
Malware Detection Based on Graph Attention Networks for Intelligent Transportation Systems


Abstract
:1. Introduction
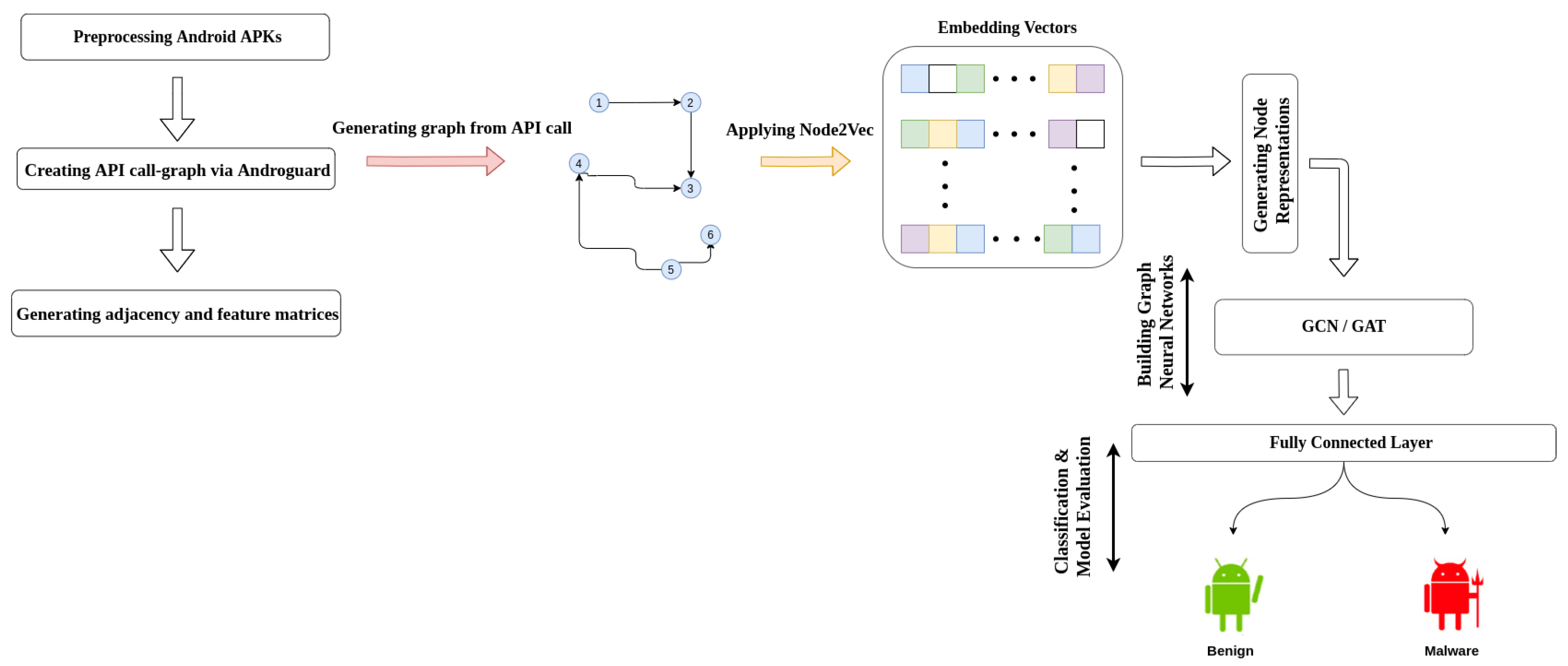
- This study integrated the Node2Vec with the GAN model, which obtains richer and adaptive node feature representations;
- The proposed model can be applied to detect malware in ITS, which has integrated mobile application interface.
