
Meta-Heuristic Optimization Techniques Used for Maximum Power Point Tracking in Solar PV System

 , , , and
, , , and
Abstract
:1. Introduction
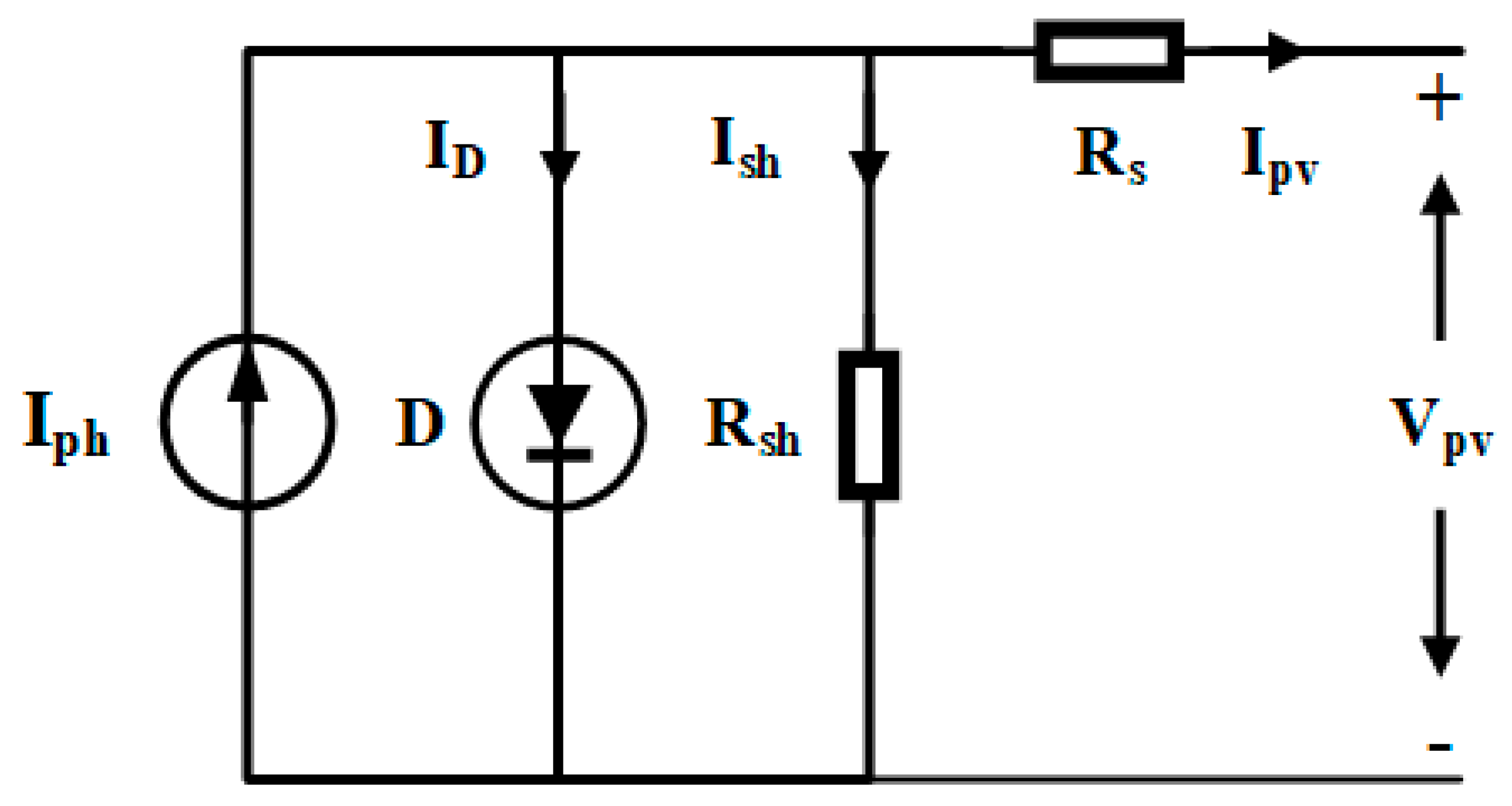
2. Equivalent Circuit Model of Solar Cell
3. Solar Cell Characteristic
4. Influence of Environmental Factors on I–V and P–V Characteristic Curves
4.1. Effect of Varying Temperature on I–V and P–V Characteristicsof the Solar Cell
4.2. Effect of Varying Insolation on I–V and P–V Characteristicsof the Solar Cell
5. Partial Shading Condition
6. Maximum Power Point Tracking Algorithms
6.1. Conventional MPPT Strategies
6.1.1. Perturb and Observe (P&O) MPPT Technique
6.1.2. Incremental Conductance MPPT Algorithm
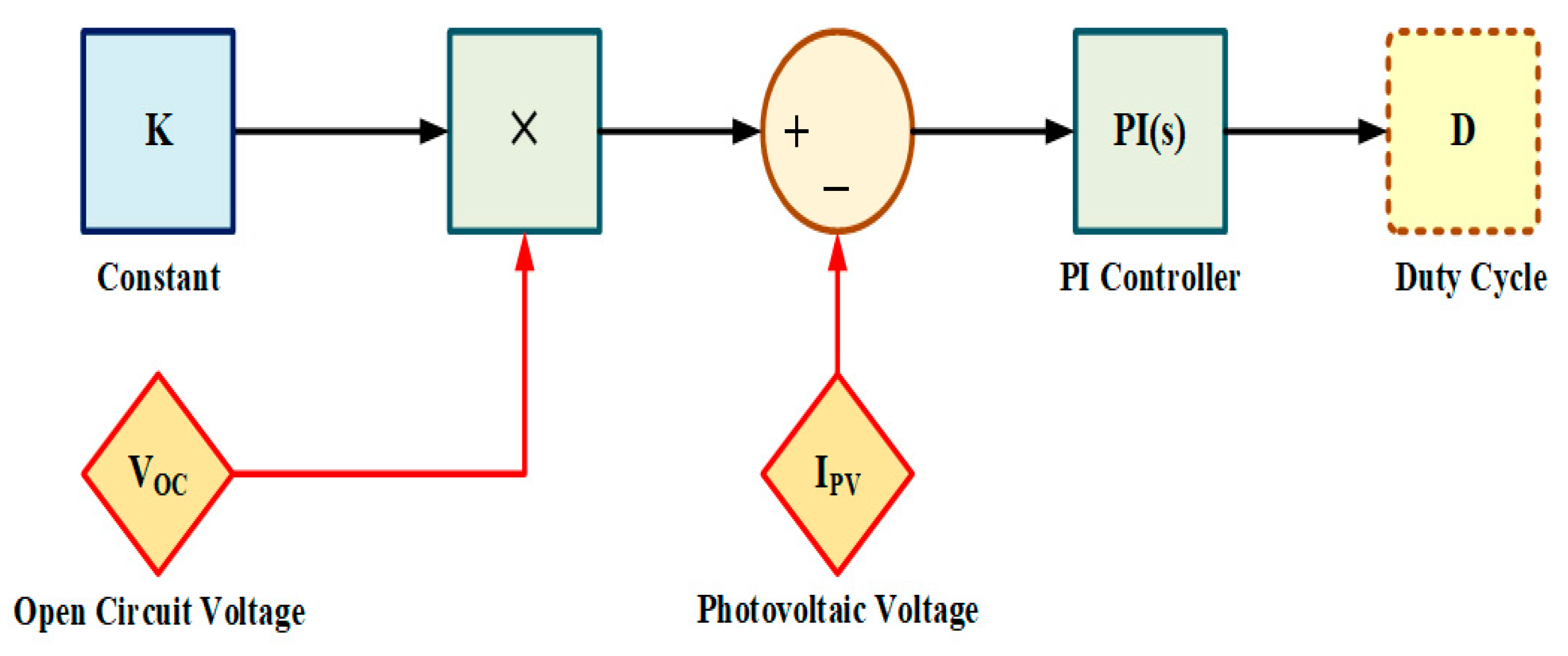
6.1.3. Fractional Open Circuit Voltage MPPT Method
6.1.4. Fractional Short Circuit Current Technique

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors, Year | Strategies Involved | Control Parameter | DC-DC Converter | Controller Implementation | Findings/Remarks |
|---|---|---|---|---|---|
| M. H. Osman, et al. [28], 2021 | Traditional, two-step size, and variable-step scale P&O | V | Boost converter | MATLAB/Simulink |
|
| G. A. Raiker, et al. [29], 2021 | Momentum-based P&O + voltage directed current control | V and I | Boost Converter | TMS320F28379D, C2000 series controller |
|
| S. Manna, et al. [30], 2021 | Conventional, drift-free, and updated, P&O MPPT methods. | Du | Boost converter | MATLAB/Simulink |
|
| P. E. Sarika, et al. [31], 2020 | Variable Step Size Zero Oscillation P&O (i.e., VSS ZOPO)+ Look-Up Table (LUT) technique | Du | Boost converter | MATLAB/Simulink |
|
| D. Ounnas, et al. [32], 2021 | Modified INC strategy | Step size and permitted error | Boost converter | MATLAB/Simulink, and Arduino mega board |
|
| M. Hebchi, et al. [33], 2021 | Improved INC algorithm | & | Boost converter | MATLAB/Simulink |
|
| M. A. B. Siddique, et al. [34], 2021 | Linearly modified INC-MPPT method | & | Boost converter | MATLAB/Simulink |
|
| M. N. Ali, et al. [35], 2021 | Variable step INC + FLC MPPT method | Du | Boost converter | MATLAB/Simulink |
|
| D. Baimel, et al. [36], 2019 | Semi-pilot cell (SPC) FOCV and Semi-pilot panel (SPP) FOCV strategy | VOC | Buck-Boost converter | MATLAB/Simulink |
|
| M. Krishnan M, et al. [37], 2019 | FOCV + P&O MPPT algorithms | VOC | Buck converter | MATLAB/Simulink |
|
| K. R. Bharath, et al. [38], 2017 | Improved FOCV technique | Experimentally calculated factor; k | Buck Converter | AVR supported ATMega16 microcontroller |
|
| C. B. N. Fapi, et al. [39], 2021 | Enhanced FSCC MPPT strategy | Boost Converter | Matlab/Simulink + Control Desk Software + DS1104 control board |
| |
| H. A. Sher, et al. [40], 2015 | Modified FSCC MPPT technique | error | Buck-Boost converter | Matlab/Simulink + dSPACE DS1104 based controller board |
|
6.2. Meta-Heuristic Techniques
6.2.1. Swarm Intelligence Methods
- (a)
- Particle Swarm Optimization Method
- (b)
- Ant Colony Optimization Strategy
- k indicates the weight factor for the kth solution;
- represents the kth sub-Gaussian function for the ith dimension;
- symbolizes the ith dimensional standard deviation for the kth solution;
- signifies the ith means value for the kth solution.
