
Modified Variable Step-Size Incremental Conductance MPPT Technique for Photovoltaic Systems



Abstract
:1. Introduction
2. Conventional Variable Step-Size INC Algorithm
2.1. Conventional INC Algorithm
2.2. Conventional Variable Step-Size Algorithm
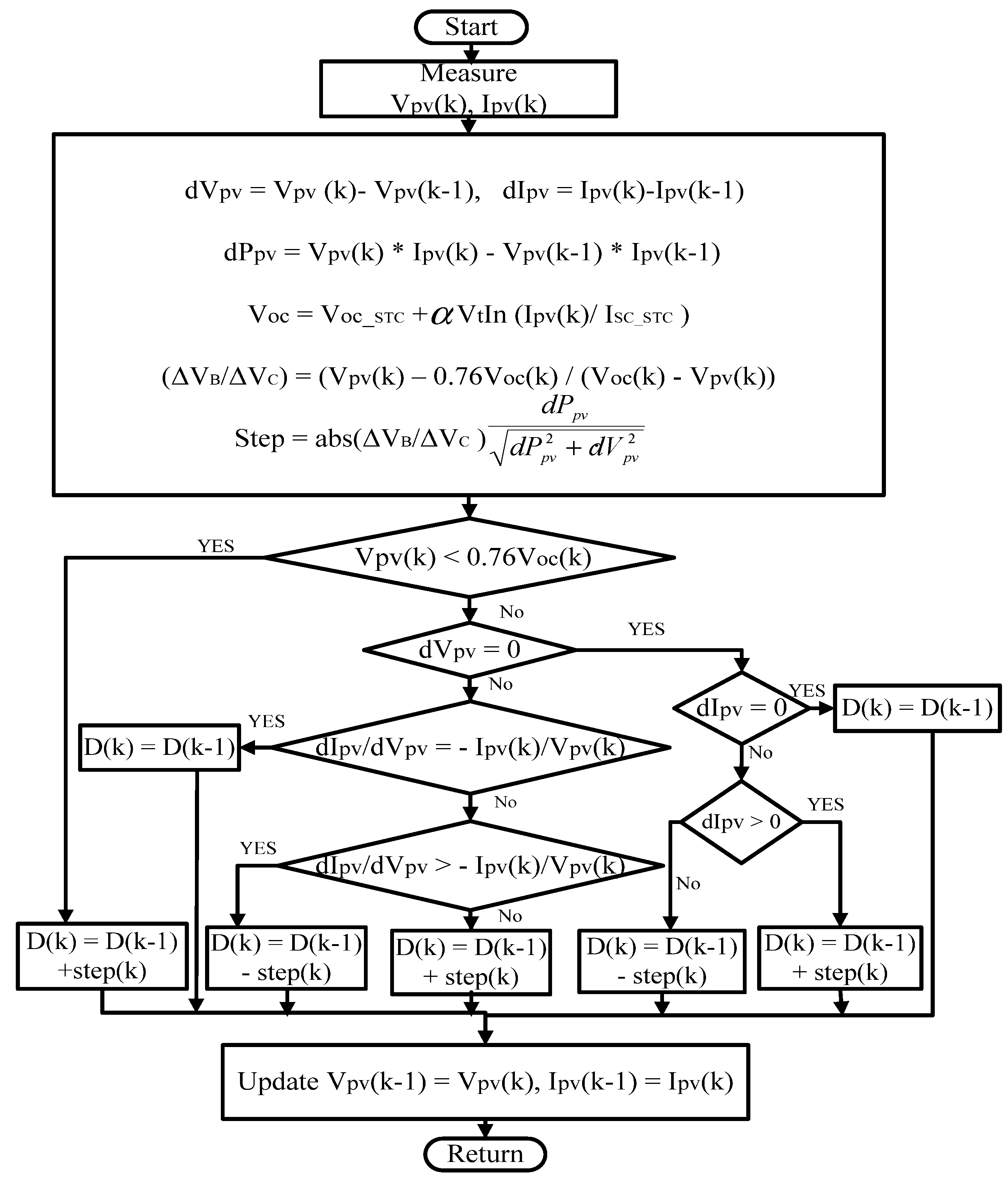
3. Proposed Variable Step-Size INC Algorithm
3.1. Proposed Autonomous Scaling Factor
3.2. Estimation of Voc
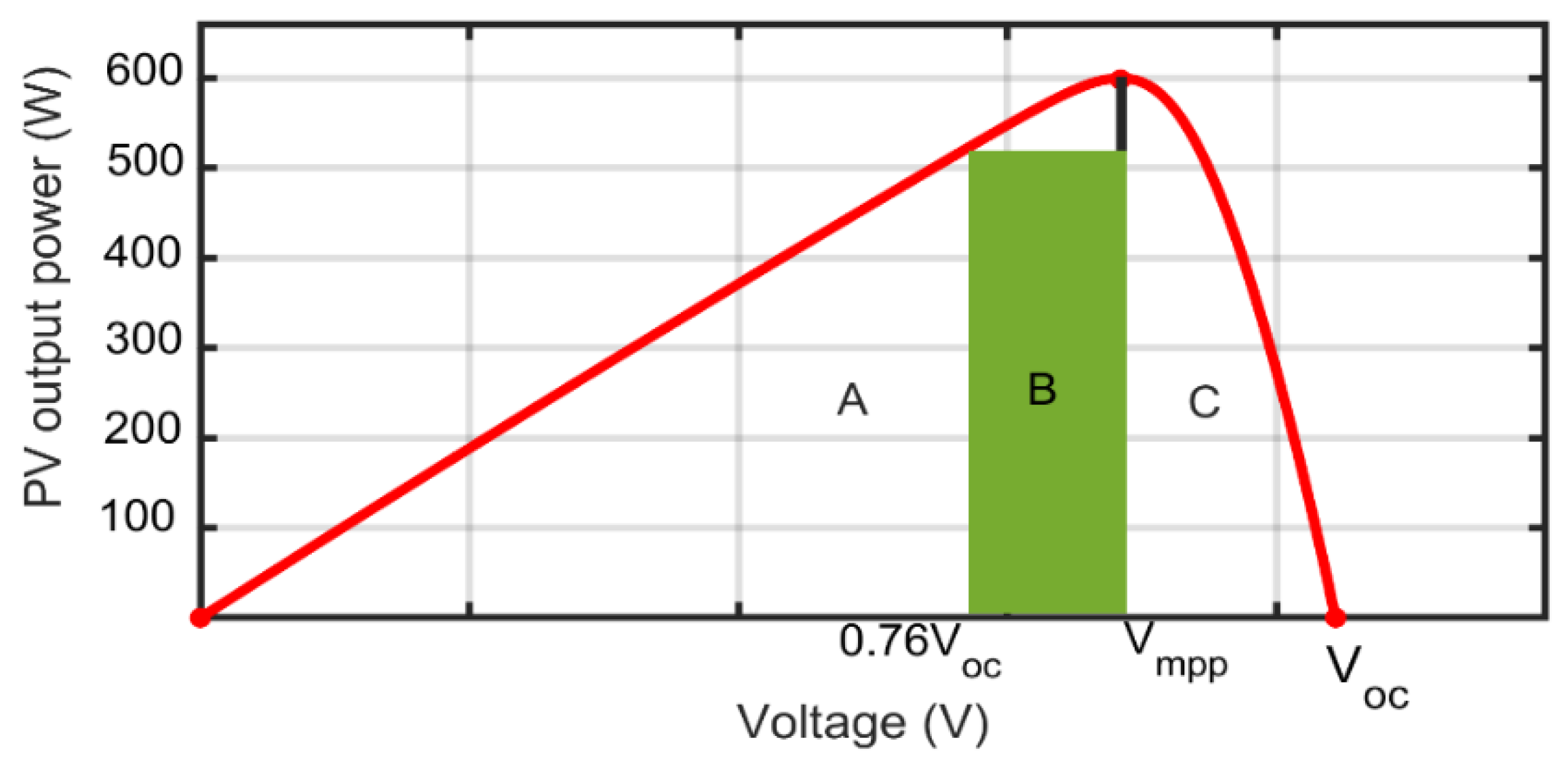
3.3. Slope Angle Variation Algorithm
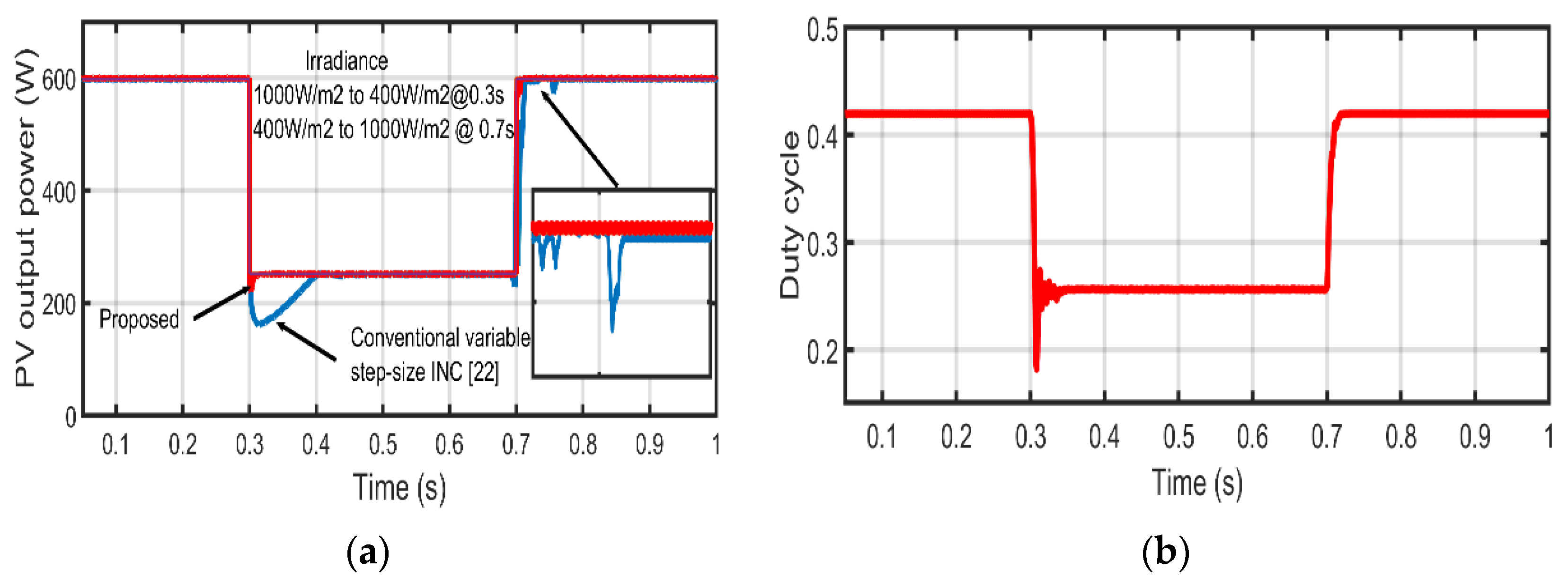
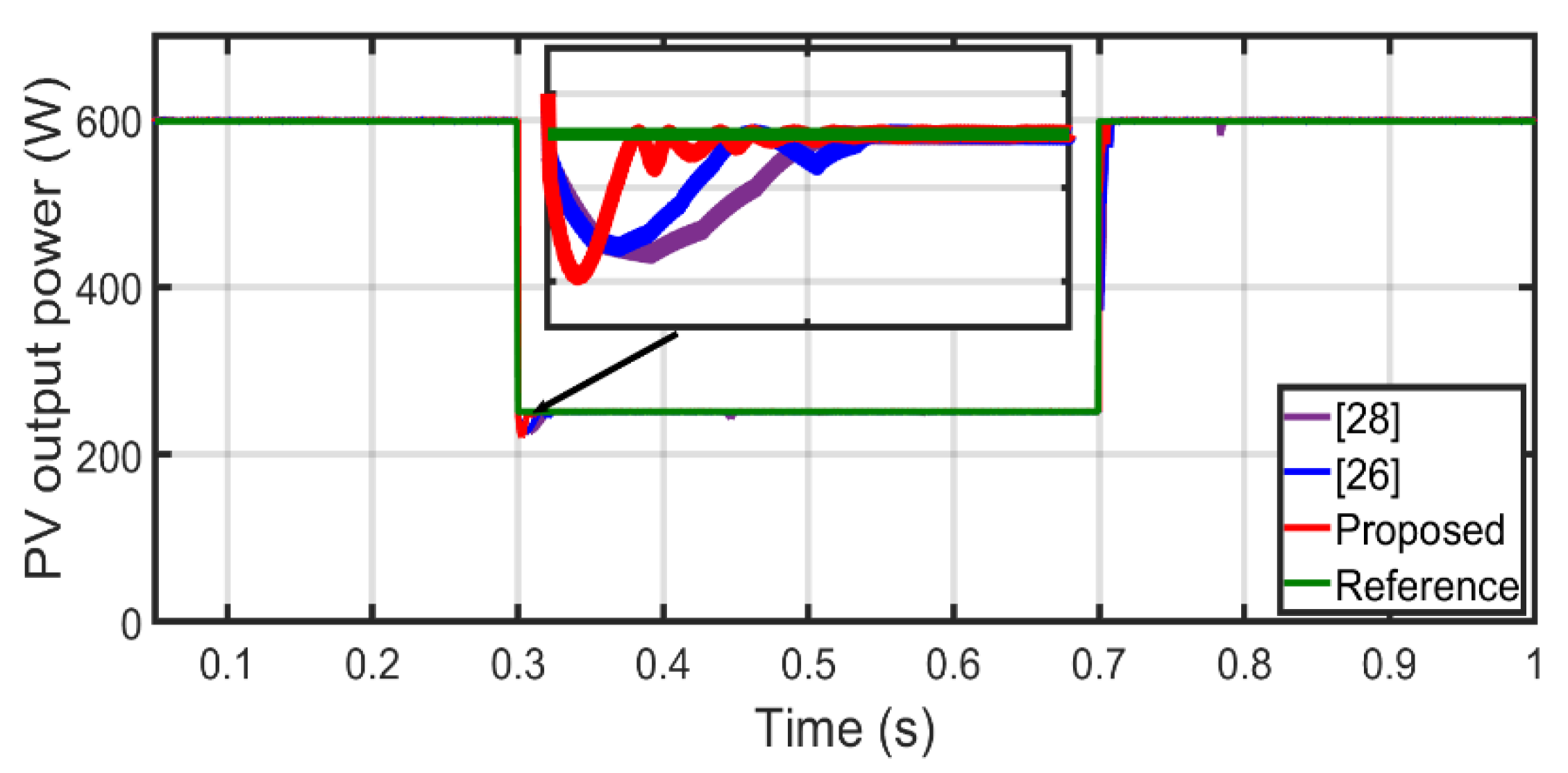
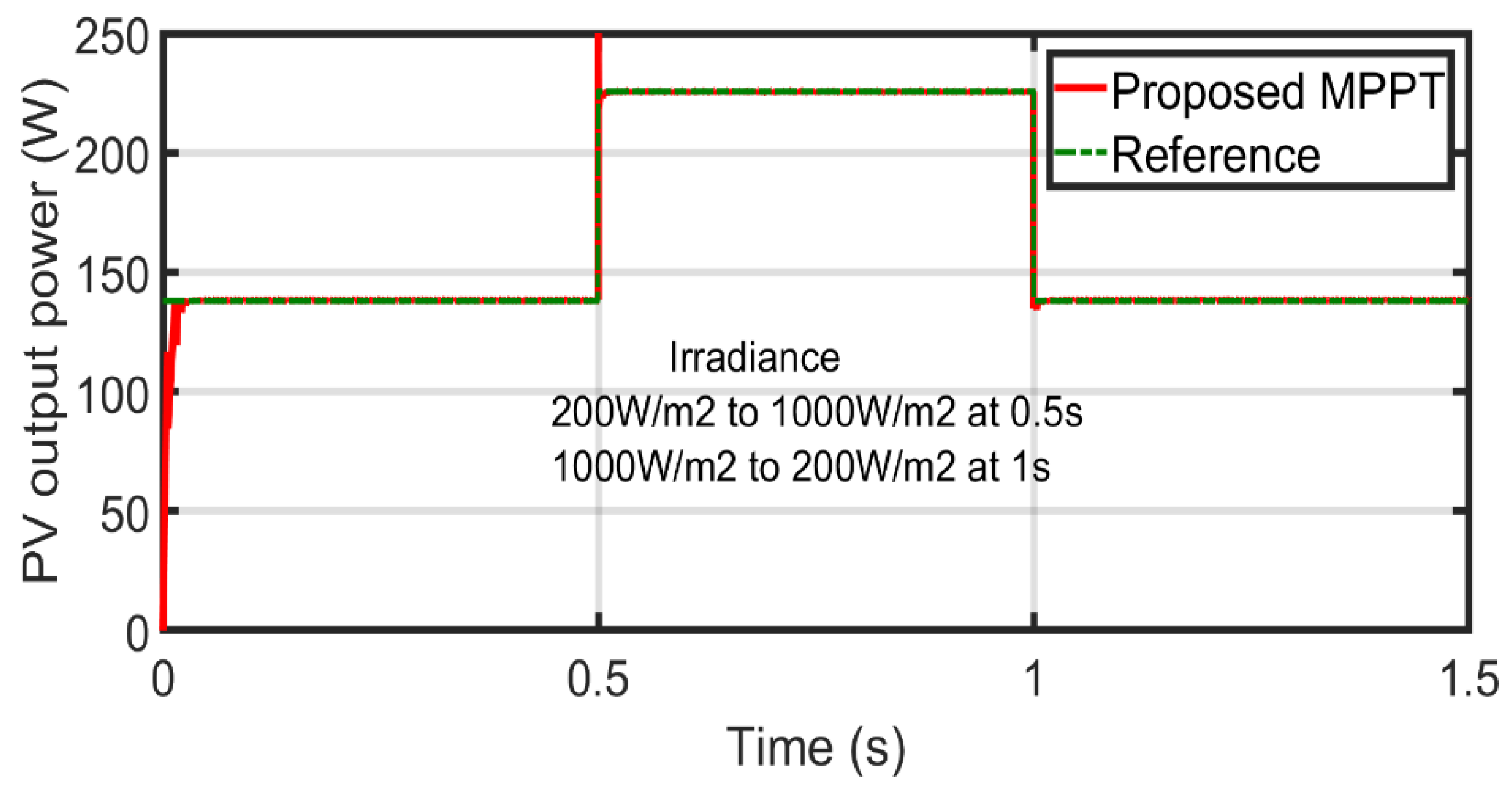
4. Simulation Results
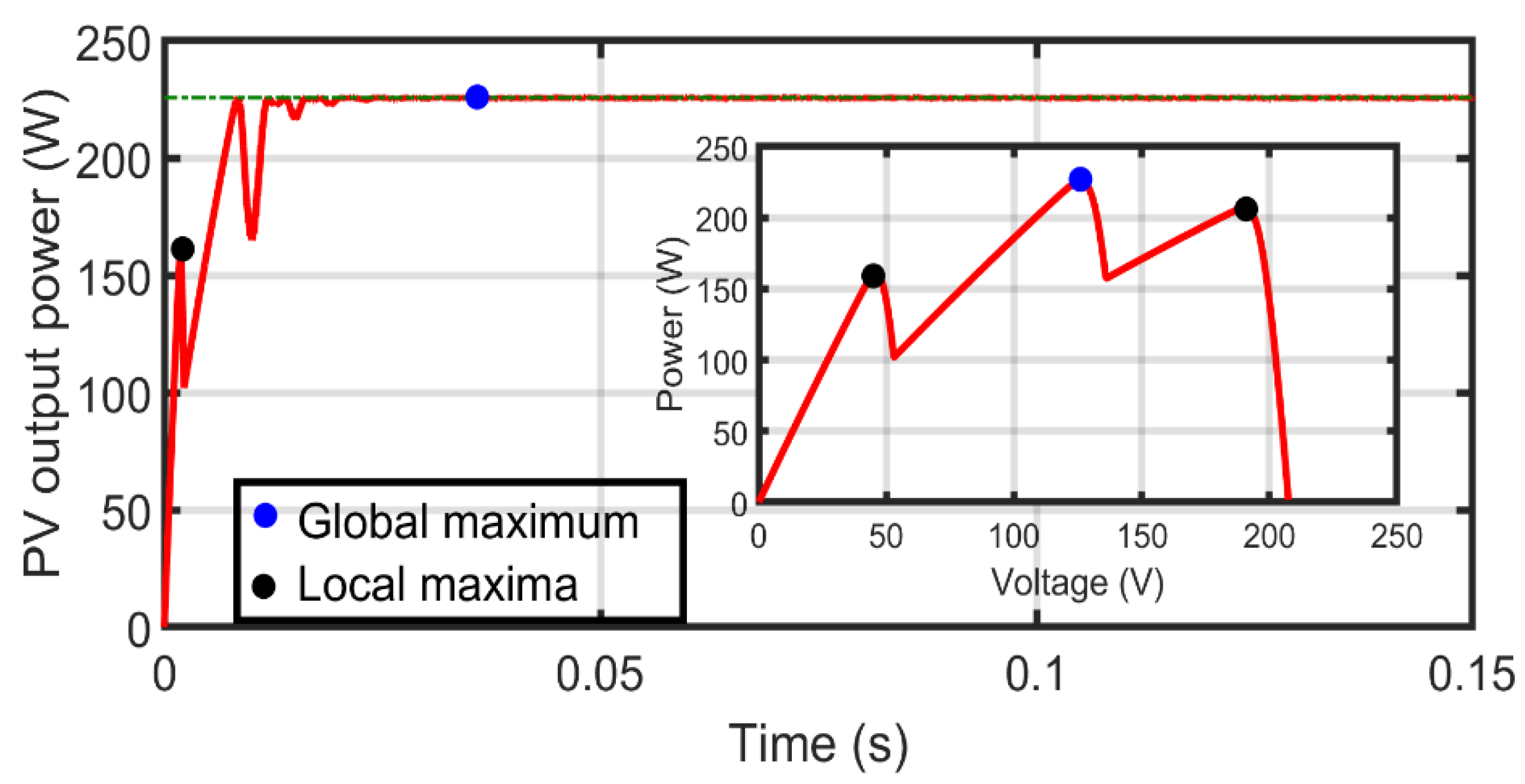
5. Partial Shading Analysis of the Proposed MPPT
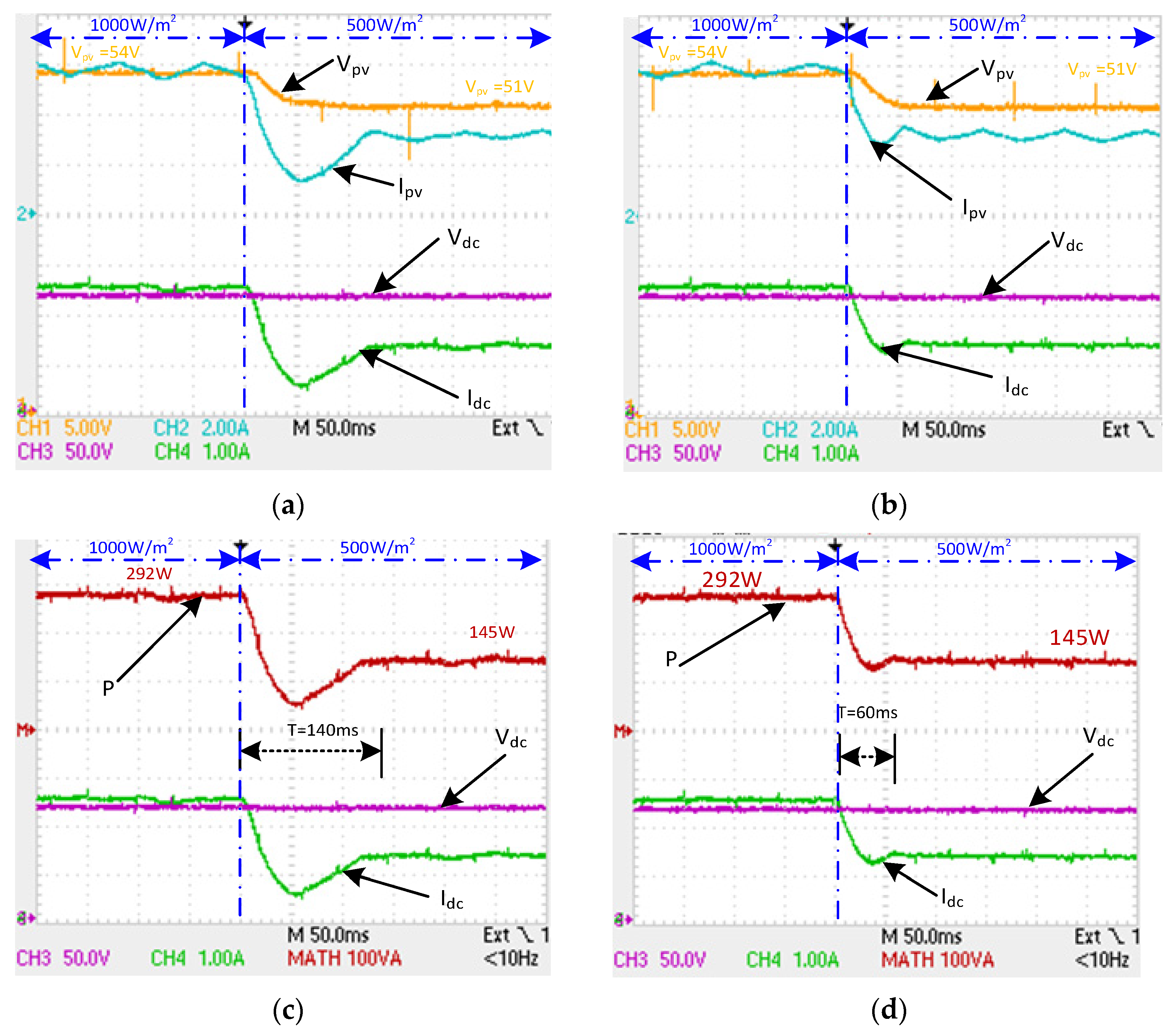
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| D | Duty cycle |
| FOCV | Fractional open circuit voltage |
| FSCC | Fractional short circuit current |
| G | Irradiance |
| INC | Incremental conductance |
| Impp | Current at maximum power point |
| Isc | Shot circuit current |
| MPP | Maximum power point |
| MPPT | Maximum power point tracking |
| P&O | Perturb and observe |
| PV | Photovoltaic |
| P-V | Power-voltage |
| STC | Standard test conditions |
| Voc | Open circuit voltage |
| Vmpp | Voltage at maximum power point |
References
