
Global Optimal Stabilization of MT-HVDC Systems: Inverse Optimal Control Approach

 ,
,  , ,
, ,  and
and 
Abstract
:1. Introduction
1.1. General Context
1.2. Motivation
1.3. Review of the State-of-the-Art
1.4. Contributions and Scope
- ✓
- The application of a robust control technique named inverse optimal control to MT-HVDC systems that ensures asymptotically stability properties in the sense of Lyapunov for closed-loop operation, and optimality properties with respect to the reference operational point.
- ✓
- The proposition of a new hierarchical-based control design for MT-HVDC systems by combining a semidefinite programming model to solve the optimal power flow problem in the tertiary level and the IOC to ensure the asymptotic convergence of the voltage variables to their references in the primary-secondary control level.
1.5. Document Organization
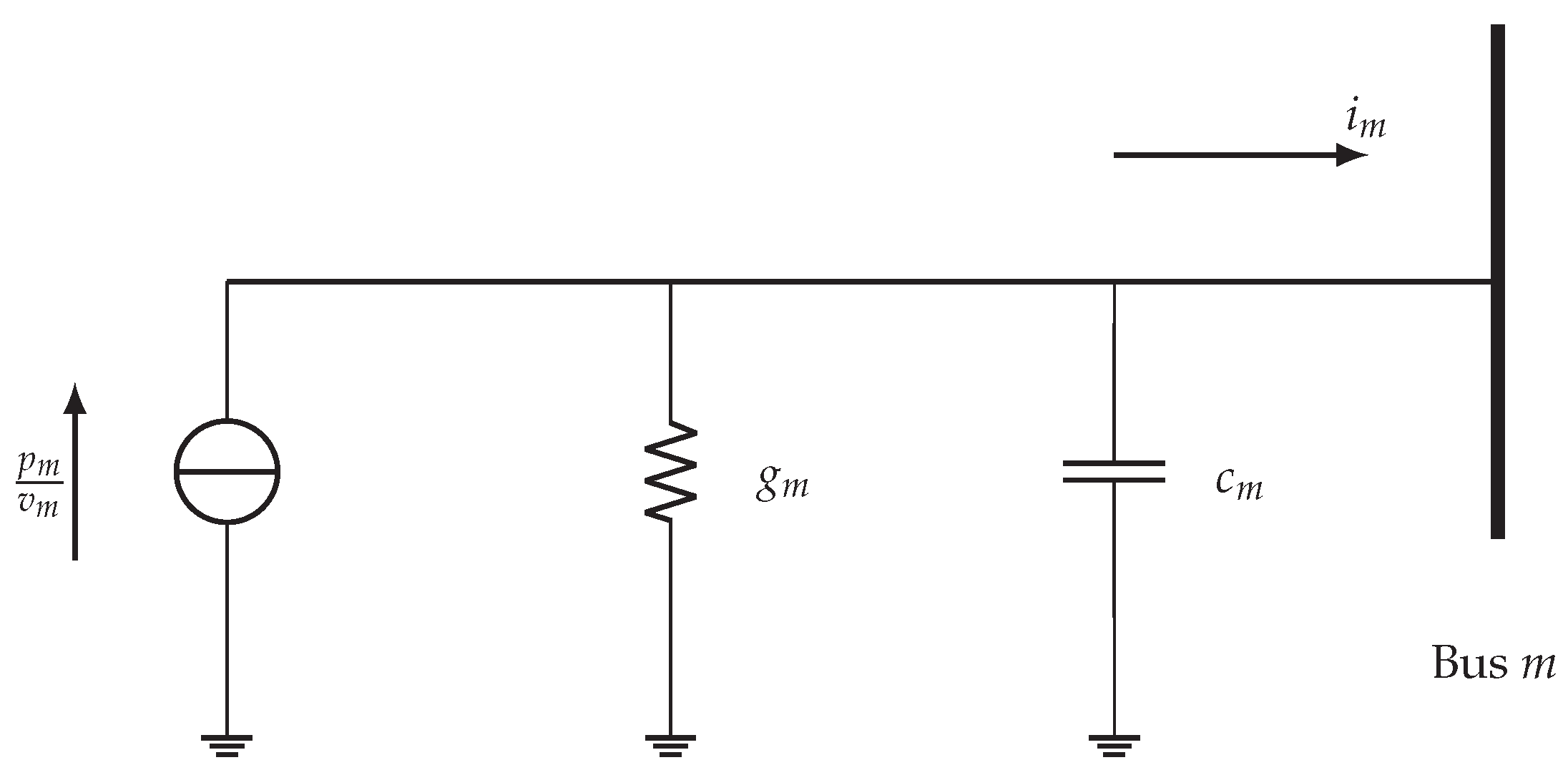
2. MT-HVDC Modeling
3. Global Stabilization via IOC
4. Application of the IOC to MT-HVDC Systems
5. Numerical Implementation
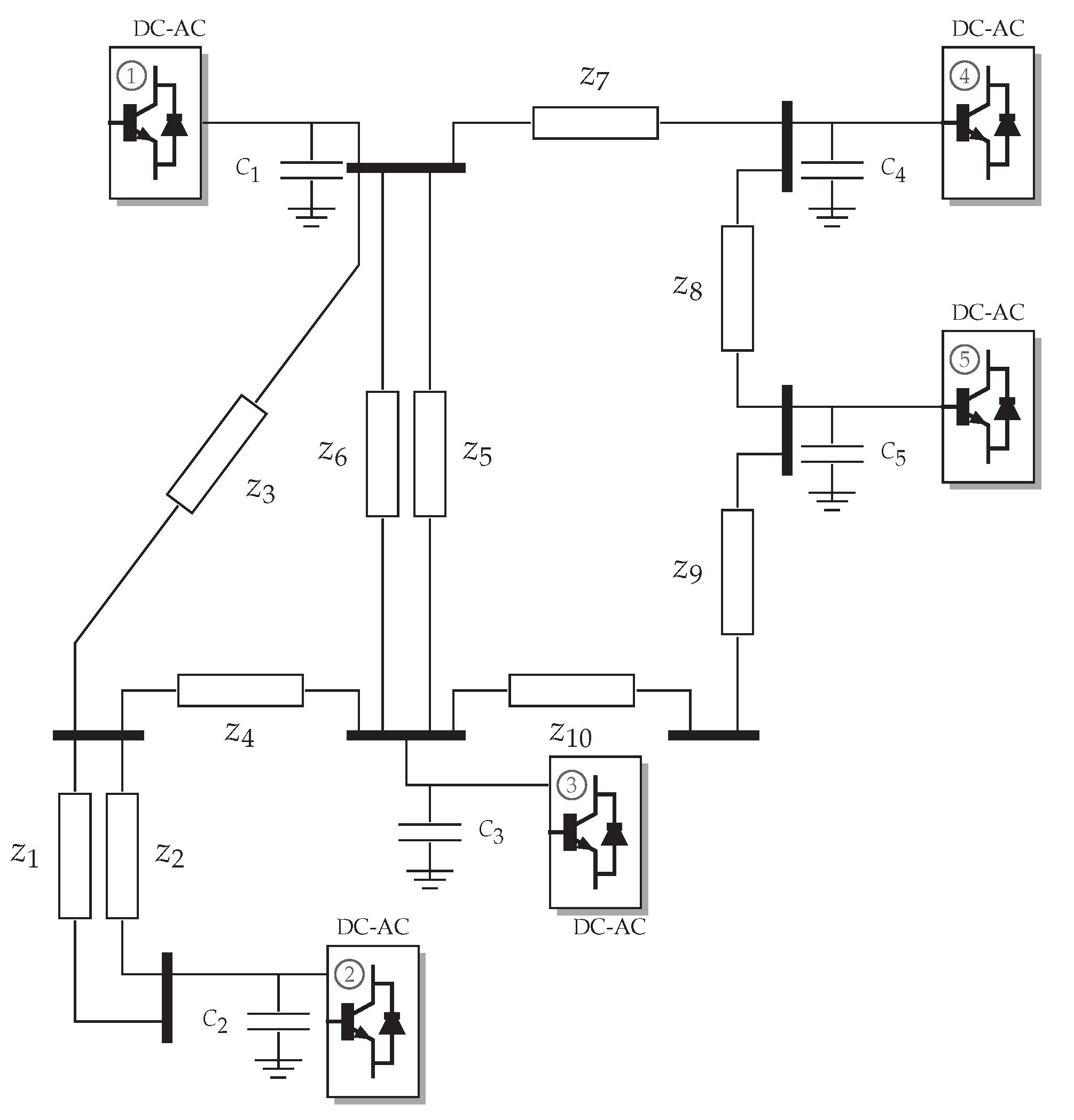
5.1. MT-HVDC System under Analysis and Simulation Cases
