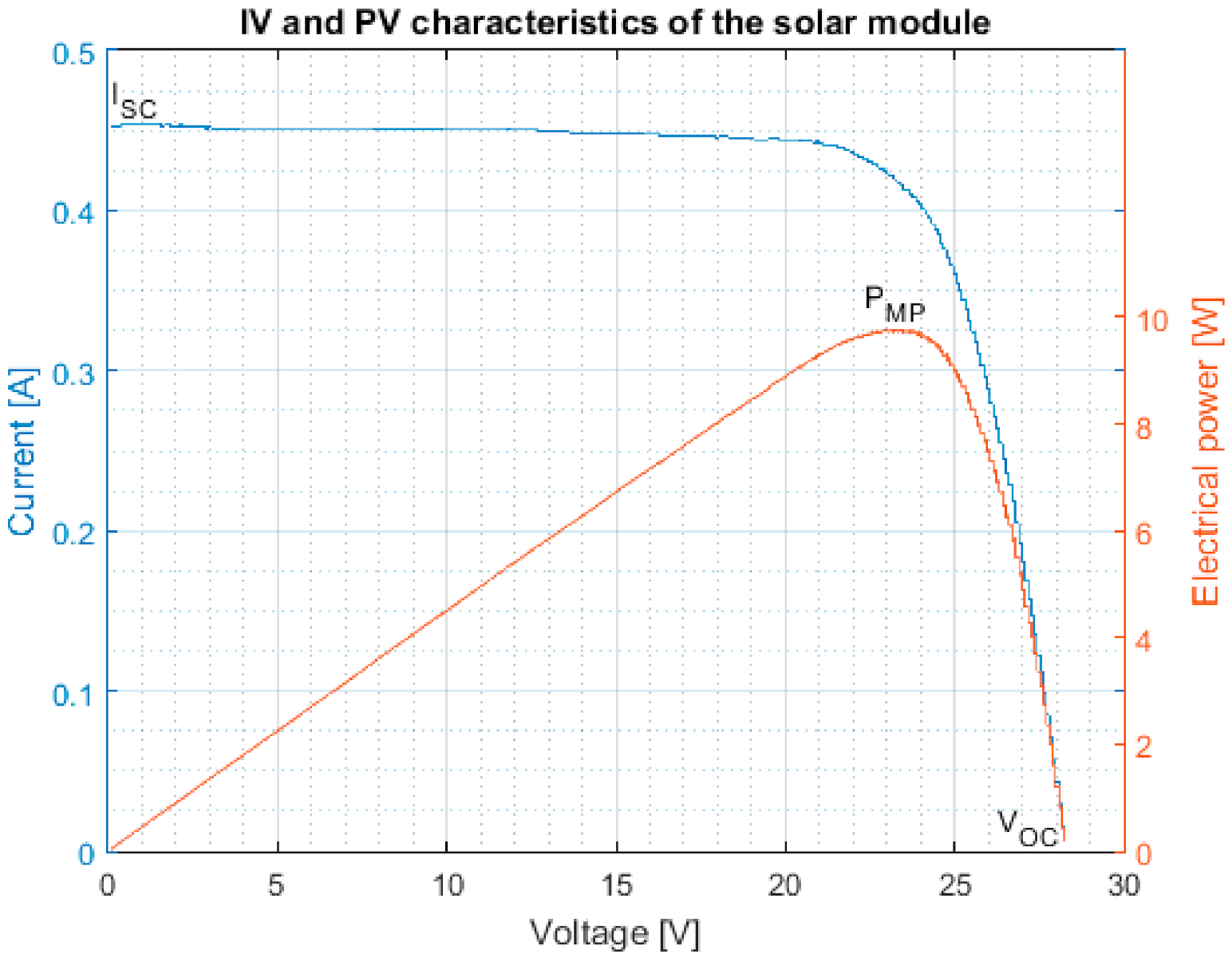
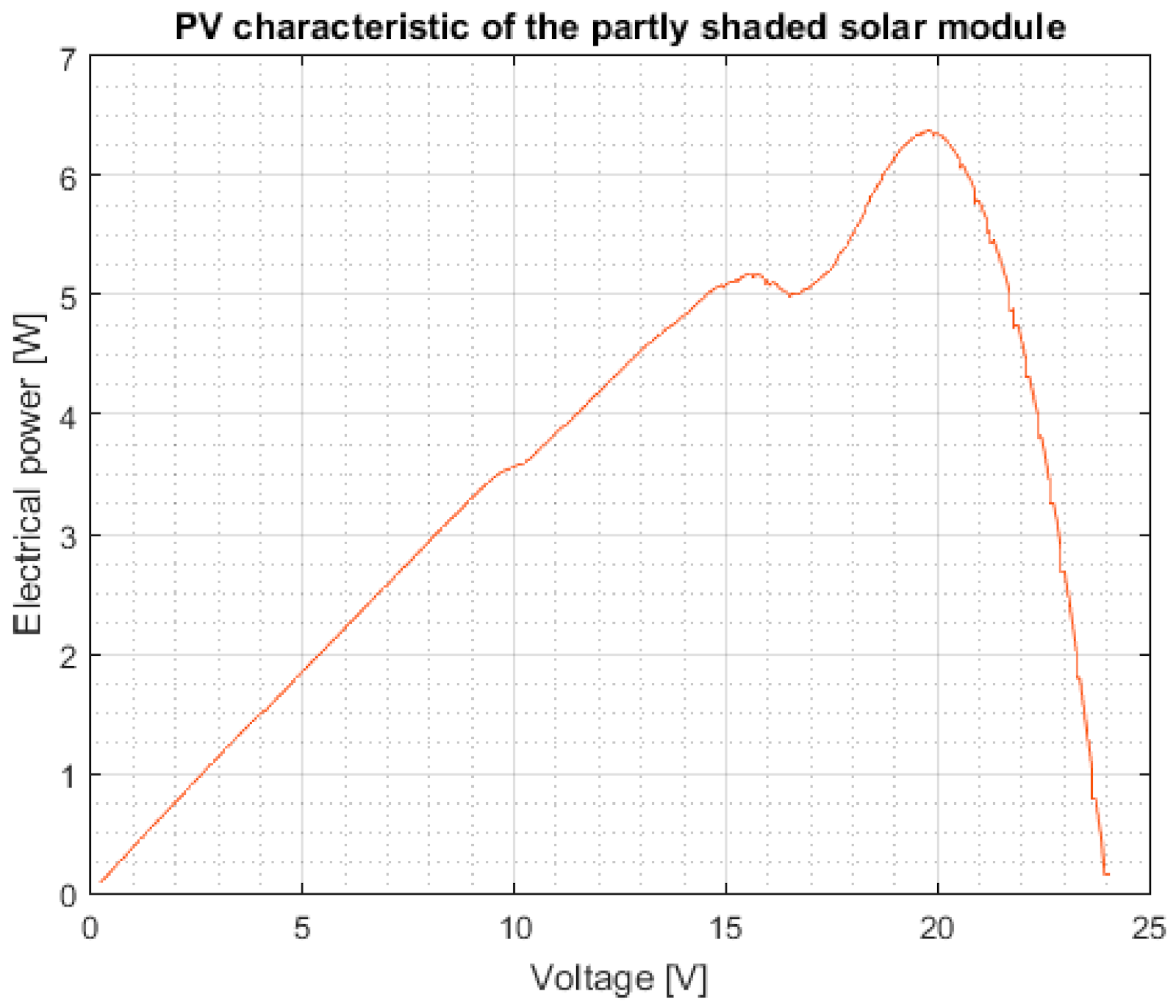
2.2. Solar Cell Characteristics and Maximum Power Point Tracking
3. Methods and Materials
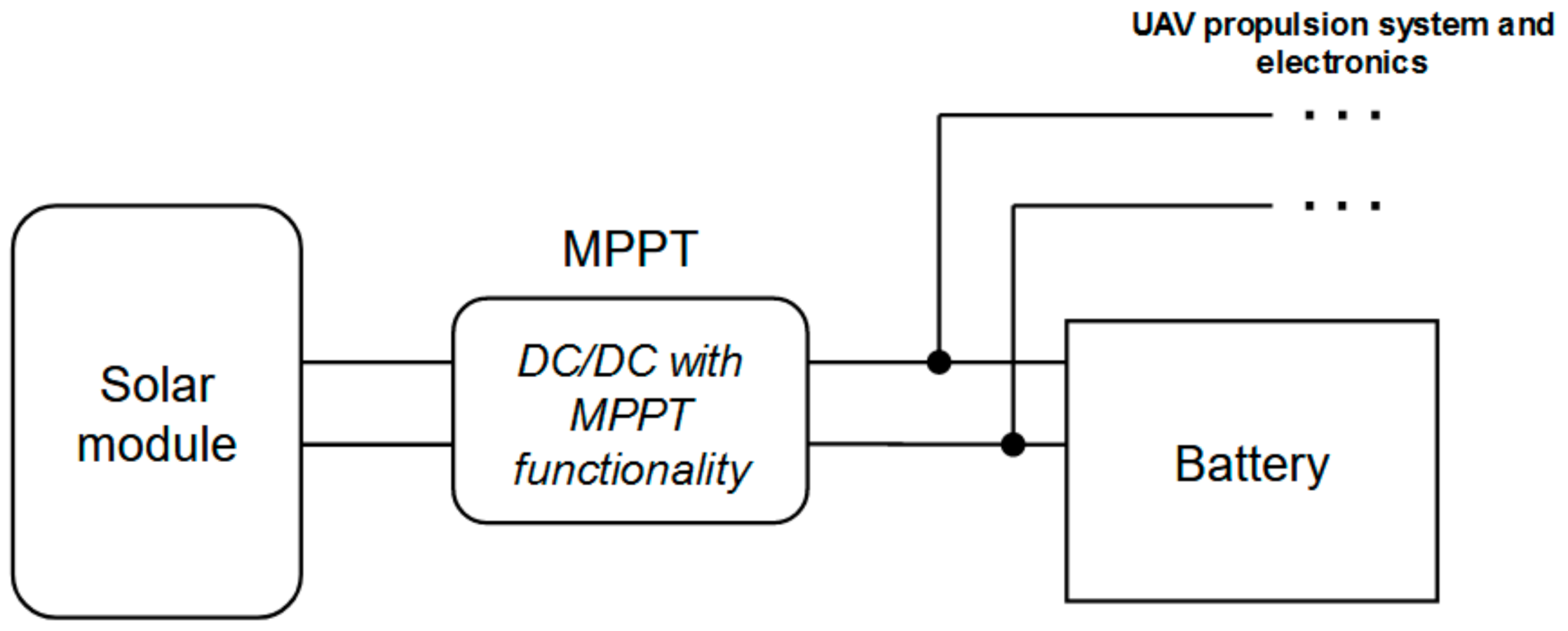
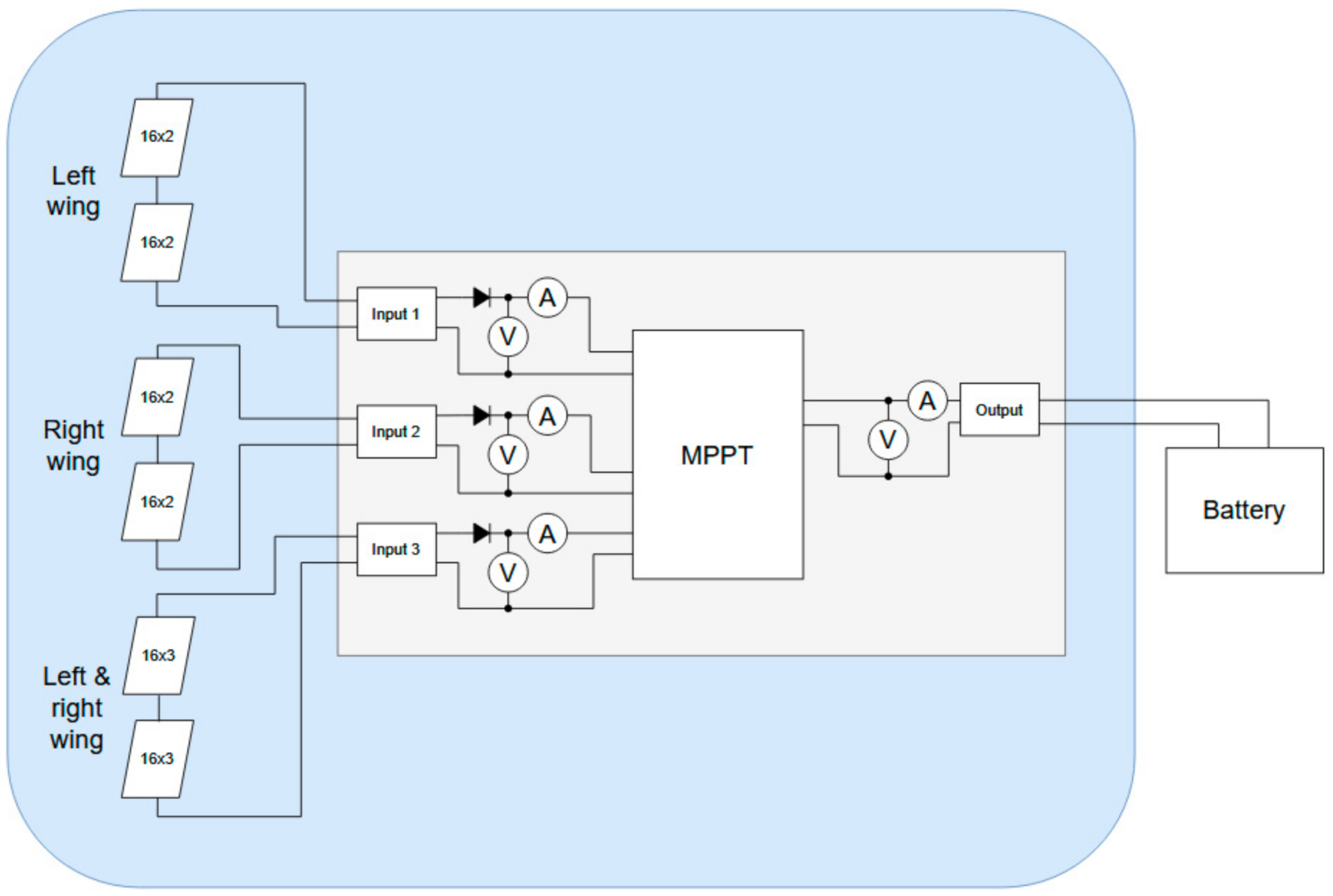
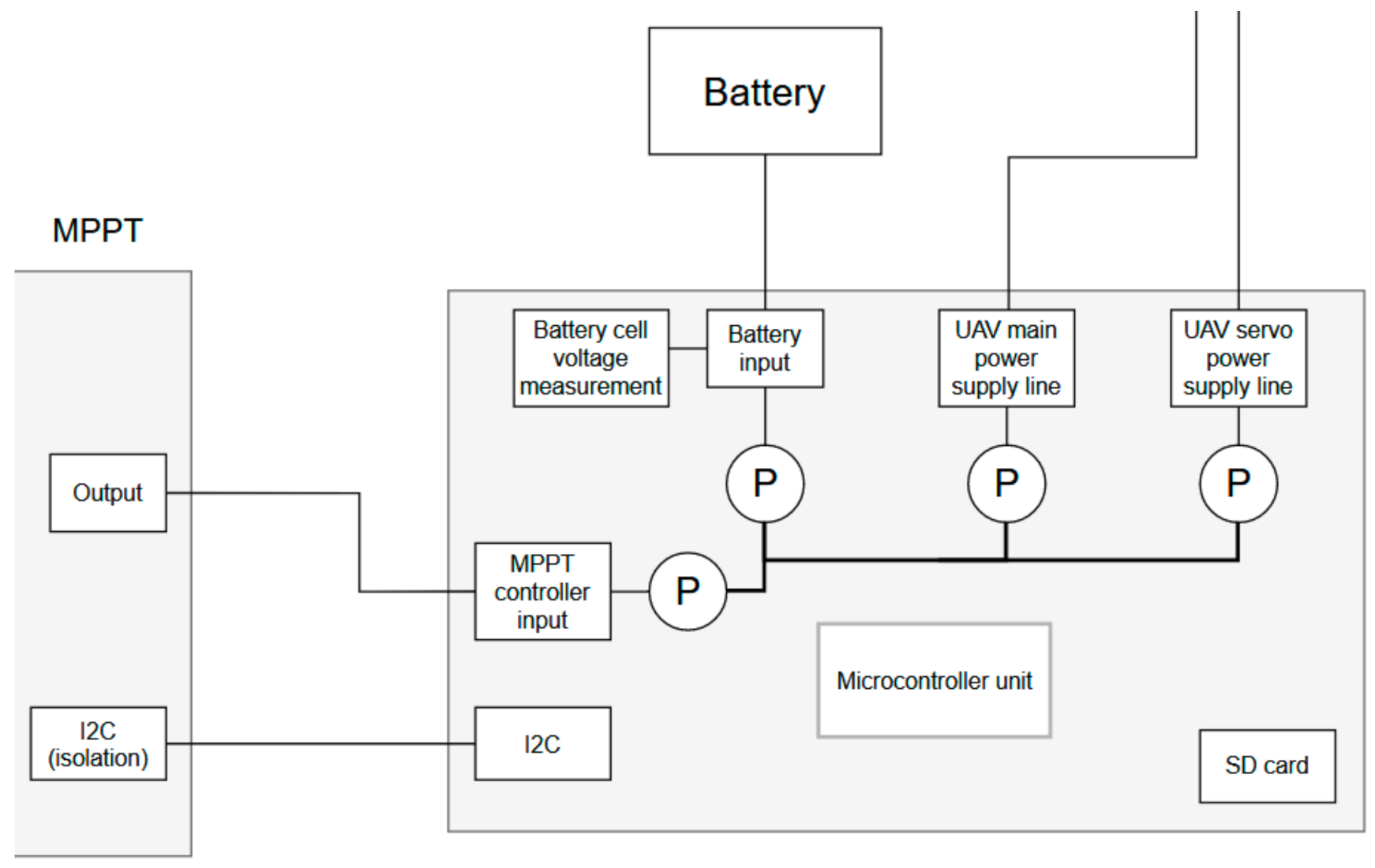