- Seyedmahmoudian, M.; Horan, B.; Soo, T.K.; Rahmani, R.; Oo, A.M.T.; Mekehilef, S.; Stojcevski, A. State of the art artificial intelligence-based MPPT techniques for mitigating partial shading effects on PV systems—A review. Renew. Sustain. Rev. 2016, 64, 435–455. [Google Scholar] [CrossRef]
- Aquib, M.; Jain, S.; Agarwal, V. A Time-Based Global Maximum Power Point Tracking Technique for PV System. IEEE Trans. Power Electron. 2020, 35, 393–402. [Google Scholar] [CrossRef]
- Haque, M.E.; Lyden, S. Maximum Power Point Tracking techniques for photovoltaic systems: A comprehensive review and comparative analysis. Renew. Sustain. Rev. 2015, 52, 1504–1518. [Google Scholar]
- Ibrahim, A.; Shafik, M.B.; Ding, M.; Sarhan, M.A.; Fang, Z.; Ahmed, G. PV maximum power-point tracking using modified particle swarm optimization under partial shading conditions. Chin. J. Elect. Eng. 2020, 6, 106–121. [Google Scholar] [CrossRef]
- Selvakumar, S.; Madhusmita, M.; Koodalsamy, C.; Simon, S.P.; Sood, Y.R. High-Speed Maximum Power Point Tracking Module for PV Systems. IEEE Trans. Ind. Electron. 2019, 66, 1119–1129. [Google Scholar] [CrossRef]
- Sher, H.A.; Addoweesh, K.E.; Al-Haddad, K. An Efficient and Cost-Effective Hybrid MPPT Method for a Photovoltaic Flyback Microinverter. IEEE Trans. Sustain. Energy 2018, 9, 1137–1144. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Hsu, P.; Hella, M.M. A Thermal/RF Hybrid Energy Harvesting System with Rectifying-Combination and Improved Fractional-OCV MPPT Method. IEEE Trans. Circt. Systs. 2020, 67, 3352–3363. [Google Scholar] [CrossRef]
