1. Introduction
Rolling bearing is one of the widely used parts in rotating machinery and equipment in the manufacturing system. It widely exists in the power end, transmission end, and execution end. Due to its complex working environment, it is very prone to failure. According to relevant statistics, about 30% of failures in rotating machinery are related to rolling bearings. Therefore, the research on fault diagnosis of rolling bearing is of great significance to ensure the production safety of relevant enterprises. However, in the actual operation process, due to the influence of external noise, receiving distance, and sensor working environment, the fault characteristics of this component are submerged in the interference of intensebackground noise, which has a significantimpact on fault diagnosis.
At present, the bearing fault diagnosis method based on signal processing has experienced three processes: time–domain analysis, frequency domain analysis, and time–frequency domain analysis. Because the fault signal of rolling bearing is non-stationary and nonlinear, the time–frequency domain analysis method is relatively suitable for processing this signal. Since the development of the time–frequency analysis method, the algorithms often used by relevant experts and scholars include Short-time Fourier transform (STFT) [
1,
2], S-transform [
3], Wigner Ville distribution (WVD) [
4], wavelet transform (WT) [
5,
6], etc., singular spectrum decomposition (SSD) [
7], spectral kurtosis (SK) [
8], morphological filtering (MF) [
9], and singular spectrum analysis (SSA) [
10], etc. However, these methods havetheir ownlimitations. For example, the window function of STFT is fixed, which is not conducive to the analysis of non-stationary bearing fault signals. The standard deviation of the S-transform in the Gaussian window function is fixed as the reciprocal of the frequency, which makes the time–frequency aggregation of the high-frequency part of the signal not ideal.WVD has good time–frequency aggregation, but there is cross-term interference. Although WT has the time–frequency local analysis ability of adjustable window, the scale of wavelet transform does not have a good corresponding relationship with the frequency of signal. In SK algorithm, how to set the parameters of passband center frequency and resonance bandwidth will affect its application effect. In MF algorithm, it is difficult to effectively select the type and size of the structuring element. In SSA algorithm, the embedding dimension and time delay of phase space reconstruction cannot be set automatically. After continuous development, relevant scholars have proposed many adaptive signal processing methods based on previous research results and applied them to the fault feature extraction of rolling bearing. For example, empirical mode decomposition (EMD) [
11], ensemble empirical mode decomposition (EEMD) [
12], local mean decomposition (LMD) [
13], etc., Jiang et al. [
14] proposed a fault feature extraction method combining EMD and 1.5-dimensional spectrum. In this method, the signal components decomposed by EMD are screened and reconstructed Then the reconstructed Hilbert envelope signal is analyzed by a 1.5-dimensional spectrum to obtain the characteristic fault frequency of bearing. The effectiveness of the proposed method is proved by experimental analysis. Fan et al. [
15] used EMD and pesudo-Wigner-Ville distribution (PWVD) to convert rolling bearing vibration signals with different fault degrees into contour time–frequency images, then extracted energy distribution values as features, and constructed a fault diagnosis model based onfuzzy c-means (FCM). Experimental results show that this method has high recognition accuracy. Hou et al. [
16] proposed a fault diagnosis method composed of EEMD, permutation entropy (PE), and Gath Geva (GG) clustering algorithm to solve the problem that it is difficult to identify the fault type of rolling bearing. Experimental results show that the proposed fault diagnosis method can achieve better clustering results. Liang et al. [
17] proposed a fault diagnosis method based on long-term and short-term memory network (LSTM) and LMD, to improve the defects of the LMD method. The results show that the method successfully extracts the characteristic frequencies of rolling bearing. Although the above time–frequency analysis methods have achieved certain results, they are based on the principle of recursive decomposition, so they have not been well solved in the aspects of modal aliasing and endpoint effect. To solve this problem, Dragomiretskiy et al. [
18] proposed a new adaptive decomposition method variational modal decomposition. The algorithm makes the decomposition result stable through the construction of the variational problem and is applied to the fault diagnosis of rotating machinery. Ye et al. [
19] decomposed the bearing vibration signal by the VMD method and introduced the characteristic capability ratio criterion to screen the qualified signal components for reconstruction. Then, the multi-dimensional features of the signal are extracted and input into the particle swarm optimization (PSO) andsupport vector machine (SVM) classification model for fault diagnosis. The results show that the proposed method has higher recognition accuracy than the existing methods. Li et al. [
20] proposed a fault diagnosis method combining VMD and fractional Fourier transform (FRFT) to solve the problem that it is difficult to extract fault features and over decomposition when applying the VMD method to rolling bearing fault diagnosis. By analyzing the results of simulation experiments, the method has a good effect. Xing et al. [
21] combined VMD, Tsallis entropy, and fuzzy c-means clustering (FCM) and applied them to fault diagnosis. Through the analysis of the measured vibration signal of rolling bearing, the results show that this method can obtain better results than EMD and LMD methods.
The signal processed by time–frequency analysis contains a lot of noise, which has a specificimpact on the fault feature extraction. Therefore, the signal needs further processing. In recent years, the technology based on blind source separation has become one of the research hotspots. This technology optimizes multiple observation signals according to the principle of statistical independence and decomposes them into several independent components, so as to achieve the purpose of signal enhancement. Robust independent component analysis (RobustICA), as an algorithm with outstanding advantages in blind source separation methods, has been widely used in signal analysis, fault diagnosis, and other fields because of its good effect in signal-to-noise separation effect and calculation efficiency [
22,
23,
24]. Yang et al. [
25] proposed a signal noise-reduction method based on the combination of complementary ensemble empirical mode decomposition (CEEMD) and RobustICA to reduce the noise of pipeline blockage signals. Through the processing and analysis of simulation signals and pipeline blockage detection signals, the results verify the effectiveness of the proposed method. Yao et al. [
26] studied the noise reduction of internal combustion engine signals by using the combination of Gammatone filter bank and RobustICA. Experiments show that the classification effect of signal and noise obtained by this method is good. Zhao et al. [
27] combined EEMD, RobustICA, and Prony algorithms and applied them to the identification of low-frequency oscillation signals in the power system. Experiments show that the proposed method has a strong anti-interference ability and can effectively suppress noise.
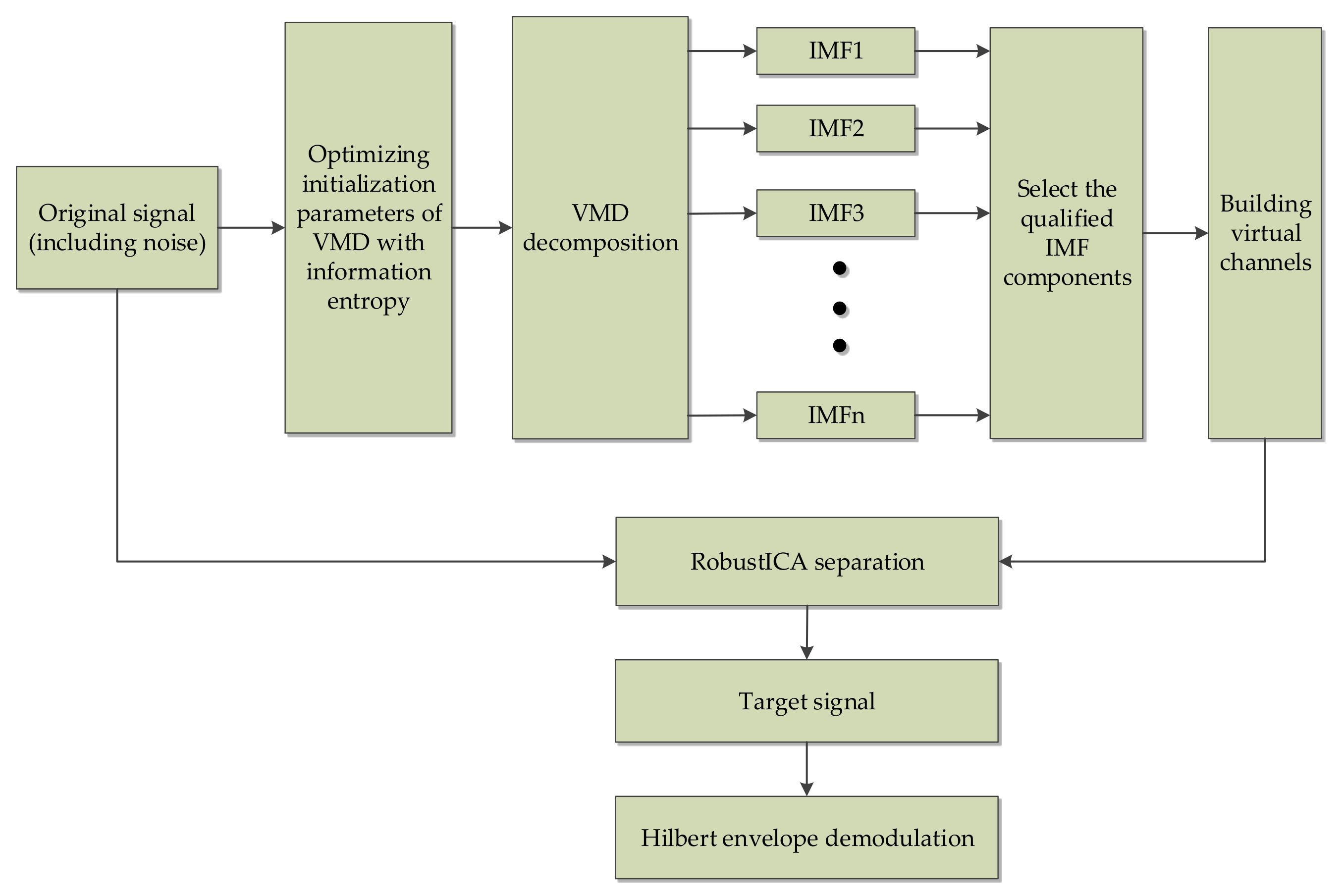
In this paper, a fault feature extraction method based on VMD optimized with information entropy and RobustICA is proposed. Firstly, the fault signal is decomposed by VMD, and the number of modal components k and penalty parameters α are selected according to the optimization principle of minimum information entropy. Then, the optimal parameters are substituted into VMD and the signal decomposition operation is carried out. Secondly, the signal components are filtered through the constructed signal component screening criteria, and the observation signal channel is constructed, so as to realize the signal-to-noise separation based on RobustICA. Finally, the denoised signal is demodulated by Hilbert envelope, and the fault characteristic frequency is extracted.
The main contributions of this paper are summarized as follows:
- (1)
A method of optimizing VMD by information entropy is proposed to set initialization parameters so that VMD can adaptively expand signal decomposition;
- (2)
In this study, kurtosis and cross-correlation coefficient criteria are comprehensively used to evaluate the advantages and disadvantages of each eigenmode function, and the optimal eigenmode function is selected to construct the observation signal channel, which completes the separation of useful signal and noise signal; and
- (3)
The effectiveness and feasibility of the proposed method are verified by experimental analysis using simulation signals and actual bearing data sets.
The structure of this paper is as follows.
Section 2 introduces the basic principles of VMD, information entropy, and the RobustICA algorithm.
Section 3 introduces the specific implementation process of the fault feature extraction method based on information entropy optimization VMD and RobustICA. In
Section 4, the stimulation signal is experimentally studied by using the proposed method. In
Section 5, the effect of the method is further verified by the actual bearing fault signal experiment.
Section 6 is the discussion and conclusions.
2. Basic Methods
2.1. VMD
Variational modal decomposition (VMD) is developed by University of California scholars Dragomiretskiy et al., in 2014 [
18]. Based on Wiener filtering, this method searches for the optimal solution of the input signal within the framework of variational model. It can adaptively update the center frequency, bandwidth, and corresponding sub signals, and decompose the independent components of the signal from the frequency domain. As a non-recursive signal analysis method, the core idea of the VMD method is to determine the intrinsic mode function (IMF) by solving the variational problem. Therefore, in the VMD algorithm, the IMF component obtained by signal decomposition is different from that in EMD and LMD algorithms. The original signal is non recursively decomposed into several IMF components with limited bandwidth:
In the above formula,
is the instantaneous amplitude of
, and
.
is phase and
.
is the instantaneous phase of
.
In the above formula, can be regarded as a harmonic signal, its amplitude is and its frequency is .
It is assumed that each mode has a limited bandwidth with central frequency, and the central frequency and bandwidth will be updated continuously in the decomposition process. Then the variational problem can be expressed as finding r modal functions and minimizing the estimated bandwidth forthe sum of all modal functions. The sum of modes is the input signal.VMD algorithm can obtain k discrete modes by decomposing signal X(t). Then, the frequency bandwidth of each modal signal is estimated in the following manner.
(1) Hilbert transform is extended to the modal function, and the marginal spectrum is obtained.
(2) Each estimated center band is modulated to the corresponding fundamental band.
(3) The square
L2 norm of the demodulated signal gradient is obtained.
By constructing the VMD variational constraint model based on the above formula, the following formula can be formed.
In the above formula, is the function set of each mode. is the central frequency set. is the unit pulse function. is the derivative of the function over time t. s.t. is the constraint. is the original input signal, where k is the number of decompositions.
By introducing penalty factor and Lagrange multiplication operator b, the constrained model problem in Equation (5) can be transformed into a non-constrained model problem, as in Equation (6).
By constantly iteratively searching for the minimum point of Lagrange function L, the original input signal a will be decomposed into k modal functions .
When using VMD decomposition algorithm to adaptively decompose the signal, the decomposition parameters need to be set in advance. Theoretical research shows that the parameters that have a great impact on the decomposition effect mainly include the number of decomposition k and the penalty parameter α. Therefore, setting these two parameters only by experience will bring great errors to the decomposition results of VMD. Among them, the size of k value is directly related to the decomposition effect of VMD. If the value of k is too small, it will lead to under decomposition of the signal, and the resulting signal is not completely decomposed into components. If the value of k is too large, the signal will be decomposed too much, resulting in over decomposition. At the same time, the value of a has a certain impact on the bandwidth of the decomposed component. If the value of a is too small, the bandwidth of the decomposed component will be too large, and some components will include other components. If the value of a is too large, the bandwidth of the decomposed component will be too small, and some components in the decomposed signal may be lost.
2.2. Information Entropy
The concept of entropy originates from thermodynamics and is used to describe the disorder degree of the system. Based on this idea, scholar Shannnon proposed the concept of information entropy [
28]. Information entropy is a concept used to measure the amount of information in information theory. When a system is more orderly, the value of information entropy will be smaller. On the contrary, when the disorder degree of the system becomes higher, the value of information entropy will become larger. The calculation formula of information entropy is as follows:
where
represents the probability of occurrence of an event
in the system, and
n represents the number of samples to be analyzed.
2.3. Robust Independent Component Analysis
RobustICA algorithm is proposed by Zarzoso et al. [
29,
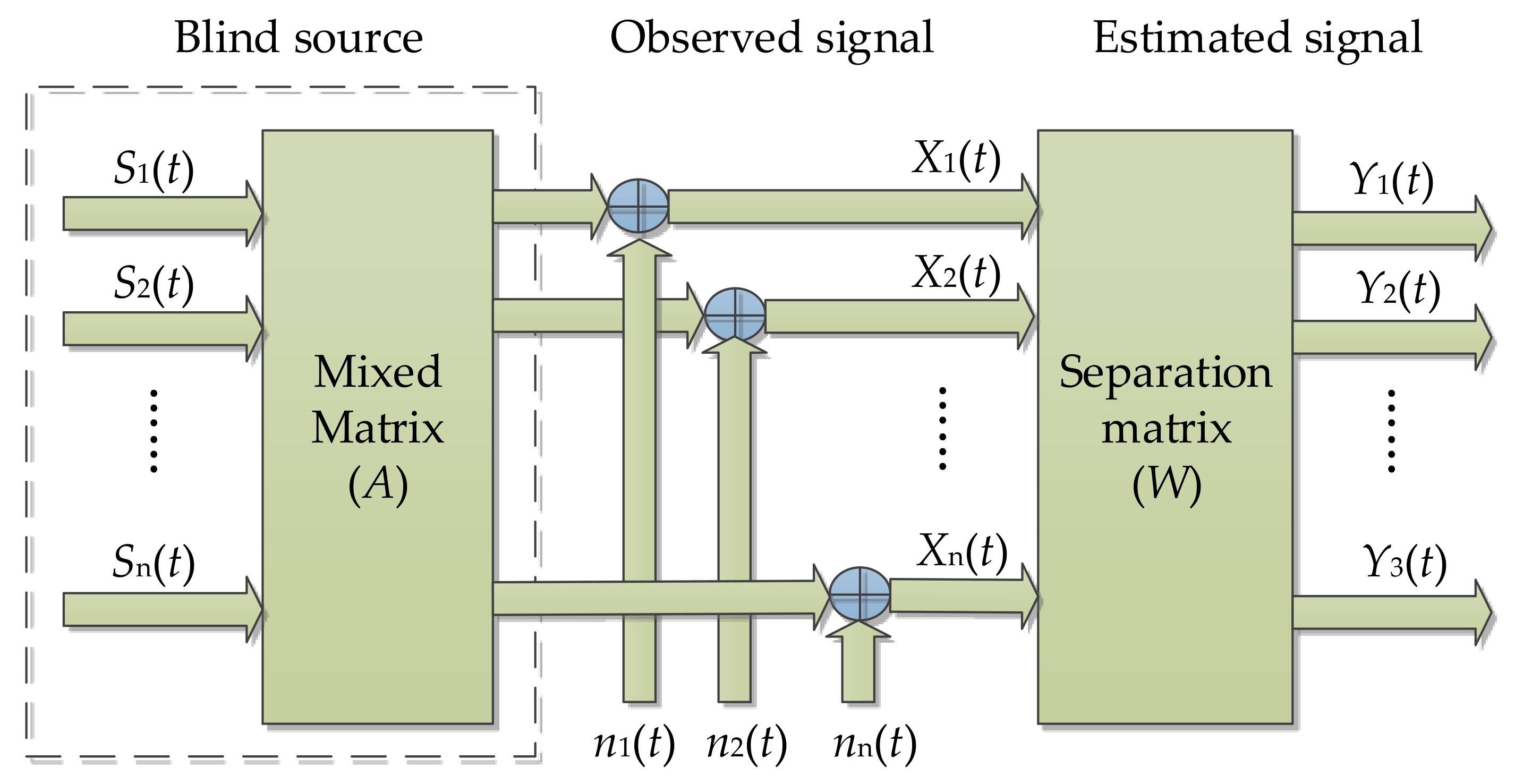
30]. Because the observation data used in it does not need whitening preprocessing, it can only meet the condition that its mean value is zero, so the problem of introducing error is avoided. The algorithm realizes the kurtosis optimization by using linear search and algebraic calculation of the global optimal step size. The frame of independent component analysis is shown in
Figure 1 [
31]. Assuming that the mixed data containing noise is
X and the output signal is
Y =
WX, the kurtosis formula can be expressed as follows:
where
E {·} represents mathematical expectation,
W represents separation matrix.