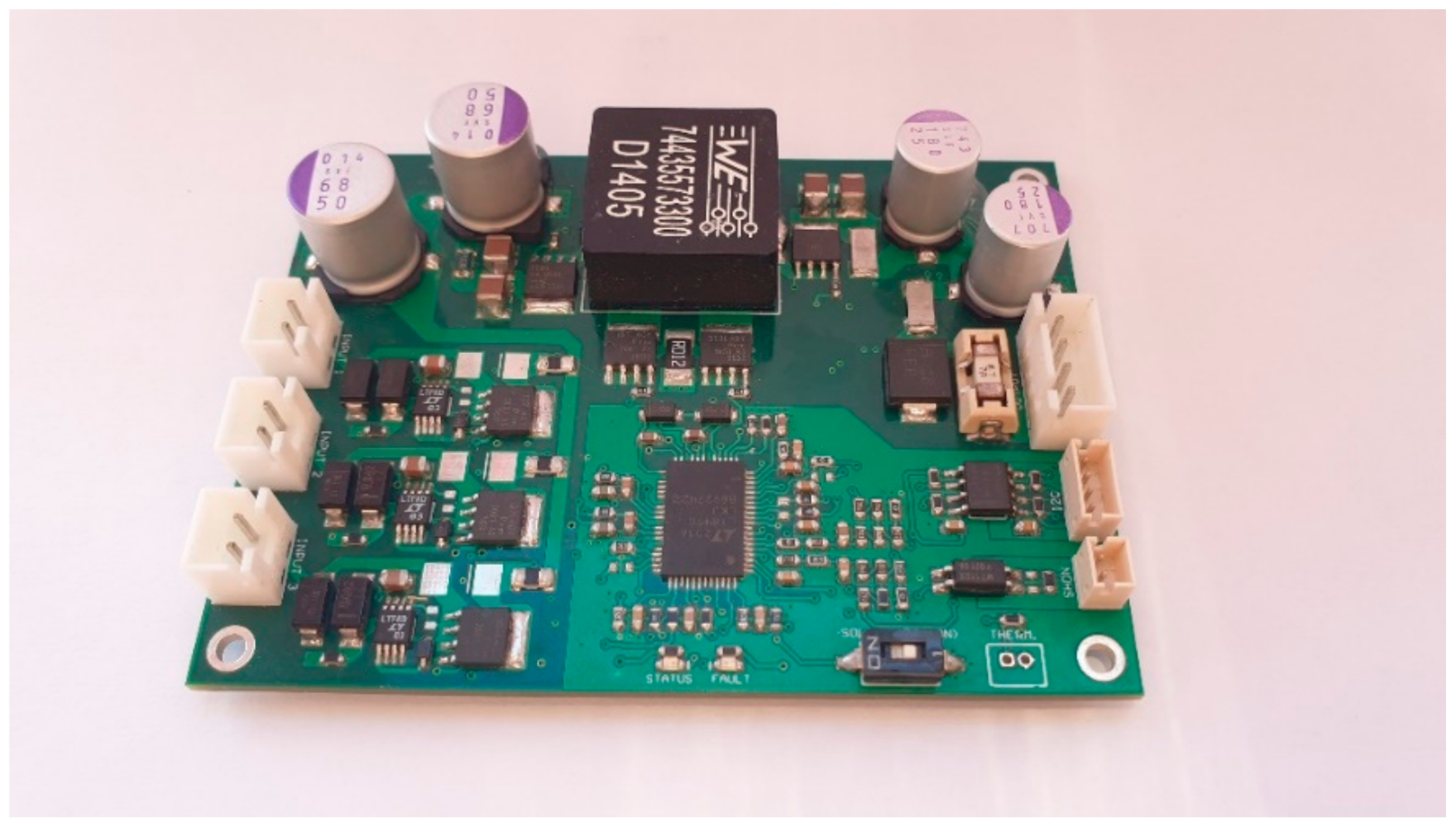
3.1. Solar Modules and MPPT
3.2. Electrical Energy Production Calculation
4. Results and Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- C-Astral Aerospace, Ltd. Company Web Page. Available online: www.c-astral.com (accessed on 22 September 2021).
- C-Astral Aerospace, Ltd. Area Coverage Chart. Available online: http://www.c-astral.com/en/download/601 (accessed on 22 September 2021).
- C-Astral, Ltd. Image of Bramor ppX UAV. Available online: http://www.c-astral.com/media/cache/br/bramor-ppx-6f2036421abf52cbf9159d0ebb164f5b.jpeg (accessed on 22 September 2021).
- Data Sheet of Li-Ion Battery Cell Panasonic NCR18650B. Available online: https://www.batteryspace.com/prod-specs/NCR18650B.pdf (accessed on 23 September 2021).
- Sion Power Corporation. Company Web Page. Available online: https://sionpower.com (accessed on 23 September 2021).