- ✓
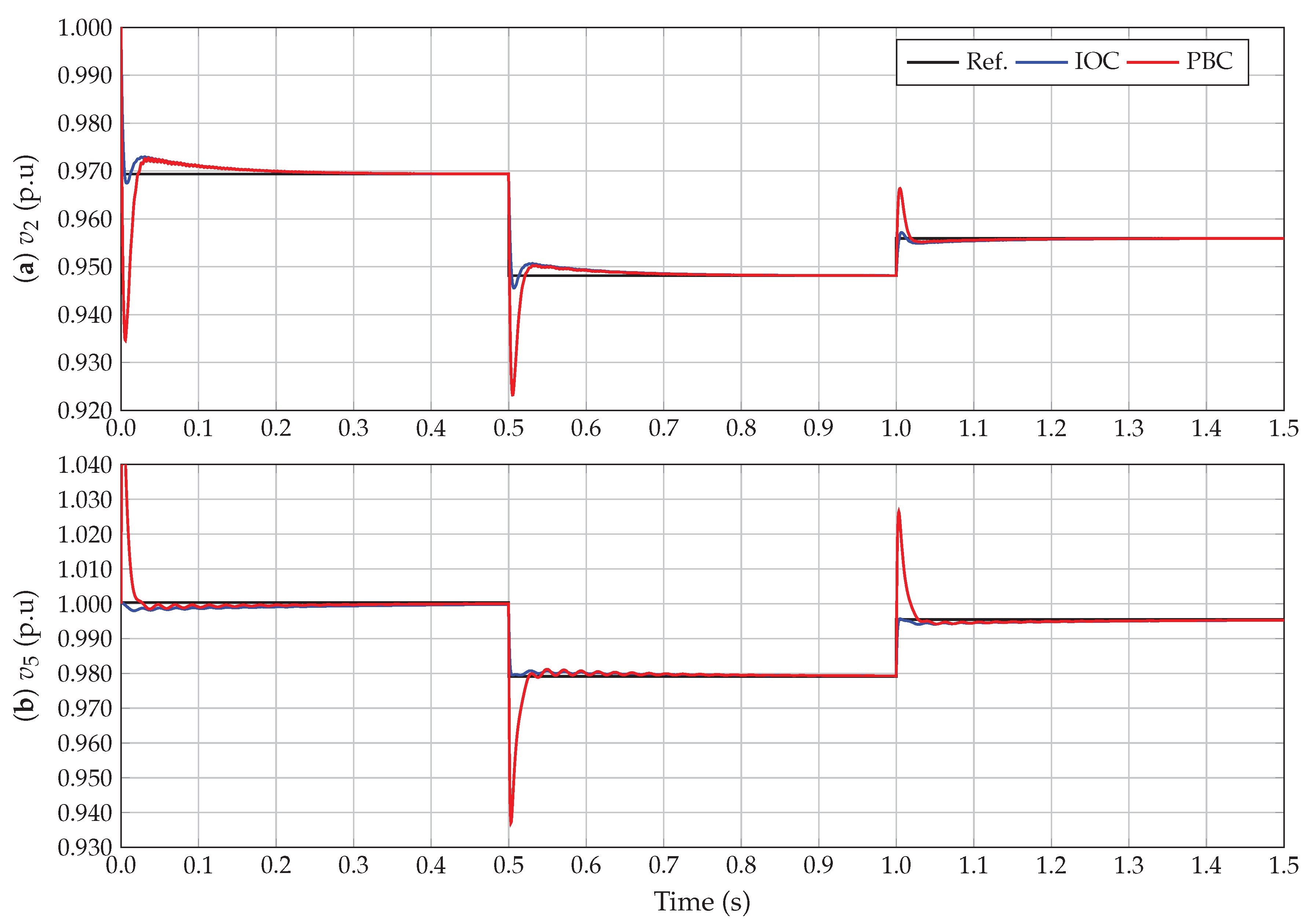
- The evaluation of the asymptotic convergence properties of the proposed IOC to reach the references provided by the tertiary control scheme, i.e., the solution of the optimal power flow problem through the SDP approximation. This evaluation is made by introducing three load variations in some constant power terminals that can be caused in the real operation by load changes or variations in the amount of power provided by renewable energy resources (see powers reported in Table 1).