2. Related Work
2.1. Machine Learning Techniques
2.2. Deep Learning-Based Techniques
2.3. Graph-Based Techniques
3. Methods
3.1. Graph-Based Classification Models
3.2. Node2Vec Embedding
3.3. Performance Evaluation Metrics
4. Proposed Framework and Properties
4.1. Framework
4.2. Framework Properties to Detect Malware for ITS
5. Experimental Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qi, L. Research on Intelligent Transportation System Technologies and Applications. In Proceedings of the Workshop on Power Electronics and Intelligent Transportation System, Guangzhou, China, 4–5 August 2008; pp. 529–531. [Google Scholar]
- Mokaddem, Y.; Jawab, F. Researches and applications of intelligent transportations systems in urban area: Systematic literature review. ARPN J. Eng. Appl. Sci. 2019, 14, 639–652. [Google Scholar]
- Harvey, J.; Kumar, S. A Survey of Intelligent Transportation Systems Security: Challenges and Solutions. In Proceedings of the 2020 IEEE 6th Intl Conference on Big Data Security on Cloud (BigDataSecurity), IEEE Intl Conference on High Performance and Smart Computing, (HPSC) and IEEE Intl Conference on Intelligent Data and Security (IDS), Baltimore, MD, USA, 25–27 May 2020; pp. 263–268. [Google Scholar]
- Hahn, D.; Munir, A.; Behzadan, V. Security and Privacy Issues in Intelligent Transportation Systems: Classification and Challenges. IEEE Intell. Transp. Syst. Mag. 2019, 13, 181–196. [Google Scholar] [CrossRef] [Green Version]
- Chumachenko, K. Machine Learning Methods for Malware Detection and Classification. Bachelor’s Thesis, Lahti University of Technology LUT, Lappeenranta, Finland, March 2017. [Google Scholar]
- Alkasassbeh, M.; Mohammed, S.; Alauthman, M.; Almomani, A. Feature Selection Using a Machine Learning to Classify a Malware; Springer: Cham, Switzerland, 2020; pp. 889–904. [Google Scholar]
- Mahajan, G.; Saini, B.; Anand, S. Malware Classification Using Machine Learning Algorithms and Tools. In Proceedings of the Second International Conference on Advanced Computational and Communication Paradigms, Gangtok, India, 25–28 February 2019; pp. 1–8. [Google Scholar]
- Park, H.; Piamrat, K.; Singh, K.; Chen, H. Data Analysis for Self-Driving Vehicles in Intelligent Transportation Systems. J. Adv. Transp. 2020, 2020, 9386148. [Google Scholar] [CrossRef]
- Hardy, W.; Chen, L.; Hou, S.; Ye, Y.; Li, X. DL 4 MD: A Deep Learning Framework for Intelligent Malware Detection. In Proceedings of the International Conference on Data Mining, Las Vegas, NV, USA, 25–28 July 2016. [Google Scholar]
- Sewak, M.; Sahay, S.; Rathore, H. An investigation of a deep learning based malware detection system. In Proceedings of the 13th International Conference on Availability, Reliability and Security (ARES 2018), New York, NY, USA, 27–30 August 2018. [Google Scholar]
- Zhu, D.; Jin, H.; Yang, Y.; Wu, D.; Chen, W. DeepFlow: Deep learning-based malware detection by mining Android application for abnormal usage of sensitive data. In Proceedings of the IEEE Symposium on Computers and Communications (ISCC), Heraklion, Crete, Greece, 3–6 July 2017; pp. 438–443. [Google Scholar]
- Saxe, J.; Berlin, K. Deep neural network based malware detection using two dimensional binary program features. In Proceedings of the 10th International Conference on Malicious and Unwanted Software (MALWARE), Fajardo, PR, USA, 20–22 October 2015; pp. 11–20. [Google Scholar]
- Naseer, M.; Rusdi, J.; Shanono, N.; Salam, S.; Muslim, Z.; Abu, N.; Abadi, I. Journal of Physics: Conference Series. In Proceedings of the International Conference of Science and Information Technology in Smart Administration (ICSINTeSA), Balikpapan Kota, Indonesia, 16–17 October 2019. [Google Scholar]
- Kipf, T.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. In Proceedings of the 5th International Conference on Learning Representations, ICLR 2017, Toulon, France, 24–26 April 2017. [Google Scholar]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Liò, P.; Bengio, Y. Graph Attention Networks. In Proceedings of the 6th International Conference on Learning Representations, ICLR 2018, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Oliveira, A.; Sassi, R. Behavioral Malware Detection Using Deep Graph Convolutional Neural Networks. TechRxiv, 2019; under review. [Google Scholar]