- Uprety, S.; Lee, H. A 0.65-mW-to-1-W Photovoltaic Energy Harvester with Irradiance-Aware Auto-Configurable Hybrid MPPT Achieving >95% MPPT Efficiency and 2.9-ms FOCV Transient Time. IEEE J. Solid-State Circuits 2021, 56, 1827–1836. [Google Scholar] [CrossRef]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Al-Haddad, K.; Chiaberge, M. A New Sensorless Hybrid MPPT Algorithm Based on Fractional Short-Circuit Current Measurement and P&O MPPT. IEEE Trans. Sustain. Energy 2015, 6, 1426–1434. [Google Scholar]
- Ali, R.R.; Mohammad, M.; Shahriar, J. Classification and Comparison of Maximum Power Point Tracking Techniques for Photovoltaic System: A Review. Renew. Sustain. Rev. 2012, 19, 433–443. [Google Scholar]
- Bhattacharyya, S.; Kumar, D.S.; Samanta, P.S.; Mishra, S. Steady Output and Fast Tracking MPPT (SOFT-MPPT) for P&O and InC Algorithms. IEEE Trans. Sustain. Energy 2021, 12, 293–302. [Google Scholar]
- Kumar, N.; Singh, B.; Panigrahi, B.K. PNKLMF-Based Neural Network Control and Learning-Based HC MPPT Technique for Multiobjective Grid Integrated Solar PV Based Distributed Generating System. IEEE Trans. Ind. Inform. 2019, 15, 3732–3742. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An Improved Particle Swarm Optimization (PSO)–Based MPPT for PV with Reduced Steady-State Oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]