An exact linear search is performed by using the absolute value of kurtosis as the objective function:
The search direction
g is usually gradient, namely.
. It is expressed as follows:
where
K indicates kurtosis.
E {·} represents mathematical expectation.
indicates gradient.
In the process of each iterative operation, the operation steps of RobustICA is as follows:
(1) Find the coefficients of the optimal step polynomial:
(2) Extract the root of the optimal polynomial (12).
(3) In the search direction, the root value that maximizes the kurtosis is selected as the optimal step
(4) Update the separation vector: ;
(5) Normalized the separation vector: ;
(6) If there is no convergence, return to Step (1), otherwise the solution of the separation vector is completed.
4. Simulations and Comparative Analysis
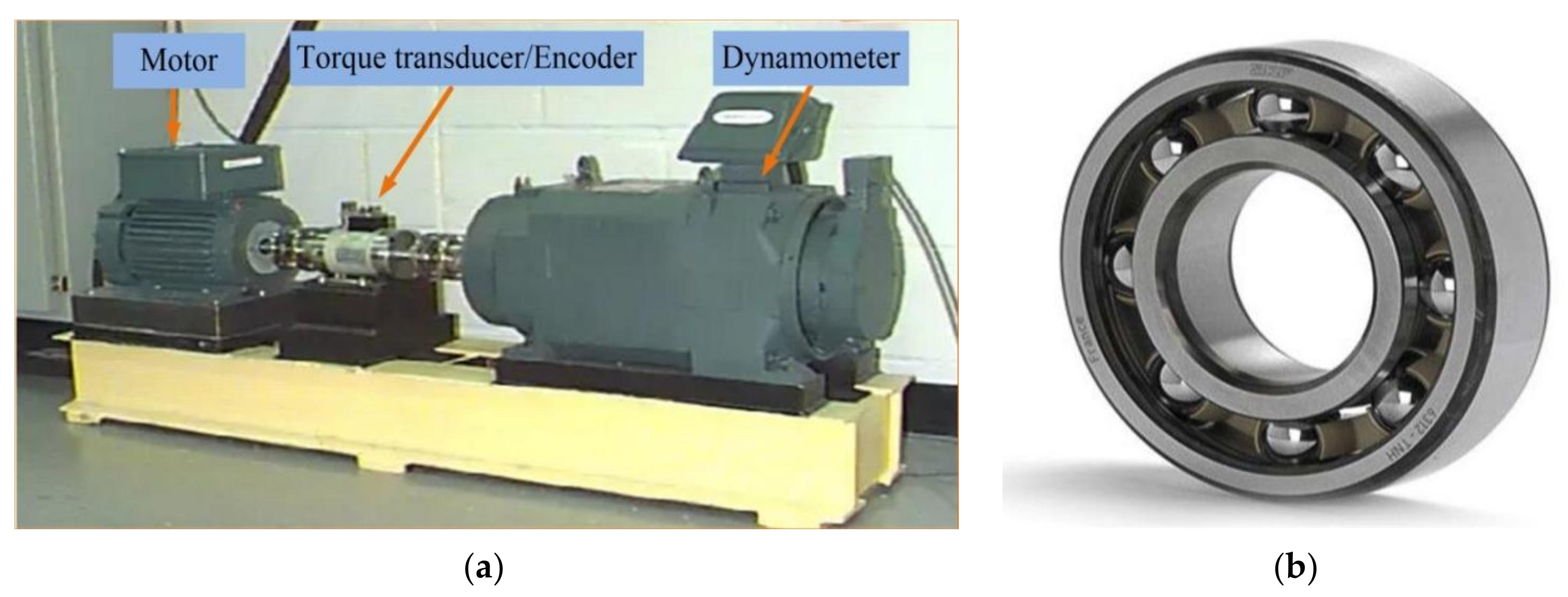
Bearing is one of the most commonly used general parts in all kinds of rotating machinery. It plays a role in bearing and transmitting load in mechanical equipment, and it is very prone to failure. Therefore, to verify the performance of the algorithm proposed in this paper, a typical model was used to simulate the periodic impact signal caused by bearing fault [