- ✓
- The analysis of a temporary short-circuit event in one of the MT-HVDC system buses with a duration of about ms and a fault resistance of , which for a 400 kV can be considered to be a severe short-circuit event, since currents in the range of tens of thousands of amperes can appear in some areas of the network.
- ✓
- The disconnection of a transmission line due to the incorrect operation of the protective devices in its extremes, which produces a grid topology variation that implies the need for recalculating the reduced conductance matrix to update all the voltage references with the SDP model.
5.2. Voltage Control under Load Variations
5.3. Operation under a Short-Circuit Event
5.4. Topology Variation
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alassi, A.; Bañales, S.; Ellabban, O.; Adam, G.; MacIver, C. HVDC transmission: Technology review, market trends and future outlook. Renew. Sustain. Energy Rev. 2019, 112, 530–554. [Google Scholar] [CrossRef]
- Xiang, X.; Merlin, M.M.C.; Green, T.C. Cost analysis and comparison of HVAC, LFAC and HVDC for offshore wind power connection. In Proceedings of the 12th IET International Conference on AC and DC Power Transmission (ACDC 2016), Beijing, China, 28–29 May 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Elnady, A.; Adam, A. Decoupled State-Feedback Based Control Scheme for the Distributed Generation System. Electr. Power Components Syst. 2018, 46, 494–510. [Google Scholar] [CrossRef]
- Serra, F.M.; Angelo, C.H.D. Control of a battery charger for electric vehicles with unity power factor. Trans. Energy Syst. Eng. Appl. 2021, 2, 32–44. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Garces, A. Optimal Power Flow on DC Microgrids: A Quadratic Convex Approximation. IEEE Trans. Circuits Syst. II Exp. Briefs 2018, 66, 1018–1022. [Google Scholar] [CrossRef]
- Yang, W.; Xu, Z.; Han, Z. Co-ordinated hierarchical control strategy for multi-infeed HVDC systems. IEE Proc.-Gener. Transm. Distrib. 2002, 149, 242. [Google Scholar] [CrossRef]
- Fan, B.; Wang, K.; Zheng, Z.; Li, Y.; Wu, X. Hierarchical control system of modular multilevel converter used in high-voltage direct current transmission. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014. [Google Scholar] [CrossRef]
- Ramirez, D.A.; Garcés, A.; Mora-Flórez, J.J. A Convex Approximation for the Tertiary Control of Unbalanced Microgrids. Electr. Power Syst. Res. 2021, 199, 107423. [Google Scholar] [CrossRef]
- Egea-Alvarez, A.; Beerten, J.; Hertem, D.V.; Gomis-Bellmunt, O. Primary and secondary power control of multiterminal HVDC grids. In Proceedings of the 10th IET International Conference on AC and DC Power Transmission (ACDC 2012), Birmingham, UK, 4–6 December 2012. [Google Scholar] [CrossRef] [Green Version]
- Gil-González, W.; Montoya, O.D.; Garces, A. Direct power control for VSC-HVDC systems: An application of the global tracking passivity-based PI approach. Int. J. Electr. Power Energy Syst. 2019, 110, 588–597. [Google Scholar] [CrossRef]
- Simiyu, P.; Xin, A.; Wang, K.; Adwek, G.; Salman, S. Multiterminal Medium Voltage DC Distribution Network Hierarchical Control. Electronics 2020, 9, 506. [Google Scholar] [CrossRef] [Green Version]
- Zonetti, D.; Ortega, R.; Benchaib, A. A globally asymptotically stable decentralized PI controller for multi-terminal high-voltage DC transmission systems. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014. [Google Scholar] [CrossRef]
