1. Introduction
The path planning problem for a set of Unmanned Aerial Vehicles (UAVs) has gained unprecedented interest from researchers and practitioners to develop intelligent systems and execute various tasks with minimum human intervention. With upgraded components such as cameras, sensors, or telemetry systems, UAV application is becoming an integral strategic part for emergency management; aerial photography; mountain rescue; smart farming; maritime search and rescue; information collection, post-disaster relief; homeland security, crowd management, etc. [
1,
2,
3]. UAVs, in practice, has many significant advantages such as human workload reduction, high mobility, saving of valuable resources, etc. In the literature, the path planning problem is categorized in several ways according to problem characteristics. For example, according to the targets’ reaction, one can classify the problem into two categories: one-sided vs. two-sided path planning problems. On the other hand, based on targets’ motion, one can classify the situation as static vs. moving target search or open vs. closed-loop decision models based on the decision-making context [
4,
5,
6,
7,
8,
9,
10].
In recent years, the utilization of UAVs has been becoming increasingly attractive in the context of Smart City Management solutions. Several key technologies are continuously integrated into smart cities operations, such as data collection and protection and intrusion detection technologies. In this regard, the application of UAVs to collect data or images is an economical and effective solution. UAVs operations can lead to a new paradigm for developing smart cities with a high-quality life and sustainable economic growth. For example, Felemban et al. [
11] noted that UAVs could be used to detect the earlier signs of a stampede, congestion, and other crowd problems. The authors proposed a Priority-Based Routing Framework to increase the delivery speed of images during Hajj in Saudi Arabia. Researchers found that UAVs can be helpful in policing systems to fight against crime [
12]. It was reported that such UAV policing systems work well for extensive crime deterrence [
13]. However, there are many challenges, and we highlight one of those where UAVs are deployed in search and rescue problems.
Due to the sequential decision-making nature, the fundamental search and rescue path planning problem is a non-deterministic polynomial-time problem (NP-hard) [
14]. Therefore, researchers employ both exact algorithm and heuristic approaches alternatively to solve such complex decision-making problems. One can argue that the modern search theory originated from the pioneering works by the group of researchers, Stewart [
8], Brown [
15] and Benkoski et al. [
16]. Researchers mainly focus on the allocation decision instead of the optimal sequential path generation. By assuming an exponential detection function, Stewart [
8] formulated a network flow model to characterize a moving target detection problem and used the branch and bound method to find a near-optimal solution. Later, Eagle [
4] formulated the model in a dynamic programming framework and utilized the Markov process to replicate target motion as state transitions. Washburn [
17] made an effort to determine the best upper bound for a generalized path planning problem. After that, researchers progressively shifted their attention toward the evaluation of algorithm performance in more complex enshrinement [
18]. However, the travel time in the earlier model was assumed as uniform. Lau et al. [
19] relaxed this assumption and formulated a model where travel time among regions are non-uniform. Rogge and Aeyels [
20] introduced the concept of a collaborative path planning problem where the search area consists of multiple moving targets with an arbitrary number of obstacles. Li et al. [
21] studied energy-efficient rechargeable UAV deployment strategy to provide seamless coverage in urban areas and employed the two-stage particle swarm optimization (PSO) algorithm to solve the problem. Regarding other variants, Berger and Lo [
22] introduced a mixed-integer programming model under a directed acyclic graph framework and used CPLEX software to find an optimal path. To overcome computational effort, Perez-Carabaza et al. [
23] proposed a modified ant colony optimization (ACO) algorithm to investigate the nature of trajectories for a set of heterogeneous UAVs. Ye et al. [
24] used an adaptive genetic algorithm (GA) to find the solution for a collaborative multiple task assignment problem with fixed-wing UAVs. The authors employed a robust encoding strategy to generate feasible chromosomes. Lu et al. [
25] use the wolf pack algorithm (WPA) to solve the task assignment problem for UAVs. The authors found that WPA can outperform PSO and GA in terms of convergence speed and solution accuracy. Lou et al. [
26] proposed a multi-swarm fruit fly optimization algorithm to find a solution for multi-UAV cooperative mission planning problem. However, Alhaqbani et al. [
27] stated that a common problem in most of the metaheuristics is that those can perform poorly in regards to run time. More recently, Xiong et al. [
28] introduced Voronoi-based Ant colony optimization algorithm combined with the Dijkstra’s algorithm to investigate optimal trajectories. In recent years, various types of machine learning algorithms have been employed to obtain optimal deployment strategy, and we refer to the recent review works by [
29] and [
30] for detailed discussion in this aspect. In addition, we refer the following works for more discussion on path planning from various perspectives [
31,
32,
33,
34,
35,
36,
37].