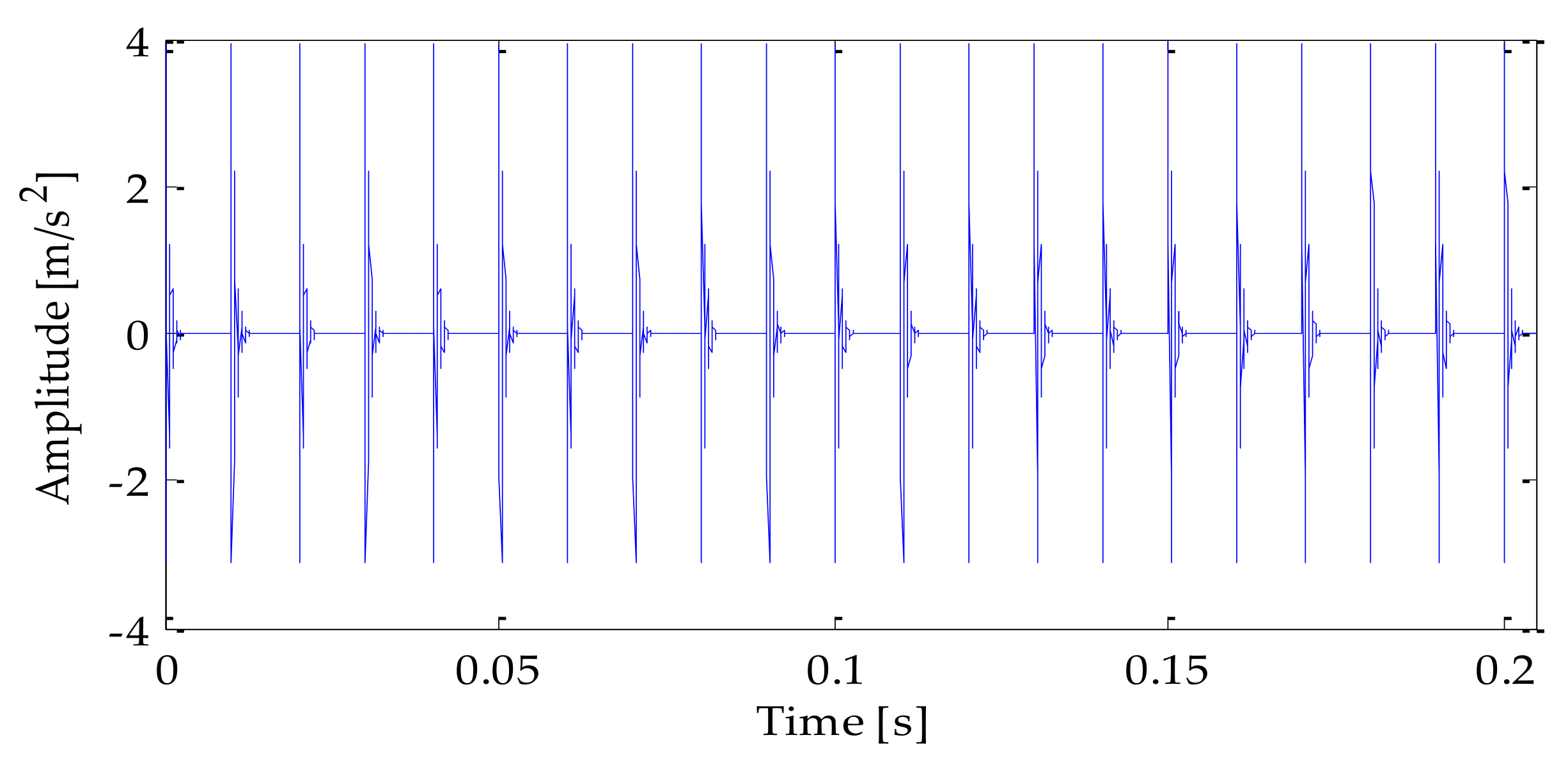
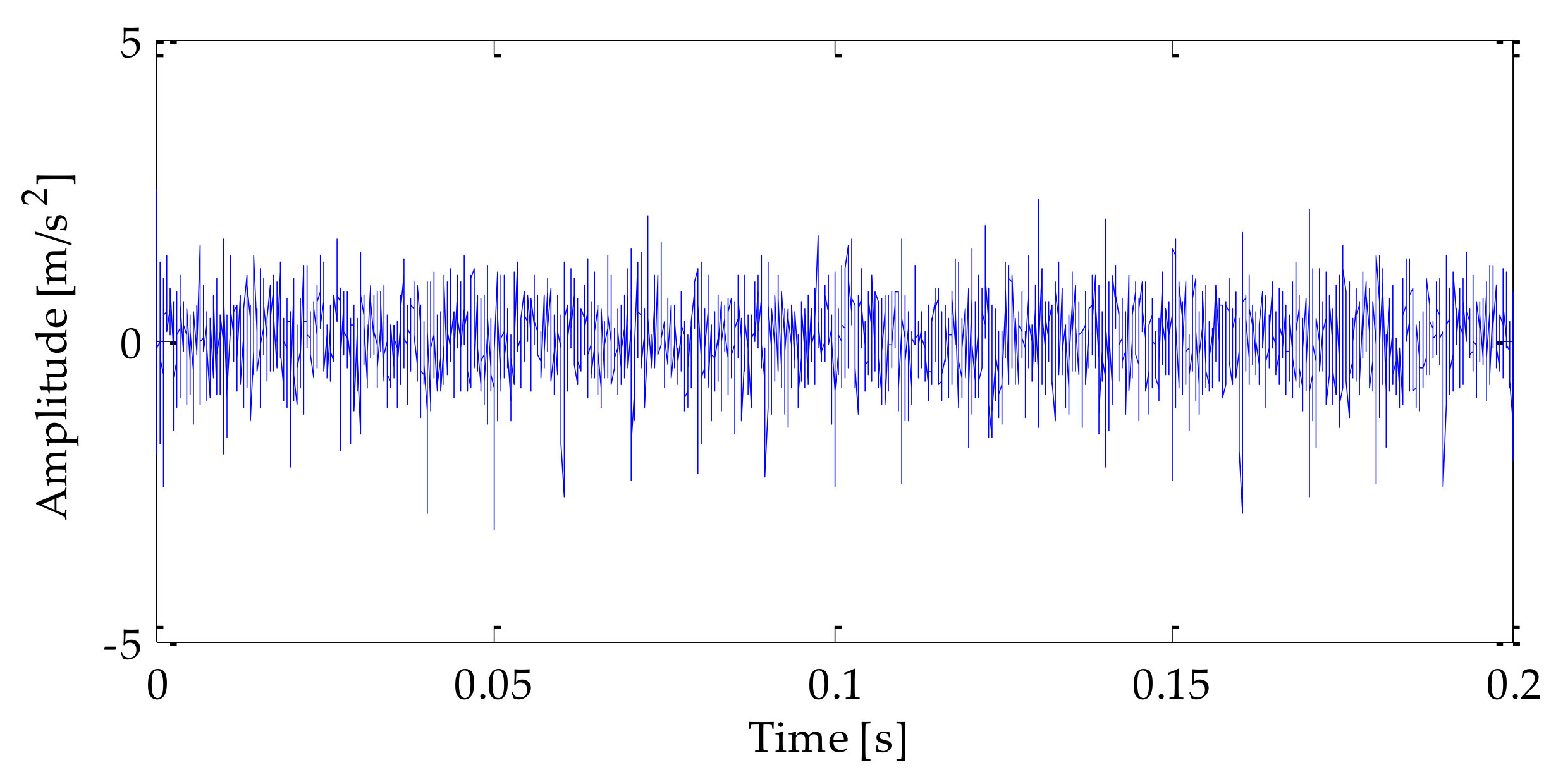
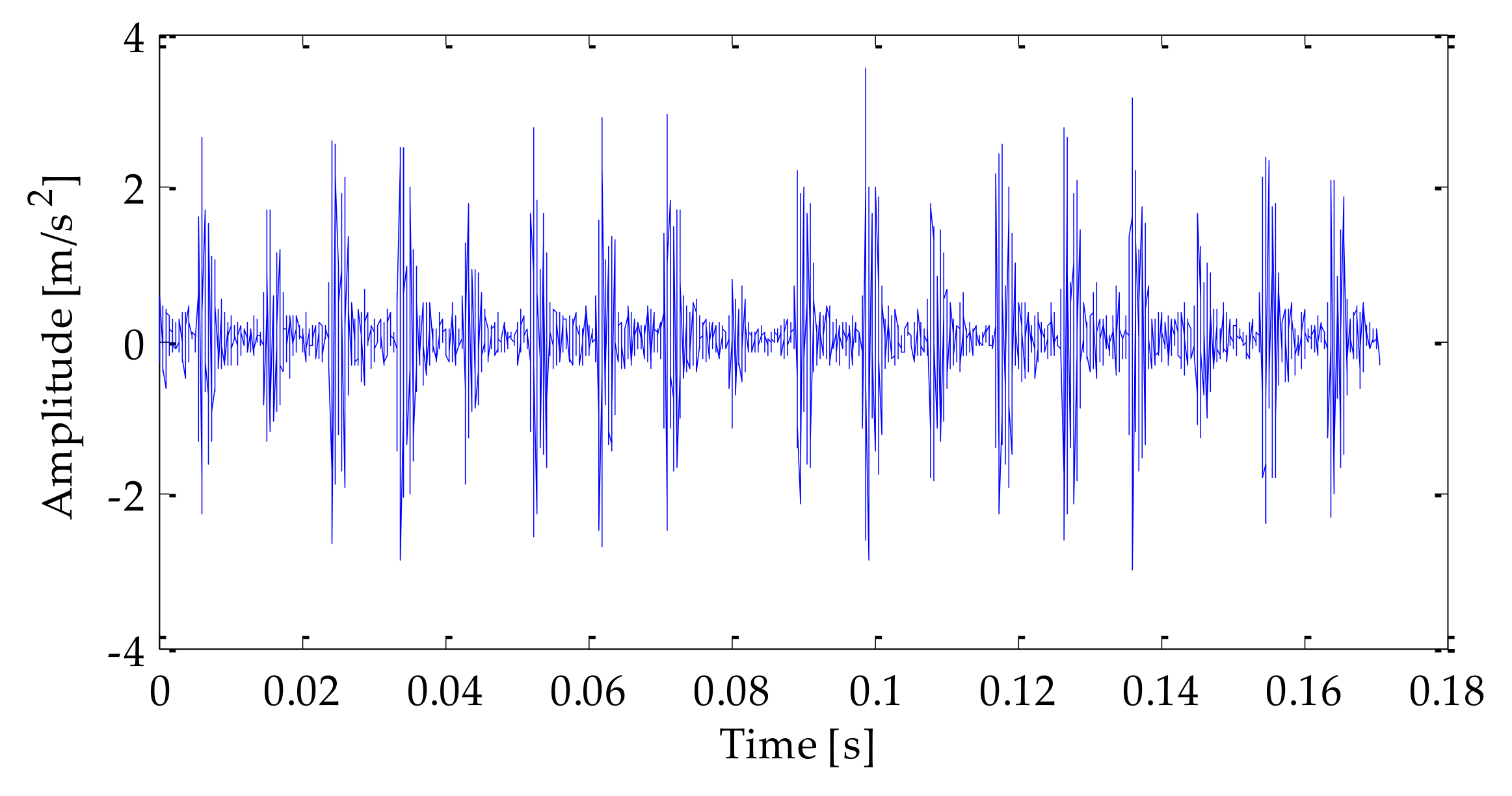
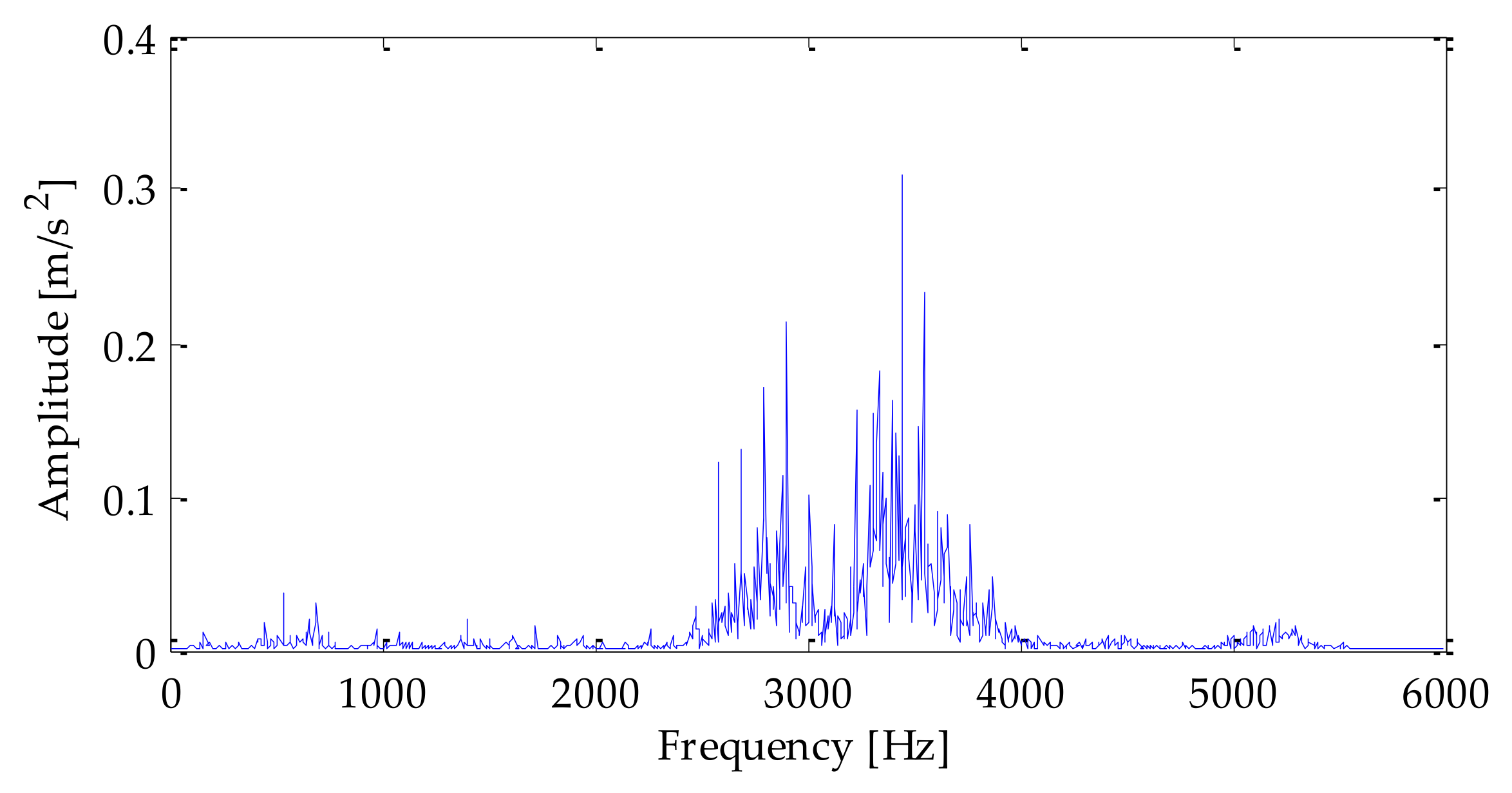
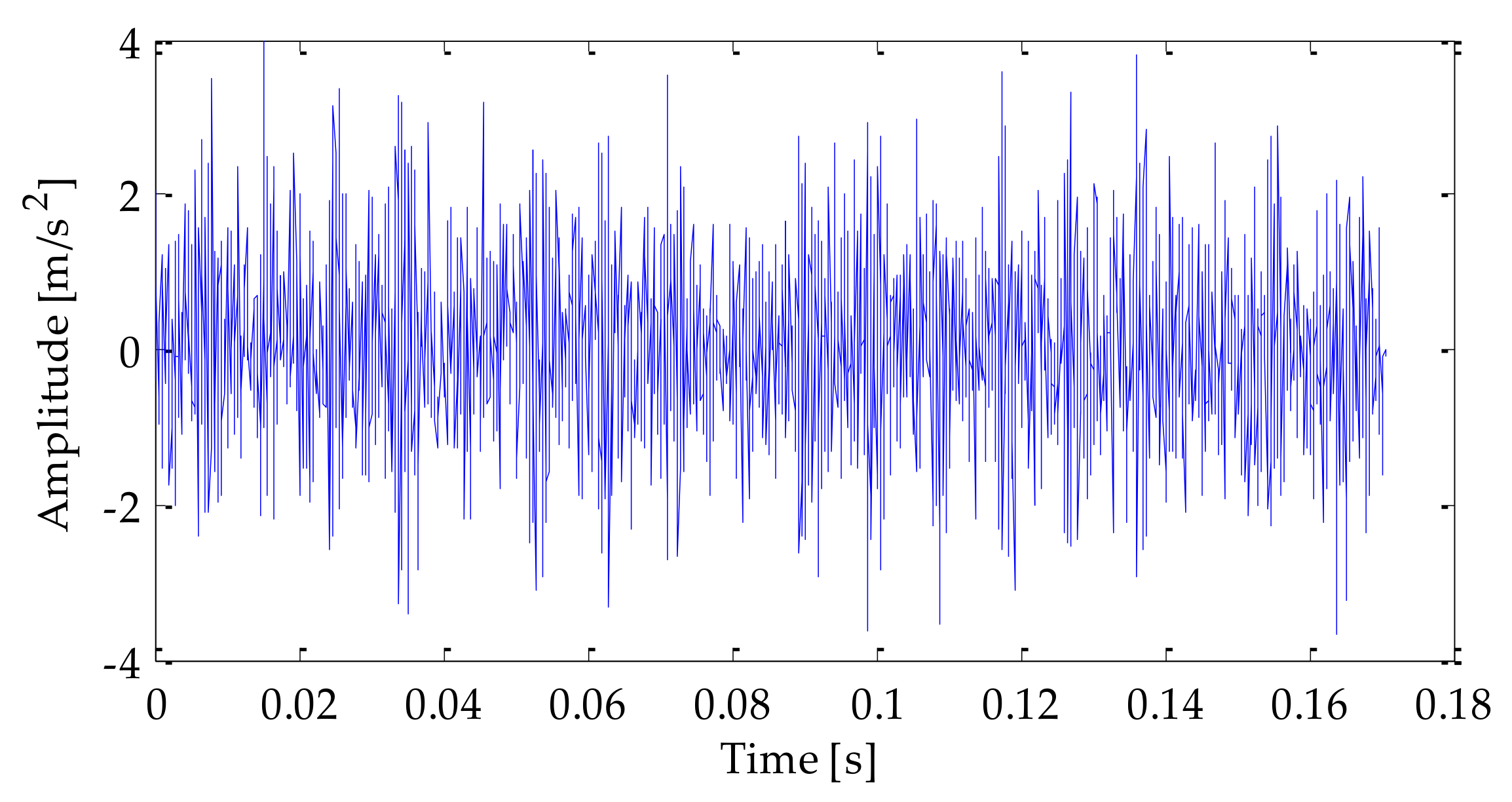
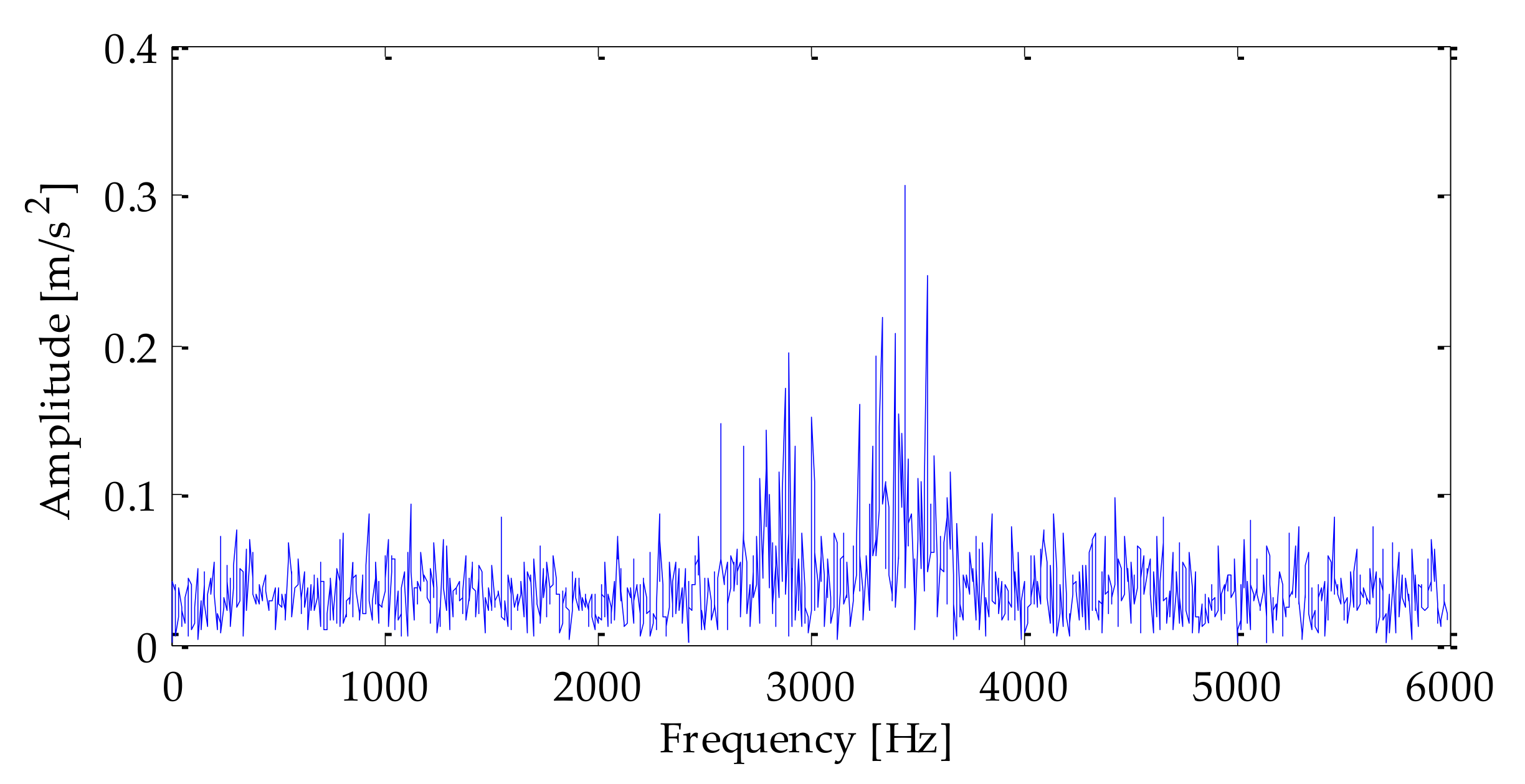
32]. Firstly, a set of periodic pulse signals was simulated to simulate the fault impact signal, and on this basis, Gaussian white noise was added to the fault impact signal to simulate the bearing fault vibration signal polluted by environmental noise. In this study, Matlab (version R2009a) was selected as the vibration signal modeling and simulation software to build the signal model. The expression of the simulated signal is as follows:
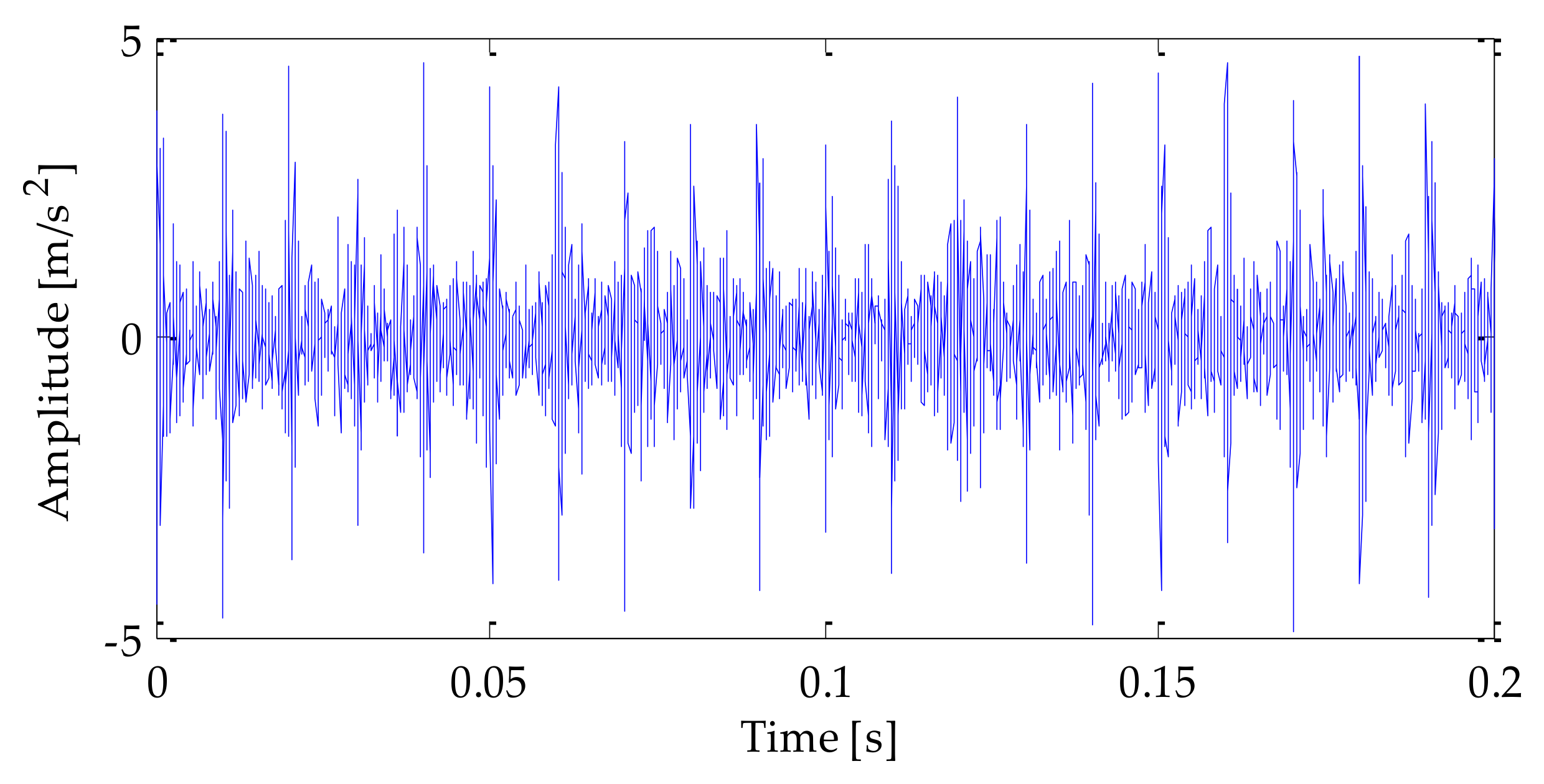
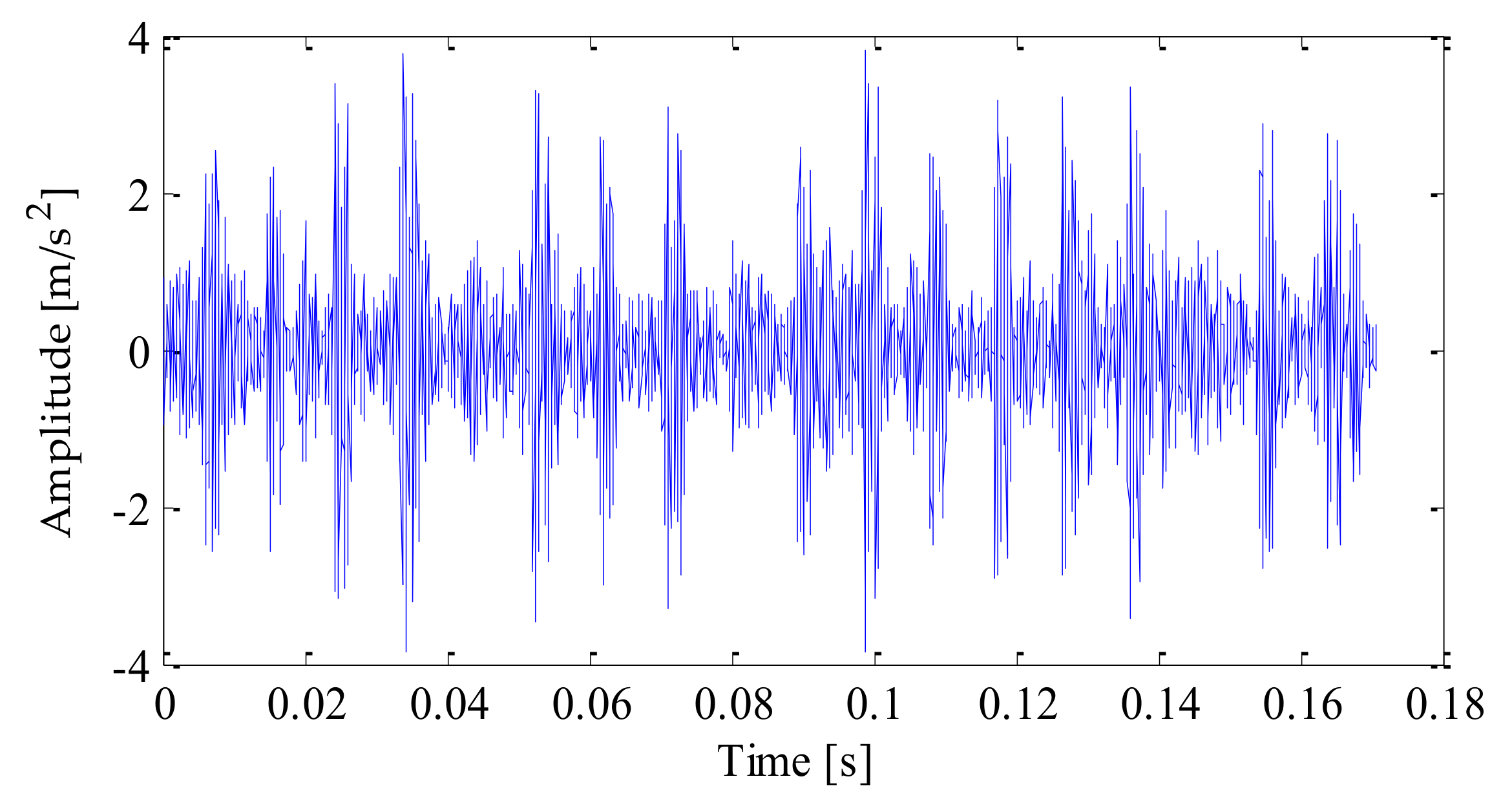
In the above formula: carrier frequency fn = 3000 Hz, displacement constant y0 = 5, damping coefficient ξ = 0.1, period T = 0.01 s, sampling frequency fs = 20 KHz, and number of sampling points n = 4096, where t represents the sampling time. Through calculation, it can be seen that the fault frequency f0 = 100 Hz. In order to simulate the noise interference of rolling bearing during operation, SNR = −5 dB white Gaussian noise was added to the original signal s(t).
