
Robust Predictive Control Scheme for Permanent-Magnet Synchronous Generators Based Modern Wind Turbines



Abstract
:1. Introduction
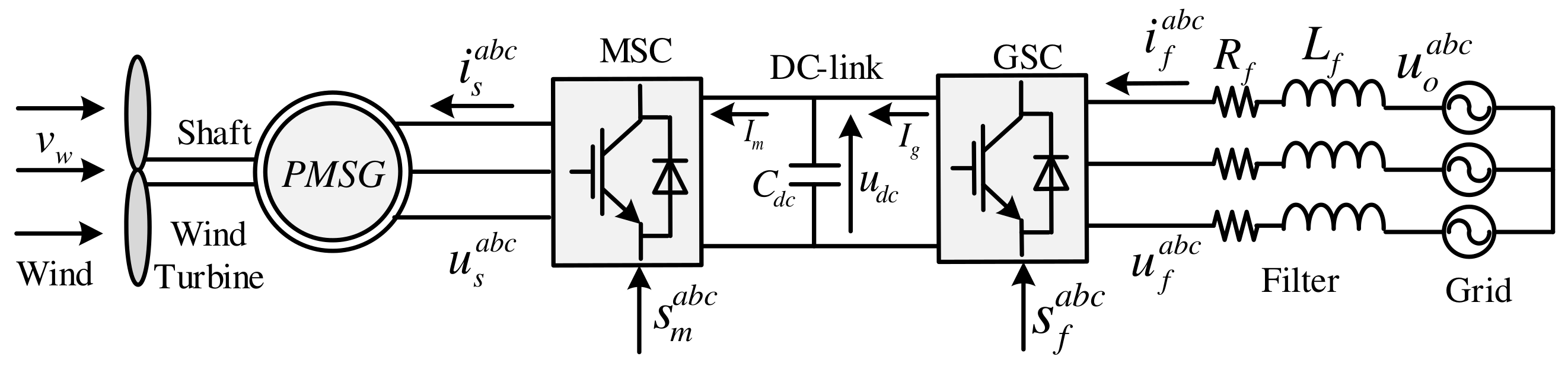
2. Modeling of the Wind Turbine and PMSG
2.1. Modeling of the Wind Turbine
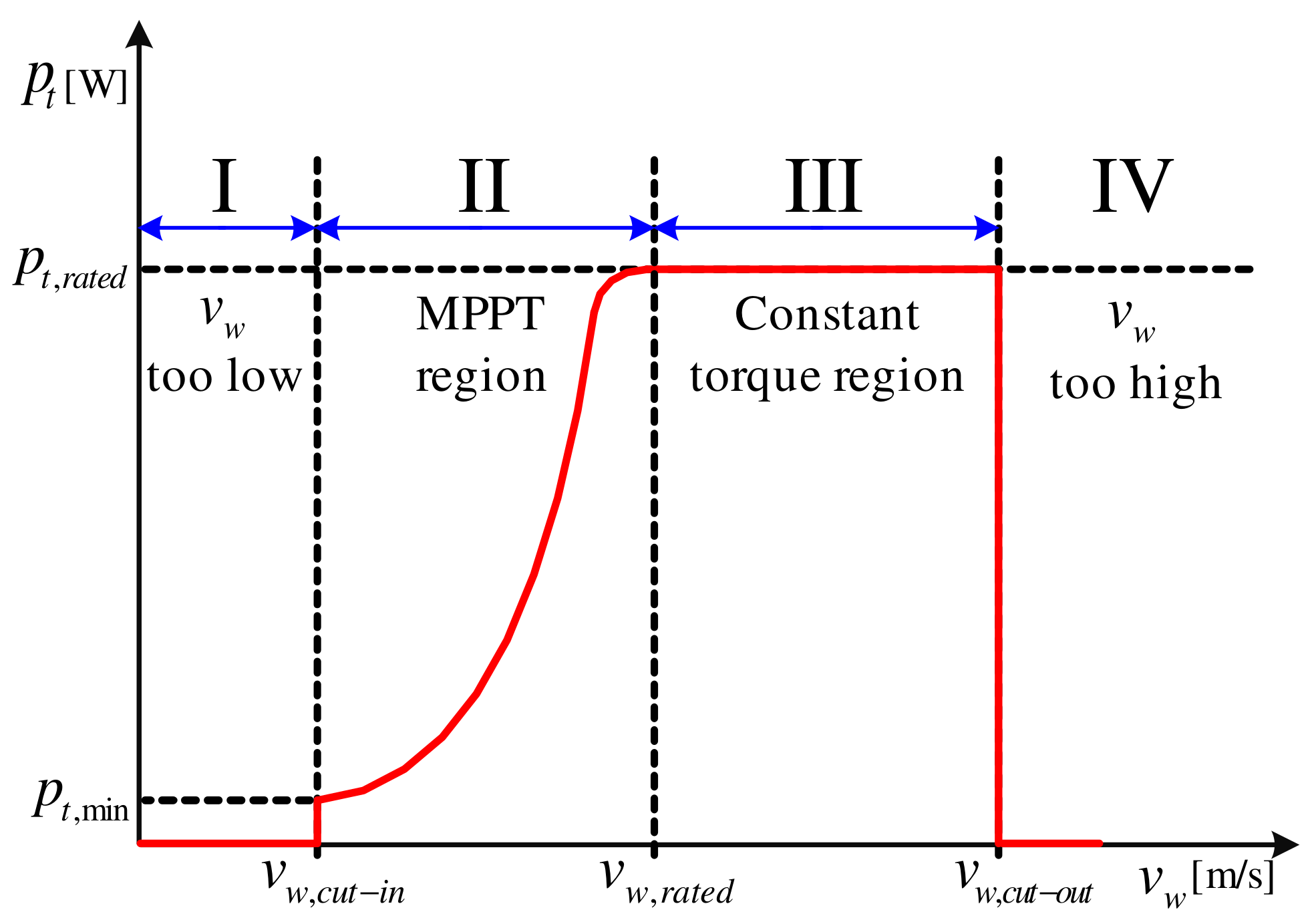
- Region I: In this region, the speed of the wind is lower than the cut-in value of the wind turbine. Accordingly, the wind turbine does not work in this region and the generated power is zero (i.e., ).
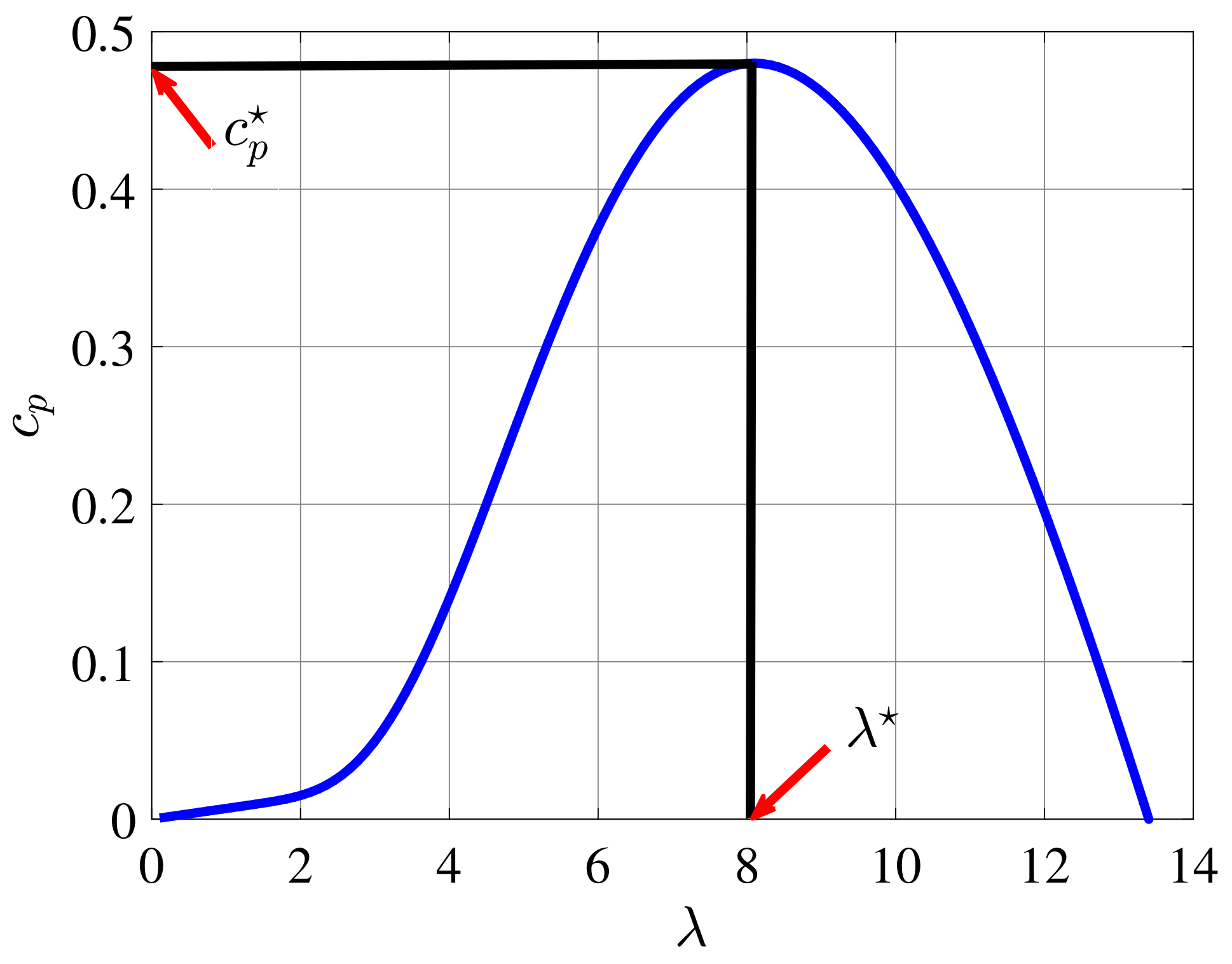
- Region II: In this zone, the velocity of the wind is higher than the cut-in value and lower than the rated wind speed , i.e., . Subsequently, the wind turbine works in this region. Furthermore, an algorithm is utilized to produce the maximum power from the wind turbine by operating at the optimal tip speed ratio . Accordingly, the power coefficient has its maximum value and , see Figure 3. In this conditions, the generated power can be written as follows:Based on Equation (3), can be expressed as follows:Subsequently, the optimum mechanical torque is written as follows:The maximum power point tracking (MPPT) is realized by the nonlinear speed controller as follows:which force the mechanical angular speed of the rotor to achieve the following condition . This method is called optimal torque control (OTC).
- Region III: In this zone, the wind speed is higher than the rated value and lower than the cut-out wind speed of the wind turbine. Therefore, in this region, the wind turbine generates the rated power and torque . This is achieved by increasing the pitch angle .
- Region IV: In this zone, the velocity of the wind is higher than the cut-out value . Increasing the pitch angle is not effective in limiting the output power. Accordingly, the turbine is shut down and no power is generated (i.e., ).