- (c)
- Artificial Bee Colony Technique
- In the solution course, the sources reached by the bees in the food search relate to the possible optimum values. In the ABC strategy, the nectar amount is computed. The nectar idea is utilized in light of the nature of the solution values gainedfrom the sources.
- The nectar (food) in each source must be taken by only one employer bee. For this situation, the absolute number of food sources and employer bees are considered equivalent.
- Step-1 [Initialization Phase]: Randomly build Ns food source in the search space. The larger the group is, the better is the performance of the algorithm. To distribute all the employed bees corresponding to each unique food source as per Equation (22), each solution Xi is an n-dimensional vector.
- Step-2 (Employed Bee Phase): The aim is to follow the food source position with maximum nectar available (i.e., GMPP) in the search area. Each employed bee advances its new position (Vi,j) in the proximity space using the old position value (Xi) to keep safely in memory, as per Equation (23).
- Step-3 (Onlooker Bee Phase): According to the information (i.e., the nectars in the food sources) conveyed by the employed bees to the onlooker bees with the assistance of a waggle dance, onlooker bees perform the probabilistic selection process for the selection of food sources (solutions). The probability of selection of each food source is computed using Equation (24).
- Step-4 (Scout Bee Phase): As per Equation (24), scout bees can discover new promising solutions around the selected food source. In any case, the fitness value of a food source remains unenhanced for the given step even after the inspection of the whole search area by employed and onlooker bees. In the next step, the corresponding employed bees become scout bees, and the scout bees look for new possible solutions, utilizing Equation (22).
- Step-5 (Conclusion Phase): The entire procedure ceases when there is no further improvement in the output power. However, when there is a fluctuation in the output power, the process will reinitiate. The fluctuation effect can be because of solar insolation changes. Such changes in insolation are represented by the inequality condition, represented in Equation (25).
- (d)
- Grey Wolf Optimization Technique
- Social Hierarchy:
- ii.
- Tracking and Encircling the prey:
- iii.
- Hunting:
- iv.
- Attack the prey:
- v.
- Search for a prey:
- (e)
- Emperor Penguin Optimization MPPT Technique
- Identify and set the huddle boundary of emperor penguins’;
- Measurementof the temperature profile of the herd;
- Calculationof the distance between emperor penguins. The distance is responsible forexploration and exploitation;
- The effective mover (the best optimal solution) is procured;
- Reposition of the effective mover.
- Step 1: Initialize rand2, rand3, p, TM, , C, E, SF(C), m, T, and w.
- Step 2: Develop initial values for essential parameters like B(x). Then, estimate theirequivalentfitness values.
- Step 3: Set the initial best optimal solution among the initially calculated fitness values.
- Step 4: Begin the first iteration by computing the new values of TM0, SF(C), PG(te), and C.
- Step 5: Compute the value of d. Then, operate it in the best solution; Bep(x) function toevaluate the newly updated solution B(x + 1).
- Step 6: Evaluate the new best optimal solution and save it in Bep(x). Furthermore, save the corresponding best fitness.
- Step 7: Check for maximum iteration count if it has not been reached. Then, replicate until the maximum number of iterations is achieved.
- Step 8: Notice the fitness array to establish the optimum fitness in it. Later,present it in the corresponding result.
- (f)
- Salp Swarm Algorithms
- Step_1: Initialize salps’ population Lm,t such that m = 1, 2, …, M, and t = 1, 2, …, N.
- Step_2: Assess thewhole population
- Step_3: Identifythe fittest salp, i.e., P
- Step_4: Modify d1 using Equation (39)
- Step_5: Update candidate solutions for leaders using (38)
- Step_6: Update candidate solutions for followers using (40)
- Step_7: Modify the candidate solutions breaching the maximum and minimum values of Decemberision variables
- Step 8: Print the corresponding result.
- (g)
- Jaya Algorithm
- Step_1: Initialization of the population size, the total count of designed variables, and the termination condition.
- Step_2: Repeat Step3 to Step5 until the termination condition is fulfilled.
- Step_3: Evaluate the solutions for the objective function.
- Step_4: Compute the modified solution utilizing Equation (41).
- Step_5: Update the previous solution, if Y′u,v,i > Y′u,v,i. Otherwise, the previous solution is retained.
- Step_6: Display the final best solution.
| Authors, Year | Strategies Involved | Control Parameter | DC-DC Converter | Controller Implementation | Findings/Remarks |
|---|---|---|---|---|---|
| L. Zaghba, et al. [64], 2021 | PSO + FLC MPPT algorithm | Fuzzy gain | Boost converter | MATLAB/Simulink |
|
| Z. E. Hariz, et al. [65], 2021 | PSO + GA + P&O MPPT method | PID regulatory parameters | Buck-Boost converter | MATLAB/Simulink |
|
| G. Krishnan, et al. [66], 2020 | Modified ACO MPPT technique | Du variation | Boost converter | MATLAB/Simulink |
|
| K. Rajalashmi, et al. [67], 2018 | Ant colony optimization based on new pheromone update (ACO NPU) | Du | Buck-Boost converter | MATLAB/Simulink |
|
| C. González-Castaño, et al. [68], 2021 | Novel ABC MPPT strategy | Du | Boost converter | Digital signal controller (DSC): TI 28069M and high-speed simulator: PLECS RT Box |
|
| M. R. Fanani, et al. [69], 2020 | ABC MPPT strategy | Du | Zeta converter | PSIM Simulator |
|
| F. R. Hasan, et al. [70], 2021 | GWO with constant power generation (CPG) MPPT strategy | Power limit | SEPIC converter | PSIM software |
|
| J. Jayaudhaya, et al. [57], 2020 | Multi-objective GWO method | Du | Boost converter | MATLAB/Simulink |
|
| M. A. Sameh, et al. [59], 2021 | EPO MPPT strategy | Du | Boost converter | MATLAB/Simulink and PI controller |
|
| M. N. I. Jamaludin, et al. [71], 2021 | SSO MPPT algorithm | Du | Buck-Boost converter | MATLAB/Simulink, TMS320F28335 DSP controller, Code Composer Studio (CCS) |
|
| A. F. Mirza, et al. [72], 2020 | SSO MPPT strategy | Du | Buck-Boost converter | MATLAB/Simulink, Atmel ATMEGA-2560 |
|
| H. Deboucha, et al. [73], 2020 | Modified JA MPPT method | Du | Boost converter | dSPACE CP1104-TMS320F240 DSP |
|
6.2.2. Bio-Inspired Algorithm
- (a)
- Cuckoo Search MPPT Technique
- i.
- Each cuckoo bird lays a single egg at a time and puts it in a haphazardly selected host nest;
- ii.
- The nest withthe best high-quality eggs (i.e., the optimal solutions) will carry forward the next generation of cuckoos;
- iii.