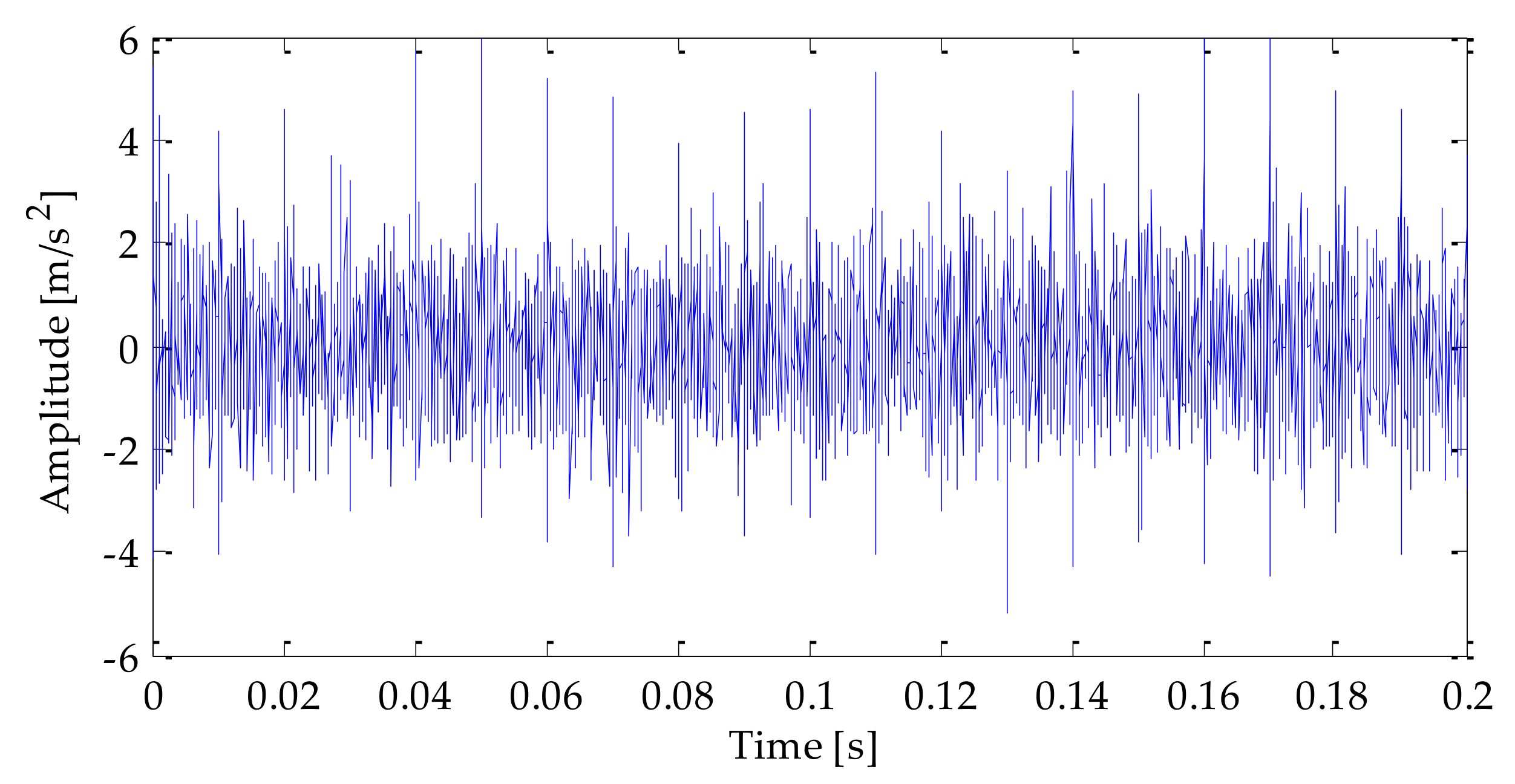
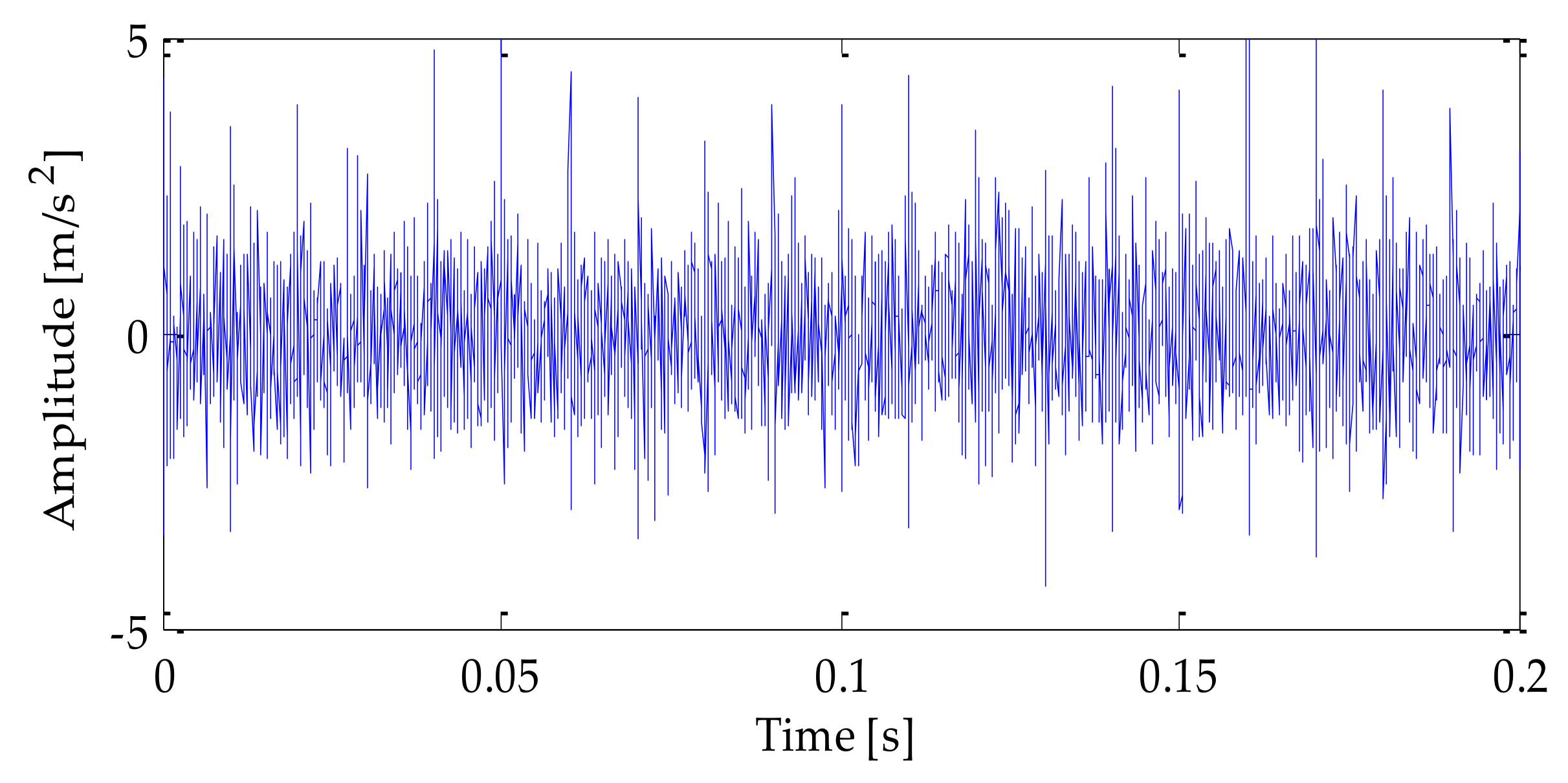
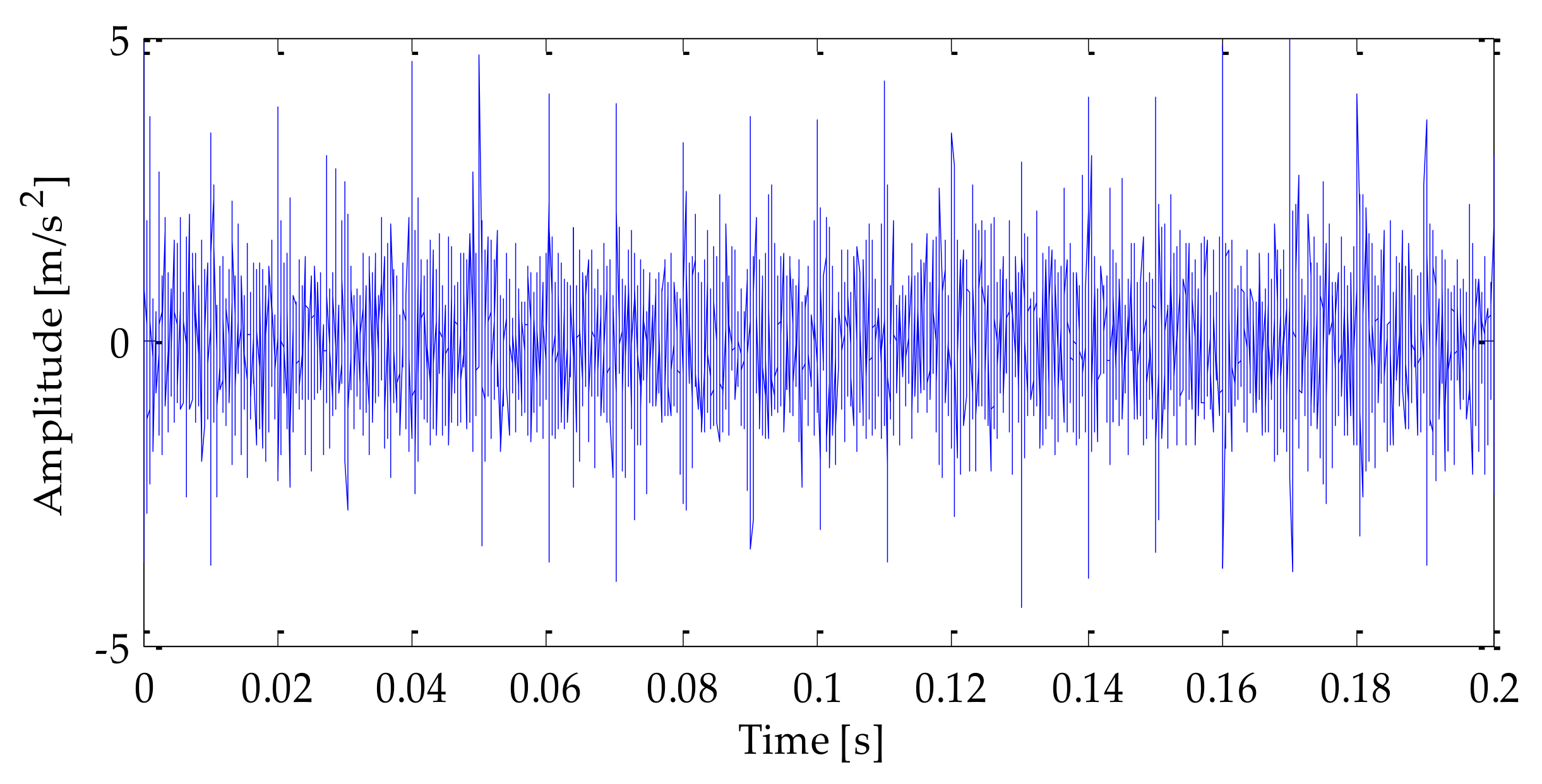
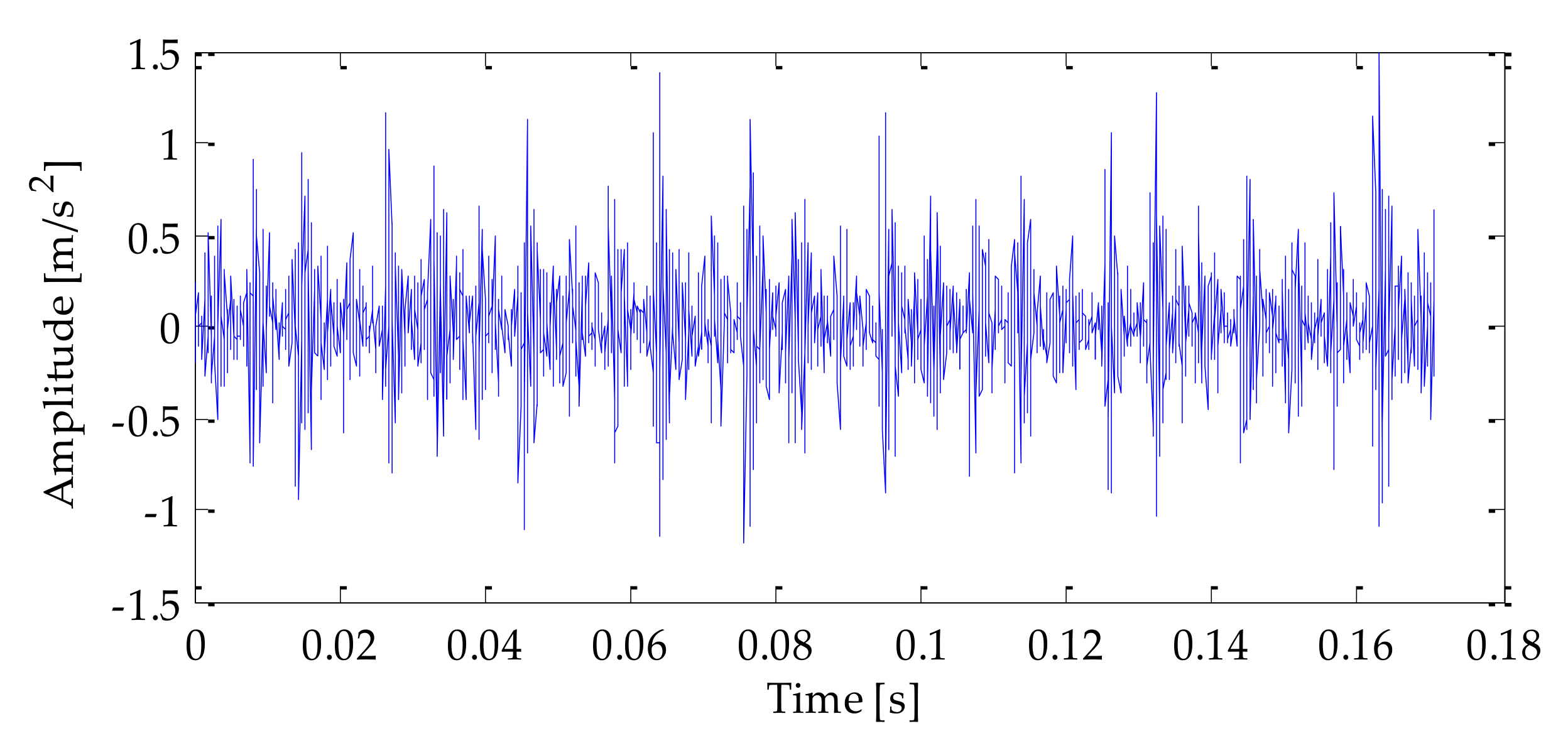
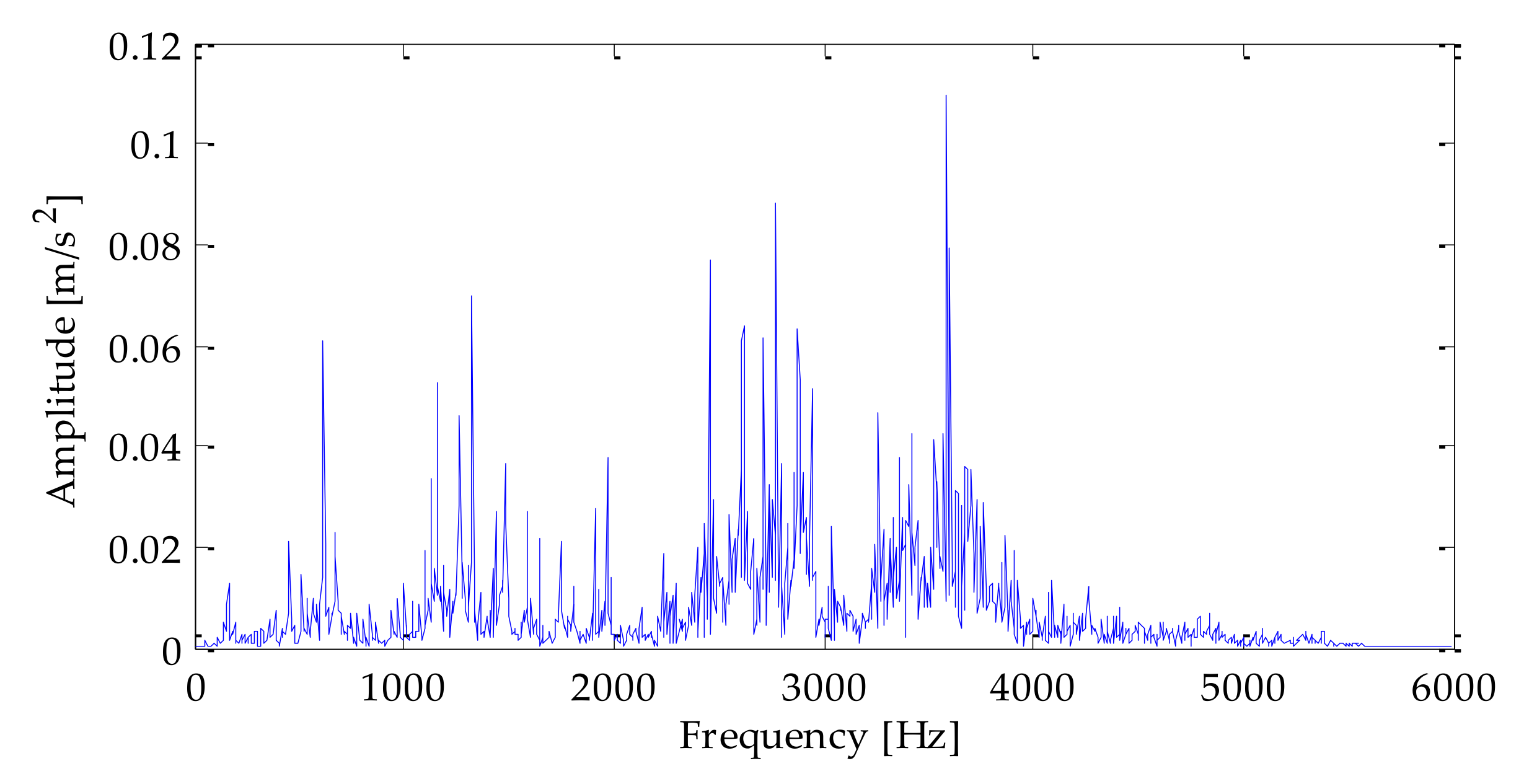
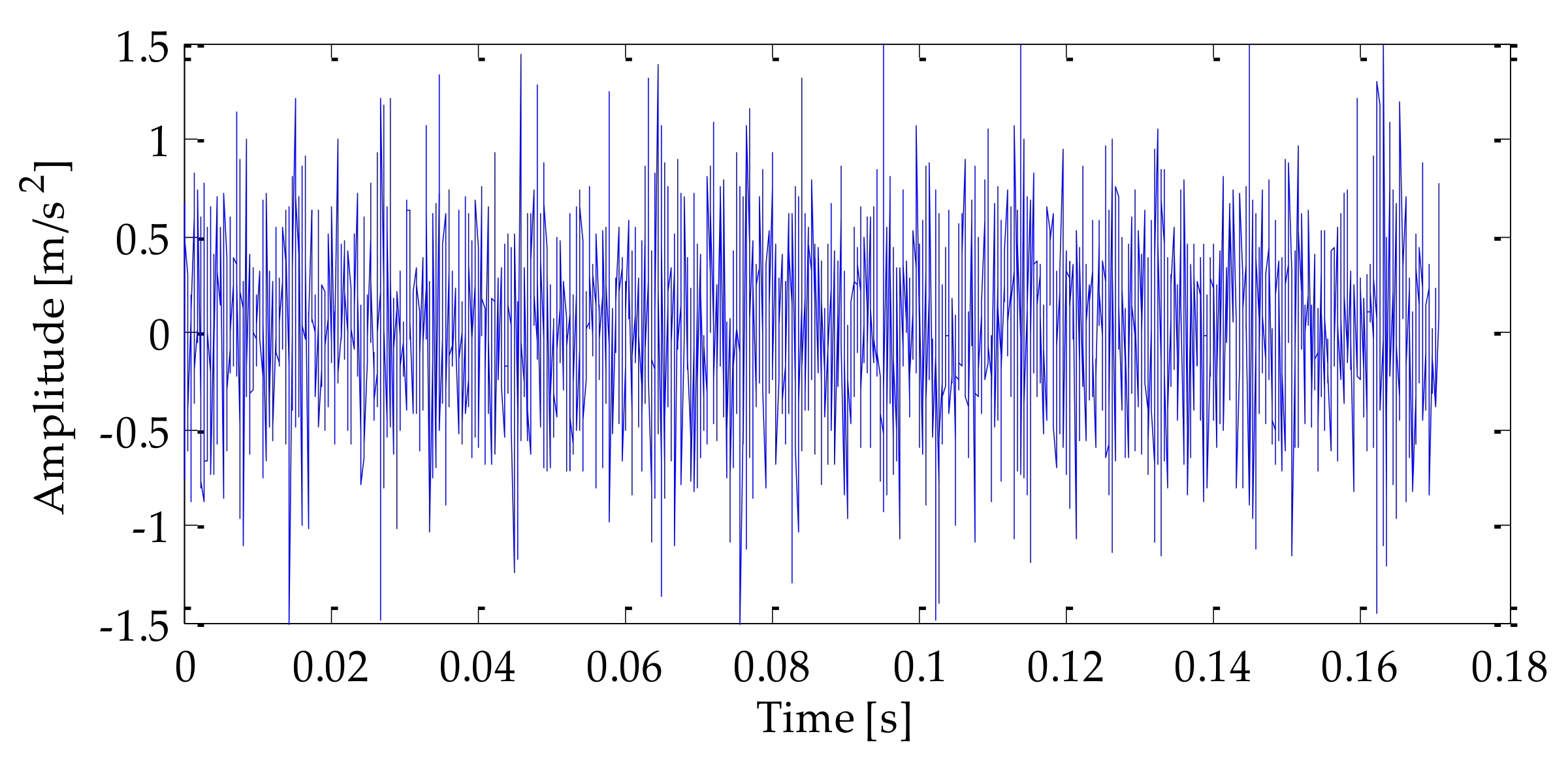
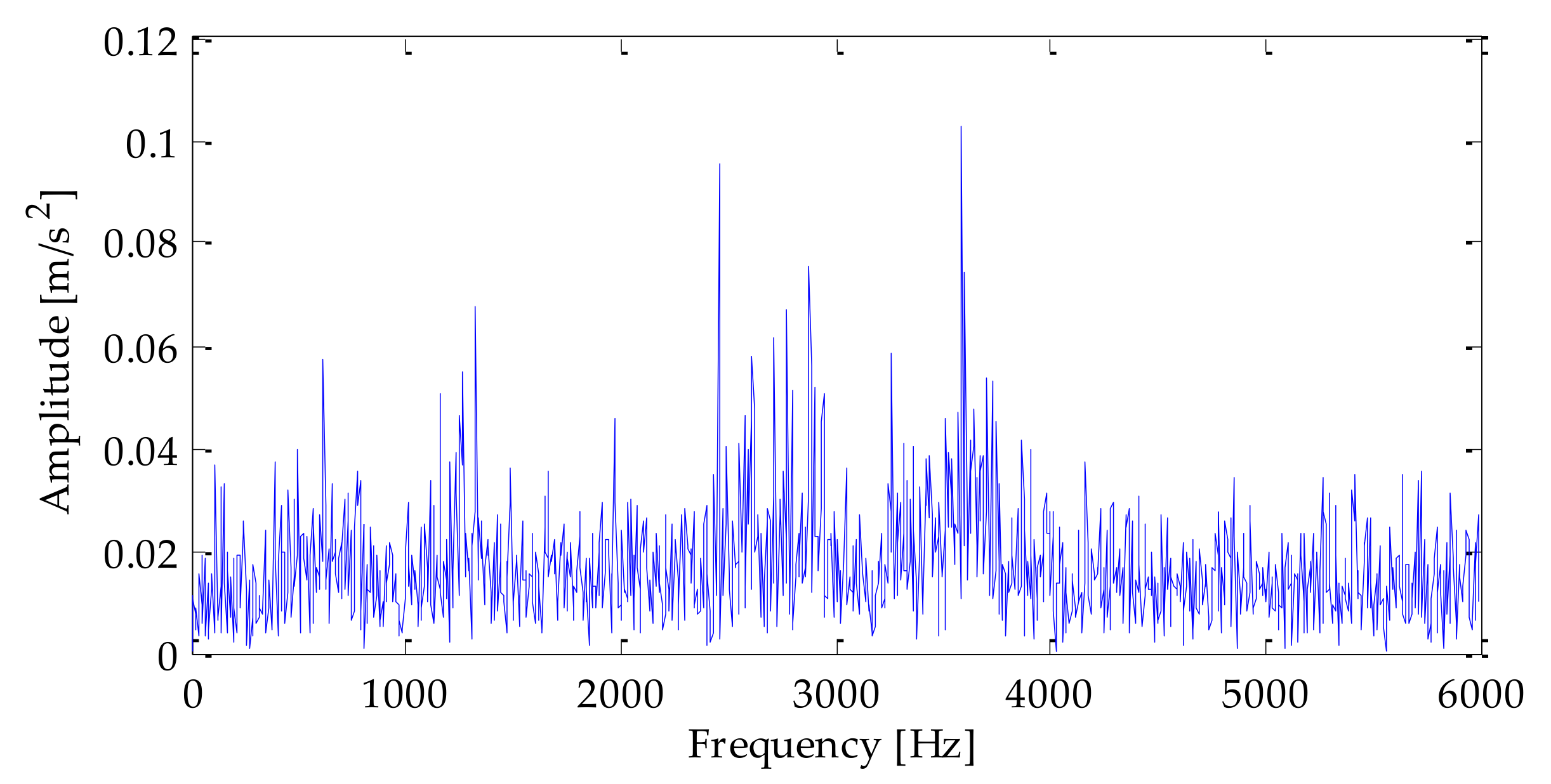
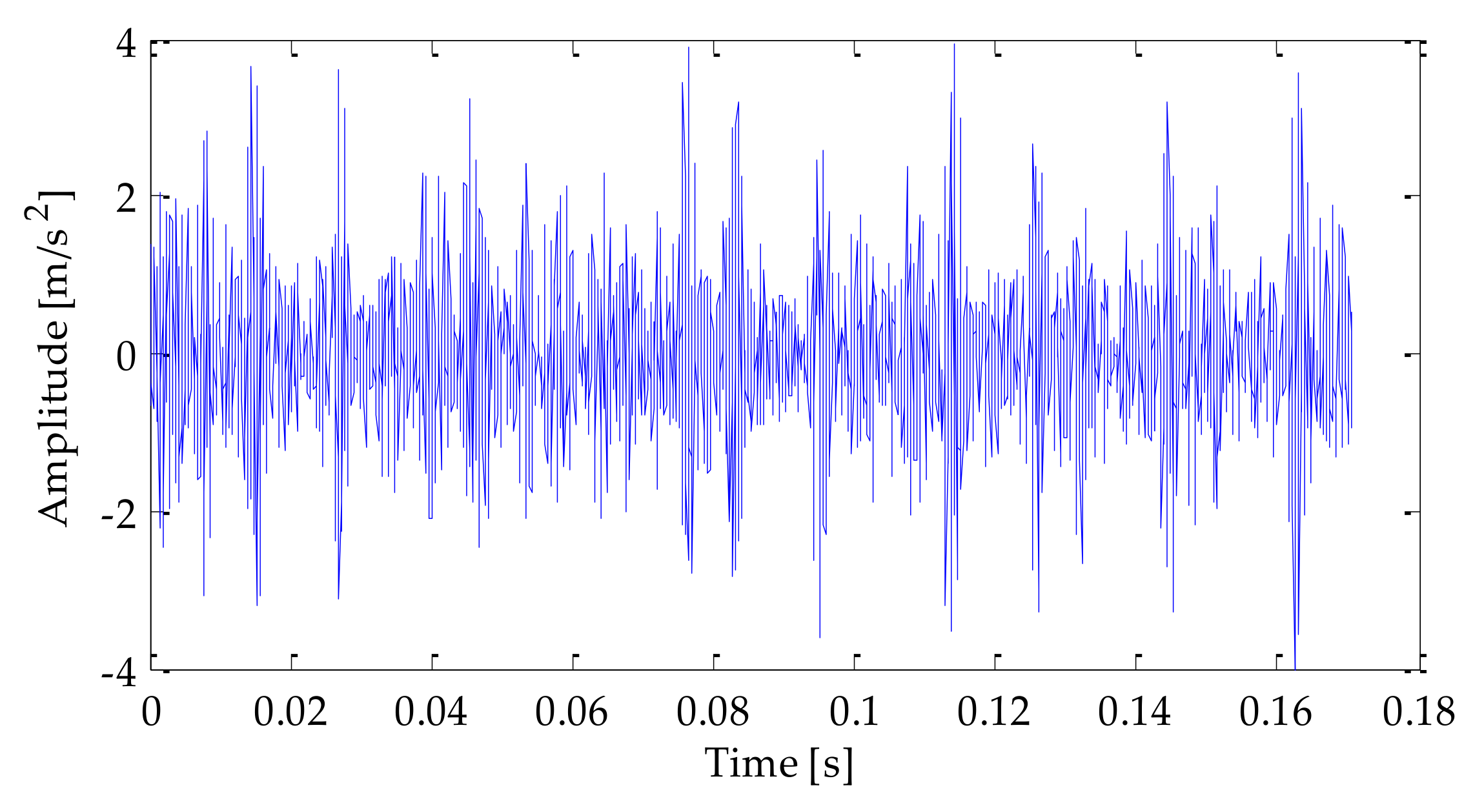
The time–domain waveform of the original signal is shown in