2.2. Permanent-Magnet Synchronous Generator (PMSG)
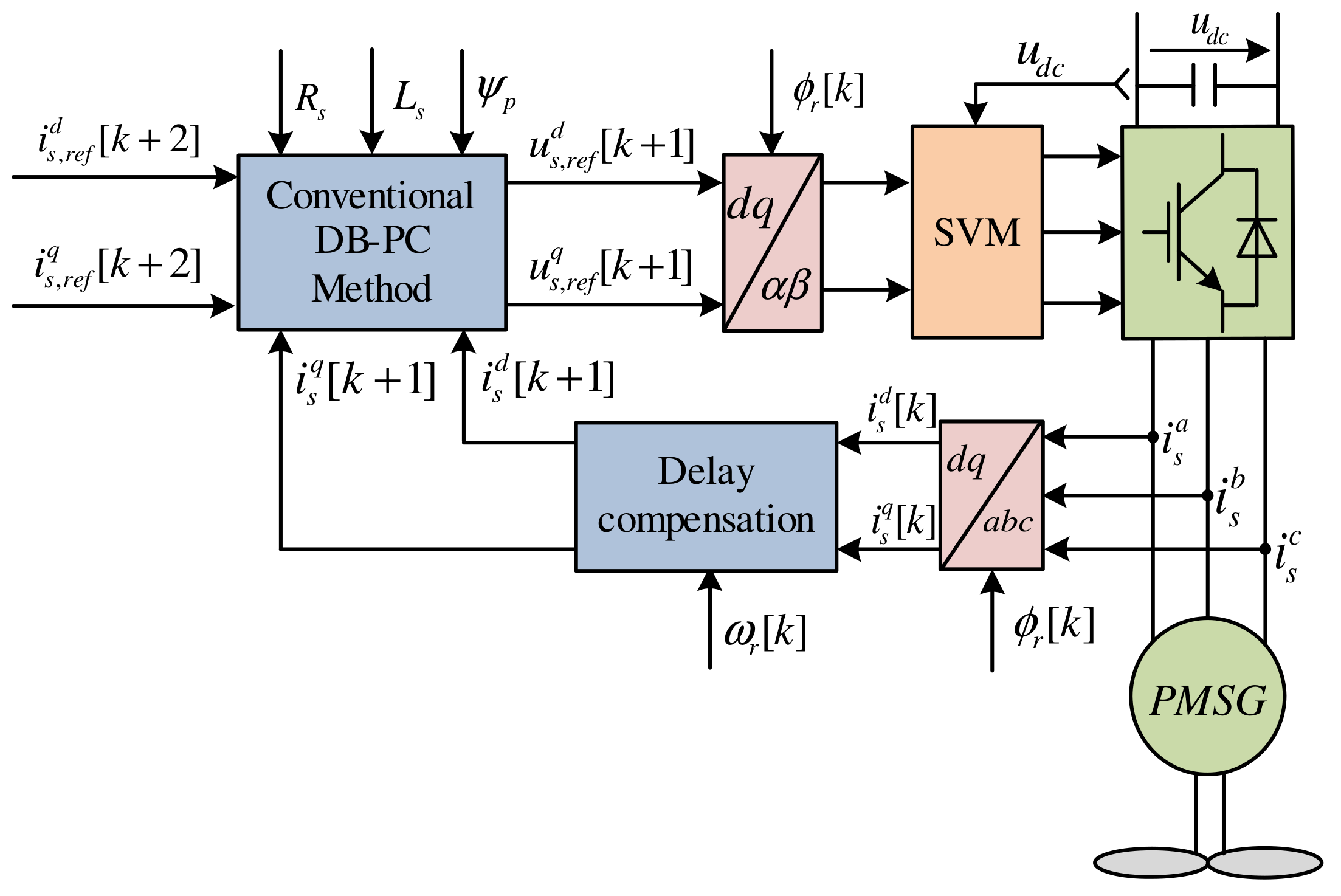
3. Traditional Deadbeat Predictive Control
4. Proposed Deadbeat Predictive Control
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bimal, K. Bose, Power Electronics in Renewable Energy Systems and Smart Grid: Technology and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 2019. [Google Scholar]
- Shourangiz-Haghighi, A.; Diazd, M.; Zhang, Y.; Li, J.; Yuan, Y.; Faraji, R.; Ding, L.; Guerrero, J.M. Developing More Efficient Wind Turbines: A Survey of Control Challenges and Opportunities. IEEE Ind. Electron. Mag. 2020, 14, 53–64. [Google Scholar] [CrossRef]
- Ahmed, S.D.; Al-Ismail, F.S.M.; Shafiullah, M.; Al-Sulaiman, F.A.; El-Amin, I.M. Grid Integration Challenges of Wind Energy: A Review. IEEE Access 2020, 8, 10857–10878. [Google Scholar] [CrossRef]
- Tang, X.; Hu, Y.; Chen, Z.; You, G. Flexibility Evaluation Method of Power Systems with High Proportion Renewable Energy Based on Typical Operation Scenarios. Electronics 2020, 9, 627. [Google Scholar] [CrossRef]
- Orlando, N.A.; Liserre, M.; Mastromauro, R.A.; Dell’Aquila, A. A Survey of Control Issues in PMSG-Based Small Wind-Turbine Systems. IEEE Trans. Ind. Inform. 2013, 9, 1211–1221. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Oyedeji, M.O. Adaptive and predictive control strategies for wind turbine systems: A survey. IEEE/CAA J. Autom. Sin. 2019, 6, 364–378. [Google Scholar] [CrossRef]
- Abdelrahem, M. Predictive Control and Finite-Set Observers for Variable-Speed Wind Generators. Ph.D. Thesis, Technische Universität München, Munich, Germany, 2020. Available online: https://mediatum.ub.tum.de/1520001 (accessed on 10 May 2021).