- The total count of the accessible host nests is fixed in the search space. The likelihood that the host bird will find the foreign egg is denoted by Pf, which lies in the range (0 ≤ Pf ≤ 1).
- (b)
- Flying Squirrel Search Optimization Strategy
- Step1: CBS moves towards the course chosen by the globally leading solution;
- Step2: Part of USs progress towards the Optimum Solution (OS);
- Step3: The surplus US progresses towards CBS.
- ▪
- The aim (food point of supply) resembles the PV power yield (PPV).
- ▪
- The choice variable, i.e., the stance, is considered a duty ratio (D) of the converter employed in the MPPT technique.
- ▪
- The FSSO strategy is appropriately custom-fitted by wiping out the presence of hunters to lessen the time to reach the GMPP.
- Occasional observing conditions: Occasional observing conditions prevent the algorithm from being caught in local maxima. For a solitary dimensional space, the periodic consistent (OC) and its base worth (Omin) is estimated by:
- ii.
- Groove contemporized: The hickory tree squirrels abide in their stance. Although, the acorn tree squirrels navigate to approach the hickory tree. However, the erratically chosen squirrel ETFS from ordinary trees navigate toward the hickory tree, while the leftover (NTFS − ETFS) is pushed toward the acorn tree. The comparing duty ratios are refreshed as per the following conditions:
- iii.
- Convergence Resolution: If the adjustment instance of every FSs evolves into a diminutive ratherthan an edge. Moreover, if the maximum count of iteration has arrived, then in such a case, the improved algorithm is ended and yields the duty cycle at the point at which the converter works while following GMPP.
- iv.
- Re-Initialization:As the MPPT strategy is the time variation advancement, the frequently changing climate conditions harm the wellness esteem. In the circumstances mentioned above, the FSs stances (i.e., duty ratio) will reinitialize to look for the new GMPP once more. The duty ratio will reinitialize by accompanying the limitation condition as inEquation (57). The reinitialization is in the wake of distinguishing the change in insolation.
- (c)
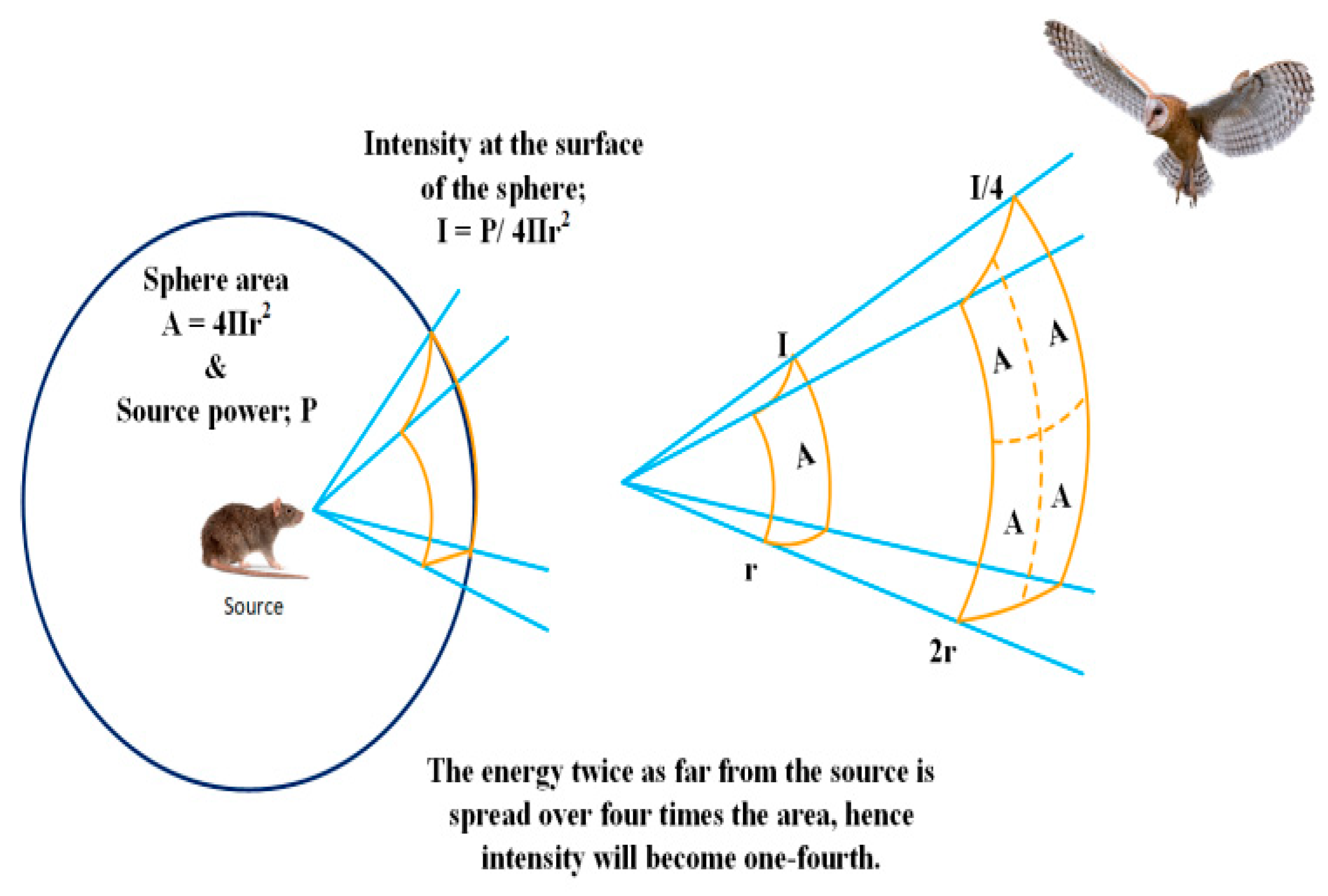
- Owl search Algorithm (OSA)
- (d)
- Firefly Algorithm (FFA)
- ▪
- To entice other fireflies.
- ▪
- To lure their prey.
| Authors, Year | Strategies Involved | Control Parameter | DC-DC Converter | Controller Implementation | Findings/Remarks |
|---|---|---|---|---|---|
| S. Akram, et al. [85], 2021 | Direct control CS method | Du | - | MATLAB/Simulink |
|
| A. Raj, et al. [86], 2021 | Improved PSO and CS MPPT algorithms | Du | Boost converter | MATLAB |
|
| N. Singh, et al. [79], 2020 | FSSO MPPT strategy | Du | Quasi-Z-source Converter | MATLAB/Simulink |
|
| A. F. Farhan, et al. [81], 2019 | OSA + P&O MPPT strategy | Du | Boost converter | MATLAB/Simulink |
|
| S. N. Altamimi, et al. [87], 2021 | OSA + INC MPPT strategy | Du | Boost converter | MATLAB/Simulink |
|
| M. Zhang, et al. [88], 2020 | FA + vaccine database MPPT strategy | Du | - | MATLAB/Simulink |
|
| J. Farzaneh, et al. [89], 2020 | Modified FA MPPT method | Du | Boost converter | MATLAB/Simulink |
|
6.2.3. Artificial Intelligent (AI) Methods
- (a)
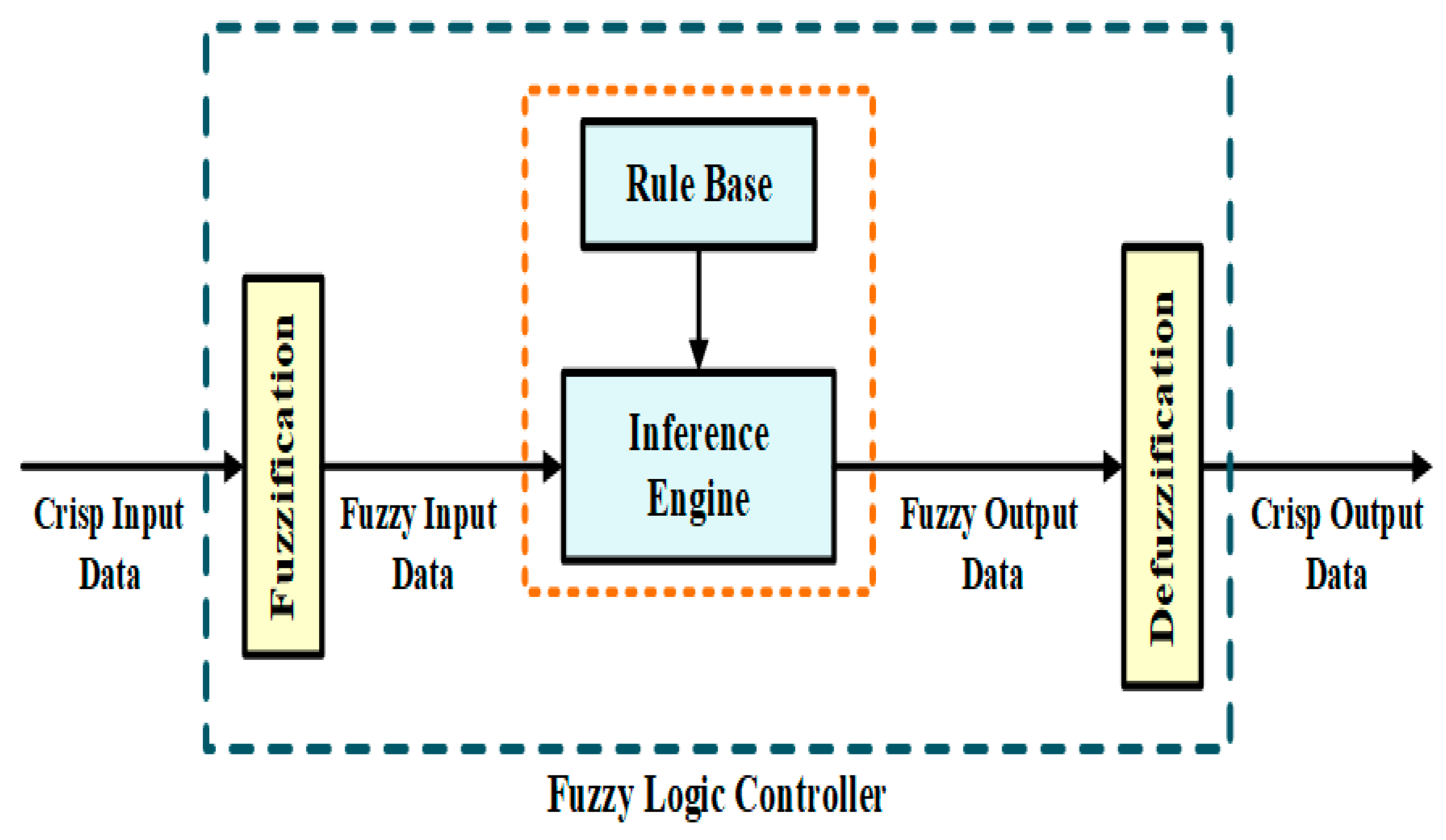
- Fuzzy Logic Controller Strategy
- Demerits:
- (b)
- Artificial Neural Network Strategy
Evolutionary Computational Strategies
- (a)
- Genetic Algorithm
- Initialization: initially, an arbitrary population with Ń binary individuals is generated with a length Decemberision (bits number Ṡ, exactness). The population consists of a binary matrix (71) in which the count of lines addresses the number of individuals, whereas the column number symbolizes the length of individuals.