- Kjær, S.B. Evaluation of the “Hill Climbing” and the “Incremental Conductance” Maximum Power Point Trackers for Photovoltaic Power Systems. IEEE Trans. Energy Convers. 2012, 27, 922–929. [Google Scholar] [CrossRef]
- Al-Atrash, H.; Batarseh, I.; Rustom, K. Effect of Measurement Noise and Bias on Hill-Climbing MPPT Algorithms. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 745–760. [Google Scholar] [CrossRef]
- Subudhi, B.; Pradhan, R.R. A Comparative Study on Maximum Power Point Tracking Techniques for Photovoltaic Power Systems. IEEE Trans. Sustain. Energy 2013, 4, 89–98. [Google Scholar] [CrossRef]
- Ali, M.N.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. An Efficient Fuzzy-Logic Based Variable-Step Incremental Conductance MPPT Method for Grid-Connected PV Systems. IEEE Access 2021, 9, 26420–26430. [Google Scholar] [CrossRef]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Self-Adaptive Incremental Conductance Algorithm for Swift and Ripple-Free Maximum Power Harvesting from PV Array. IEEE Trans. Ind. Informat. 2018, 14, 2031–2041. [Google Scholar] [CrossRef]
- Zhang, X.; Zha, L.; Liu, F.; Lei, T.; Wei, C. The analysis of power loss caused by the truncation error of MPPT algorithms. In Proceedings of the 2nd International Symposium on Power Electronics for Distributed Generation Systems, Hefei, China, 16–18 June 2010. [Google Scholar]
- Tey, K.S.; Mekhilef, S. Modified Incremental Conductance Algorithm for Photovoltaic System Under Partial Shading Conditions and Load Variation. IEEE Trans. Ind. Electron. 2014, 61, 5384–5392. [Google Scholar]