- Kokam Co., Ltd. Company Web Page. Available online: https://kokam.com/?lang=en (accessed on 23 September 2021).
- Amicell—Amit Industries, Ltd. Company Web Page. Available online: https://www.amicell.co.il (accessed on 23 September 2021).
- OXIS Energy, Ltd. Company Web Page. Available online: https://oxisenergy.com (accessed on 23 September 2021).
- Energy Density of Gasoline. Available online: https://hypertextbook.com/facts/2003/ArthurGolnik.shtml (accessed on 24 September 2021).
- Fuel Cells. Available online: https://www.energy.gov/eere/fuelcells/fuel-cells (accessed on 24 September 2021).
- Empa Achieves New Flexible Solar Cell Record. Available online: https://worldindustrialreporter.com/empa-achieves-new-flexible-solar-cell-record (accessed on 24 September 2021).
- MicroLink Devices, Inc. Photovoltaics. Available online: http://www.mldevices.com/index.php/product-services/photovoltaics (accessed on 24 September 2021).
- Genasun Lithium MPPT’s. Available online: https://genasun.eu/collections/genasun-lithium-mppts (accessed on 24 September 2021).
- Automakers Are Developing Solar-Powered Vehicles. Available online: https://www.assemblymag.com/articles/96333-automakers-are-developing-solar-powered-vehicles (accessed on 24 September 2021).
- eNow, Inc. Solar Technology for Trucks & Buses. Available online: https://www.enowenergy.com/solar-technology-overview-enow (accessed on 24 September 2021).
- Image of Flexible Solar Cell Module Made by Alta Devices, Inc. Company. Available online: https://mms.businesswire.com/media/20190423005283/en/717574/5/Alta_Devices_AnyLight_Solar_for_HALE_.jpg?download=1 (accessed on 24 September 2021).
- MicroLink Devices, Inc. Company Web Page. Available online: http://www.mldevices.com (accessed on 24 September 2021).
- Ascent Solar Technologies, Inc. Company Web Page. Available online: https://www.ascentsolar.com/index.html (accessed on 24 September 2021).
- Empa—Laboratory for Thin Films and Photovoltaics. Available online: https://www.empa.ch/web/s207 (accessed on 24 September 2021).
- SolAero Technolgies, Inc. Company Web Page. Available online: https://solaerotech.com (accessed on 24 September 2021).
- SolAero Technologies’ Solar Panel Powers NASA’s Mars Helicopter—Ingenuity. Available online: https://www.prnewswire.com/news-releases/solaero-technologies-solar-panel-powers-nasas-mars-helicopter---ingenuity-301271650.html (accessed on 24 September 2021).
- Alta Devices, Inc. Wikipedia Web Page. Available online: https://en.wikipedia.org/wiki/Alta_Devices (accessed on 24 September 2021).
- Alta Says 31.6% Solar Efficiency Record to Boost Drones. Available online: https://renewablesnow.com/news/alta-says-31-6-solar-efficiency-record-to-boost-drones-522791 (accessed on 24 September 2021).
- Fu, S.C.; Zhong, X.L.; Zhang, Y.; Lai, T.W.; Chan, K.C.; Lee, K.Y.; Chao, C.Y.H. Bio-inspired cooling technologies and the applications in buildings. Energy Build. 2020, 225, 110313. [Google Scholar] [CrossRef]
- Blackbody Radiation. Available online: https://www.e-education.psu.edu/astro801/content/l3_p5.html (accessed on 24 September 2021).
- How the Solar Cell Found the Spotlight. Available online: https://www.axpo.com/dk/en/about-us/magazine.detail.html/magazine/renewable-energy/how-the-solar-cell-found-the-spotlight.html (accessed on 24 September 2021).
- Rashid, M.H. Power Electronics Handbook, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2018; p. 735. [Google Scholar]
- Shannan, N.M.A.A.; Yahaya, N.Z.; Singh, B. Single-diode model and two-diode model of PV modules: A comparison. In Proceedings of the 2013 IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 29 November–1 December 2013; pp. 210–214. [Google Scholar] [CrossRef]
- Letcher, T.M. Future Energy: Improved, Sustainable and Clean Options for Our Planet, 2nd ed.; Elsevier: London, UK, 2014; pp. 388–389. [Google Scholar]
- IV Curve. Available online: https://www.pveducation.org/pvcdrom/solar-cell-operation/iv-curve (accessed on 25 September 2021).
- Vieira, R.G.; de Araújo, F.M.U.; Dhimish, M.; Guerra, M.I.S. A Comprehensive Review on Bypass Diode Application on Photovoltaic Modules. Energies 2020, 13, 2472. [Google Scholar] [CrossRef]
- Baba, A.O.; Liu, G.; Chen, X. Classification and Evaluation Review of Maximum Power Point Tracking Methods. Sustain. Futures 2020, 2, 100020. [Google Scholar] [CrossRef]
- Koutroulis, E.; Kalaitzakis, K.; Voulgaris, N.C. Development of a microcontroller-based, photovoltaic maximum power point tracking control system. IEEE Trans. Power Electron. 2001, 16, 46–54. [Google Scholar] [CrossRef] [Green Version]
- Practical Guide to Implementing Solar Panel MPPT Algorithms. Available online: http://www.microchip.com/wwwAppNotes/AppNotes.aspx?appnote=en561417 (accessed on 26 September 2021).