In this study, we use a modified Variable Neighborhood Search (VNS) meta-heuristic [
38]. Since its inception, the algorithm has been employed in numerous fields such as network design problems in communication [
39], facility location problem [
40], data mining [
41], timetabling and related manpower organization problems [
42], single- and multi-objective job shop scheduling [
43,
44], vehicle routing problem [
45] and bioinformatics [
46] due to its user-friendliness, higher precision and robustness. The VNS systematically exploits the idea of neighborhood change iteratively to improve the initial solution inside the shaking and local search procedures [
47,
48]. Unlike other meta-heuristic approaches, parameter tuning is always an issue; the fundamental VNS algorithm and its extension version require few or, occasionally, no parameters. One significant advantage to the VNS-based approach for path planning is that it accommodates the path maneuverability through the path constructor (see Algorithm 1) operator. At the same time, the inherent shaking procedure seeks to overcome the possible local optima. The algorithm then attempts to improve the randomly changed path to catch a more rewarded path than the incumbent solution.
The cited literature’s main disadvantage is that most authors only studied the problem as a single-objective optimization problem, e.g., maximizing the probability of finding targets, minimizing the path length, equal utilization of resources, etc. However, in a time-constrained decision-making context, only considering one objective may not lead to an acceptable outcome [
49,
50]. From a practical point of view, it is essential to handle several objectives simultaneously to obtain a pragmatic solution. Explicitly, the two most fundamental goals that need to be considered are maximization of finding the targets and minimizing the path length objective that can ensure minimum utilization of resources and implicitly ensure less operational time and energy consumption. It is challenging to find the ideal solution due to the conflicting nature of objective functions; therefore, researchers have proposed different approaches such as weighted sum [
51], global criterion [
52], goal programming [
53], multi-choice goal programming [
54], non-dominated sorting genetic algorithm II [
55], fuzzy-two phase approach [
56], etc., and the issue of a specific method largely depends on the decision-makers. Note that UAV path planning is itself an NP-hard problem [
57]; thus, we use a simple weighted sum approach in this study. This study formulated the model as binary linear programming (BLP) formulation under a bi-objective optimization environment and proposed a modified VNS algorithm to find the solution. Numerical experiments were conducted to validate the overall framework. The key contributions of the study are as follows: First, a bi-objective optimization problem is proposed to obtain paths for multiple UAVs in a time-constrained environment. Second, a modified VNS algorithm is proposed, which is highly parallelizable and straightforward to understand. Moreover, the simulation study reveals that it can provide a solution within a reasonable time when the exact solver fails to provide a solution, and the performance for the algorithm is always higher compared to Dijkstra’s algorithm, which is extensively used by several researchers [
58,
59]. Finally, a sensitivity analysis on the weight-space provide an overview regarding the importance of multi-objective formulation in the practical implementation of UAVs.
The paper is organized as follows. The mathematical model and corresponding assumption and notation are presented in
Section 2. In
Section 3, an overview is presented for the data generation. The solution procedure for the model is described in
Section 4. A detailed overview of the VNS algorithm is also presented in this section. Extensive numerical experiments and validation of the proposed solution framework’s effectiveness are presented in
Section 5. Finally,
Section 6 concludes by highlighting findings, limitations and future research directions.
2. Mathematical Model
Path planning and trajectory mapping for UAV is an important topic because of the incredible versatility and flexibility of UAVs that allow them to be employed in different operations. Although path planning goes before trajectory mapping, fundamentally, their characteristics are not entirely distinct. If point-to-point trajectories are measured, the two problem needs to be solved simultaneously if the initial and final positions are specified. One can define the path planning problem as finding a collision-free motion within a specified environment where initial and final locations are pre-defined. In this study, we use the cell decomposition method. In this method, the entire search space is subdivided into several regions (equal/unequal), called cells. The corresponding path will represent a connected graph and describe the adjacent relations between cells. Simultaneously, the trajectory planning problem is based on the input generated by the path planner. To plan a trajectory, commonly, a sequence of waypoints needs to be extracted. A kinematic inversion needs to be performed based on some decision-maker criteria such as minimizing total execution time, energy, distance, jerk, etc. In the present formulation, we ignore the effect of the kinematics of the UAV. We assume that a team of homogeneous UAVs is searching stationary targets in a pre-defined search region [
60].