- Huynh, D.C.; Dunnigan, M.W. Development and Comparison of an Improved Incremental Conductance Algorithm for Tracking the MPP of a Solar PV Panel. IEEE Trans. Sustain. Energy 2016, 7, 1421–1429. [Google Scholar] [CrossRef]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A Variable Step Size INC MPPT Method for PV Systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar]
- Ping, W.; Hui, D.; Changyu, D.; Shengbiao, Q. An improved MPPT algorithm based on traditional incremental conductance method. In Proceedings of the 2011 4th International Conference on Power Electronics Systems and Applications, Hong Kong, China, 8–10 June 2011. [Google Scholar]
- Radjai, T.; Gaubert, J.P.; Rahmani, L. The new FLC-variable incremental conductance MPPT with direct control method using Cuk converter. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014. [Google Scholar]
- Abdourraziq, M.A.; Maaroufi, M.; Ouassaid, M. A new variable step size INC MPPT method for PV systems. In Proceedings of the 2014 International Conference on Multimedia Computing and Systems (ICMCS), Marrakech, Morocco, 14–16 June 2014. [Google Scholar]
- Zakzouk, N.N.E.; Elsaharty, M.A.; Abdelsalam, A.K.; Helal, A.A.; Williams, B.W. Improved performance low-cost incremental conductance PV MPPT technique. IET Renew. Power Gener. 2016, 10, 561–574. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, M.; Shoyama, M. Stability study of variable step size incremental conductance/impedance MPPT for PV systems. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011. [Google Scholar]