- Hannan, M.A.; Hussin, I.; Ker, P.J.; Hoque, M.M.; Lipu, M.S.H.; Hussain, A.; Rahman, M.S.A.; Faizal, C.W.M.; Blaabjerg, F. Advanced Control Strategies of VSC Based HVDC Transmission System: Issues and Potential Recommendations. IEEE Access 2018, 6, 78352–78369. [Google Scholar] [CrossRef]
- Simorgh, A.; Razminia, A.; Mobayen, S.; Baleanu, D. Optimal Control of a MIMO Bioreactor System Using Direct Approach. Int. J. Control. Autom. Syst. 2021, 19, 1159–1174. [Google Scholar] [CrossRef]
- Mobayen, S. Optimal LMI-based state feedback stabilizer for uncertain nonlinear systems with time-Varying uncertainties and disturbances. Complexity 2016, 21, 356–362. [Google Scholar] [CrossRef]
- Vega, C.; Alzate, R. Inverse optimal control on electric power conversion. In Proceedings of the 2014 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 5–7 November 2014. [Google Scholar] [CrossRef]
- Johnson, M.; Aghasadeghi, N.; Bretl, T. Inverse optimal control for deterministic continuous-time nonlinear systems. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013. [Google Scholar] [CrossRef]
- Raza, A.; Shakeel, A.; Altalbe, A.; OAlassafi, M.; Yasin, A.R. Impacts of MT-HVDC Systems on Enhancing the Power Transmission Capability. Appl. Sci. 2020, 10, 242. [Google Scholar] [CrossRef]
- Mohammadi, F.; Nazri, G.A.; Saif, M. An improved droop-based control strategy for MT-HVDC systems. Electronics 2020, 9, 87. [Google Scholar] [CrossRef] [Green Version]
- Gavriluta, C.; Candela, I.; Citro, C.; Luna, A.; Rodriguez, P. Design considerations for primary control in multi-terminal VSC-HVDC grids. Electr. Power Syst. Res. 2015, 122, 33–41. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Garces, A.; Serra, F.; Hernández, J.C. Stabilization of MT-HVDC grids via passivity-based control and convex optimization. Electr. Power Syst. Res. 2021, 196, 107273. [Google Scholar] [CrossRef]
- De Persis, C.; Weitenberg, E.R.; Dörfler, F. A power consensus algorithm for DC microgrids. Automatica 2018, 89, 364–375. [Google Scholar] [CrossRef] [Green Version]
- Tucci, M.; Meng, L.; Guerrero, J.M.; Ferrari-Trecate, G. Stable current sharing and voltage balancing in DC microgrids: A consensus-based secondary control layer. Automatica 2018, 95, 1–13. [Google Scholar] [CrossRef]
- Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S. General Active Global Stabilization of Multiloads DC-Power Networks. IEEE Trans. Power Electron. 2012, 27, 1788–1798. [Google Scholar] [CrossRef]
- Vafamand, N.; Khooban, M.H.; Dragičević, T.; Blaabjerg, F. Networked Fuzzy Predictive Control of Power Buffers for Dynamic Stabilization of DC Microgrids. IEEE Trans. Ind. Electron. 2019, 66, 1356–1362. [Google Scholar] [CrossRef]
- Kardan, M.A.; Asemani, M.H.; Khayatian, A.; Vafamand, N.; Khooban, M.H.; Dragičević, T.; Blaabjerg, F. Improved Stabilization of Nonlinear DC Microgrids: Cubature Kalman Filter Approach. IEEE Trans. Ind. Appl. 2018, 54, 5104–5112. [Google Scholar] [CrossRef] [Green Version]
- Mahmoudi, H.; Aleenejad, M.; Ahmadi, R. Modulated model predictive control of modular multilevel converters in VSC-HVDC systems. IEEE Trans. Power Del. 2017, 33, 2115–2124. [Google Scholar] [CrossRef]