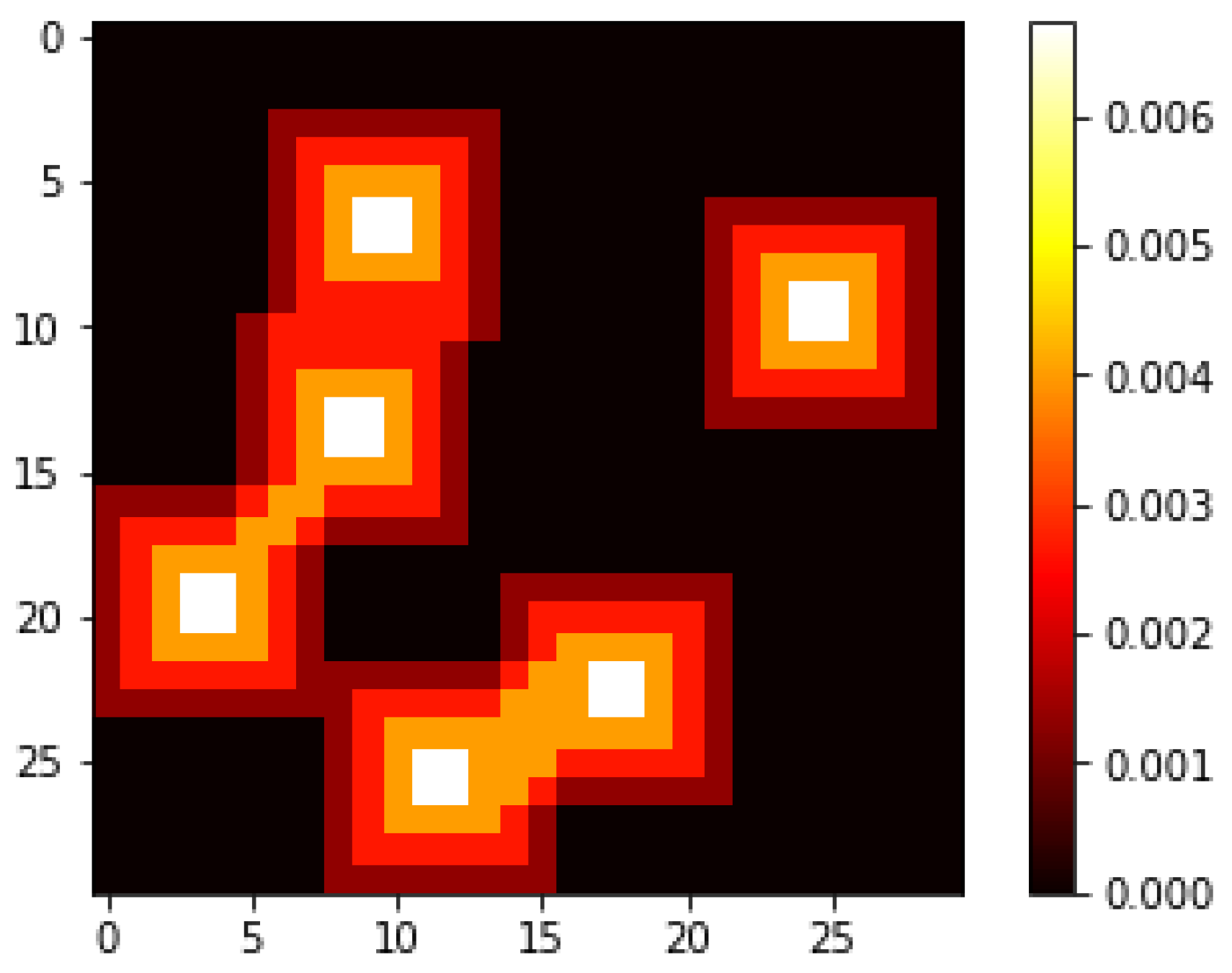
The search area is divided into an grid describing possible target locations. The time duration for each cell visit, with equal size, is assumed as constant. The cell occupancy probabilities are generated initially, and, as we assume the targets to be stationary and non-moving, we omit the dynamics of a changing probability map. To maneuver its neighboring cells, any UAV can move in eight different directions{E, W, N, S, SE, SW, NE, NW}. However, at the cell where the UAVs start maneuvering is located, the UAVs are also allowed to hover. This mimics the possibility of early landing or later departure for some UAVs. A graph theory-based directed acyclic network representation is employed to streamline the setup. The entire graph is defined as for all t in a given time horizon T, , the set of vertices, represent all possible locations at time . , the set of edges, represents all the possible state transition related to each UAV between episodes t and . An adjacency matrix A defines the connectivity of G, if and are connected, else . Consequently, a binary decision variable is introduced to represent the cells n traversed at the respective time period t for the respective rth UAV.