- Assessment:
- In this appraisal process, the possibility of an individual to be picked is decided by the fitness function value, so it is a crucial step. In the case of MPPT, the fitness function is the power of the PV module (i.e., Ppv). For each individual, the fitness function is computed, and then its value is utilized to produce a new generation by taking the current value as the parent population as per the fitness function.
- Genetic Functioning:
- The operations employed in this step are the foundation of the GA strategy. These do not reject the probability hypotheses, yet they give fascinating tasks; these tasks are:
- Selection:The selection method employed is known as the roulette wheel selection. The probability of the kth individual to be picked is computed by utilizing Equation (72).
- Crossover:In this operation, reproduction is performed by crossing the pairs of individuals to produce the novel ones (i.e., children).
- Mutation:In this process, mutation analogous to the biological one is applied. The alteration of one or more genes occurs in a chromosome with the likelihood of change in the random bit from its original form.
- Insertion:It is a replacement process in which the new population is integrated with the previous group of individuals. Later, the individuals withpoor fitness function values are replaced.
- Program End:
- Eventually, the algorithm produces a new population consisting of the best individuals. The program will terminate after reaching the desired output as per the system.
- (b)
- Differential Evolution
| Authors, Year | Strategies Involved | Control Parameter | DC-DC Converter | Controller Implementation | Findings/Remarks |
|---|---|---|---|---|---|
| T. Sutikno, et al. [100], 2021 | FLC MPPT strategy + Generalized Bell (GBell) membership function | PWM feed | High gain voltage DC-DC converter | MATLAB/Simulink |
|
| W. S. E. Abdellatif, et al. [101], 2021 | Modified FLC algorithm | Fuzzy rule | Boost Converter | MATLAB/Simulink |
|
| M. L. Azad, et al. [102], 2020 | Fuzzy based Strategy | Du variation | Boost converter | MATLAB/Simulink |
|
| A. Raj, et al. [103], 2021 | Feed-forward weight updating + INC method for training | Du | Boost converter | soft-computer MPPT controller |
|
| A. I. Khan, et al. [104], 2021 | Modified ANN algorithm | Du | Boost converter | MATLAB/Simulink |
|
| M. N. Ali, et al. [105], 2021 | ANN + Metaheuristic + Fuzzy-Logic Techniques | Change of Du | Boost converter | MATLAB/Simulink |
|
| M. Jamaiti [106], 2021 | Enhanced GA method | Du | Buck-Boost converter | MATLAB/Simulink |
|
| K. H. Chao, et al. [107], 2021 | GA + ACO | Du | Boost converter | MATLAB/Simulink |
|
| R. Alayi, et al. [108], 2021 | Improved GA strategy | PV panel spatial angel | - | MATLAB/Simulink |
|
| M. S. Ahmad, et al. [109], 2021 | PSO + DE | V | - | MATLAB/Simulink |
|
| K. G. Babu, et al. [110], 2018 | Whale Optimization (WO) + DE MPPT strategies | Du | Boost Converter | MATLAB/Simulink |
|
| K. S. Tey, et al. [111], 2018 | Improved DE MPPT strategy | Target vectors | Single-ended primary-inductance converter (SEPIC) | PSIM Electronic Simulation Software and PIC18F4520 microcontroller. |
|
7. Comparison and Analysis
- i.
- Algorithm Complexity
- ii.
- Implementation
- iii.
- Cost
- iv.
- Following and Convergence Speed
8. Simulation Results
9. Future Research Work Recommendations
- i.
- An analysis of the accuracy of the MPPT techniques during the hot spot process. Since the last Decemberade, the hot spot has emerged as one of the prominent problems affecting the efficiency of the MPPT algorithms.
- ii.
- For the real-time assessment of the MPPT algorithms, the time period should be about one week/month.
- iii.
- Moreover, hybrid algorithms can be examined in the future. Asfor now hybrid strategies are ina boom, these methods avoid the disadvantage of two or more algorithms being taken into account. Thus, a combination of different algorithms complements each other.