- Garces, A.; Montoya, D.; Torres, R. Optimal power flow in multiterminal HVDC systems considering DC/DC converters. In Proceedings of the 2016 IEEE 25th International Symposium on Industrial Electronics (ISIE), Santa Clara, CA, USA, 8–10 June 2016. [Google Scholar] [CrossRef]
- Sepulchre, R.; Janković, M.; Kokotović, P.V. Constructive Nonlinear Control; Springer: London, UK, 1997. [Google Scholar] [CrossRef] [Green Version]
- Alanis, A.Y.; Lastire, E.A.; Arana-Daniel, N.; Lopez-Franco, C. Inverse Optimal Control with Speed Gradient for a Power Electric System Using a Neural Reduced Model. Math. Probl. Eng. 2014, 2014, 1–21. [Google Scholar] [CrossRef]
- Pérez, C.J.V.; Castaño, R.A. Inverse optimal control as an alternative to regulate a Boost DC-DC power converter. Rev. Tecnura 2015, 19, 65. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Liu, F.; Wang, Z.; Low, S.H.; Mei, S. Optimal Power Flow in Stand-Alone DC Microgrids. IEEE Trans. Power Syst. 2018, 33, 5496–5506. [Google Scholar] [CrossRef] [Green Version]
- Montoya, O.D.; Gil-González, W.; Garces, A. Sequential quadratic programming models for solving the OPF problem in DC grids. Electr. Power Syst. Res. 2019, 169, 18–23. [Google Scholar] [CrossRef]
- Gil-González, W.; Molina-Cabrera, A.; Montoya, O.D.; Grisales-Noreña, L.F. An MI-SDP Model for Optimal Location and Sizing of Distributed Generators in DC Grids That Guarantees the Global Optimum. Appl. Sci. 2020, 10, 7681. [Google Scholar] [CrossRef]
- Gil-González, W.; Montoya, O.D.; Holguín, E.; Garces, A.; Grisales-Noreña, L.F. Economic dispatch of energy storage systems in dc microgrids employing a semidefinite programming model. J. Energy Storage 2019, 21, 1–8. [Google Scholar] [CrossRef]
- Montoya, O.D. Numerical Approximation of the Maximum Power Consumption in DC-MGs with CPLs via an SDP Model. IEEE Trans. Circuits Syst. II Exp. Briefs 2018, 66, 642–646. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | T1 (MW) | T2 (MW) | T3 (MW) |
|---|---|---|---|
| 1 Slack | — | — | — |
| 2 CPL | 850 | 1500 | 1200 |
| 3 CPL | 1500 | 1400 | 2000 |
| 4 CPL | 1850 | 2350 | 1500 |
| 5 PV | 2550 | 500 | 1250 |
| GAMS-KNITRO | ||||
| Period [s] | (p.u) | (p.u) | (p.u) | (p.u) |
| T1 | 0.96940387 | 0.98277874 | 0.98917412 | 1.00054847 |
| T2 | 0.94812789 | 0.97359505 | 0.97524539 | 0.97910535 |
| T3 | 0.95587639 | 0.97489993 | 0.98858684 | 0.99519122 |
| CVX-MATLAB | ||||
| Period [s] | (p.u) | (p.u) | (p.u) | (p.u) |
| T1 | 0.96936016 | 0.98271970 | 0.98906506 | 1.00034174 |
| T2 | 0.94812784 | 0.97359505 | 0.97524544 | 0.97910548 |
| T3 | 0.95592569 | 0.97496718 | 0.98870912 | 0.99543415 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montoya, O.D.; Gil-González, W.; Serra, F.M.; De Angelo, C.H.; Hernández, J.C. Global Optimal Stabilization of MT-HVDC Systems: Inverse Optimal Control Approach. Electronics 2021, 10, 2819. https://doi.org/10.3390/electronics10222819
Montoya OD, Gil-González W, Serra FM, De Angelo CH, Hernández JC. Global Optimal Stabilization of MT-HVDC Systems: Inverse Optimal Control Approach. Electronics. 2021; 10(22):2819. https://doi.org/10.3390/electronics10222819
Chicago/Turabian StyleMontoya, Oscar Danilo, Walter Gil-González, Federico Martin Serra, Cristian Hernan De Angelo, and Jesus C. Hernández. 2021. "Global Optimal Stabilization of MT-HVDC Systems: Inverse Optimal Control Approach" Electronics 10, no. 22: 2819. https://doi.org/10.3390/electronics10222819