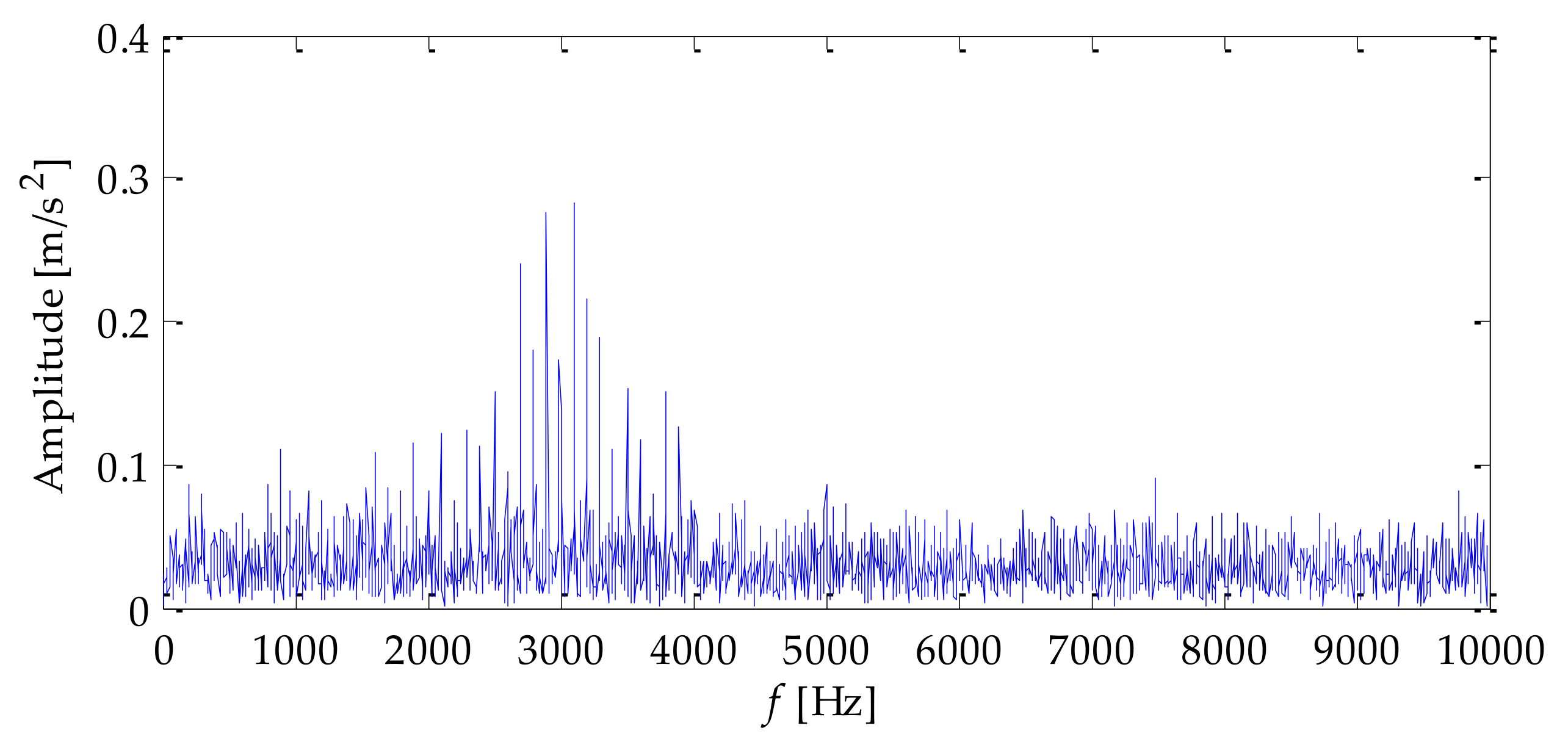
Figure 4. After adding noise, the time–domain waveform and frequency–domain waveform of the mixedsignal after adding noise is shown in
Figure 5 and
Figure 6. Analyzing the above diagrams showsthat most of the impact signal features were covered up under the interference of background noise, which brings some difficulty to the fault feature extraction.