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Husain, M.A.; Tariq, A.; Hameed, S.; Bin Arif, M.S.; Jain, A. Comparative assessment of maximum power point tracking procedures for photovoltaic systems. Green Energy Environ. 2017, 2, 5–17. [Google Scholar] [CrossRef]
- Guangul, F.M.; Chala, G.T. Solar Energy as Renewable Energy Source: SWOT Analysis. In Proceedings of the 4th MEC International Conference on Big Data and Smart City (ICBDSC), Muscat, Oman, 15–16 January 2019. [Google Scholar]
- Selvan, S.; Nair, P.U. A review on Photo Voltaic MPPT algorithms. Int. J. Electr. Comput. Eng. IJECE 2016, 6, 567–582. [Google Scholar]
- Singh, N.; Goswami, A. Study of P-V and I-V Characteristics of Solar Cell in MATLAB/Simulink. Int. J. Pure Appl. Math. 2018, 118, 24. [Google Scholar]
- Xu, L.; Cheng, R.; Yang, J. A New MPPT Technique for Fast and Efficient Tracking under Fast Varying Solar Irradiation and Load Resistance. Int. J. Photoenergy 2020. [Google Scholar] [CrossRef]
- Kchaou, A.; Naamane, A.; Koubaa, Y.; Sird, N.K.M. Review of different MPPT techniques for a photovoltaic generation systems. J. Autom. Syst.Eng. 2017, 11, 195–207. [Google Scholar]
- Mandadapu, U.; Vedanayakam, S.; Thyagarajan, K. Effect of temperature and irradiance on the electrical performance of a pv module. Int. J. Adv. Res. 2017, 5, 2018–2027. [Google Scholar] [CrossRef] [Green Version]
- Apoorva, G.V.S.; Manohar, T.G.; Uma, B.R. Performance Characteristics of solar cells in Space under Shadow Effect. Int. J. Eng. Res. Appl. 2017, 7, 9–15. [Google Scholar]
- Kumar, V.; Kumar, P.; Srinivasa, S.; Puranik, C.R. Study the Effect of Partial Shading in Solar Photovoltaic System. Int. J. Eng. Res. Technol. IJERT 2019, 7, 1–5. [Google Scholar]
- Djalab, A.; Bessous, N.; Rezaoui, M.M.; Merzouk, I. Study of the effects of Partial Shading on PV Array. In Proceedings of the International Conference on Communications and Electrical Engineering (ICCEE), El Oued, Algeria, 17–18 December 2018. [Google Scholar]
- Patel, H.; Gupta, M.; Bohre, A.K. Mathematical Modeling and Performance Analysis of MPPT based Solar PV System. In Proceedings of the International Conference on Electrical Power and Energy Systems (ICEPES), Bhopal, India, 14–16 December 2016. [Google Scholar]
- Nkambule, M.; Hasan, A.; AliJ, A. Proportional study of Perturb & Observe and Fuzzy Logic Control MPPT Algorithm for a PV system under different weather conditions. In Proceedings of the IEEE 10th GCC Conference and Exhibition, Kuwait, Kuwait, 19–23 April 2019. [Google Scholar]
- Nabipour, M.; Razaz, M.; Seifossadat, S.G.H.; Mortazavi, S.S. A new MPPT scheme based on a novel fuzzy approach. Sci. Direct J. Renew. Sustain. Energy Rev. 2017, 74, 1147–1169. [Google Scholar] [CrossRef]
- Azad, M.L.; Sadhu, P.K.; Das, S.; Satpati, B.; Gupta, A.; Arvind, P.; Biswas, R. An Improved Approach to Design A Photovoltaic Panel. Indones. J. Electr. Eng. Comput. Sci. 2017, 5, 515–520. [Google Scholar] [CrossRef] [Green Version]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of Perturb and Observe Maximum Power Point Tracking Method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- PSzemes, T.; Melhem, M. Analyzing and modeling PV with ‘P&O’ MPPT Algorithm by MATLAB/SIMULINK. In Proceedings of the IEEE conference on International Symposium on Small-scale Intelligent Manufacturing Systems (SIMS), Gjovik, Norway, 10–12 June 2020. [Google Scholar]
- Abdelsalam, A.K.; Massoud, A.M.; Ahmed, S.; Enjeti, P. High-performance adaptive perturb and observe MPPT technique for photovoltaic- based microgrids. IEEE Trans. Power Electron. 2011, 26, 1010–1021. [Google Scholar] [CrossRef]
- Guiza, D.; Ounnas, D.; Soufi, Y.; Bouden, A.; Maamri, M. Implementation of Modified Perturb and Observe Based MPPT Algorithm for Photovoltaic System. In Proceedings of the 1st International Conference on Sustainable Renewable Energy Systems and Applications (ICSRESA), Tebessa, Algeria, 4–5 December 2019. [Google Scholar]
- Jain, K.; Gupta, P.M.; Bohre, D.A.K. Implementation and Comparative Analysis of P&O and INC MPPT Method for PV System. In Proceedings of the IEEE International Conference on Power Electronics (IICPE), Jaipur, India, 13–15 December 2018. [Google Scholar]
- Azad, M.L.; Sadhu, P.K.; Das, S. Comparative Study Between P&O and Incremental Conduction MPPT Techniques: A Review. In Proceedings of the International Conference on Intelligent Engineering and Management (ICIEM), London, UK, 17–19 June 2020. [Google Scholar] [CrossRef]
- Mustafić, D.; Jokić, D.; Lale, S.; Lubura, S. Implementation of Incremental Conductance MPPT Algorithm in Real Time in Matlab/Simulink Environment with Humusoft MF634 Board. In Proceedings of the 9th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 8–11 June 2020. [Google Scholar]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Power Electronics and Control Techniques for Maximum Energy Harvesting in Photovoltaic Systems; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Murtaza, A.F.; Sher, H.A.; Chiaberge, M.; Boero, D.; Giuseppe, M.D.; Addoweesh, K.E. Comparative Analysis of Maximum Power Point Tracking Techniques for PV applications. In Proceedings of the IEEE International Conference on Multi Topic, Lahore, Pakistan, 19–20 December 2013. [Google Scholar]
- Atri, P.K.; Modi, P.S.; Gujar, N.S. Comparison of Different MPPT Control Strategies for Solar Charge Controller. In Proceedings of the International Conference on Power Electronics & IoT Applications in Renewable Energy and its Control (PARC), Mathura, India, 28–29 February 2020. [Google Scholar]
- Baroi, S.; Sarker, P.C.; Baroi, S. An Improved MPPT Technique—Alternative to Fractional Open Circuit Voltage Method. In Proceedings of the International Conference on Electrical & Electronic Engineering (ICEEE), Rajshahi, Bangladesh, 2–29 December 2017. [Google Scholar]
- Nyarko, I.O.; Elgenedy, M.A.; Ahmed, K. Combined Temperature and Irradiation Effects on the Open Circuit Voltage and Short Circuit Current Constants for Enhancing their Related PV-MPPT Algorithms. In Proceedings of the IEEE Conference on Power Electronics and Renewable Energy (CPERE), Eswan, Egypt, 23–25 October 2019. [Google Scholar]
- Danoune, M.B.; Djafour, A.; Gougui, A.; Khelfaoui, N.; Boutelli, H. Study and Performance Analysis of Three Conventional MPPT Algorithms Used in Photovoltaic Applications. In Proceedings of the International Conference on Communications and Electrical Engineering (ICCEE), El Oeud, Algeria, 17–18 December 2018. [Google Scholar]
- Osman, M.H.; Ahmed, M.K.; Refaat, A.; Korovkin, N.V. A Comparative Study of MPPT for PV System Based on Modified Perturbation & Observation Method. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg/Moscow, Russia, 26–29 January 2021. [Google Scholar] [CrossRef]
- Raiker, G.A.; Loganathan, U.; Reddy, S.B. Current Control of Boost Converter for PV Interface With Momentum-Based Perturb and Observe MPPT. IEEE Trans. Ind. Appl. 2021, 57, 4071–4079. [Google Scholar] [CrossRef]
- Manna, S.; Akella, A.K. Comparative analysis of various P & O MPPT algorithm for PV system under varying radiation condition. In Proceedings of the 2021 1st International Conference on Power Electronics and Energy (ICPEE), Bhubaneswar, India, 2–3 January 2021. [Google Scholar] [CrossRef]
- Sarika, P.E.; Jacob, J.; Mohammed, S.; Paul, S. A Novel Hybrid Maximum Power Point Tracking Technique with Zero Oscillation based on P&O Algorithm. Intern. J. Renew. Energy Res. IJRER 2020, 10, 1962–1973. [Google Scholar]
- Ounnas, D.; Guiza, D.; Soufi, Y.; Maamri, M. Design and Hardware Implementation of Modified Incremental Conductance Algorithm for Photovoltaic System. Adv. Electr. Electron. Eng. 2021, 19, 100–111. [Google Scholar]
- Hebchi, M.; Kouzou, A.; Choucha, A. Improved Incremental conductance algorithm for MPPT in Photovoltaic System. In Proceedings of the 2021 18th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 22–25 March 2021. [Google Scholar] [CrossRef]
- Siddique, M.A.B.; Asad, A.; Asif, R.M.; Rehman, A.U.; Sadiq, M.T.; Ullah, I. Implementation of Incremental Conductance MPPT Algorithm with Integral Regulator by Using Boost Converter in Grid-Connected PV Array. IETE J. Res. 2021, 1–14. [Google Scholar] [CrossRef]