- Gao, H.; Cheng, S.; Zhang, W. GDroid: Android malware detection and classification with graph convolutional network. Comput. Secur. 2021, 106, 102264. [Google Scholar] [CrossRef]
- John, T.; Thomas, T.; Emmanuel, S. Graph Convolutional Networks for Android Malware Detection with System Call Graphs. In Proceedings of the Third ISEA Conference on Security and Privacy (ISEA-ISAP), Guwahati, India, 27 February–1 March 2020. [Google Scholar]
- Rieck, K.; Holz, T.; Willems, C.; Düssel, P.; Laskov, P. Learning and Classification of Malware Behavior. In Proceedings of the 5th International Conference on Detection of Intrusions and Malware, and Vulnerability Assessment DIMVA, Paris, France, 10–11 July 2008. [Google Scholar]
- Firdausi, I.; Lim, C.; Erwin, A.; Nugroho, A. Analysis of machine learning techniques used in behavior-based malware detection. In Proceedings of the International Conference on Advances in Computing, Control and Telecommunication Technologies, Jakarta, Indonesia, 2–3 December 2010. [Google Scholar]
- Sahs, J.; Khan, L. A machine learning approach to android malware detection. In Proceedings of the European Intelligence and Security Informatics Conference, Odense, Denmark, 22–24 August 2012. [Google Scholar]
- Rana, J.S.; Gudla, C.; Sung, A.H. Evaluating machine learning models for android malware detection: A comparison study. In Proceedings of the 2018 VII International Conference on Network, Communication and Computing, New York, NY, USA, 14–16 December 2018. [Google Scholar]
- Kan, Z.; Wang, H.; Xu, G.; Guo, Y.; Chen, X. Towards Light-Weight Deep Learning Based Malware Detection. In Proceedings of the IEEE 42nd Annual Computer Software and Applications Conference (COMPSAC), Tokyo, Japan, 23–27 July 2018. [Google Scholar]
- Alzaylaee, M.K.; Yerima, S.Y.; Sezer, S. DL-Droid: Deep Learning Based Android Malware Detection Using Real Devices. Comput. Secur. 2020, 89, 101663. [Google Scholar] [CrossRef]
- Aafer, Y.; Wenliang, D.; Yin, H. DroidAPIMiner: Mining API-Level Features for Robust Malware Detection in Android. In Proceedings of the International Conference on Security and Privacy in Communication Systems, Sydney, Australia, 25–28 September 2013; pp. 86–103. [Google Scholar]
- Yerima, S.Y.; Sezer, S. DroidFusion: A Novel Multilevel Classifier Fusion Approach for Android Malware Detection. IEEE Trans. Cybern. 2019, 49, 453–466. [Google Scholar] [CrossRef] [PubMed]
- Xu, P.; Eckert, C.; Zarras, A. Detecting and categorizing Android malware with graph neural networks. In Proceedings of the 36th Annual ACM Symposium on Applied Computing (SAC ’21), New York, NY, USA, 22–26 March 2021; pp. 409–412. [Google Scholar]
- Kipf, T.; Welling, M. Variational Graph Auto-Encoders. In Proceedings of the 30th International Conference on Neural Information Processing Systems, (NIPS’16), Barcelona, Spain, 5–10 December 2016. [Google Scholar]
- Goyal, P.; Ferrara, E. Graph embedding techniques, applications, and performance: A survey. Knowl.-Based Syst. 2018, 151, 78–94. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Philip, S. A comprehensive survey on graph neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4–24. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cavallari, S.; Zheng, V.; Cai, H.; Chang, K.; Cambria, E. Learning community embedding with community detection and node embedding on graphs. In Proceedings of the 2017 ACM on Conference on Information and Knowledge Management, Singapore, 6–10 November 2017; pp. 377–386. [Google Scholar]
- Qin, A.; Shang, Z.; Tian, J.; Wang, Y.; Zhang, T.; Tang, Y. Spectral–spatial graph convolutional networks for semisupervised hyperspectral image classification. IEEE Geosci. Remote Sens. Lett. 2018, 16, 241–245. [Google Scholar] [CrossRef]
- Zhang, S.; Tong, H.; Xu, J.; Maciejewski, R. Graph convolutional networks: A comprehensive review. Comput. Soc. Netw. 2019, 6, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Grover, A.; Leskovec, J. node2vec: Scalable feature learning for networks. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 855–864. [Google Scholar]
- De Winter, S.; Decuypere, T.; Mitrović, S.; Baesens, B.; De Weerdt, J. Combining temporal aspects of dynamic networks with Node2Vec for a more efficient dynamic link prediction. In Proceedings of the 2018 IEEE/ACM International Conference on Advances in Social Networks Analysis and Mining (ASONAM), Barcelona, Spain, 28–31 August 2018; pp. 1234–1241. [Google Scholar]
