
Risk Control for Synchronizing a New Economic Model

Abstract
:1. Introduction
- A new method is proposed to compare the performance of different controllers.
- A new method is introduced to synchronize the fractional-order economic systems in the presence of external disturbances without traditional mathematical analysis of a system.
- The reliability and risk of the proposed method are analyzed.
- A new method is used to reduce the risk of the designed controller.
2. Fractional Calculation
Stabilityof Fractional Order Systems
- (1)
- For a commensurate system, the stability region is defined as
- (2)
- For an in-commensurate system, the stability region is
3. System Description
- 1
- Deviations in the investment market, such as an imbalance where investments exceed savings.
- 2
- Structural modification on beneficial conditions.
3.1. Factional-Order Economic System
3.2. Factional-Order Economic System in the Presence of Disturbance
4. Synchronization Method
5. Utilizing Reliability and Risk in the Proposed Controller Analysis
5.1. Reliability
5.2. Risk
5.3. Relation between Reliability and Risk
6. Risk Reduction in the Proposed Controllers
Biography Based Optimization Algorithm
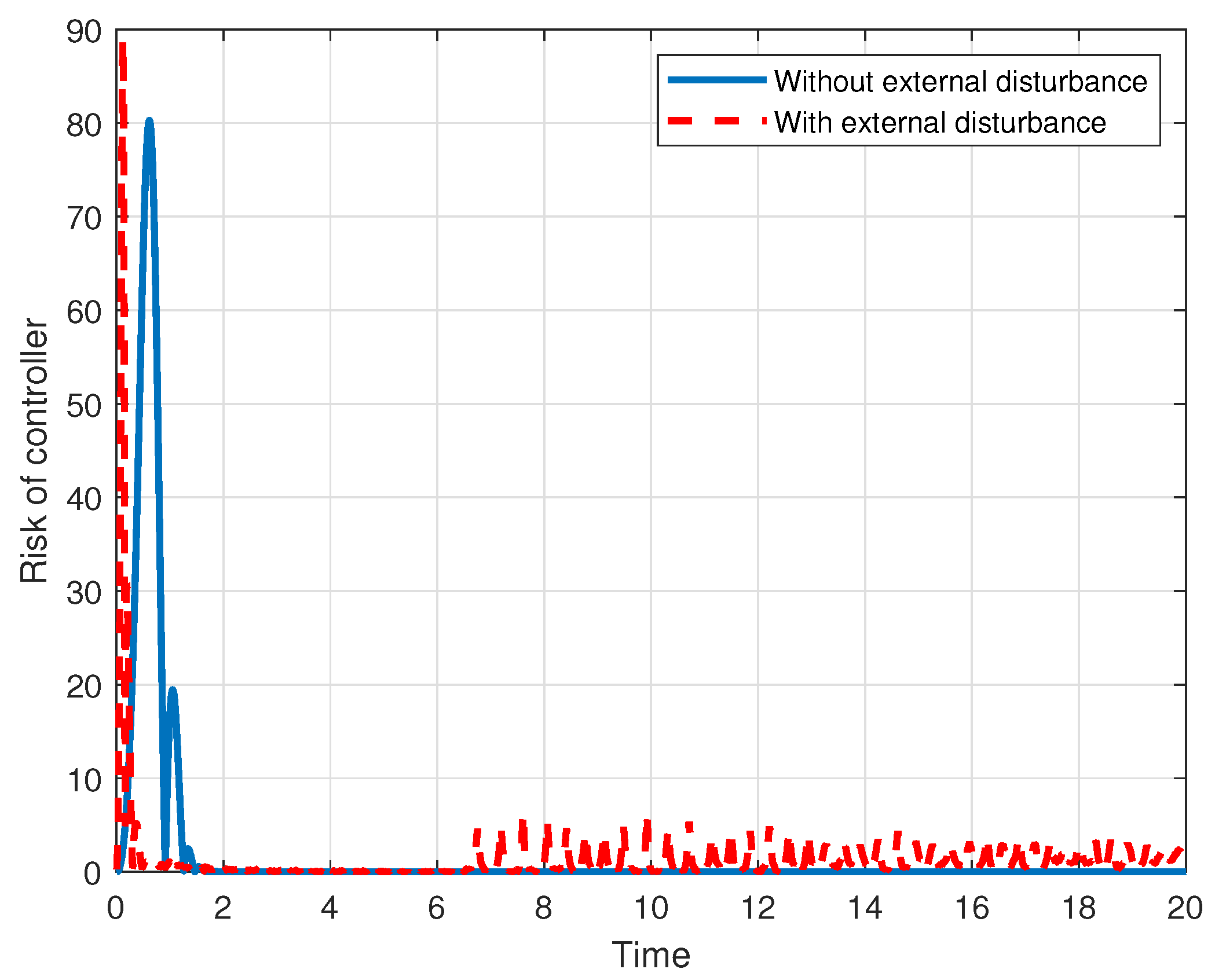
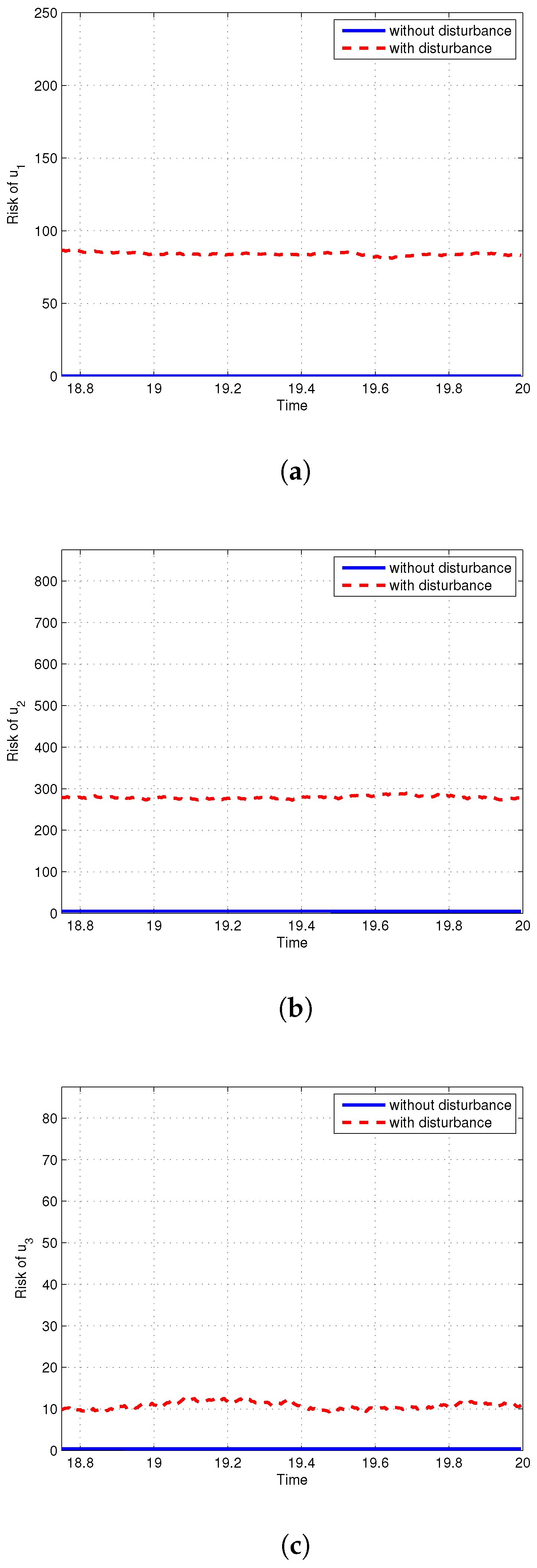
7. Results of Simulation
7.1. Example 1
7.2. Example 2
8. Discussion
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kabir, S.; Papadopoulos, Y. Applications of Bayesian networks and Petri nets in safety, reliability, and risk assessments: A review. Saf. Sci. 2019, 1, 154–175. [Google Scholar] [CrossRef]
- Moradi, R.; Groth, K.M. Hydrogen storage and delivery: Review of the state of the art technologies and risk and reliability analysis. Int. J. Hydrogen Energy 2019, 44, 12254–12269. [Google Scholar] [CrossRef]
- Akhtar, I.; Kirmani, S.; Jameel, M. Reliability assessment of power system considering the impact of renewable energy sources integration into grid with advanced intelligent strategies. IEEE Access 2021, 22, 32485–32497. [Google Scholar] [CrossRef]
- Ahmadi, S.; Hajihassani, M.; Moosazadeh, S.; Moomivand, H. An overview of the reliability analysis methods of tunneling equipment. Open Constr. Build. Technol. J. 2020, 24, 14. [Google Scholar] [CrossRef]
- Liu, L.; Xie, G.; Qian, F.; Wang, M.; Ma, X. Reliable control based on dual control for ARMAX system with abrupt faults. J. Frankl. Inst. 2021, 358, 5694–5706. [Google Scholar] [CrossRef]