- Ali, M.N.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. An Efficient Fuzzy-Logic Based Variable-Step Incremental Conductance MPPT Method for Grid-Connected PV Systems. IEEE Access. 2021, 9, 26420–26430. [Google Scholar] [CrossRef]
- Baimel, D.; Tapuchi, S.; Levron, Y.; Belikov, J. Improved Fractional Open Circuit Voltage MPPT Methods for PV Systems. Electronics 2019, 8, 321. [Google Scholar] [CrossRef] [Green Version]
- Krishnan, M.M.; Bharath, K.R. A Novel Sensorless Hybrid MPPT Method Based on FOCV Measurement and P&O MPPT Technique for Solar PV Applications. In Proceedings of the 2019 International Conference on Advances in Computing and Communication Engineering (ICACCE), Sathyamangalam, India, 4–6 April 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Bharath, K.R.; Suresh, E. Design and Implementation of Improved Fractional Open Circuit Voltage Based Maximum Power Point Tracking Algorithm for Photovoltaic Applications. Intern. J. Renew. Energy Res. IJRER 2017, 7, 1108–1113. [Google Scholar]
- Fapi, C.B.N.; Wira, P.; Kamta, M. Real-Time Experimental Assessment of a New MPPT Algorithm Based on the Direct Detection of the Short-Circuit Current for a PV System. In Proceedings of the 19th International Conference on Renewable Energies and Power Quality (ICREPQ’21), Almeria, Spain, 28–30 July 2021; Volume 19, pp. 598–603. [Google Scholar] [CrossRef]
- Sher, H.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Chiaberge, M. An intelligent control strategy of fractional short circuit current maximum power point tracking technique for photovoltaic applications. J. Renew. Sustain. Energy 2015, 7, 013114. [Google Scholar] [CrossRef]
- Liu, Y.-H.; Huang, S.-C.; Huang, J.-W.; Liang, W.-C. A Particle Swarm Optimization-Based Maximum Power Point Tracking Algorithm for PV Systems Operating Under Partially Shaded Conditions. IEEE Trans. Energy Convers. 2012, 27, 1027–1035. [Google Scholar] [CrossRef]
- Koad, R.B.A.; Zobaa, A.; El-Shahat, A. A Novel MPPT Algorithm Based on Particle Swarm Optimization for Photovoltaic Systems. IEEE Trans. Sustain. Energy 2016, 8, 468–476. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the IEEE international conference on IEEE world congress on computational intelligence, evolutionary computation proceedings, IEEE, Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Xu, L.; Cheng, R.; Xia, Z.; Shen, Z. Improved Particle Swarm Optimization (PSO)-based MPPT Method for PV String under Partially Shading and Uniform Irradiance Condition. In Proceedings of the 2020 Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 29–31 May 2020. [Google Scholar] [CrossRef]
- Ratnaweera, A.; Halgamuge, S.; Watson, H.C. Self-Organizing Hierarchical Particle Swarm Optimizer With Time-Varying Acceleration Coefficients. IEEE Trans. Evol. Comput. 2004, 8, 240–255. [Google Scholar] [CrossRef]
- Chen, X.; Chai, Y.; Wang, Y. Application of Adaptive Particle Swarm Optimization in Multi-peak MPPT of Photovoltaic Array. In Proceedings of the IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020. [Google Scholar]
- Dorigo, M.; Stützle, T. Ant colony optimization: Overview and recent advances. In Handbook of Metaheuristics; Springer: Boston, MA, USA, 2019; pp. 311–351. [Google Scholar]
- Kumar, P.M.U.; Devi, G.D.; Manogaran, G.; Sundarasekar, R.; Chilamkurti, N.; Varatharajan, R. Ant colony optimization algorithm with internet of vehicles for intelligent traffic control system. Comput. Netw. 2018, 144, 154–162. [Google Scholar] [CrossRef]
- Jiang, L.L.; Maskell, D.L.; Patra, J. A novel ant colony optimization-based maximum power point tracking for photovoltaic systems under partially shaded conditions. Energy Build. 2013, 58, 227–236. [Google Scholar] [CrossRef]
- Phanden, R.K.; Sharma, L.; Chhabra, J.; Demir, H.I. A novel modified ant colony optimization based maximum power point tracking controller for photovoltaic systems. Mater. Today Proc. 2020, 38, 38–93. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Benyoucef, S.; Chouder, A.; Kara, K.; Sahed, Q.A.; Silvestre, S. Artificial bee colony based algorithm for maximum power point tracking (MPPT) for PV systems operating under partial shade. Appl. Soft Comput. 2015, 32, 38–48. [Google Scholar] [CrossRef] [Green Version]
- Mohapatra, A.; Nayak, B.; Das, P.; Mohanty, K.B. A review on MPPT techniques of PV system under partial shading condition. Renew. Sustain. Energy Rev. 2017, 80, 854–867. [Google Scholar] [CrossRef]
- Okula, Ş.; Aksub, D.; Orman, Z. Investigation of Artificial Intelligence Based Optimization Algorithms. J. Istanb. Sabahattin Zaim Univ. Nat. Sci. Inst. 2019, 1, 11–16. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2018, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Eltamaly, A.M.; Farh, H.M. Dynamic global maximum power point tracking of the PV systems under variant partial shading using hybrid GWO-FLC. Sol. Energy 2018, 177, 306–316. [Google Scholar] [CrossRef]
- Jayaudhayal, J.; Rajasekaran, D.; Sumithra, J.; Vinitha, J.C.; Karkuzhali, S. Closed Loop Control of PV System Using Grey Wolf Optimization Algorithm under Partial Shading Condition. In Proceedings of the International Conference on Recent Developments in Robotics, Embedded and Internet of Things (ICRDREIOT), Tamil Nadu, India, 16–17 October 2020. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumara, V. Emperor penguin optimizer: A bio-inspired algorithm for engineering problems. Knowledge-Based Syst. 2018, 159, 20–50. [Google Scholar] [CrossRef]
- Sameh, M.A.; Marei, M.I.; Badr, M.A.; Attia, M.A. An Optimized PV Control System Based on the Emperor Penguin Optimizer. Energies 2021, 14, 751. [Google Scholar] [CrossRef]
- Faris, H.; Mirjalili, S.; Aljarah, I.; Mafarja, M.; Heidari, A.A. Salp Swarm Algorithm: Theory, Literature Review, and Application in Extreme Learning Machines. Springer Ser. Fluoresc. 2019, 185–199. [Google Scholar] [CrossRef]
- Patnana, N.; Pattnaik, S.; Varshney, T.; Singh, V.P. Self-Learning Salp Swarm Optimization Based PID Design of Doha RO Plant. Algorithms 2020, 13, 287. [Google Scholar] [CrossRef]
- Huang, C.; Zhang, Z.; Wang, L.; Song, Z.; Long, H. A novel global maximum power point tracking method for PV system using Jaya algorithm. In Proceedings of the IEEE Conference on Energy Internet and Energy System Integration, Beijing, China, 26–28 November 2017. [Google Scholar]
- Zitar, R.A.; Al-Betar, M.A.; Awadallah, M.A.; Doush, I.A.; Assaleh, K. An Intensive and Comprehensive Overview of JAYA Algorithm, its Versions and Applications. Springer Arch. Comput. Methods Eng. 2021. [Google Scholar] [CrossRef]
- Zaghba, L.; Khennane, M.; Borni, A.; Fezzani, A. Intelligent PSO-Fuzzy MPPT approach for Stand Alone PV System under Real Outdoor Weather Conditions. Alger. J. Renew. Energy Sustain. Dev. 2021, 3, 1–12. [Google Scholar]
- El Hariz, Z.; Hicham, A.; Mohammed, D. A novel optimiser of MPPT by using PSO-AG and PID controller. Int. J. Ambient. Energy 2021. [Google Scholar] [CrossRef]
- Krishnan, G.; Kinattingal, S.; Simon, S.P.; Srinivasa, P.; Nayak, R. MPPT in PV systems using ant colony optimization with dwindling population. IET Renew. Power Gener. 2020, 14, 1105–1112. [Google Scholar] [CrossRef]
- Rajalashmi, C.K.; Monisha, C. Maximum Power Point Tracking Using Ant Colony Optimization for Photovoltaic System Under Partially Shaded Conditions. Int. J. Eng. Adv. Technol. IJEAT 2018, 8, 82–87. [Google Scholar]
- Gonzalez-Castano, C.; Restrepo, C.; Kouro, S.; Rodriguez, J. MPPT Algorithm Based on Artificial Bee Colony for PV System. IEEE Access 2021, 9, 43121–43133. [Google Scholar] [CrossRef]
- Fanani, M.R.; Sudiharto, I.; Ferdiansyah, I. Implementation of Maximum Power Point Tracking on PV System using Artificial Bee Colony Algorithm. In Proceedings of the 2020 3rd International Seminar on Research of Information Technology and Intelligent Systems (ISRITI), Yogyakarta, Indonesia, 10 December 2020; pp. 117–122. [Google Scholar] [CrossRef]
- Hasan, F.R.; Prasetyono, E.; Sunarno, E. A Modified Maximum Power Point Tracking Algorithm Using Grey Wolf Optimization for Constant Power Generation of Photovoltaic System. In Proceedings of the 2021 International Conference on Artificial Intelligence and Mechatronics Systems (AIMS), Bandung, Indonesia, 28–30 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Jamaludin, M.N.I. An Effective Salp Swarm Based MPPT for Photovoltaic Systems Under Dynamic and Partial Shading Conditions. IEEE Access 2021, 9, 34570–34589. [Google Scholar] [CrossRef]
