
A Simple and Robust Equalization Algorithm for Variable Modulation Systems


Abstract
:1. Introduction
2. Conventional Equalization Algorithm
2.1. CMA
2.2. MCMA
2.3. DDLMS Algorithm
3. Proposed Equalization Algorithm for VM System
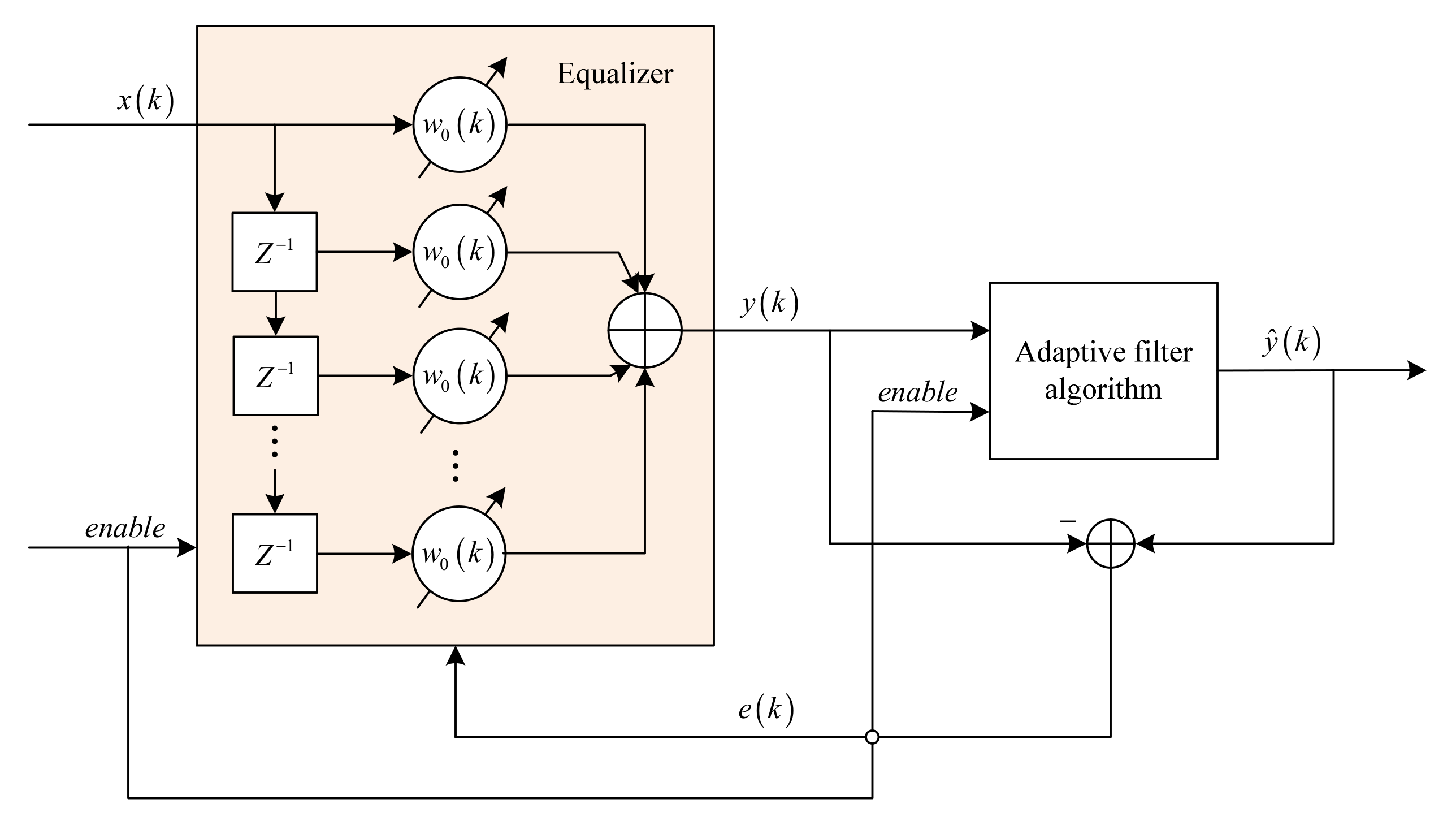
3.1. VM-DDLMS Algorithm
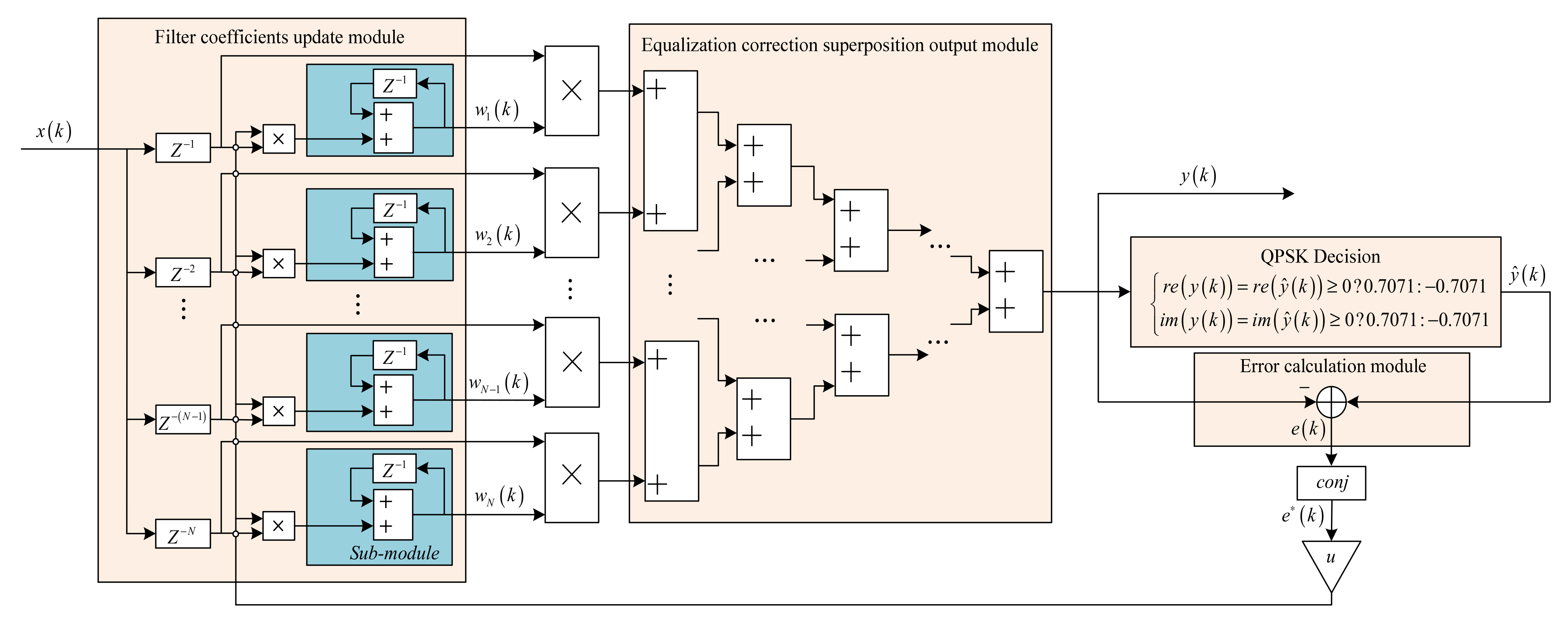
3.2. VM-DDLMS Algorithm Parallel Structure
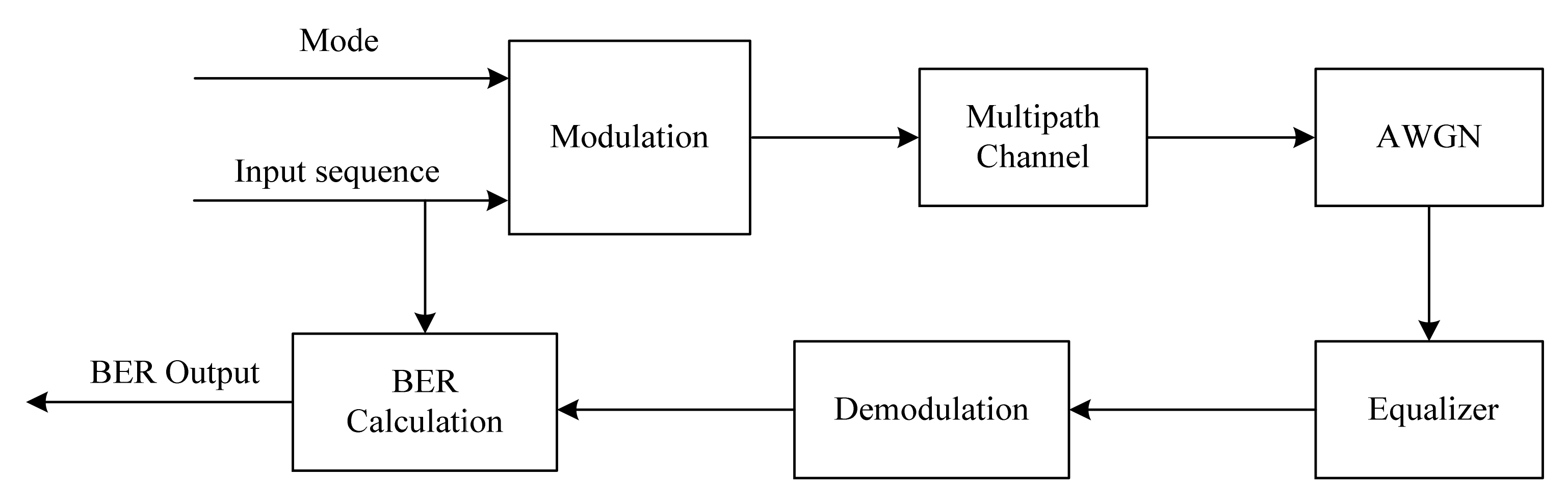
4. Equalization Algorithm Simulation and Hardware Implementation
4.1. Performance Simulation of Different Equalization Algorithms
4.2. Performance Analysis of Different Algorithm Implementations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sato, Y. A Method of Self-Recovering Equalization for Multilevel Amplitude-Modulation Systems. IEEE Trans. Commun. 1975, 23, 679–682. [Google Scholar] [CrossRef]
- Godard, D. Self-Recovering Equalization and Carrier Tracking in Two-Dimensional Data Communication Systems. IEEE Trans. Commun. 1980, 28, 1867–1875. [Google Scholar] [CrossRef] [Green Version]