- Yang, L.; Yunbo, Z.; Shengzhu, L.; Hong, Z. Photovoltaic array MPPT based on improved variable step-size incremental conductance algorithm. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017. [Google Scholar]
- Kollimalla, S.K.; Mishra, M.K. A Novel Adaptive P&O MPPT Algorithm Considering Sudden Changes in the Irradiance. IEEE Trans. Energy Convers. 2014, 29, 602–610. [Google Scholar]
- Esram, T.; Chapman, P.L. Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef] [Green Version]
- Enslin, H.R.; Wolf, M.S.; Snyman, D.B.; Swiegers, W. Integrated photovoltaic maximum power point tracking converter. IEEE Trans. Ind. Electron. 1997, 44, 769–773. [Google Scholar] [CrossRef] [Green Version]
- Chin, V.J.; Salam, Z.; Ishaque, K. An improved method to estimate the parameters of the single diode model of photovoltaic module using differential evolution. In Proceedings of the 4th International Conference on Electric Power and Energy Conversion Systems (EPECS), Sharjah, The United Arab Emirates, 24–26 November 2015. [Google Scholar]
- Owusu-Nyarko, I.; Ahmed, K.H.; Alsokhiry, F.; Al-Turki, Y. A New 0.8Voc Model Technique to Estimate the Peak Global Voltage for Medium Voltage Megawatt Photovoltaic System Integration. In Proceedings of the 2020 9th International Conference on Renewable Energy Research and Application (ICRERA), Glasgow, UK, 27–30 September 2020. [Google Scholar]