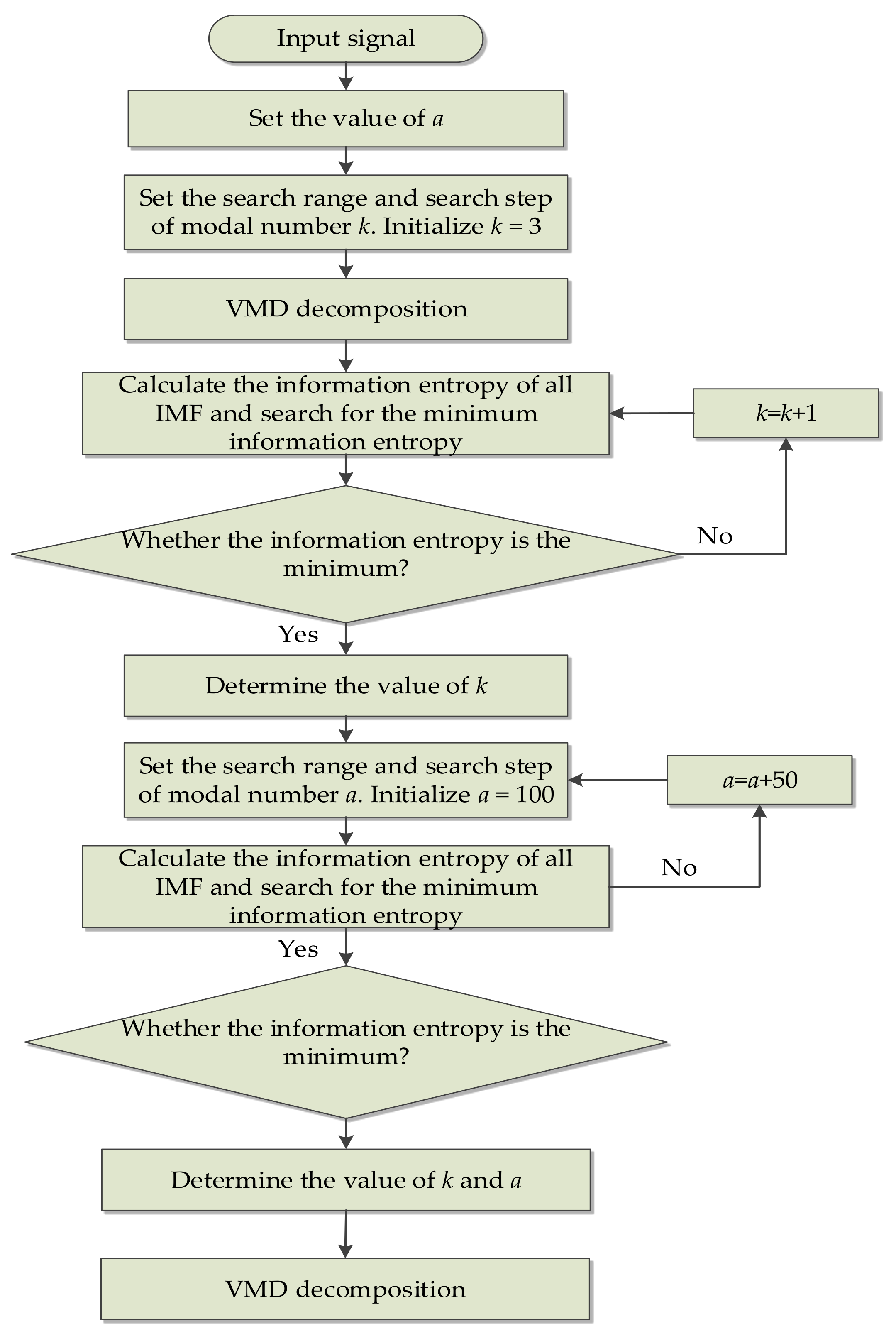
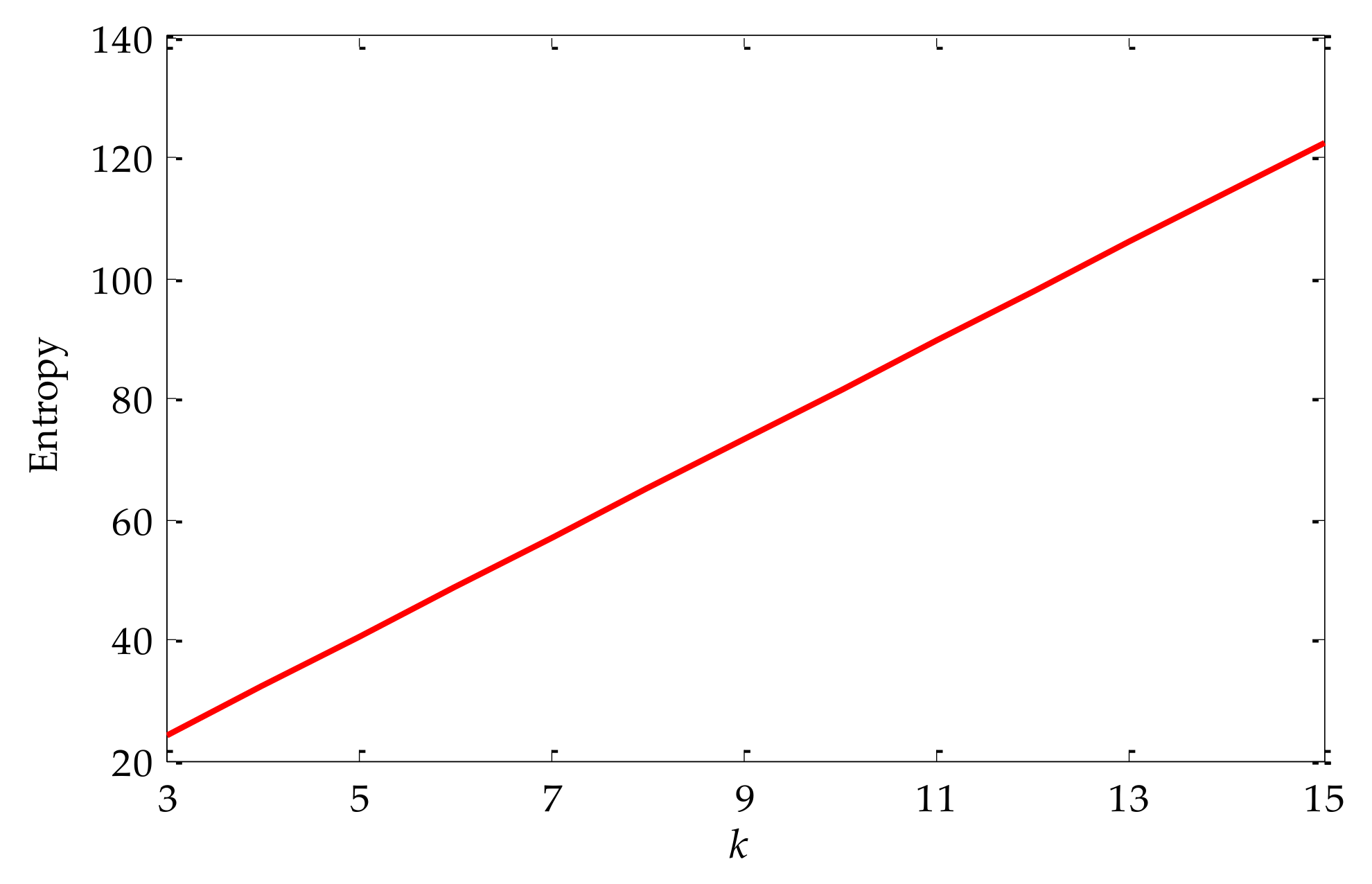
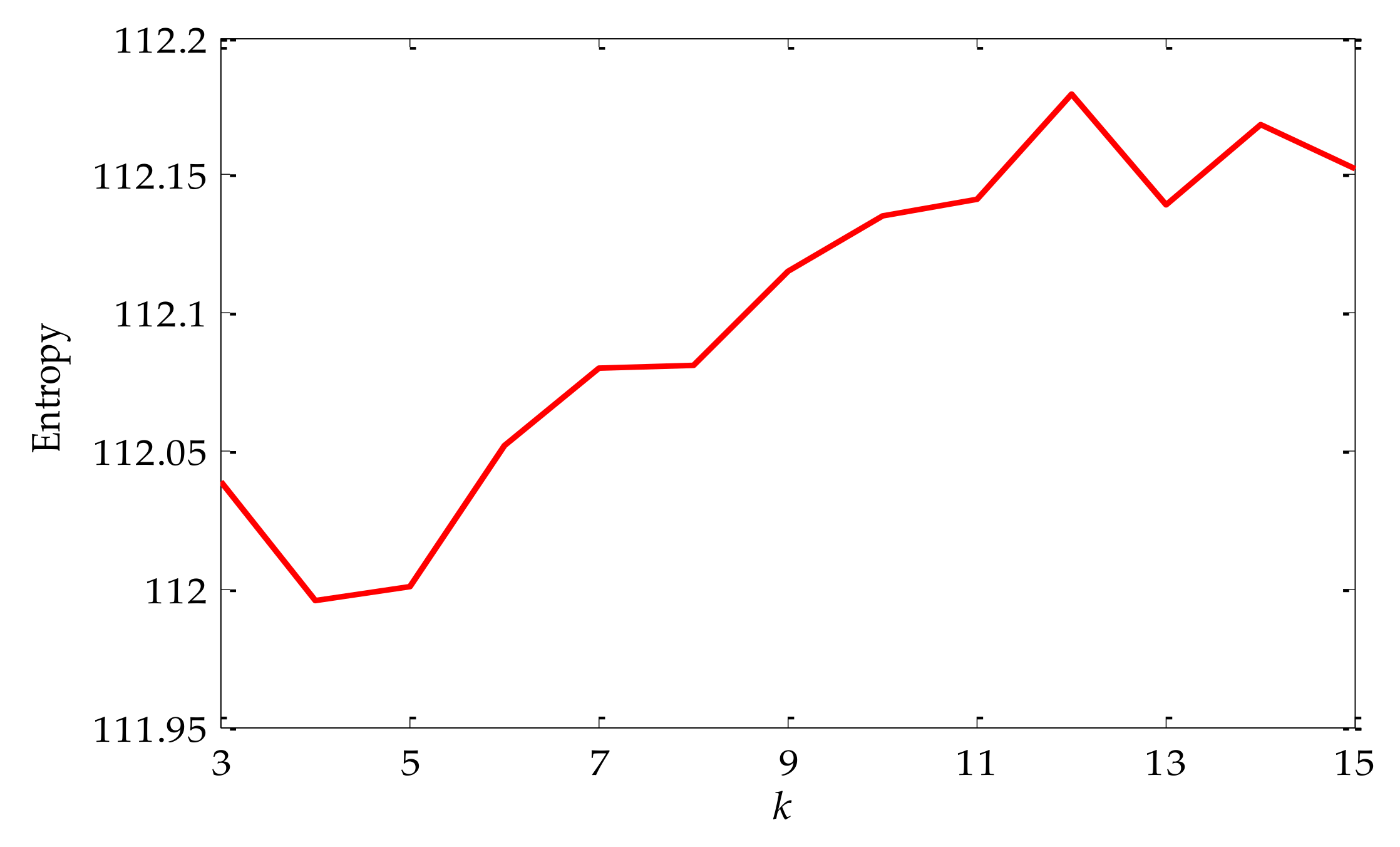
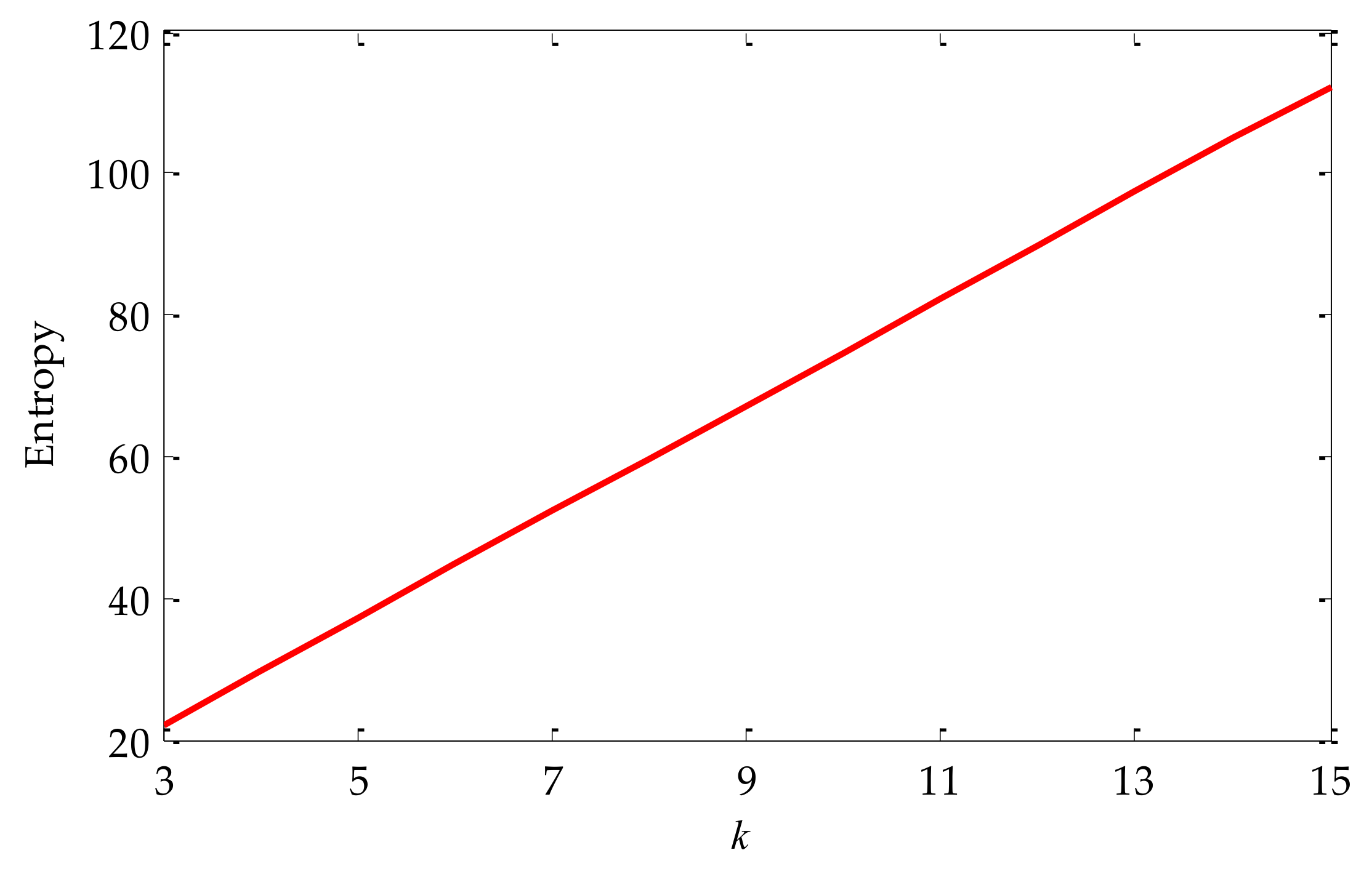
Since the mixed signal was severely interfered with by noise, next, the signal will be decomposed by VMD. Before VMD decomposition, information entropy must be used to optimize VMD to determine the parameters
k and
α in VMD. Firstly, our experiment used the default value a, which was 2500. Meanwhile, we initialized
k = 3, and the search range of
k was set to [
3,
15]. The value of optimal mode
k was searched according to the principle of minimum envelope spectral entropy. The relationship between
k and envelope spectral entropy is shown in
Figure 7. From the transformation trend of the value of
k in the figure, it can be seen that with the increasing value of
k, the corresponding envelope spectral entropy was also increasing. Therefore,
k = 3 was taken as the optimal value.