The following notations are used to formulate the mathematical model:
| N | the entire search region is divided into number of cells with equal area in the grid, |
| T | set of time intervals with equal length defining the time horizon to explore a grid, |
| R | number of UAVs, |
| probability of actual target occupancy on cell n |
| state transition binary variable; , if the path of rth UAV investigates the nth cell in time period t, while , if that the corresponding cell is not visited |
| a binary matrix representation of the infeasible maneuvers. That is, whenever |
| a binary binary matrix representation of all cells through the time horizon representing the same location |
| a binary matrix representation of the cells that can only be visited once |
| a binary matrix representation of all maneuvers performed in the time period t |
| a binary matrix representation of start and ending positions for UAV |
Based on the above notation, the following mathematical model is proposed, where the first objective represents the cumulative probability of success for the total number of UAVs to be deployed and the second objective minimizes the total spent time performing the mission:
Constraint (
3) ensures that infeasible maneuvers cannot be performed between two consecutive time periods. The binary matrix
F showcases each pair between consecutive cells
n and
that are infeasible for a given time period
t. That is, if
, then the two cells
n and
in time period
t and
, respectively, are not feasible in the same path for any
r.
Constraint (
4) enforces a safety zone around each path, that is, a single agent
r can only traverse a cell in a given time period. Note that the binary matrix
Z showcases the decision variable’s index that represents the same time period.
Here, constraint (
5) considers gathering images of a cell over multiple different time periods, where the binary
B matrix showcase each index that represents the same cell. In this paper, we neglect the dynamics of changing probability, and we are not interested in obtaining a search path that acquires multiple images of the same cell. Note that we do not have to consider a conditional probability map that is dependent on the chosen paths because of this constraint, as the cumulative probability will be in the range of
.
In constraint (
6), the binary
H matrix ensures that the paths only allow a single maneuver to be performed per time period per UAV.
Constraint (
7) ensures that the complete path starts and ends in the designated time zones in the designated time periods.
Finally, the above constraint (
8) represent the decision and auxiliary variables.
4. Solution Procedure
In this section, we explain the solution procedure and the selection of search parameters for the employed search method. The exact approach is often not applicable in large-scale scenarios, as it can even fail to deliver a feasible solution. In a time-restricted environment such as UAV-assisted search and rescue, this is not applicable. On the other side of the spectrum, a greedy approach does deliver a feasible solution, but it often lacks in performance. This is what we try to investigate with the deployed VNS approach. We evaluate the performance of the algorithm with Dijkstra’s algorithm and exact solvers such as GNU Linear Programming Kit (GLPK) to establish its efficiency. However, before doing so, the following definitions should be presented.
Definition 1. Multiple objective optimization problems can be represented as follows:where are the decision variables; are maximization type objective functions; are minimization type objective function; are set of constraints [60]. Definition 2. A decision plan is said to be a Pareto optimal solution to the multiple objective optimization problems if there does not exist another , such that for all k and for at least one s Wu et al. [61]. From the perspective of the search and rescue problem, it is difficult to define the strict upper or lower bounds for the multi-objective setting problem. This is first because of the fuzzy nature of the multi-objective setting but also because of the complexity of obtaining a solution. Therefore, we incorporate both exact and inexact solution approachs to illustrate these issues.
4.1. Transforming Multi-Objective Framework into a Single-Objective One
When dealing with a multi-objective framework, several types of solution approaches can be applied, such as transforming the problem into a single-objective one, incorporating them through a lexicographic method, identifying the entire Pareto front to determine the trade-off among objective weightings, etc. Therefore, it generally comes down to whether the decision maker’s preference is incorporated before, under or after exploring the solution space.