- Abdelrahem, M.; Hackl, C.M.; Kennel, R. Limited-Position Set Model-Reference Adaptive Observer for Control of DFIGs without Mechanical Sensors. Machines 2020, 8, 72. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Rodríguez, J.; Kennel, R. Model Reference Adaptive System with Finite-Set for Encoderless Control of PMSGs in Micro-Grid Systems. Energies 2020, 13, 4844. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Burgos, J. Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef] [Green Version]
- Vafaie, M.H. Performance Improvement of Permanent-Magnet Synchronous Motor Through a New Online Predictive Controller. IIEEE Trans. Energy Convers. 2019, 34, 2258–2266. [Google Scholar] [CrossRef]
- Hammoud, I.; Xu, K.; Hentzelt, S.; Oehlschlaegel, T.; Kennel, R. On Offset-Free Continuous Model Predictive Current Control of Permanent Magnet Synchronous Motors. IFAC-PapersOnLine 2020, 53, 6662–6669. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model Predictive Control for Power Converters and Drives: Advances and Trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Valencia, D.F.; Tarvirdilu-Asl, R.; Garcia, C.; Rodriguez, J.; Emadi, A. Vision, Challenges, and Future Trends of Model Predictive Control in Switched Reluctance Motor Drives. IEEE Access 2021, 9, 69926–69937. [Google Scholar] [CrossRef]
- Morel, F.; Lin-shi, X.F.; Retif, J.M. A comparative study of predictive current control schemes for a permanent magnet synchronous machine drive. IEEE Trans. Ind. Electron. 2009, 56, 2715–2728. [Google Scholar] [CrossRef] [Green Version]
- Alexandrou, A.D.; Adamopoulos, N.K.; Kladas, A.G. Development of a Constant Switching Frequency Deadbeat Predictive Control Technique for Field-Oriented Synchronous Permanent-Magnet Motor Drive. IEEE Trans. Ind. Electron. 2016, 63, 5167–5175. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Simplified Model Predictive Current Control without Mechanical Sensors for Variable-Speed Wind Energy Conversion Systems. Electr. Eng. J. 2017, 99, 367–377. [Google Scholar] [CrossRef]
- Mehreganfar, M.; Saeedinia, M.H.; Davari, S.A.; Garcia, C.; Rodriguez, J. Sensorless Predictive Control of AFE Rectifier With Robust Adaptive Inductance Estimation. IEEE Trans. Ind. Inform. 2019, 15, 3420–3431. [Google Scholar] [CrossRef]
- Cheng, L.-J.; Tsai, M.-C. Enhanced Model Predictive Direct Torque Control Applied to IPM Motor with Online Parameter Adaptation. IEEE Access 2020, 8, 42185–42199. [Google Scholar] [CrossRef]
- Yao, Y.; Huang, Y.; Peng, F.; Dong, J.; Zhang, H. An Improved Deadbeat Predictive Current Control with Online Parameter Identification for Surface-Mounted PMSMs. IEEE Trans. Ind. Electron. 2019, 67, 10145–10155. [Google Scholar] [CrossRef] [Green Version]
- Hammoud, I.; Morsy, K.; Abdelrahem, M.; Kennel, R. Efficient model predictive power control with online inductance estimation for photovoltaic inverters. Electr. Eng. 2020, 102, 549–562. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Zhang, Z.; Kennel, R. Robust Predictive Control for Direct-Driven Surface-Mounted Permanent-Magnet Synchronous Generators Without Mechanical Sensors. IEEE Trans. Energy Convers. 2018, 33, 179–189. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, B.; Mei, Y. Deadbeat Predictive Current Control of Permanent-Magnet Synchronous Motors with Stator Current and Disturbance Observer. IEEE Trans. Power Electron. 2017, 32, 3818–3834. [Google Scholar] [CrossRef]