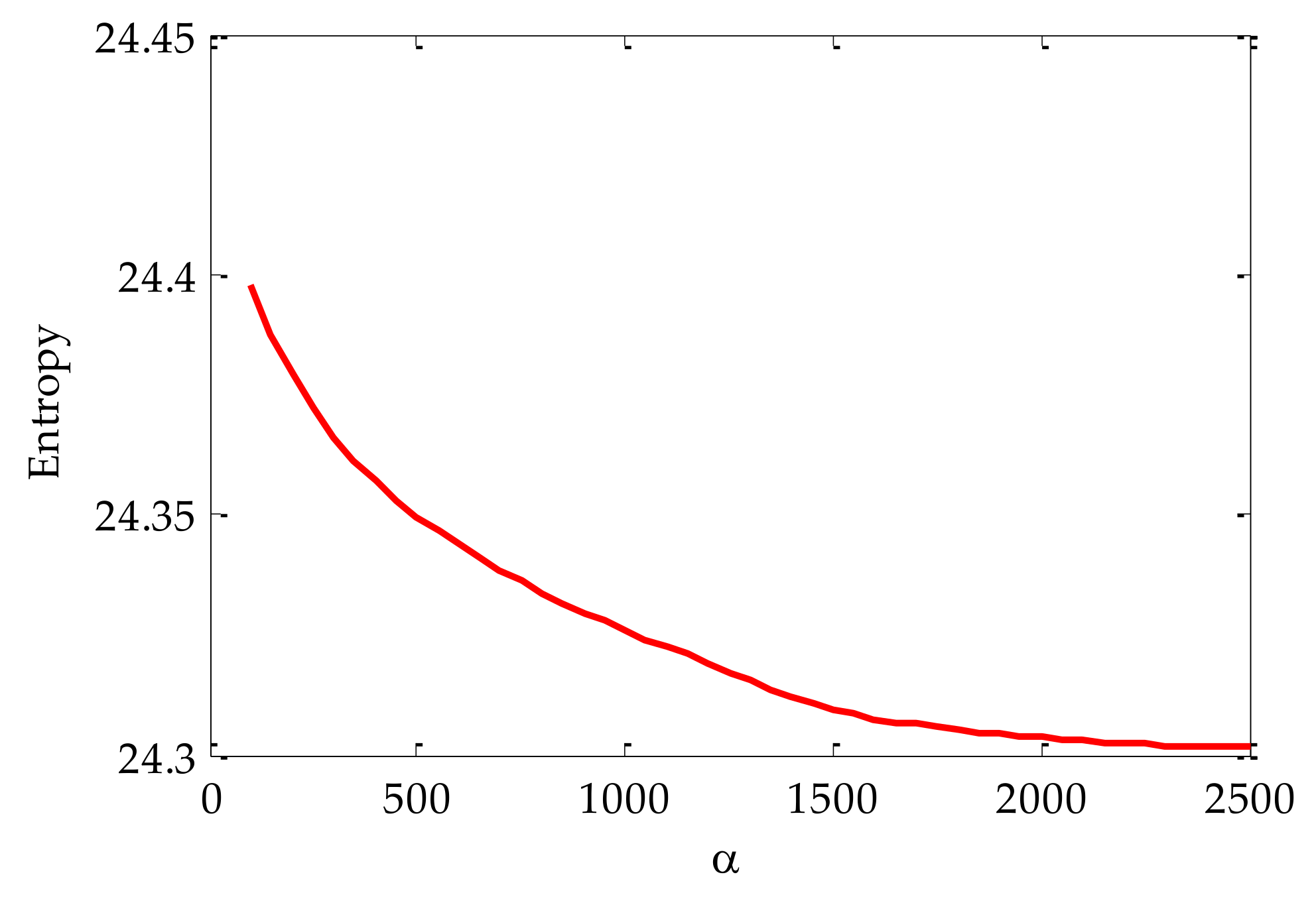
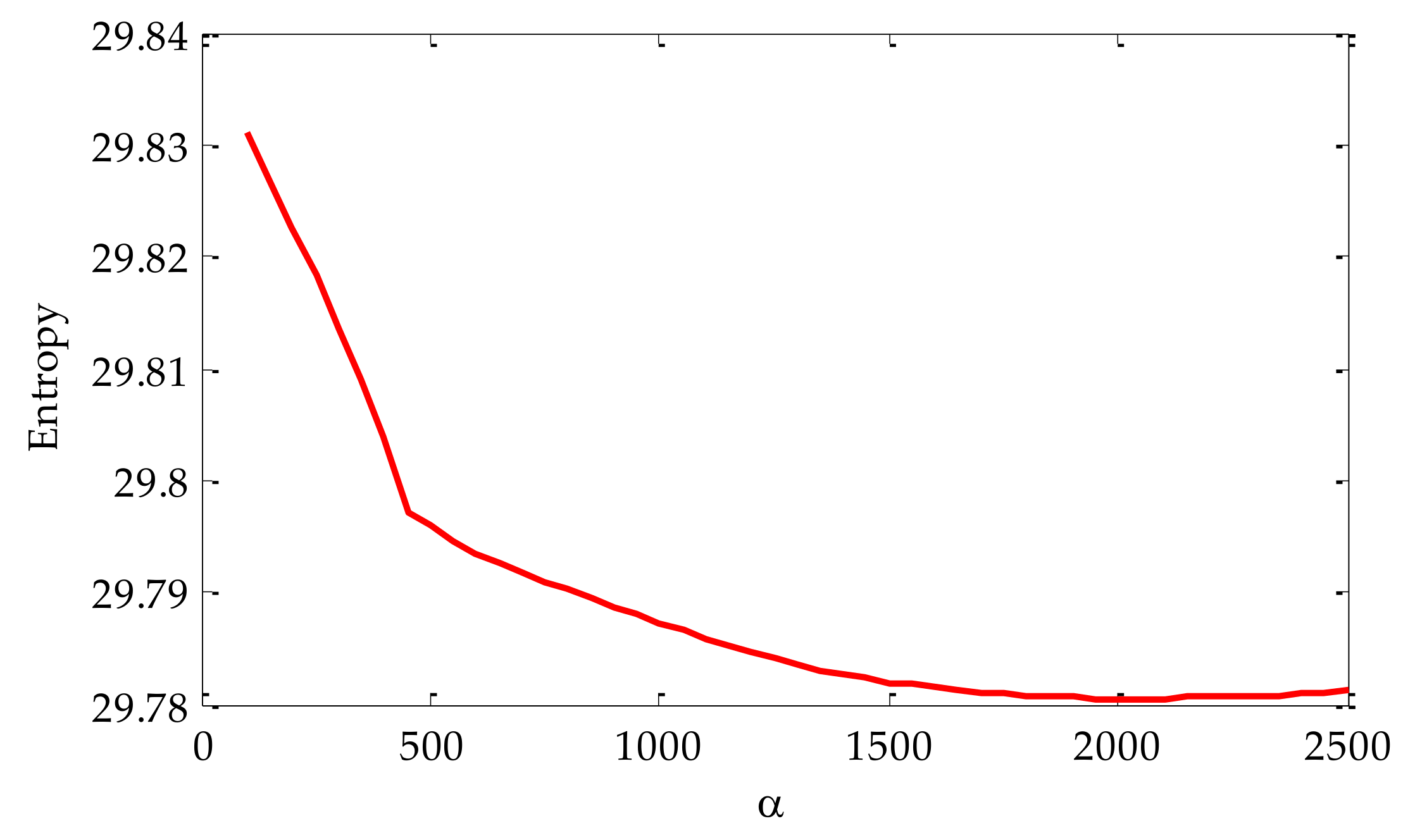
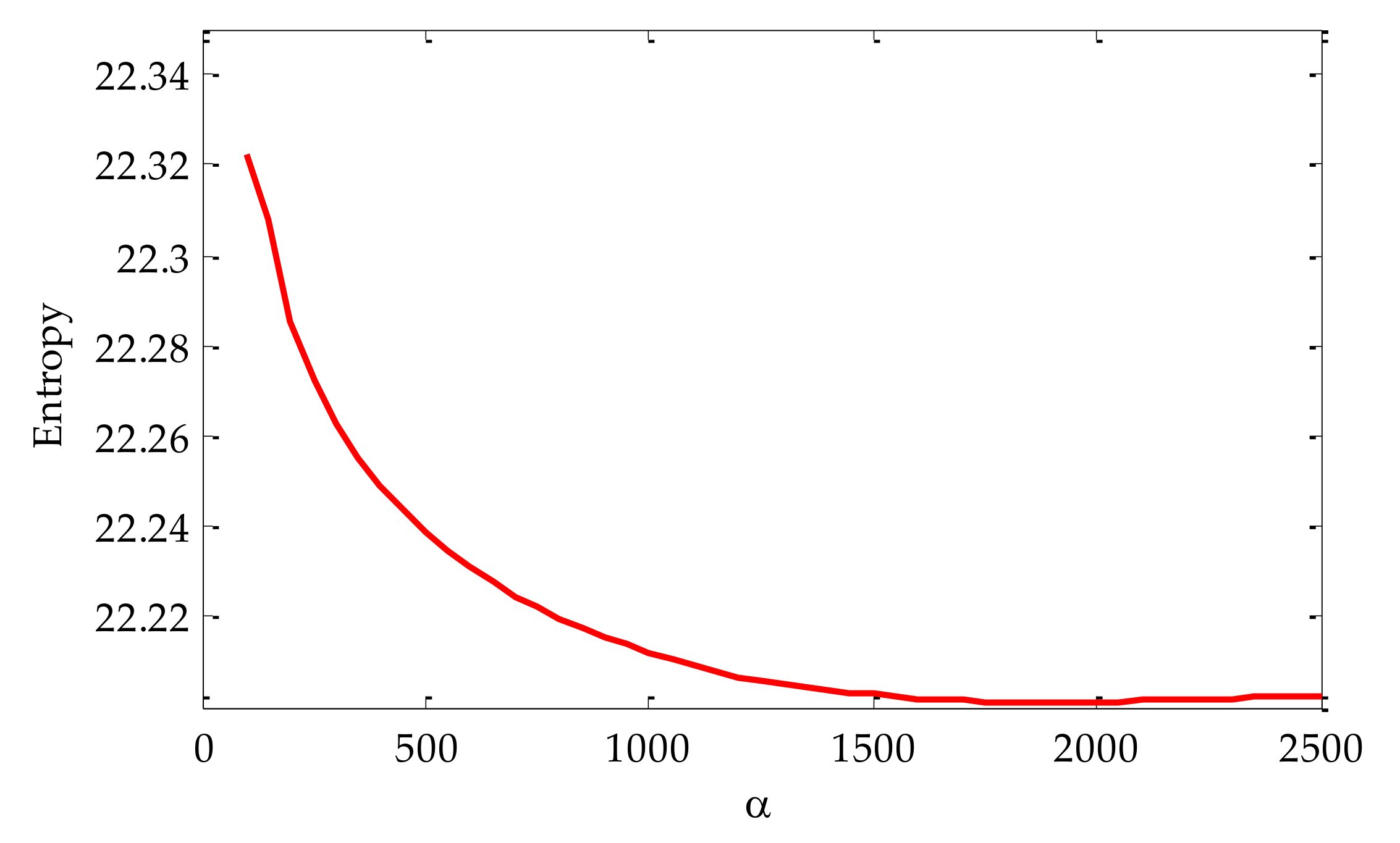
After selecting the value of the optimal mode
K, the value of
α was then initialized. The search range was set to [100, 2500]. Similarly, the value of the optimal mode
α was searched according to the principle of minimum envelope spectral entropy. The relationship with envelope spectral entropy is shown in
Figure 8. From the transformation trend of the value of
α in the figure, it can be seen that with the continuous increase of
α, the value of the corresponding envelope spectral entropy was decreasing and gradually tends to be flat. When the value of
α was 2500, the optimal value can be obtained. Therefore, after parameter optimization, the selected optimal parameter combination
K and
α was [3, 2500].
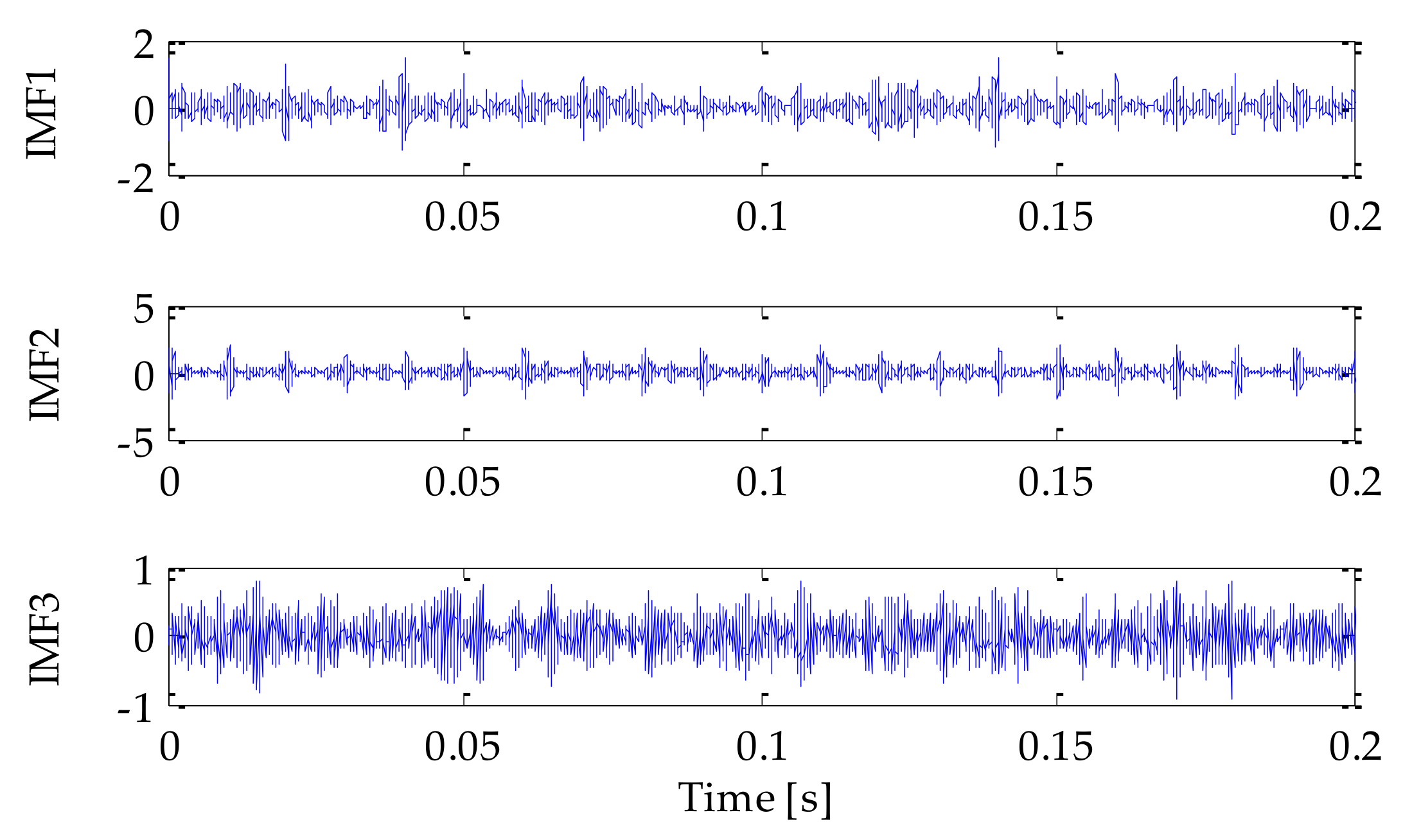
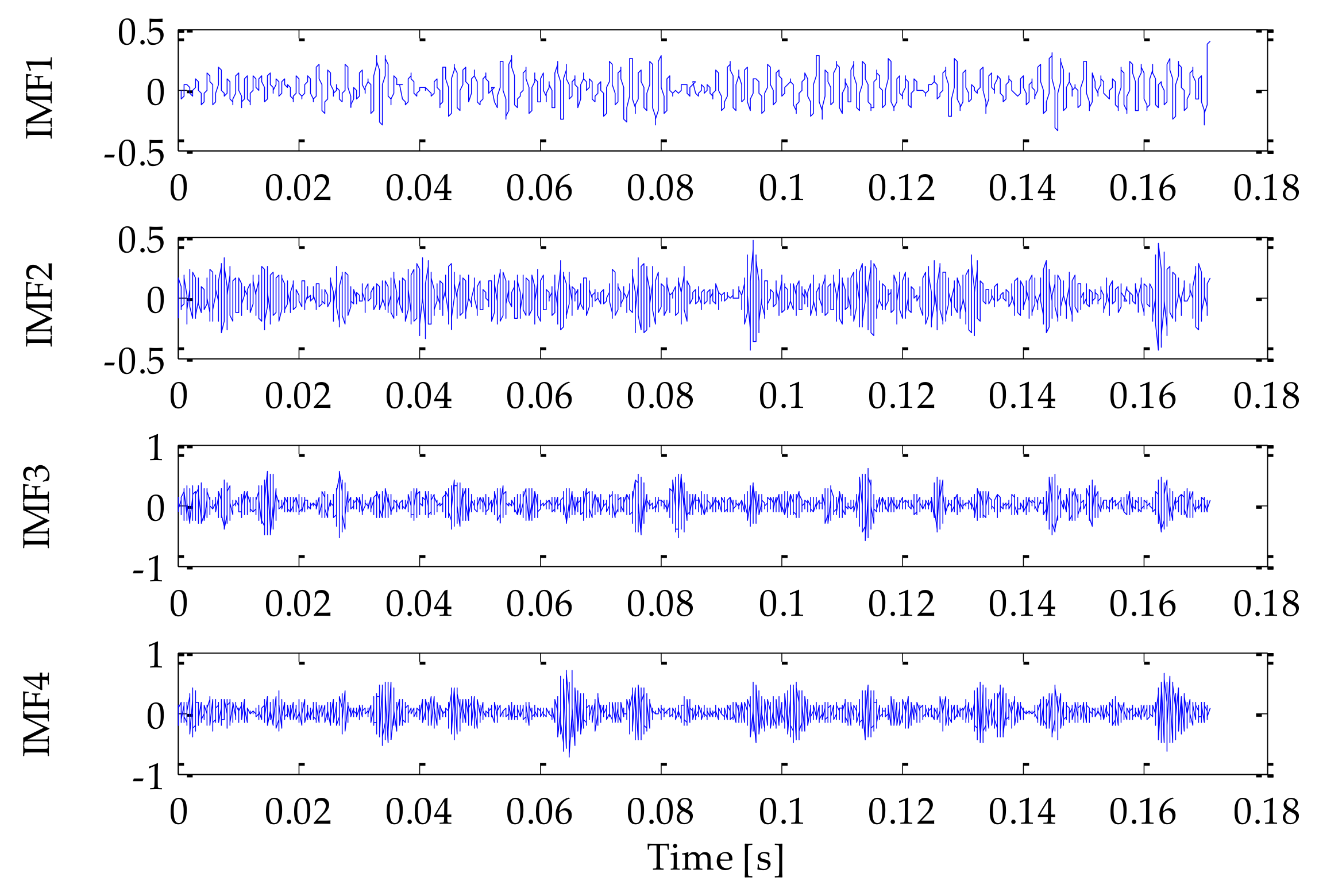
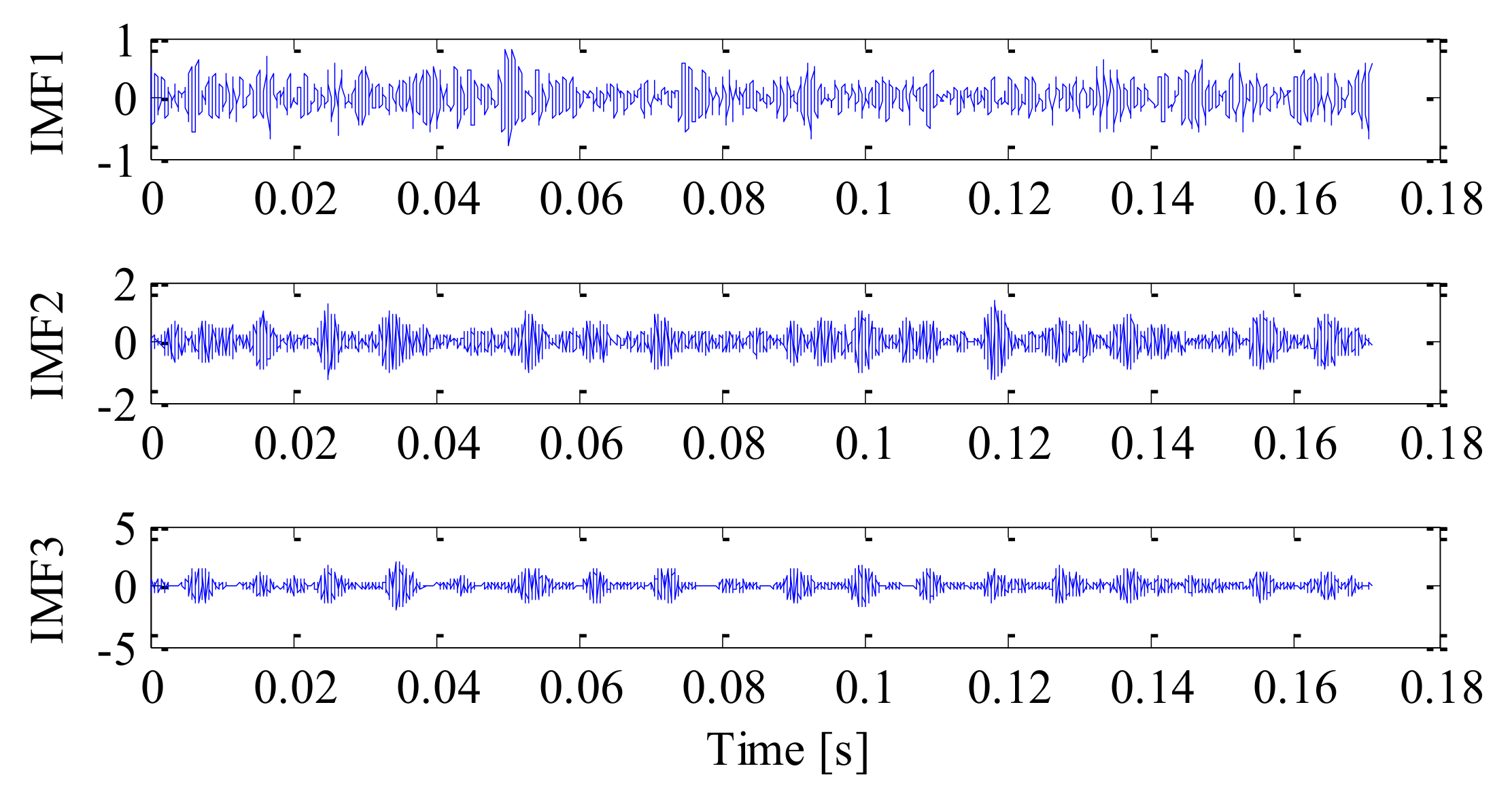
Next, we performed VMD decomposition on the mixed signal. After VMD decomposition optimized by information entropy, three IMF components were obtained. The decomposition results are shown in
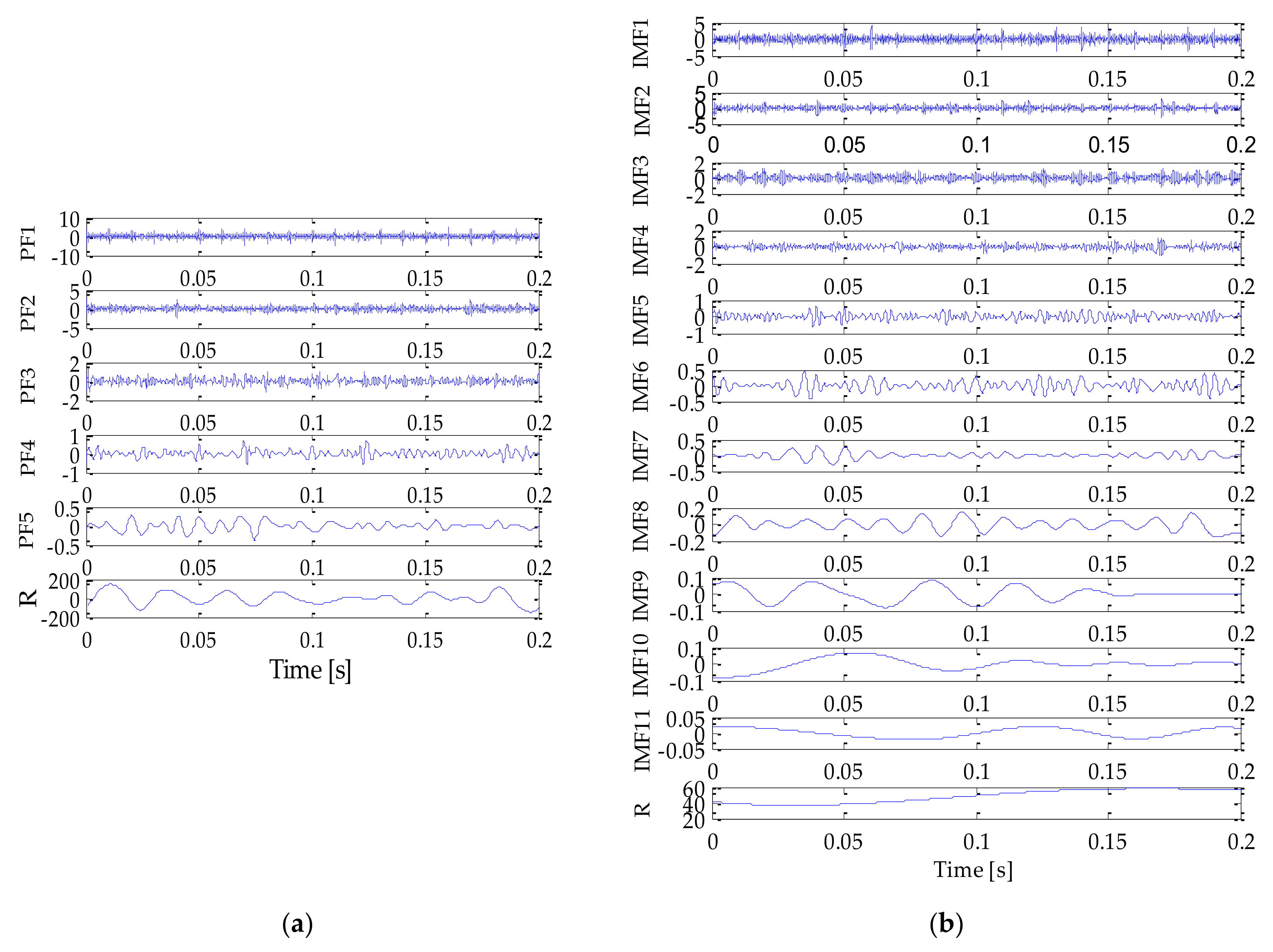
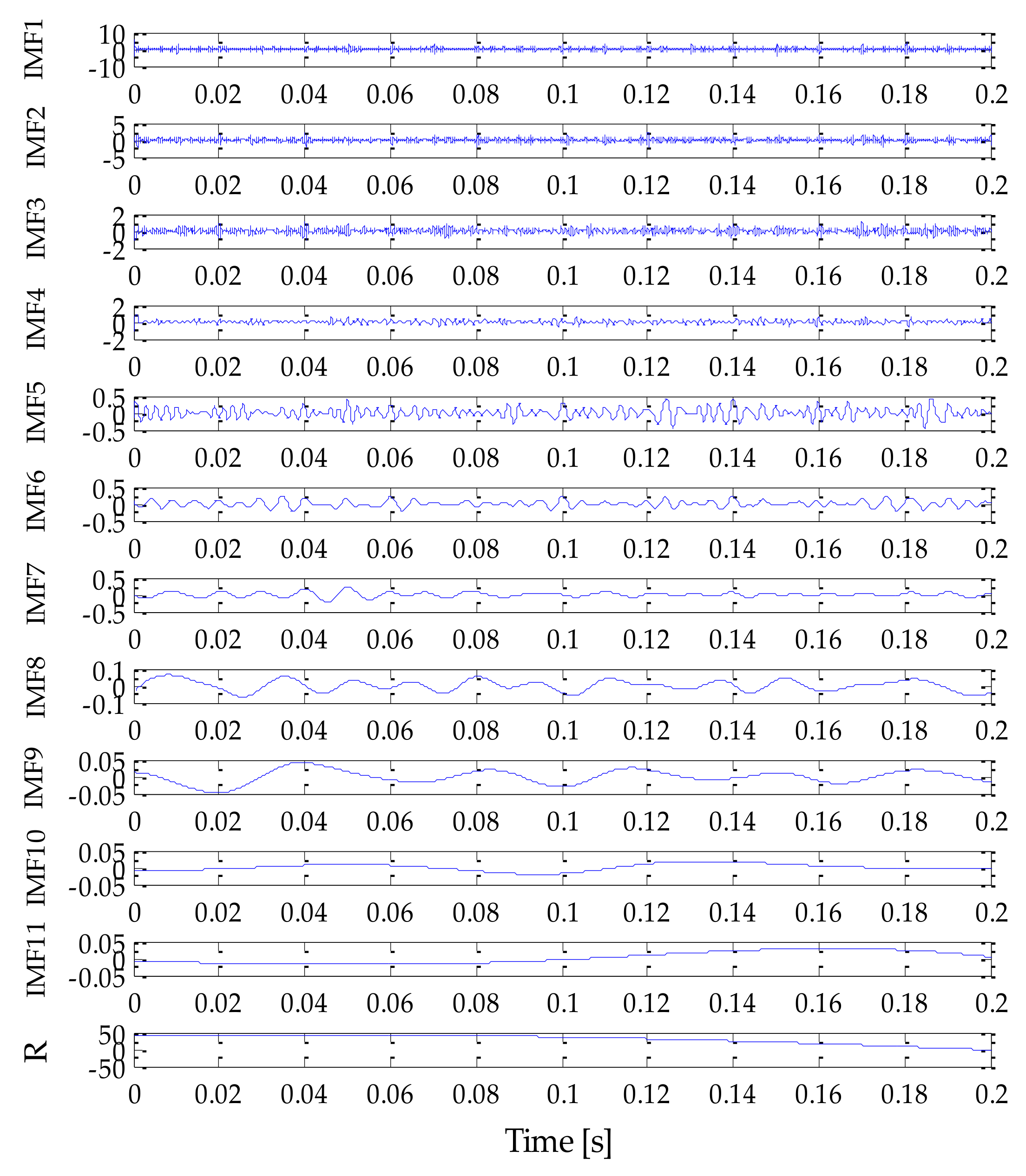
Figure 9. In order to compare the effects of different methods, the traditional LMD decomposition method, EMD decomposition method, and EEMD decomposition method were used for the time–frequency analysis of mixed signals. The signal decomposition results obtained based on the above three methods are shown in
Figure 10a,b.
Figure 10 and
Figure 11 showed that there were more signal components decomposed by LMD, EMD and EEMD methods, and the signal components obtained by EMD and EEMD had certain modal aliasing and endpoint effect. At the same time, faultycomponents were generated.
To select the appropriate signal component from the decomposition results obtained by the above methods, this experiment will combine kurtosis and cross-correlation coefficient to select. Firstly, all signal components’ correlation coefficient
C(
t) and kurtosis value
Q(
t) were calculated. The calculated results are shown in
Table 1,
Table 2,
Table 3 and
Table 4. It can be seen from
Table 1 that the IMF1 component and IMF2 component obtained by VMD decomposition meet the conditions that the correlation value was more significant than 0.3 and the kurtosis value was greater than 3. This shows that the correlation between the above two signal components and the original signal was high, and the signal contained more impact components. Therefore, the IMF1 and IMF2 components were selected to reconstruct the observation signal channel. Secondly, it can be seen from