- Breitung, K.; Casciati, F.; Faravelli, L. Reliability based stability analysis for actively controlled structures. Eng. Struct. 1998, 20, 211–215. [Google Scholar] [CrossRef]
- Jin, T.; Xia, H.; Gao, S. Reliability analysis of the uncertain fractional-order dynamic system with state constraint. Math. Methods Appl. Sci. 2021, 45, 2615–2637. [Google Scholar] [CrossRef]
- Shi, K.; Wang, J.; Tang, Y.; Zhong, S. Reliable asynchronous sampled-data filtering of T–S fuzzy uncertain delayed neural networks with stochastic switched topologies. Fuzzy Sets Syst. 2020, 381, 1–25. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Yan, H. Reliable fuzzy tracking control of near-space hypersonic vehicle using aperiodic measurement information. IEEE Trans. Ind. Electron. 2019, 66, 9439–9447. [Google Scholar] [CrossRef]
- Mazumder, R.K.; Salman, A.M.; Li, Y. Failure risk analysis of pipelines using data-driven machine learning algorithms. Struct. Saf. 2021, 89, 102047. [Google Scholar] [CrossRef]
- Zaroni, H.; Maciel, L.B.; Carvalho, D.B.; Pamplona, E.D. Monte Carlo Simulation approach for economic risk analysis of an emergency energy generation system. Energy 2019, 172, 498–508. [Google Scholar] [CrossRef]
- Sun, X.; Schulz, T.; Khedher, A.; Vanmaele, M. Model risk and discretisation of locally risk-minimising strategies. J. Comput. Appl. Math. 2017, 311, 38–53. [Google Scholar] [CrossRef]
- Gollier, C.; Weikard, H.P.; Wesseler, J. Introduction: Risk and Uncertainty in Environmental and Resource Economics. J. Risk Uncertain. 2004, 29, 5–6. [Google Scholar] [CrossRef]
- Pan, W.; Li, T.; Sajid, M.; Ali, S.; Pu, L. Parameter identification and the finite-time combination–combination synchronization of fractional-order chaotic systems with different structures under multiple stochastic disturbances. Mathematics 2022, 10, 712. [Google Scholar] [CrossRef]
- Dubey, S.; Chakraverty, S. Application of modified extended tanh method in solving fractional order coupled wave equations. Math. Comput. Simul. 2022, 198, 509–520. [Google Scholar] [CrossRef]
- Zhou, S.; Wang, X. Simple estimation method for the largest Lyapunov exponent of continuous fractional-order differential equations. Phys. A Stat. Mech. Appl. 2021, 563, 125478. [Google Scholar] [CrossRef]