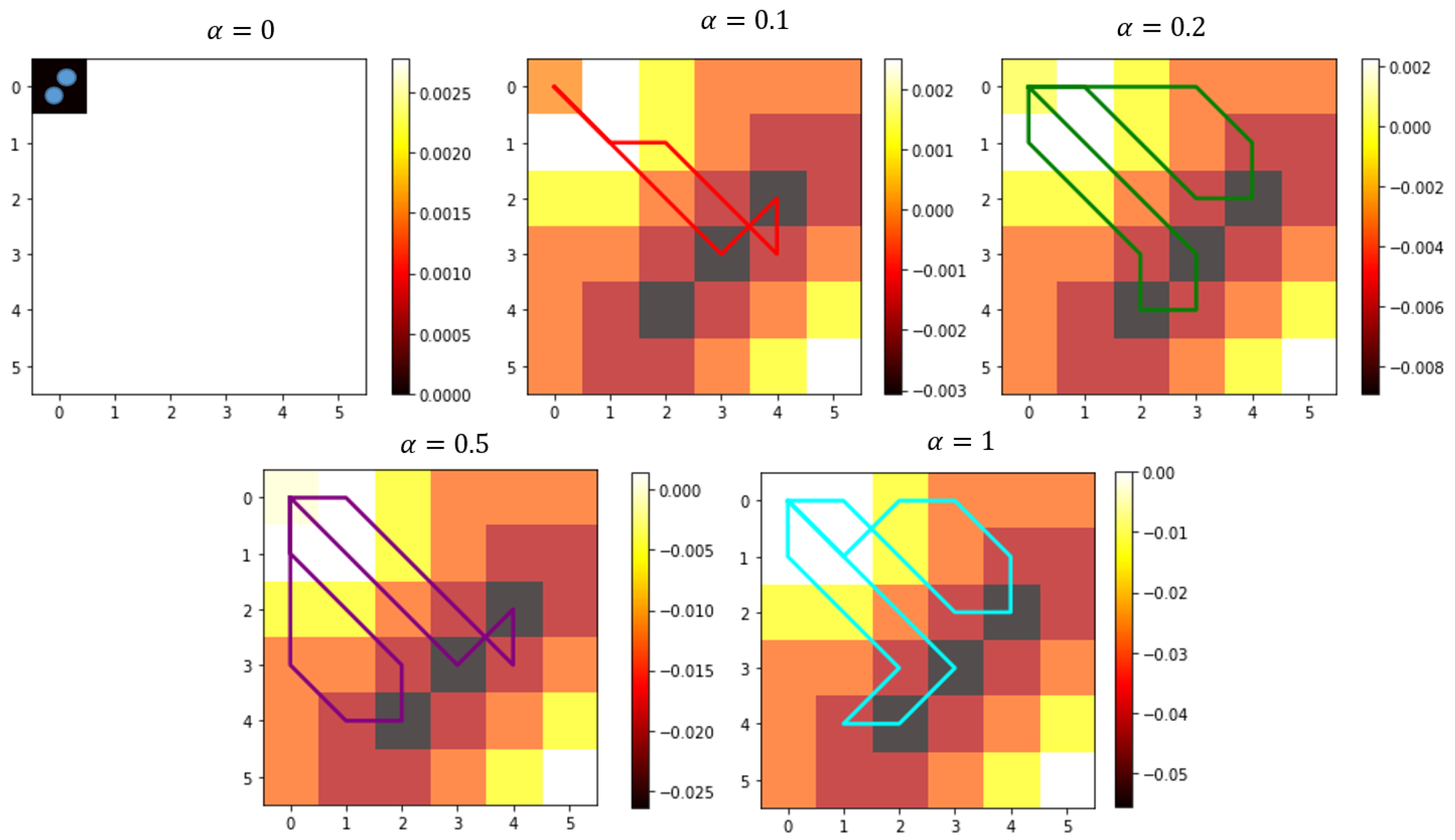
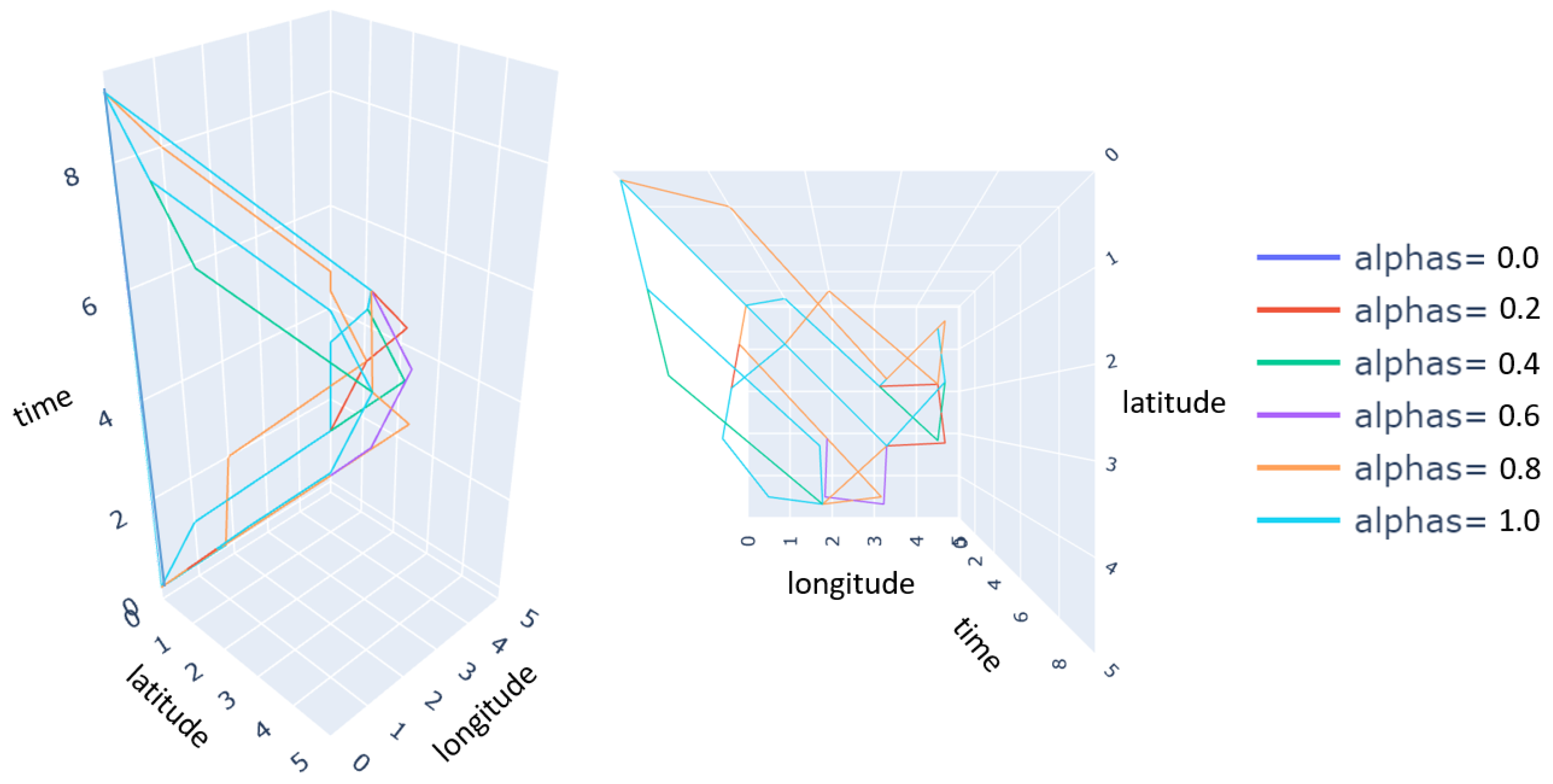
In a time-restricted environment such as search and rescue mission planning, it is of absolute necessity that a solution can be obtained in real-time. Therefore, we utilize the approach to transform the multi-objective framework into a single objective. For the bi-objective framework, the objectives do not have a fitting cost transform due to the respective units of the objectives. However, there is a range similarity in terms of the sum of them being between 0 and 1; a simple weighted average is, therefore, fitting to do this. Here,
represents the trade-off between the objectives [
62].
Note that the naive weighted average can be controversial, and we therefore elaborate the use of this in
Section 5 (for more information see, Wang [
29]).