- Treichler, J.; Agee, B. A new approach to multipath correction of constant modulus signals. IEEE Trans. Acoust. Speech Signal. Process. 1983, 31, 459–472. [Google Scholar] [CrossRef]
- Oh, K.N.; Chin, Y.O. New blind equalization techniques based on constant modulus algorithm. In Proceedings of the GLOBECOM ’95, Singapore, 14–16 November 2002. [Google Scholar]
- Ang, L.; Tiandong, D.; Xiangqian, F.; Wei, R. Implementation of Blind Equalization Algorithm for HF QAM Based on DSP. In Proceedings of the 2006 International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 22–24 September 2006; pp. 1–4. [Google Scholar]
- Tao, L.; Wang, Y.; Gao, Y.; Lau, A.P.T.; Chi, N.; Lu, C. 40 Gb/s CAP32 System With DD-LMS Equalizer for Short Reach Optical Transmissions. IEEE Photon.-Technol. Lett. 2013, 25, 2346–2349. [Google Scholar] [CrossRef]
- Liu, S.; Shen, G.; Zhang, W.; Tian, H. A 60-GHz RoF System with Blind VSS-DD-LMS Equalizer for Optical-Wireless Trans-mission. IEEE Photon. Technol. Lett. 2016, 28, 2383–2386. [Google Scholar] [CrossRef]