- El-Khozondar, H.J.; El-Khozondar, R.J.; Matter, K.; Suntio, T. A review study of photovoltaic array maximum power tracking algorithms. Renew. Wind. Water Sol. 2016, 3, 3. [Google Scholar] [CrossRef] [Green Version]
- Esram, T.; Chapman, P.L. Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef] [Green Version]
- Pallavee Bhatnagar, A.; Nema, B.R.K. Conventional and global maximum power point tracking techniques in photovoltaic applications: A review. J. Renew. Sustain. Energy 2013, 5, 032701. [Google Scholar] [CrossRef]
- Jain, A.; Jain, C.; Singh, B.; Al-Haddad, K.; Chandra, A. A dual tangent based algorithm for maximum power point tracking of solar PV systems. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 601–606. [Google Scholar] [CrossRef]
- Sharma, R.S.; Katti, P.K. Perturb & observation MPPT algorithm for solar photovoltaic system. In Proceedings of the 2017 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Kollam, India, 20–21 April 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Belkaid, A.; Colak, I.; Isik, O. Photovoltaic maximum power point tracking under fast varying of solar radiation. Appl. Energy 2016, 179, 523–530. [Google Scholar] [CrossRef]
- Al-Diab, A.; Sourkounis, C. Variable step size P&O MPPT algorithm for PV systems. In Proceedings of the 2010 12th International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 20–22 May 2010; pp. 1097–1102. [Google Scholar] [CrossRef]
- Tang, L.; Xu, W.; Mu, C. Analysis for step-size optimisation on MPPT algorithm for photovoltaic systems. IET Power Electron. 2017, 10, 1647–1654. [Google Scholar] [CrossRef]
- Dandoussou, A.; Kamta, M.; Bitjoka, L.; Wira, P.; Kuitché, A. Comparative study of the reliability of MPPT algorithms for the crystalline silicon photovoltaic modules in variable weather conditions. J. Electr. Syst. Inf. Technol. 2017, 4, 213–224. [Google Scholar] [CrossRef]
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Shirmohammadi, R. Considerable parameters of using PV cells for solar-powered aircrafts. Renew. Sustain. Energy Rev. 2013, 22, 81–91. [Google Scholar] [CrossRef]
- Serrano-Guerrero, X.; González-Romero, J.; Cárdenas-Carangui, X.; Escrivá-Escrivá, G. Improved variable step size P&O MPPT algorithm for PV systems. In Proceedings of the 2016 51st International Universities Power Engineering Conference (UPEC), Coimbra, Portugal, 6–9 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Vivek, P.; Ayshwarya, R.; Amali, S.J.; Sree, A.S.N. A novel approach on MPPT algorithm for solar panel using buck boost converter. In Proceedings of the 2016 International Conference on Energy Efficient Technologies for Sustainability (ICEETS), Nagercoil, India, 7–8 April 2016; pp. 396–399. [Google Scholar] [CrossRef]
- Loukriz, A.; Haddadi, M.; Messalti, S. Simulation and experimental design of a new advanced variable step size Incremental Conductance MPPT algorithm for PV systems. ISA Trans. 2016, 62, 30–38. [Google Scholar] [CrossRef] [PubMed]
- European Standard EN-50530:2011; CENELEC: Brussels, Belgium, 2011.
- Morton, S.; D’Sa, R.; Papanikolopoulos, N. Solar powered UAV: Design and experiments. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2460–2466. [Google Scholar] [CrossRef]
- Sudha; Patange, S.S.R.; Raja, S.; Aravindu, B.; Raghavendura, L.; Devi, M.S. Experimental studies for enhancing endurance of unmanned air vehicles. In Proceedings of the 2017 International Conference on Electrical, Electronics, Communication, Computer, and Optimization Techniques (ICEECCOT), Mysuru, India, 15–16 December 2017; pp. 216–219. [Google Scholar] [CrossRef]
- Noth, A. Design of Solar Powered Airplanes for Continious Flight. Ph.D. Thesis, ETH Zürich, Zürich, Switzerland, September 2008. [Google Scholar]
- Data Sheet of LTC4359. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/ltc4359.pdf (accessed on 27 September 2021).
- Data Sheet of INA233. Available online: https://www.ti.com/document-viewer/INA233/datasheet (accessed on 27 September 2021).
- Data Sheet of LT8490. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/8490fa.pdf (accessed on 27 September 2021).
- Data Sheet of LT8705. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/8705ff.pdf (accessed on 27 September 2021).
- Design Trade-Offs for Switch-Mode Battery Chargers. Available online: http://www.ti.com/lit/ml/slyp089/slyp089.pdf (accessed on 27 September 2021).
- Matlab, Mathworks. Available online: https://www.mathworks.com/products/matlab.html (accessed on 27 September 2021).
- Tait-Bryan Rotations. Available online: https://www.airports-worldwide.com/articles/article0702.php (accessed on 27 September 2021).
- Local Tangent Plane Coordinates. Available online: https://en.wikipedia.org/wiki/Local_tangent_plane_coordinates (accessed on 27 September 2021).