- Wang, B.; Liu, J.; Alassafi, M.O.; Alsaadi, F.E.; Jahanshahi, H.; Bekiros, S. Intelligent parameter identification and prediction of variable time fractional derivative and application in a symmetric chaotic financial system. Chaos Solitons Fractals 2022, 154, 111590. [Google Scholar] [CrossRef]
- Yousri, D.; Mirjalili, S. Fractional-order cuckoo search algorithm for parameter identification of the fractional-order chaotic, chaotic with noise and hyper-chaotic financial systems. Eng. Appl. Artif. Intell. 2020, 92, 103662. [Google Scholar] [CrossRef]
- Soradi-Zeid, S.; Jahanshahi, H.; Yousefpour, A.; Bekiros, S. King algorithm: A novel optimization approach based on variable-order fractional calculus with application in chaotic financial systems. Chaos Solitons Fractals 2020, 132, 109569. [Google Scholar] [CrossRef]
- Wang, Y.L.; Jahanshahi, H.; Bekiros, S.; Bezzina, F.; Chu, Y.M.; Aly, A.A. Deep recurrent neural networks with finite-time terminal sliding mode control for a chaotic fractional-order financial system with market confidence. Chaos Solitons Fractals 2021, 146, 110881. [Google Scholar] [CrossRef]
- Wang, S.; He, S.; Yousefpour, A.; Jahanshahi, H.; Repnik, R.; Perc, M. Chaos and complexity in a fractional-order financial system with time delays. Chaos Solitons Fractals 2020, 131, 109521. [Google Scholar] [CrossRef]
- Chen, W.C. Nonlinear dynamics and chaos in a fractional-order financial system. Chaos Solitons Fractals 2008, 36, 1305–1314. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, X.; Shi, G. Analysis of nonlinear dynamics and chaos in a fractional order financial system with time delay. Comput. Math. Appl. 2011, 62, 1531–1539. [Google Scholar] [CrossRef] [Green Version]
- Campos, N.F.; Fidrmuc, J.; Korhonen, I. Business cycle synchronisation and currency unions: A review of the econometric evidence using meta-analysis. Int. Rev. Financ. Anal. 2019, 61, 274–283. [Google Scholar] [CrossRef]
- Qi, F.; Qu, J.; Chai, Y.; Chen, L.; Lopes, A.M. Synchronization of incommensurate fractional-order chaotic systems based on linear feedback control. Fractal Fract. 2022, 6, 221. [Google Scholar] [CrossRef]
- Bagheri, A.; Ozgoli, S. Exponentially impulsive projective and lag synchronization between uncertain complex networks. Nonlinear Dyn. 2016, J84, 2043–2055. [Google Scholar] [CrossRef]
- Zhang, W.; Cao, J.; Wu, R.; Alsaadi, F.E.; Alsaedi, A. Lag projective synchronization of fractional-order delayed chaotic systems. J. Frankl. Inst. 2019, 356, 1522–1534. [Google Scholar] [CrossRef]