4.2. GLPK
We utilized the freely available GNU Linear Programming Kit (GLPK) package for the exact solution procedure. The GLPK package is used for large-scale mixed-integer linear programming problems [
63]. It utilizes the branch-and-cut method for integer restriction of the decision variables, extending to the branch-and-bound and cutting plane method. The package is implemented in Python, where a maximum solution time is set to 12 min. In a general real-world setting, the ultimately allowed solution time in practice is likely to be lower, and this limit is therefore only set for illustrative purposes.
4.3. Dijkstra’s Algorithm
A useful path can be established by implementing graph searching algorithms. In this direction, we utilize Dijkstra’s Algorithm, which is extensively used in single-source shortest path problems with non-negative weights for each edge. In implementing the Dijkstra’s algorithm for the path finding problem, it is imperative to introduce the constraint on revisiting nodes that represent the same location in different time periods. A way to incorporate this is when visiting the node (i.e., that node being the lowest distance in the queue), then not allowing it to go back after a defined safety period has passed. The set of nodes is then removed in the same way as the visiting node is removed from the queue. Here, the distance that is sought to be minimized is the cumulative score, while the graph traversed is the directed graph G, not allowing it to go backward in time. We refer to the works of Yuan et al. [
58] and Sathyara et al. [
59] for the detail overview of the algorithm.
4.4. Variable Neighborhood Search
The inexact solution procedure developed in this research is a two-step VNS method that incorporates the general approaches of the VNS but couples that with the known information of directed acyclic graph of feasible paths through a path construction algorithm. The general VNS is proposed by Mladenovic and Hansen [
38] in 1997, and it represents a flexible framework for building heuristics to approximately solve combinatorial and non-linear optimization problems. The VNS search heuristic systematically changes its neighborhood structures to obtain a solution. It does so based on the following key observations [
64]:
A local optimum relative to one neighborhood structure is not necessarily a local optimum for another neighborhood structure.
A global optimum is a local optimum concerning all neighborhood structures.
Empirical evidence shows that all or a large majority of the local optima are relatively close to each other for many problems.
The ingredients of a variable neighborhood search heuristic include an improvement phase used to improve a given solution and a so-called shaking phase used to resolve local minima traps. The improvement phase, the shaking procedure and the neighborhood change step are executed alternately until a predefined stopping criterion. This research combined it with a path construct algorithm to obtain feasible solutions more quickly and ensure that it follows the stated constraints. The path construct algorithm can be found in the pseudo-code of Algorithm 1. This approach linearly goes through the available time horizon and selects the next maneuver through a weighted probability based on each alternative’s respective score. It accompanies the constraint by removing feasible maneuvers and steers it back to the end position by narrowing the feasible maneuvers based on the Chebyshev and Manhattan distances to the end position. Note that this feature of steering the path back to the selected end position is necessary as the two-step VNS randomly selects new neighborhoods to investigate. The grid representation is, therefore, not enough to steer it back. The integrated VNS approach selects a random neighborhood to improve upon the path. It stops selecting new neighborhoods when a designated number of iteration have been investigated. The pseudocode of the algorithm is presented in Algorithms 1 and 2.