- Ahmed, J.; Salam, Z. An Improved Method to Predict the Position of Maximum Power Point During Partial Shading for PV Arrays. IEEE Trans. Ind. Informat. 2015, 11, 1378–1387. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Irradiance (W/m2) | 1000 | 800 | 600 | 400 | 200 |
| Ambient current (A) | 3.500 | 2.826 | 2.11 | 1.421 | 0.7099 |
| Actual Voc_array | 211.00 | 209.60 | 207.70 | 205.30 | 201.70 |
| Estimated Voc_array | 210.21 | 208.18 | 205.38 | 201.56 | 195.89 |
| Deviation | 0.37% | 0.68% | 1.11% | 1.82% | 2.88% |
| Parameters | Value |
|---|---|
| 3.8 A | |
| 21.1 V | |
| 3.5 A | |
| 17.1 V | |
| 60 W | |
| Conditions | Variable Step-Size Methods | Energy Used (mJ) | Dynamic Performance | Tracking Accuracy |
|---|---|---|---|---|
| 1000 W/m2 to 400 W/m2 | [22] | 1522 | Low | Low |
| [26] | 186 | Low | High | |
| [28] | 192 | Low | Low | |
| Proposed | 163 | High | High |
| Conditions | Variable Step-Size INC Methods | Tracking Time (ms) | Efficiency (%) |
|---|---|---|---|
| 1000 W/m2 to 400 W/m2 | [22] | 120.3 | 98.20 |
| [26] | 18.4 | 99.18 | |
| [28] | 27.3 | 98.35 | |
| Proposed | 12.6 | 99.84 |
| Variable Step-Size Methods | Average Power at 1000 W/m2 | Settling Time (s) | Oscillation at MPP, W | Efficiency (%) |
|---|---|---|---|---|
| [22] | 595.2 | 32.88 | 3.3 | 99.45 |
| [26] | 596.4 | 13.17 | 2.1 | 99.65 |