- Rajaei, R.; Bagheri, A.; Ramezani, A.; Cornelius, S.P.; Gao, J. Designing pinning network controllability for interdependent dynamical networks. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 3478–3483. [Google Scholar]
- Du, H. Modified function projective synchronization between two fractional-order complex dynamical networks with unknown parameters and unknown bounded external disturbances. Phys. A Stat. Mech. Appl. 2019, 526, 120997. [Google Scholar] [CrossRef]
- Guo, R.; Zhang, Y.; Jiang, C. Synchronization of fractional-order chaotic systems with model uncertainty and external disturbance. Mathematics 2021, 9, 877. [Google Scholar] [CrossRef]
- Khan, A.; Nigar, U. Sliding mode disturbance observer control based on adaptive hybrid projective compound combination synchronization in fractional-order chaotic systems. J. Control Autom. Electr. Syst. 2020, 31, 885–899. [Google Scholar] [CrossRef]
- Yang, J.; Xiong, J.; Cen, J.; He, W. Finite-time generalized synchronization of non-identical fractional order chaotic systems and its application in speech secure communication. PLoS ONE 2022, 17, e0263007. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Liu, Y.; Wang, N. Nonlinear disturbance observer-based backstepping finite-time sliding mode tracking control of underwater vehicles with system uncertainties and external disturbances. Nonlinear Dyn. 2017, 88, 465–476. [Google Scholar] [CrossRef]
- Altan, A.; Hacıoğlu, R. Model predictive control of three-axis gimbal system mounted on UAV for real-time target tracking under external disturbances. Mech. Syst. Signal Process. 2020, 138, 106548. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive nonsingular fast terminal sliding-mode tracking control for an uncertain quadrotor UAV subjected to disturbances. ISA Trans. 2020, 99, 290–304. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust frequency control in an islanded microgrid: H∞ and μ-synthesis approaches. IEEE Trans. Smart Grid 2015, 7, 706–717. [Google Scholar] [CrossRef] [Green Version]
- Jain, M.; Saihjpal, V.; Singh, N.; Singh, S.B. An overview of variants and advancements of PSO algorithm. Appl. Sci. 2022, 12, 8392. [Google Scholar] [CrossRef]
- Gao, W.; Liu, S.; Huang, L. A global best artificial bee colony algorithm for global optimization. J. Comput. Appl. Math. 2012, 236, 2741–2753. [Google Scholar] [CrossRef] [Green Version]