- Priyadarshi, P.; Rai, C.S. Blind channel equalization using modified constant modulus algorithm. In Proceedings of the 2016 International Conference on Computing, Communication and Automation (ICCCA), Greater Noida, India, 29–30 April 2016. [Google Scholar]
- Badran, M.S.T. Blind equalization based on a cascade of a new algorithm and multi-step prediction error filter. In Proceedings of the 2016 Fourth International Japan-Egypt Conference on Electronics, Communications and Computers (JEC-ECC), Cairo, Egypt, 31 May–2 June 2016. [Google Scholar]
- Abrar, S.; Nandi, A.K. An Adaptive Constant Modulus Blind Equalization Algorithm and Its Stochastic Stability Analysis. IEEE Signal. Process. Lett. 2009, 17, 55–58. [Google Scholar] [CrossRef]
- Arikawa, M.; Sato, M.; Hayashi, K. Wide range rate adaptation of QAM-based probabilistic constellation shaping using a fixed FEC with blind adaptive equalization. Opt. Express 2020, 28, 1300–1315. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
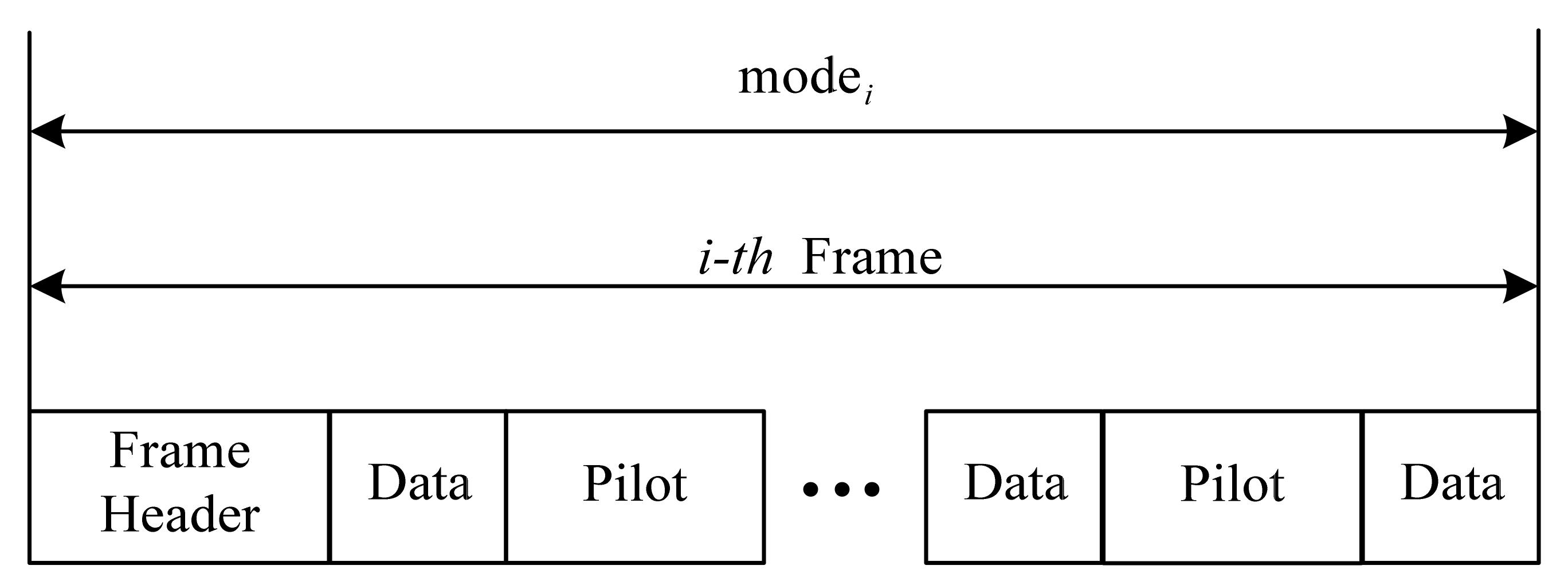
| Modulation Method | Code Length | Frame Length |