- Mirza, A.F.; Mansoor, M.; Ling, Q.; Yin, B.; Javed, M.Y. A Salp-Swarm Optimization based MPPT technique for harvesting maximum energy from PV systems under partial shading conditions. Energy Convers. Manag. 2020, 209, 112625. [Google Scholar] [CrossRef]
- Deboucha, H.; Mekhilef, S.; Belaid, S.; Guichi, A. Modified deterministic Jaya (DM-Jaya)-based MPPT algorithm under partially shaded conditions for PV system. IET Power Electron. 2020, 13, 4625–4632. [Google Scholar] [CrossRef]
- Yang, X.; Deb, S. Cuckoo Search via Lévy flights. In Proceedings of the World Congress Nature Biol. Inspired Comput. (NaBIC), Coimbatore, India, 9–11 December2009; pp. 210–214. [Google Scholar]
- Anand, R.; Swaroop, D.; Kumar, B. Global Maximum Power Point Tracking for PV Array under Partial Shading using Cuckoo Search. In Proceedings of the IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020. [Google Scholar]
- Shlesinger, M.F. Search Research. J. Nat. 2006, 443, 281–282. [Google Scholar] [CrossRef]
- Mosaad, M.I.; Raouf, M.O.A.; Al-Ahmar, M.A.; Banakher, F.A. Maximum Power Point Tracking of PV system Based Cuckoo Search Algorithm; review and comparison. Energy Procedia 2018, 162, 117–126. [Google Scholar] [CrossRef]
- Ahmed, N.A.; Rahman, S.A.; Alajmi, B.N. Optimal controller tuning for P&O maximum power point tracking of PV systems using genetic and cuckoo search algorithms. Int. Trans. Electr. Energy Syst. 2020. [Google Scholar] [CrossRef]
- Singh, N.; Gupta, K.K.; Jain, S.K.; Dewangan, N.K.; Bhatnagar, P. A Flying Squirrel Search Optimization for MPPT Under Partial Shaded Photovoltaic System. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4963–4978. [Google Scholar] [CrossRef]
- Jain, M.; Singh, V.; Rani, A. A novel nature-inspired algorithm for optimization: Squirrel search algorithm. Swarm Evol. Comput. 2019, 44, 148–175. [Google Scholar] [CrossRef]
- Farhan, A.F.; Feilat, E.A.; Al-Salaymeh, A.S. Maximum Power Point Tracking Technique Using Combined Perturb & Observe and Owl Search Algorithms. In Proceedings of the International Conference on Electrical and Computing Technologies and Applications (ICECTA), Ras Al Khaimah, United Arab Emirates, 19–21 November 2019. [Google Scholar]
- Jain, M.; Maurya, S.; Rani, A.; Singh, V. Owl search algorithm: A novel nature-inspired heuristic paradigm for global optimization. J. Intell. Fuzzy Syst. 2018, 34, 1573–1582. [Google Scholar] [CrossRef]
- Palupi, L.N.; Winarno, T.; Pracoyo, A.; Ardhenta, L. Adaptive voltage control for MPPT-firefly algorithm output in PV system. IOP Conf. Series: Mater. Sci. Eng. 2020, 732, 012048. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Quynh, N.V.; Van Dai, L. Improved Firefly Algorithm: A Novel Method for Optimal Operation of Thermal Generating Units. Complexity 2018, 2018, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Akram, S.; Khalil, L.; Bhatti, M.L.; Aftab, T.; Siddique, R.; Riaz, M. Maximum Power Point Tracking using Direct Control with Cuckoo Search for Photovoltaic Module under Partial Shading Condition. Pak. J. Eng. Technol. 2021, 4, 28–31. [Google Scholar] [CrossRef]
- Raj, A.; Gupta, M. Numerical Simulation and Comparative Assessment of Improved Cuckoo Search and PSO based MPPT System for Solar Photovoltaic System Under Partial Shading Condition. Turk. J. Comput. Math. Educ. 2021, 12, 3842–3855. [Google Scholar]
- Altamimi, S.N.; Feilat, E.A.; al Nadi, D.A. Maximum Power Point Tracking Technique Using Combined Incremental Conductance and Owl Search Algorithm. In Proceedings of the 2021 12th International Renewable Engineering Conference (IREC), Amman, Jordan, 14–15 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, Z.; Wei, L. An Immune Firefly Algorithm for Tracking the Maximum Power Point of PV Array under Partial Shading Conditions. Energies 2019, 12, 3083. [Google Scholar] [CrossRef] [Green Version]
- Farzaneh, J.; Keypour, R.; Khanesar, M.A. A New Maximum Power Point Tracking Based on Modified Firefly Algorithm for PV System Under Partial Shading Conditions. Technol. Econ. Smart Grids Sustain. Energy 2018, 3, 9. [Google Scholar] [CrossRef] [Green Version]
- Al-Majidi, S.D.; Abbod, M.F.; Al-Raweshidy, H.S. A novel maximum power point tracking technique based on fuzzy logic for photovoltaic systems. Int. J. Hydrogen Energy 2018, 43, 14158–14171. [Google Scholar] [CrossRef]
- Issaadi, W.; Mazouzi, M.; Issaadi, S. Command of a Photovoltaic System by Artificial Intelligence, Comparative Studies with Conventional Controls: Results, Improvements, and Perspectives. In Proceedings of the 8th Proceedings of International Conference on Modelling, Identification and Control (ICMIC), Algiers, Algeria, 15–17 November 2017; pp. 583–591. [Google Scholar]
- Mehra, S.; Sharma, R. Performance Analysis of Artificial Intelligence Based MPPT Techniques for a Solar System under Changing Environmental Conditions. In Proceedings of the International Conference on Advances in Electronics, Electrical, and Computational Intelligence (ICAEECA), Allahabad, India, 31 May–1 June 2019. [Google Scholar] [CrossRef]
- Roy, R.B.; Cros, J.; Nandi, A.; Ahmed, T. Maximum Power Tracking by Neural Network. In Proceedings of the 8th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), Noida, India, 4–5 June 2020. [Google Scholar]
- Algarín, C.R.; Hernández, D.S.; Leal, D.R. A Low-Cost Maximum Power Point Tracking System Based on Neural Network Inverse Model Controller. Electronics 2018, 7, 4. [Google Scholar] [CrossRef] [Green Version]
- Al-Majidi, S.D.; Abbod, M.F.; Al-Raweshidy, H.S. Design of an intelligent MPPT based on ANN using a real photovoltaic system data. In Proceedings of the 54th International Universities Power Engineering Conference (UPEC), Bucharest, Romania, 3–6 September 2019; pp. 1–6. [Google Scholar]
- Revathy, S.R.; Kirubakaran, V. A critical review of artificial neural networks based maximum power point tracking techniques. J. Crit.Rev. 2020, 7, 2394–5125. [Google Scholar]
- Mirza, A.F.; Mansoor, M.; Ling, Q.; Khan, M.I.; Aldossary, O.M. Advanced Variable Step Size Incremental Conductance MPPT for a Standalone PV System Utilizing a GA-Tuned PID Controller. Energies 2020, 13, 4153. [Google Scholar] [CrossRef]
- Megantoro, P.; Nugroho, Y.D.; Anggara, F.; Pakha, A.; Pramudita, B.A. The Implementation of Genetic Algorithm to MPPT Technique in a DC/DC Buck Converter under Partial Shading Condition. In Proceedings of the 3rd International Conference on Information Technology, Information Systems and Electrical Engineering (ICITISEE), Yogyakarta, Indonesia, 13–14 November 2018. [Google Scholar]
- Storn, R.; Price, K. Minimizing the real functions of the ICEC’96 contest by differential evolution. In Proceedings of the IEEE International Conference on Evolutionary Computation (ICEC’96), Nagoya, Japan, 20–22 May 1996; pp. 842–844. [Google Scholar]
- Sutikno, T.; Subrata, A.C.; Elkhateb, A. Evaluation of Fuzzy Membership Function Effects for Maximum Power Point Tracking Technique of Photovoltaic System. IEEE Access 2021, 9, 109157–109165. [Google Scholar] [CrossRef]
- Abdellatif, W.S.E.; Mohamed, M.S.; Barakat, S.; Brisha, A. A Fuzzy Logic Controller Based MPPT Technique for Photovoltaic Generation System. Intern. J. Electr. Eng. Inform. 2021, 13. [Google Scholar] [CrossRef]
- Azad, M.L.; Das, S.; Sadhu, P.K.; Arvind, P. High-Performance Algorithms to Ascertain The Power Generation In A Photovoltaic System Using Fuzzy Logic Controller. In Proceedings of the 2020 International Conference on Intelligent Engineering and Management (ICIEM), London, UK, 17–19 June 2020; pp. 425–430. [Google Scholar] [CrossRef]
- Raj, A.; Gupta, M. Numerical Simulation and Performance Assessment of ANN-INC Improved Maximum Power Point Tracking System for Solar Photovoltaic System Under Changing Irradiation Operation. Ann. RSCB 2021, 25, 790–797. [Google Scholar]
- Khan, A.I.; Khan, R.A.; Farooqui, S.A.; Sarfraz, M. Artificial Neural Network-Based Maximum Power Point Tracking Method with the Improved Effectiveness of Standalone Photovoltaic System. In AI and Machine Learning Paradigms for Health Monitoring System: Intelligent Data Analytics; Malik, H., Fatema, N.A.J., Eds.; Springer: Singapore, 2021; Volume 86, pp. 459–470. [Google Scholar]