| Algorithm 1: The path constructing algorithm: path_constructor(x_original, t1, t2, rs, score) |
![Electronics 10 01193 i001]() |
| Algorithm 2: Pseudocode representing VNS(score, N, R, T, neighborhood_size, nmax, kmax, tmax) |
![Electronics 10 01193 i002]() |
6. Conclusions
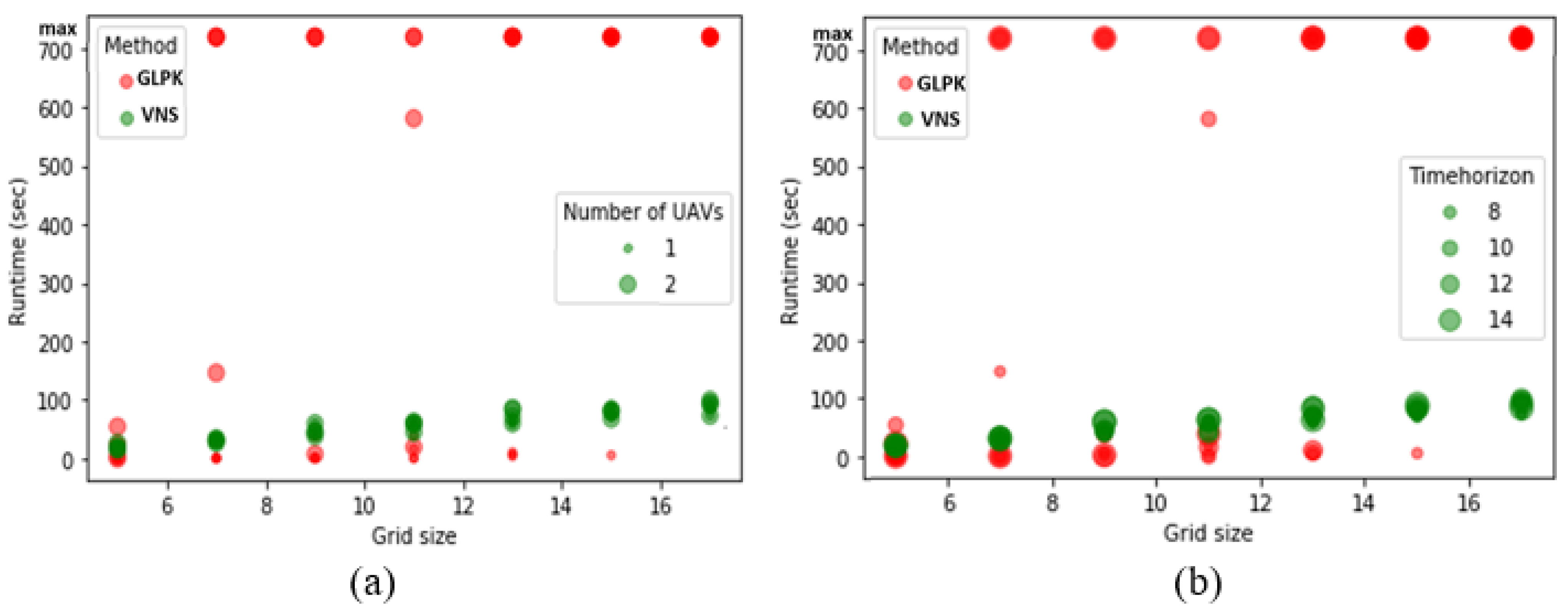
The smart city concept is almost around last couple of decades, and one of the critical concepts is to integrate cutting-edge technology without raising costs in improving environmental sustainability and life expectancy. In this direction, we proposed a multi-objective path planning and trajectory mapping problem under the mixed integer programming problem framework for a set of homogeneous UAVs deployed to search for static targets. A graph theory-based directed acyclic network representation is employed to reduce complexities and track the inward and outward movement of each UAV from its respective present cell location by ensuring flow conservation. A modification of the basic VNS algorithm is proposed and implemented in two phases to find the solution. In the first phase, a path is generated and in the second phase, trajectory mapping is done sequentially by considering constraints associated with the problem environment. Numerical simulation on synthetic experimental settings demonstrates that the proposed approach can reduce computational complexity and provide a solution within reasonable amount of time compared to the exact solver. Moreover, it is found that the exact solver is unable to provide a solution within a time threshold. When we compare the relative performance of VNS with GLPK or Dijkstra’s algorithm, it was found that Dijkstra’s algorithm’s performance is relatively lower as the grid size increases, which justifies the efficiency of the proposed algorithm. To our best knowledge, this is the first work to explore the path for multiple UAVs by using a bi-objective VNS algorithm. Considering the numerical evaluation, one can conclude that the approach presented in this study is a better alternative than the exact solver, and methodology can contribute to intelligent systems.
For future work, we intend to extend the proposed approach to calculate paths for finding moving targets. We assumed altitude differentiation from the perspective of collision avoidance. We ignored constraints such as fuel, sensor capacity, search pattern, etc., those need to be integrated to formulate a robust path planning model. We compared the outcome of proposed solution approach with exact solver, therefore one can employ other algorithms such as particle swarm optimization [
65], bat algorithm [
66],
algorithm [
59], machine learning (ML) algorithms [
29] etc. to compare the performance of the proposed VNS algorithm. Finally, one can use a multi-criterion decision-making algorithm [
67] to incorporate customizable preferences of decision-makers robustly to take advantage of the inherent flexibility while setting weights.










{kind=link}
{kind=link}
{kind=link}
{kind=link}