- Tang, P.; Dai, Y.; Li, Z. Unified Predictive Current Control of PMSMs with Parameter Uncertainty. Electronics 2019, 8, 1534. [Google Scholar] [CrossRef] [Green Version]
- Abdelrahem, M.; Hackl, C.M.; Kennel, R.; Rodriguez, J. Efficient Direct Model Predictive Control with Discrete Time Integral Action for PMSGs. IEEE Trans. Energy Convers. 2019, 34, 1063–1072. [Google Scholar] [CrossRef]
- Zhu, Y.; Tao, B.; Xiao, M.; Yang, G.; Zhang, X.; Lu, K. Luenberger Position Observer Based on Deadbeat-Current Predictive Control for Sensorless PMSM. Electronics 2020, 9, 1325. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Finite Position Set-Phase Locked Loop for Sensorless Control of Direct-Driven Permanent-Magnet Synchronous Generators. IEEE Trans. Power Electron. 2018, 33, 3097–3105. [Google Scholar] [CrossRef]
- Wang, G.; Valla, M.I.; Solsona, J.A. Position Sensorless Permanent Magnet Synchronous Machine Drives—A Review. IEEE Trans. Ind. Electron. 2020, 67, 5830–5842. [Google Scholar] [CrossRef]
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Power Conversion and Control of Wind Energy Systems; Wiley-IEEE Press: Hoboken, NJ, USA, 2011. [Google Scholar]
- Heier, S. Grid Integration of Wind Energy Conversion Systems; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 1998. [Google Scholar]
- Boldea, I. Variable Speed Generators; Taylor and Francis Group, LLC: Abingdon, UK, 2006. [Google Scholar]
- Li, X.; Kennel, R. General Formulation of Kalman-Filter-Based Online Parameter Identification Methods for VSI-Fed PMSM. IEEE Trans. Ind. Electron. 2021, 68, 2856–2864. [Google Scholar] [CrossRef]
- Boileau, T.; Leboeuf, N.; Nahid-Mobarakeh, B.; Meibody-Tabar, F. Online Identification of PMSM Parameters: Parameter Identifiability and Estimator Comparative Study. IEEE Trans. Ind. Appl. 2011, 47, 1944–1957. [Google Scholar] [CrossRef]
- Nalakath, S.; Preindl, M.; Emadi, A. Online multi-parameter estimation of interior permanent magnet motor drives with finite control set model predictive control. IET Electr. Power Appl. 2017, 11, 944–951. [Google Scholar] [CrossRef] [Green Version]
- Bolognani, S.; Tubiana, L.; Zigliotto, M. Extended Kalman filter tuning in sensorless PMSM drives. IEEE Trans. Ind. Appl. 2003, 39, 1741–1747. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Symbol | Value |
|---|---|---|
| Nominal power | ||
| Nominal stator line–line voltage | ||
| DC-link voltage | ||
| Nominal mechanical angular speed | ||
| Stator resistance | ||
| Stator inductance | ||
| Permanent-magnet flux linkage | ||
| Pole pairs | 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelrahem, M.; Hackl, C.; Kennel, R. Robust Predictive Control Scheme for Permanent-Magnet Synchronous Generators Based Modern Wind Turbines. Electronics 2021, 10, 1596. https://doi.org/10.3390/electronics10131596
Abdelrahem M, Hackl C, Kennel R. Robust Predictive Control Scheme for Permanent-Magnet Synchronous Generators Based Modern Wind Turbines. Electronics. 2021; 10(13):1596. https://doi.org/10.3390/electronics10131596
Chicago/Turabian StyleAbdelrahem, Mohamed, Christoph Hackl, and Ralph Kennel. 2021. "Robust Predictive Control Scheme for Permanent-Magnet Synchronous Generators Based Modern Wind Turbines" Electronics 10, no. 13: 1596. https://doi.org/10.3390/electronics10131596