- Ali, M.N.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Promising MPPT Methods Combining Metaheuristic, Fuzzy-Logic and ANN Techniques for Grid-Connected Photovoltaic. Sensors 2021, 21, 1244. [Google Scholar] [CrossRef]
- Jamaiti, M. Modeling of Maximum Solar Power Tracking by Genetic Algorithm Method. Iran. J. Energy Environ. IJEE 2021, 12, 118–124. [Google Scholar]
- Chao, K.-H.; Rizal, M. A Hybrid MPPT Controller Based on the Genetic Algorithm and Ant Colony Optimization for Photovoltaic Systems under Partially Shaded Conditions. Energies 2021, 14, 2902. [Google Scholar] [CrossRef]
- Alayi, R.; Harasii, H.; Pourderogar, H. Modeling and optimization of photovoltaic cells with GA algorithm. J. Robot Control. JRC 2020, 2, 35–41. [Google Scholar] [CrossRef]
- Ahmad, M.S.; Ahmad, A. Hybrid PSO-DE Technique to Optimize Energy Resource for PV System. Int. J. Electr. Eng. Technol. IJEET 2021, 12, 128–139. [Google Scholar]
- Babu, K.G.; Kishori, K.R. MPPT design using grey wolf optimization differential evolution (GWODE) technique for partially shaded PV system. Int. J. Emerg. Technol. Innov. Res. 2018, 5, 203–218. [Google Scholar]
- Tey, K.S.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B.; Oo, A.M.T.; Stojcevski, A. Improved Differential Evolution-Based MPPT Algorithm Using SEPIC for PV Systems Under Partial Shading Conditions and Load Variation. IEEE Trans. Ind. Inform. 2018, 14, 4322–4333. [Google Scholar] [CrossRef]




































| Classification | MPPT Techniques | Advantages | Disadvantages | Applications | Commercial Products |
|---|---|---|---|---|---|
| Conventional | Perturb and observe (P&O) | Straight-forward design; ease in execution; and work for both grid-connected and stand-alone systems | Less efficient; oscillates around MPP during steady-state | Stand-alone | Genasun GV Boost charge controller with MPPT |
| Incremental conductance (INC) | Good performance during fast-changing weather circumstances; and good noise rejection | Implementation is complex; needs a high computational capacity | Stand-alone | - | |
| Fractional open-circuit voltage (FOCV) | Simplicity; utilizes only one feedback loop | Power loss due to interrupted system operation when the entire control range is scanned | Stand-alone | - | |
| Fractional short-circuit current (FSCC) | One feedback loop is employed; and easy computation | Less efficient; short-circuit current proportionality factor varies with the PV module parameters | Stand-alone | - | |
| Metaheuristic | Particle swarm optimization (PSO) | Fast computational capability; MPP location for any sort of P–V curve regardless of the environmental conditions can be easily located; good dynamic response; and reliable | Slow tracking speed; and initial parameters need to be selected carefully | Grid-connected | Morningstar-Trackstar MPPT charge controller, Solar Electric Supply (USA) |
| Ant colony optimization (ACO) | Convergence independent of initial conditions, and convergence rate is fast | Difficult Implementation | Grid-connected | Morningstar SS-MPPT-15L SunSaver 15 Amp MPPT Solar Charge Controller. | |
| Artificial bee colony (ABC) | Independent of the initial condition; Fewer control constraints; and a high tracking speed | Complex Implementation | Grid-connected | Morningstar SG-4 SunGuard 4.5 Amp PWM Charge Controller 12 V. | |
| Cuckoo search (CS) | High efficiency and fewer tuning parameters | Unspecified parameters | Grid-connected | - | |
| Grey wolf optimization (GWO) | Highly efficient, transient oscillation elimination, and fast | Initialization is complex; more unknown constraints | Grid-connected | - | |
| Flying squirrel search algorithm (FSSA) | Faster convergence, Highly efficient, system-independent | When climatic conditions change; re-initialization is needed to search for the new GMPP | Grid-connected | - | |
| Emperor penguin optimization (EPO) | It can be employed to optimize the parameters of other algorithms. | Initialization dependent | Grid-connected | - | |
| Salp swarm algorithm (SSA) | Highly efficient; fast; highly accurate | Computational burden | Grid-connected | - | |
| Jaya Algorithm (JA) | Free from strategyspecific parameters; single learning phase; few control parameters | Random numbers could lead to negative solutions | Grid-connected | - | |
| Owl search algorithm (OSA) | Simple computation; can be used to optimize other method parameters | Initialization dependent | Grid-connected | - | |
| Firefly algorithm (FFA) | Easy computational steps; can be implemented using low-cost microcontrollers | The position of each firefly varies in a stepwise manner | Grid-connected | - | |
| Artificial Intelligence | Fuzzy logic control (FLC) | A precise mathematical model is not required, good for time-varying, non-linear systems, and systems lacking proper models | Hardware implementation cost is high | Grid-connected | Morning star-Trackstar MPPT charge controller, Solar Electric Supply, USA |
| Artificial neural network (ANN) | Good dynamic performance, fast; tracking accuracy is good; no need to be re-programmed | Small steady-state oscillation; require other algorithms for neural training; periodic tuning required | Grid-connected | Morning star-Trackstar MPPT charge controller, Solar Electric Supply, USA | |
| Genetic algorithm (GA) | It can be utilized for optimizing parameters of other algorithms such asFLC | Hardware required for its implementation is costly | Grid-connected | - | |
| Differential evolution (DE) | Convergence independent of initial conditions; and fast convergence | Optimal solution not guaranteed | Grid-connected | - |
| Algorithm Category | MPPT Algorithm | Complexity of Algorithm | Cost of Implementation | Tracking Speed | Tracking Accuracy | Analog/Digital | Sensed Parameters | Steady-State Oscillation | PV Array Dependency |
|---|---|---|---|---|---|---|---|---|---|
| Conventional | P&O | S | AFF | Slow | L | A/D | V, I | La | N |
| INC | M | EX | Moderate | M | D | V, I | M | N | |
| FOCV | S | INEX | Fast | L | A/D | V | La | Y | |
| FSCC | M | INEX | Fast | L | A/D | I | M | Y | |
| Meta-heuristic | PSO | M | AFF | Moderate | M | A/D | V, I | Var. | N |
| ACO | S | INEX | Fast | M | D | V, I | ̴ Z | N | |
| ABC | M-C | EX | Fast | M | D | V, I | ̴ Z | N | |
| CS | S-M | EX | V. Fast | H | D | V, I | ̴ Z | N | |
| GWO | S | AFF | Moderate | H | D | V, I | ̴ Z | N | |
| FSSO | M | EX | Fast | H | D | V, I | ̴ Z | N | |
| EPO | C | INEX | Fast | H | - | Du, T | - | N | |
| SSA | S | AFF | V. Fast | H | D | V, I | ̴ Z | N | |
| JA | S | INEX | V. Fast | H | D | V | ̴ Z | N | |
| OSA | S | INEX | Fast | H | - | - | ̴ Z | N | |
| FFA | S | AFF | Moderate | H | D | V, I | ̴ Z | N | |
| Artificial Intelligence | FLC | C | AFF | Fast | V. H | D | Var. | ̴ Z | Y |
| ANN | M-C | EX | Moderate | V. H | D | Var. | ̴ Z | Y | |
| GA | C | EX | Moderate | M-H | D | Var. | ̴ Z | N | |
| DE | M | AFF | Moderate | M-H | D | V, I | ̴ Z | N |
| Parameter | Value |
|---|---|
| Number of PV module | 4 |
| Maximum Power (PMPP) | 35.97 W |
| Cells per module (Ncell) | 36 |
| Open circuit voltage (Voc) | 21.4 V |
| Short-circuit current (Isc) | 2.3 A |
| Voltage at MPP (VMPP) | 16.5 V |
| Current at MPP (IMPP) | 2.18 A |
| Temperature coefficient of Voc | −0.76 (%/°C) |
| Temperature coefficient of Isc | 0.7 (%/°C) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Verma, P.; Alam, A.; Sarwar, A.; Tariq, M.; Vahedi, H.; Gupta, D.; Ahmad, S.; Shah Noor Mohamed, A. Meta-Heuristic Optimization Techniques Used for Maximum Power Point Tracking in Solar PV System. Electronics 2021, 10, 2419. https://doi.org/10.3390/electronics10192419
Verma P, Alam A, Sarwar A, Tariq M, Vahedi H, Gupta D, Ahmad S, Shah Noor Mohamed A. Meta-Heuristic Optimization Techniques Used for Maximum Power Point Tracking in Solar PV System. Electronics. 2021; 10(19):2419. https://doi.org/10.3390/electronics10192419
Chicago/Turabian StyleVerma, Preeti, Afroz Alam, Adil Sarwar, Mohd Tariq, Hani Vahedi, Deeksha Gupta, Shafiq Ahmad, and Adamali Shah Noor Mohamed. 2021. "Meta-Heuristic Optimization Techniques Used for Maximum Power Point Tracking in Solar PV System" Electronics 10, no. 19: 2419. https://doi.org/10.3390/electronics10192419