|---|---|---|
| QPSK | 8160 | 4242 |
| 8PSK | 8160 | 2846 |
| 16APSK | 8160 | 2166 |
| 32APSK | 8160 | 1758 |
| Equalization Algorithm | CMA | MCMA | VM-DDLMS |
|---|---|---|---|
| DSP | 184 (9.58%) | 184 (9.58%) | 176 (9.17%) |
| LUT | 2364 (0.98%) | 2286 (0.94%) | 2300 (0.95%) |
| Register | 4542 (0.94%) | 4539 (0.94%) | 4440 (0.92%) |
| Workable Clock (MHz) | 263.15 | 256.41 | 333.33 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, W.; Wang, Z.; Mei, R.; Lin, M. A Simple and Robust Equalization Algorithm for Variable Modulation Systems. Electronics 2021, 10, 2496. https://doi.org/10.3390/electronics10202496
Hu W, Wang Z, Mei R, Lin M. A Simple and Robust Equalization Algorithm for Variable Modulation Systems. Electronics. 2021; 10(20):2496. https://doi.org/10.3390/electronics10202496
Chicago/Turabian StyleHu, Wanru, Zhugang Wang, Ruru Mei, and Meiyan Lin. 2021. "A Simple and Robust Equalization Algorithm for Variable Modulation Systems" Electronics 10, no. 20: 2496. https://doi.org/10.3390/electronics10202496