- Grohe, M. word2vec, node2vec, graph2vec, x2vec: Towards a theory of vector embeddings of structured data. In Proceedings of the 39th ACM SIGMOD-SIGACT-SIGAI Symposium on Principles of Database Systems, Portland, OR, USA, 14–19 June 2020; pp. 1–16. [Google Scholar]
- Gunduz, H. An efficient stock market prediction model using hybrid feature reduction method based on variational autoencoders and recursive feature elimination. Financ. Innov. 2021, 7, 1–24. [Google Scholar] [CrossRef]
- Gunduz, H. An efficient dimensionality reduction method using filter-based feature selection and variational autoencoders on Parkinson’s disease classification. Biomed. Signal Process. Control. 2021, 66, 102452. [Google Scholar] [CrossRef]
- Mahdavifar, S.; Kadir, A.; Fatemi, R.; Alhadidi, D.; Ghorbani, A. Dynamic Android Malware Category Classification using Semi-Supervised Deep Learning. In Proceedings of the 2020 IEEE Intl Conf on Dependable, Autonomic and Secure Computing, Intl Conf on Pervasive Intelligence and Computing, Intl Conf on Cloud and Big Data Computing, Intl Conf on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech), Calgary, AB, Canada, 17–22 August 2020; pp. 515–522. [Google Scholar]
- Kadir, A.; Stakhanova, N.; Ghorbani, A. Android botnets: What urls are telling us. In International Conference on Network and System Security; Springer: Cham, Switzerland, 2015; pp. 78–91. [Google Scholar]
- Park, S.; Choi, J. Malware detection in self-driving vehicles using machine learning algorithms. J. Adv. Transp. 2020, 14, 3035741. [Google Scholar] [CrossRef] [Green Version]
- Bian, K.; Zhang, G.; Song, L. Toward secure crowd sensing in vehicle-to-everything networks. IEEE Netw. 2017, 32, 126–131. [Google Scholar] [CrossRef]
- Luo, Q.; Liu, J. Wireless telematics systems in emerging intelligent and connected vehicles: Threats and solutions. IEEE Wirel. Commun. 2018, 25, 113–119. [Google Scholar] [CrossRef]
- Al-Sabaawi, A.; Al-Dulaimi, K.; Foo, E.; Alazab, M. Addressing Malware Attacks on Connected and Autonomous Vehicles: Recent Techniques and Challenges. In Malware Analysis Using Artificial Intelligence And Deep Learning; Springer: Cham, Switzerland, 2021; pp. 97–119. [Google Scholar]
- Fey, M.; Lenssen, J. Fast graph representation learning with PyTorch Geometric. arXiv 2019, arXiv:1903.02428. [Google Scholar]
- Bock, S.; Weiß, M. A proof of local convergence for the Adam optimizer. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–8. [Google Scholar]


{kind=link}
| Actual/Predicted as | Positive | Negative |
|---|---|---|
| Positive | ||
| Negative |
| Parameter | Value |
|---|---|
| #epoch | 100 |
| #hidden units | {16, 32, 64, 128} |
| #layers | 3 |
| Dropout rate | 0.2 |
| L2-regularization rate | 0.01 |
| Optimizer | Adam |
| Parameter | Value |
|---|---|
| size of the feature embeddings | 50 |
| # random walks | 5 |
| maximum # nodes to be visited | 80 |
| p | 0.5 |
| q | 2 |
| GAT | GCN | |||
|---|---|---|---|---|
| # Neurons | Accuracy | F-Measure | Accuracy | F-Measure |
| 16 | 0.924 | 0.901 | 0.900 | 0.870 |
| 32 | 0.934 | 0.916 | 0.901 | 0.875 |
| 64 | 0.947 | 0.927 | 0.915 | 0.898 |
| 128 | 0.937 | 0.920 | 0.906 | 0.887 |
| GAT | GCN | |||
|---|---|---|---|---|
| # Neurons | Accuracy | F-Measure | Accuracy | F-Measure |
| 16 | 0.945 | 0.918 | 0.914 | 0.889 |
| 32 | 0.953 | 0.932 | 0.923 | 0.902 |
| 64 | 0.961 | 0.948 | 0.933 | 0.918 |
| 128 | 0.955 | 0.938 | 0.927 | 0.908 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Catal, C.; Gunduz, H.; Ozcan, A. Malware Detection Based on Graph Attention Networks for Intelligent Transportation Systems. Electronics 2021, 10, 2534. https://doi.org/10.3390/electronics10202534
Catal C, Gunduz H, Ozcan A. Malware Detection Based on Graph Attention Networks for Intelligent Transportation Systems. Electronics. 2021; 10(20):2534. https://doi.org/10.3390/electronics10202534
Chicago/Turabian StyleCatal, Cagatay, Hakan Gunduz, and Alper Ozcan. 2021. "Malware Detection Based on Graph Attention Networks for Intelligent Transportation Systems" Electronics 10, no. 20: 2534. https://doi.org/10.3390/electronics10202534