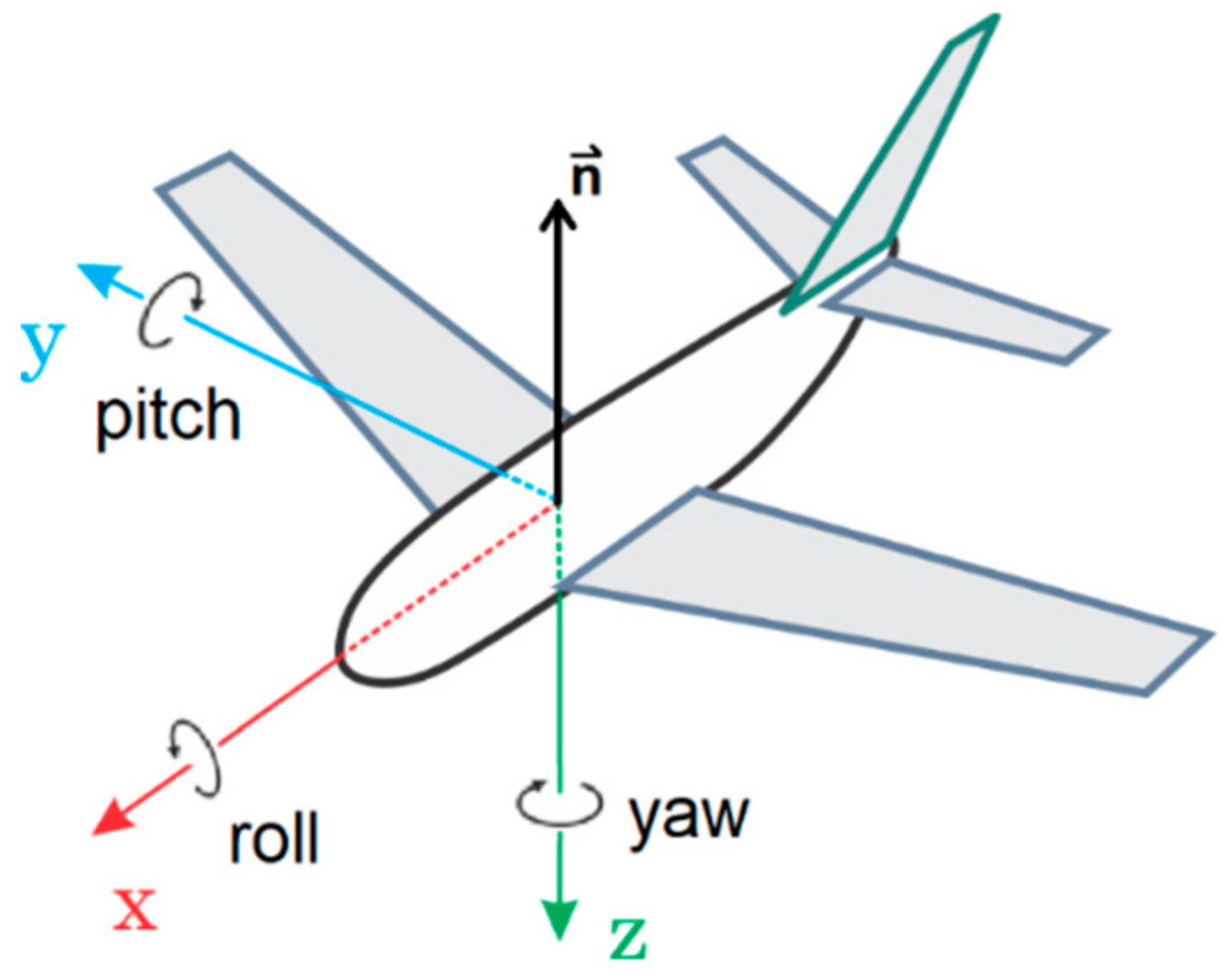
- UAV Coordinate System Orientation. Available online: https://docs.px4.io/master/assets/img/frame_heading.f02fbdcf.png (accessed on 28 September 2021).
- Intertial Measurement Unit (IMU). Available online: https://roboticsclubiitk.github.io/2017/12/21/Beginners-Guide-to-IMU.html (accessed on 28 September 2021).
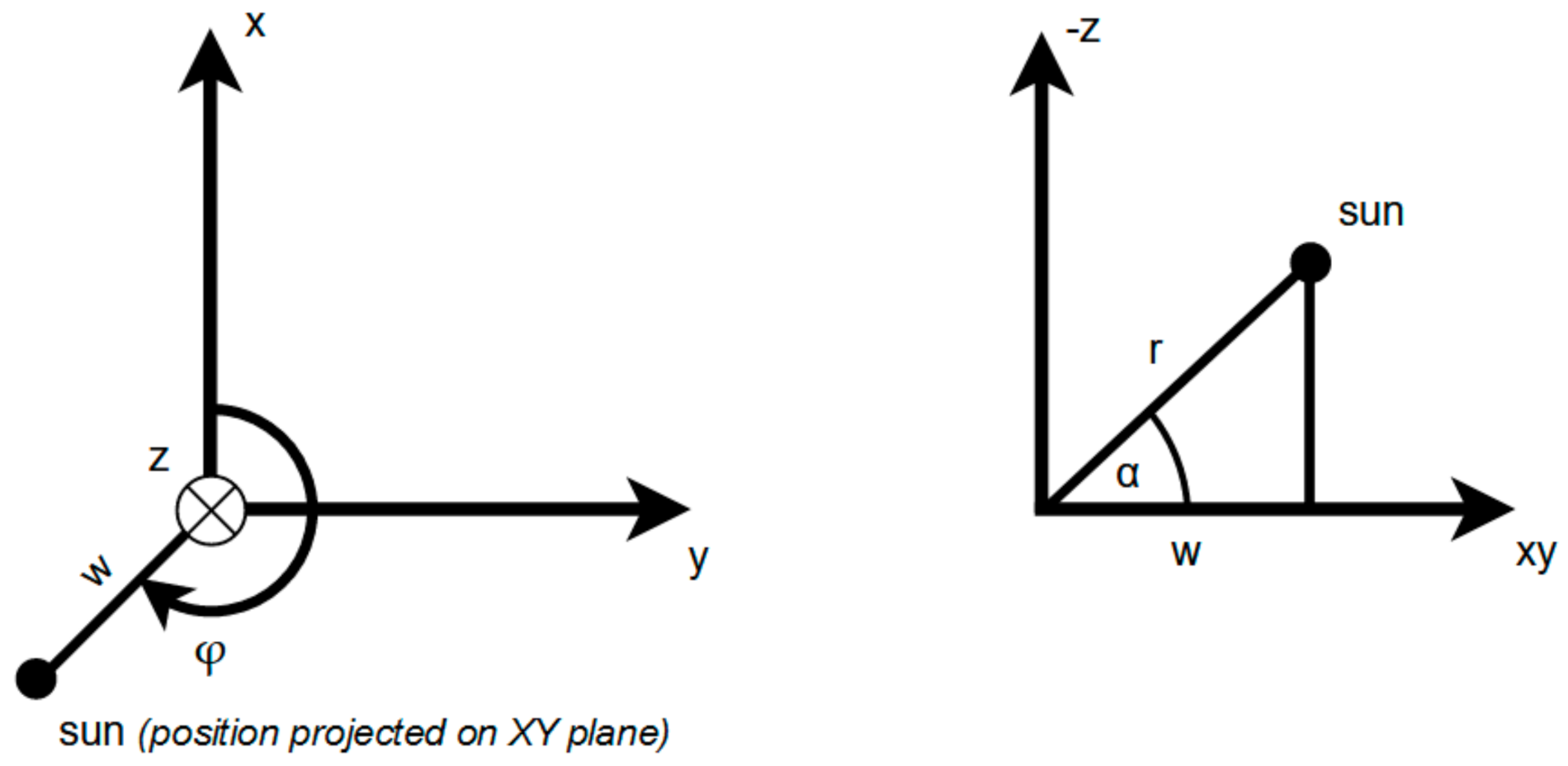
- The Sun’s Position. Available online: https://www.pveducation.org/pvcdrom/properties-of-sunlight/the-suns-position (accessed on 28 September 2021).