- Ghavifekr, A.; Ghaemi, S.; Behinfaraz, R. A Modified Biogeography Based Optimization (BBO) Algorithm for Time Optimal Motion Planning of 5 DOF PC-based Gryphon Robot. Int. J. Eng. Work 2014, 1, 38–44. [Google Scholar]
- Sevinik Adigüzel, R.; Aksoy, Ü.; Karapinar, E.; Erhan, İ.M. On the solution of a boundary value problem associated with a fractional differential equation. Math. Methods Appl. Sci. 2020. early view. [Google Scholar] [CrossRef]
- Zhang, T.; Tong, C. A remark on the fractional order differential equations. J. Comput. Appl. Math. 2018, 340, 375–379. [Google Scholar] [CrossRef]
- Ma, J.H.; Chen, Y.S. Study for the bifurcation topological structure and the global complicated character of a kind of nonlinear finance system (I). Appl. Math. Mech. 2001, 22, 1240–1251. [Google Scholar] [CrossRef]
- Ma, J.H.; Chen, Y.S. Study for the bifurcation topological structure and the global complicated character of a kind of nonlinear finance system (II). Appl. Math. Mech. 2001, 22, 1375–1382. [Google Scholar] [CrossRef]
- Korobeinikov, A. Financial crisis: An attempt of mathematical modelling. Appl. Math. Lett. 2009, 22, 1882–1886. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Zhang, C. Synchronization of the Fractional Order Finance Systems with Activation Feedback Control. In Proceedings of the Artificial Intelligence and Computational Intelligence: Third International Conference, AICI 2011, Taiyuan, China, 24–25 September 2011; Proceedings, Part I 3. Springer: Berlin/Heidelberg, Germany, 2011; pp. 119–127. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | |||
|---|---|---|---|
| Controllers as Equation (20) with matrix K | 168.15 | 888.32 | 68.32 |
| BBO optimized method | 71.65 | 296.21 | 2.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Behinfaraz, R.; Bagheri, A.; Ghavifekr, A.A.; Visconti, P. Risk Control for Synchronizing a New Economic Model. Systems 2023, 11, 373. https://doi.org/10.3390/systems11070373
Behinfaraz R, Bagheri A, Ghavifekr AA, Visconti P. Risk Control for Synchronizing a New Economic Model. Systems. 2023; 11(7):373. https://doi.org/10.3390/systems11070373
Chicago/Turabian StyleBehinfaraz, Reza, Abdolmehdi Bagheri, Amir Aminzadeh Ghavifekr, and Paolo Visconti. 2023. "Risk Control for Synchronizing a New Economic Model" Systems 11, no. 7: 373. https://doi.org/10.3390/systems11070373