| [28] | 595.7 | 16.50 | 2.8 | 99.53 |
| Proposed | 596.9 | 10.09 | 1.6 | 99.73 |
| Conditions | Variable Step-Size INC Methods | Tracking Time (ms) |
|---|---|---|
| 800 W/m2 to 400 W/m2 | [22] | 88.8 |
| [26] | 17.6 | |
| [28] | 31.2 | |
| Proposed | 10.2 |
| Parameters | Value |
|---|---|
| Boost converter Switching frequency | 10 kHz |
| Boost converter inductance | 1.5 mH |
| Boost converter capacitance | 2200 µf |
| DC-bus voltage | 110 V |
| Parameter | Value |
|---|---|
| Maximum power | 305 W at STC |
| Number of Cells | 96 |
| Current at MPP | 5.58 A |
| Voltage at MPP | 54.7 A |
| Open Circuit Voltage | 64.2 V |
| Short Circuit Current | 5.96 A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Owusu-Nyarko, I.; Elgenedy, M.A.; Abdelsalam, I.; Ahmed, K.H. Modified Variable Step-Size Incremental Conductance MPPT Technique for Photovoltaic Systems. Electronics 2021, 10, 2331. https://doi.org/10.3390/electronics10192331
Owusu-Nyarko I, Elgenedy MA, Abdelsalam I, Ahmed KH. Modified Variable Step-Size Incremental Conductance MPPT Technique for Photovoltaic Systems. Electronics. 2021; 10(19):2331. https://doi.org/10.3390/electronics10192331
Chicago/Turabian StyleOwusu-Nyarko, Isaac, Mohamed A. Elgenedy, Ibrahim Abdelsalam, and Khaled H. Ahmed. 2021. "Modified Variable Step-Size Incremental Conductance MPPT Technique for Photovoltaic Systems" Electronics 10, no. 19: 2331. https://doi.org/10.3390/electronics10192331