- Horizontal Coordinate System. Available online: https://www.timeanddate.com/astronomy/horizontal-coordinate-system.html (accessed on 28 September 2021).
- Rotation and Rotation Matrices. Available online: https://journals.iucr.org/d/issues/2001/10/00/ba5006 (accessed on 28 September 2021).
- The Difference between Horizontal and Tilted Global Solar Irradiance. Available online: https://www.kippzonen.com/News/408/The-Difference-between-Horizontal-and-Tilted-Global-Solar-Irradiance#.YVyJ7X2xWUl (accessed on 29 September 2021).
- POA Sky Diffuse. Available online: https://pvpmc.sandia.gov/modeling-steps/1-weather-design-inputs/plane-of-array-poa-irradiance/calculating-poa-irradiance/poa-sky-diffuse (accessed on 30 September 2021).
- ARSO, Slovenian Environmental Agency. Available online: http://meteo.arso.gov.si/met/en/app/webmet (accessed on 30 September 2021).
- Avy Completes Successful Test Flight with First Dutch Solar Drone. Available online: https://avy.eu/stories/press-release-avy-completes-successful-test-flight-with-first-dutch-solar-drone/ (accessed on 9 November 2021).
- Silent Falcon™ Small Unmanned Aircraft System. Available online: https://www.homelandsecurity-technology.com/projects/silent-falcon-small-unmanned-aircraft-system/ (accessed on 9 November 2021).
- AtlantikSolar. Available online: http://www.atlantiksolar.ethz.ch/ (accessed on 9 November 2021).
- Airbus Zephyr. Available online: https://en.wikipedia.org/wiki/Airbus_Zephyr (accessed on 9 November 2021).
- Solar Impulse. Available online: https://en.wikipedia.org/wiki/Solar_Impulse (accessed on 9 November 2021).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chain Type | Number of Solar Cells Connected in Series/Parallel | Open-Circuit Voltage VOC(V) | Short-Circuit Current ISC (A) | Voltage at Maximum Power VMP (V) | Current at Maximum Power IMP (A) | Maximum Power PMP (W) |
|---|---|---|---|---|---|---|
| A | 32/2 | 36.06 2/35.20 1/33.19 3 | 0.45 4/0.46 1/0.47 5 | 31.58 2/30.72 1/28.71 3 | 0.43 4/0.44 1/0.45 5 | 13.72 6/13.52 1/13.00 7 |
| B | 32/2 | 36.06 2/35.20 1/33.19 3 | 0.45 4/0.46 1/0.47 5 | 31.58 2/30.72 1/28.71 3 | 0.43 4/0.44 1/0.45 5 | 13.72 6/13.52 1/13.00 7 |
| C | 32/3 | 36.06 2/35.20 1/33.19 3 | 0.68 4/0.69 1/0.71 5 | 31.58 2/30.72 1/28.71 3 | 0.65 4/0.66 1/0.68 5 | 20.58 6/20.28 1/19.51 7 |
| Flight Number | Date of Flight | Airborne Time 1 (s) | Total Electrical Energy at the Input of MPPT 2 (Wh) | Electrical Energy at the Output of MPPT 3 (Wh) | MPPT Energy Efficiency 4 (%) | Extended Endurance 5 (%) |
|---|---|---|---|---|---|---|
| 1 | 20 August 2021 | 2979 | 16.95 | 16.36 | 96.50 | 21.25 |
| 2 | 27 August 2021 | 1938 | 10.91 | 10.51 | 96.27 | 17.03 |
| 3 | 2 September 2021 | 4634 | 29.40 | 28.52 | 97.01 | 19.28 |
| 4 | 3 September 2021 | 8072 | 51.08 | 49.56 | 97.03 | 14.45 |
| 5 | 9 September 2021 | 3836 | 21.20 | 20.45 | 96.48 | 12.36 |
| Flight Number | Date of Flight | B Value 1 | B Value 2 |
|---|---|---|---|
| 1 | 20 August 2021 | 0.5913 | 0.5928 |
| 2 | 27 August 2021 | 0.5522 | 0.5523 |
| 3 | 2 September 2021 | 0.6367 | 0.6365 |
| 4 | 3 September 2021 | 0.6213 | 0.6210 |
| 5 | 9 September 2021 | 0.5658 | 0.5658 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hrovatin, D.; Žemva, A. Exploiting Solar Energy during an Aerial Mapping Mission on a Lightweight UAV. Electronics 2021, 10, 2876. https://doi.org/10.3390/electronics10222876
Hrovatin D, Žemva A. Exploiting Solar Energy during an Aerial Mapping Mission on a Lightweight UAV. Electronics. 2021; 10(22):2876. https://doi.org/10.3390/electronics10222876
Chicago/Turabian StyleHrovatin, Dejan, and Andrej Žemva. 2021. "Exploiting Solar Energy during an Aerial Mapping Mission on a Lightweight UAV" Electronics 10, no. 22: 2876. https://doi.org/10.3390/electronics10222876