Table 2 that the PF1 component and PF2 component obtained by LMD decomposition met the conditions that the correlation value is more significantthan 0.3 and the kurtosis value is greater than 3. Therefore, PF1 component and PF2 component were selected to reconstruct the observation signal channel. Meanwhile, it can be seen from
Table 3 that the IMF1 component and IMF2 component obtained by EMD decomposition met the conditions that the correlation value is more significantthan 0.3 and the kurtosis value is greater than 3. Therefore, IMF1 and IMF2 components were selected to reconstruct the observation signal channel. It can be seen from
Table 4 that the IMF1 component, IMF2 component and IMF3 component obtained by EEMD decomposition meet the conditions that the correlation value is more significant than 0.3 and the kurtosis value is greater than 3. Therefore, the above three signal components were selected to reconstruct the observation signal channel, and the remaining signal components were used to reconstruct the noise signal channel. Finally, on this basis, the RobustICA algorithm was used to separate signal and noise. The noise-reduction results obtained by using the method proposed in this paper and LMD–RobustICA, EMD–RobustICA, and EEMD–RobustICA are shown in
Figure 12,
Figure 13,
Figure 14 and
Figure 15.
By analyzing the noise-reduction results in
Figure 12,
Figure 13,
Figure 14 and
Figure 15, it can be seen that after the noise-reduction method proposed in this article, the impact components in the signal have been revealed. In contrast, the results obtained by the LMD–RobustICA, EMD–RobustICA, and EEMD–RobustICA were not significant. To further analyze the effect of noise reduction, the experiment selected four indicators of kurtosis value, cross-correlation coefficient, root mean square error (RMSE), and mean absolute error (MAE) as evaluation indicators. After calculation, the results obtained are shown in
Table 5. In
Table 5, by using the method proposed in this paper, the correlation value and kurtosis value obtained after noise reduction were the largest, while the RMSE and the MAE were the smallest. However, the four groups of evaluation index values obtained after noise reduction using LMD–RobustICA, EMD–RobustICA, and EEMD–RobustICA were relatively poor. Therefore, after quantitative analysis, it can be known that the signal obtained after noise reduction using the method proposed in this paper contained a higher impact component, a greater degree of correlation with the original signal, and a relatively higher waveform similarity.
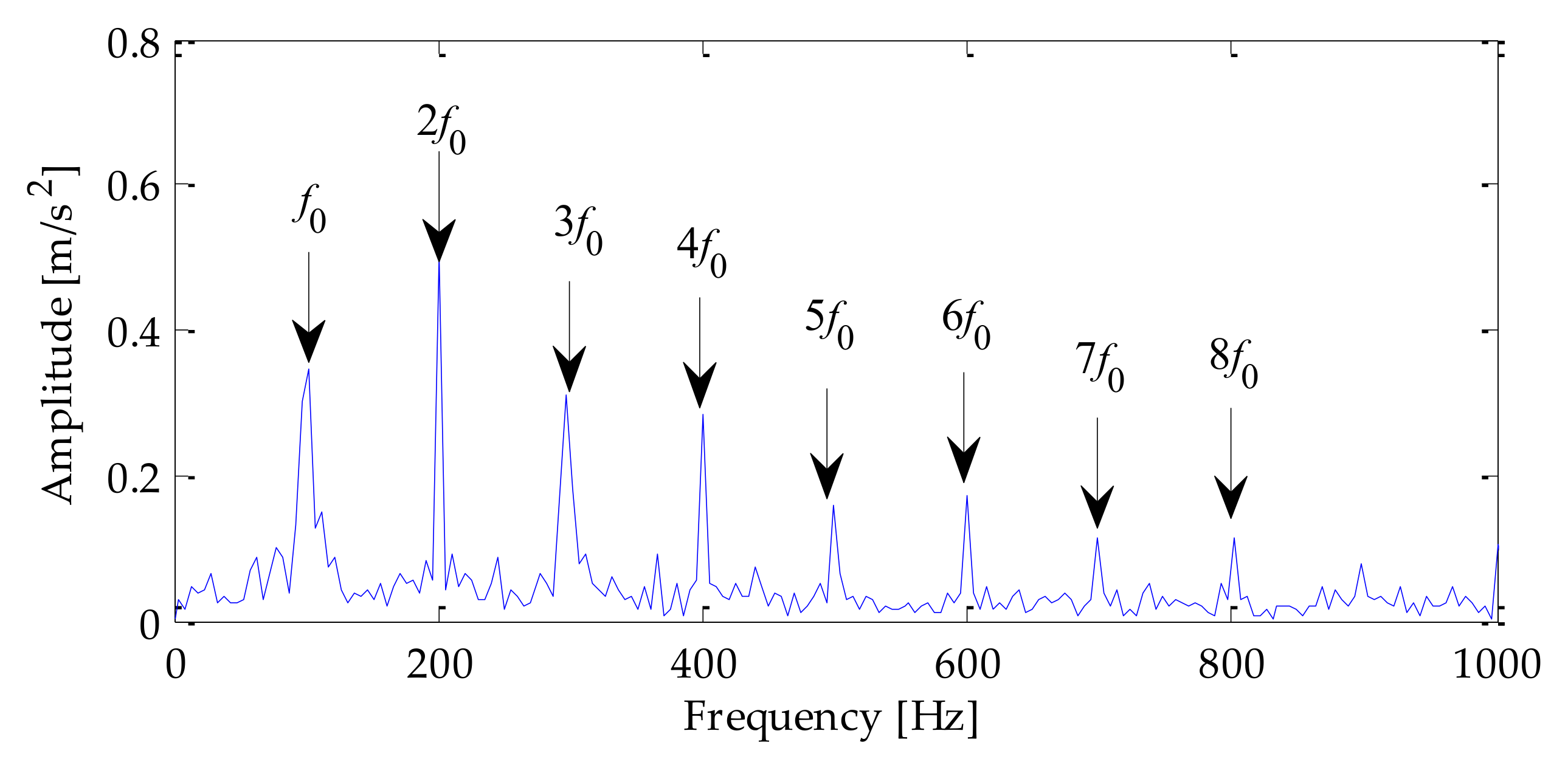
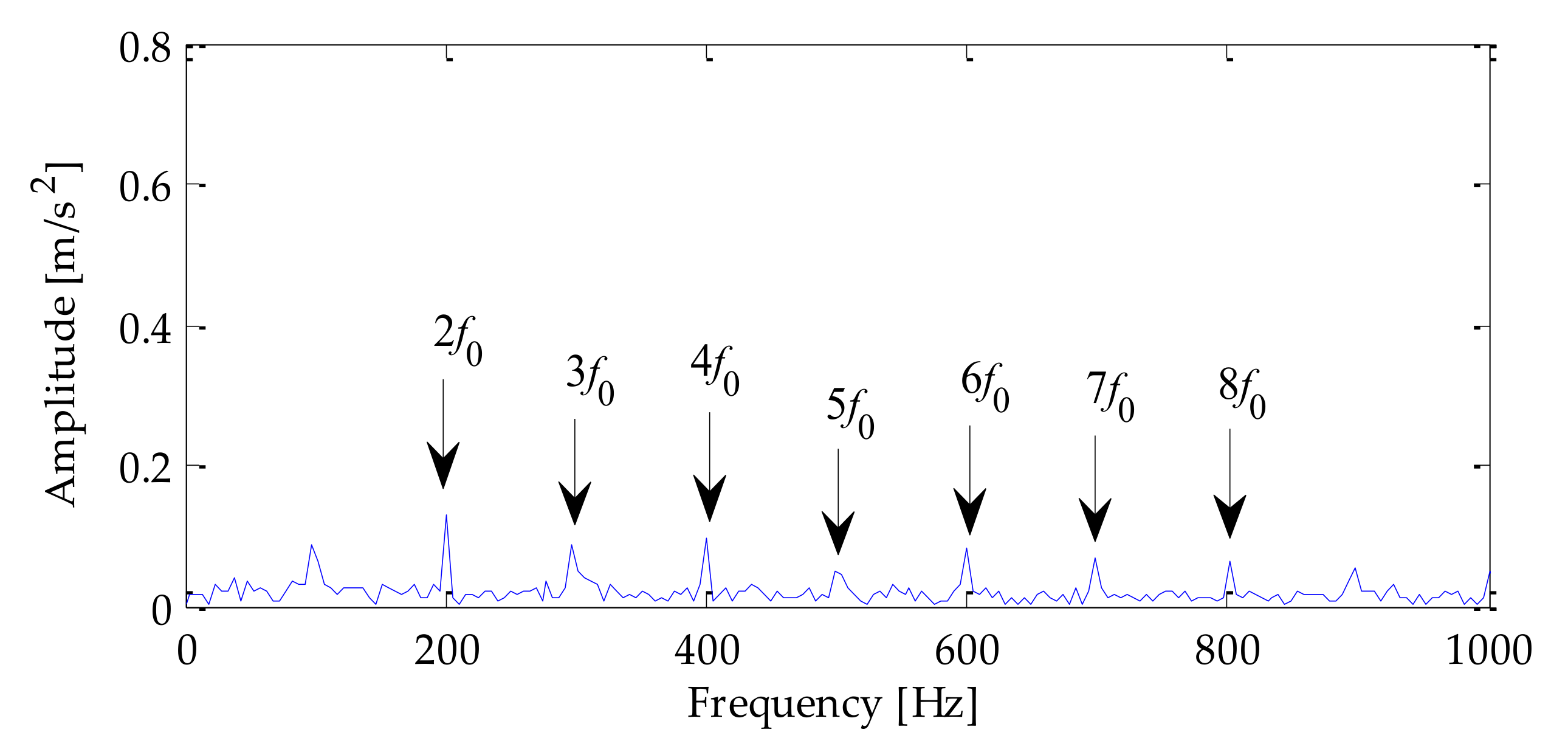
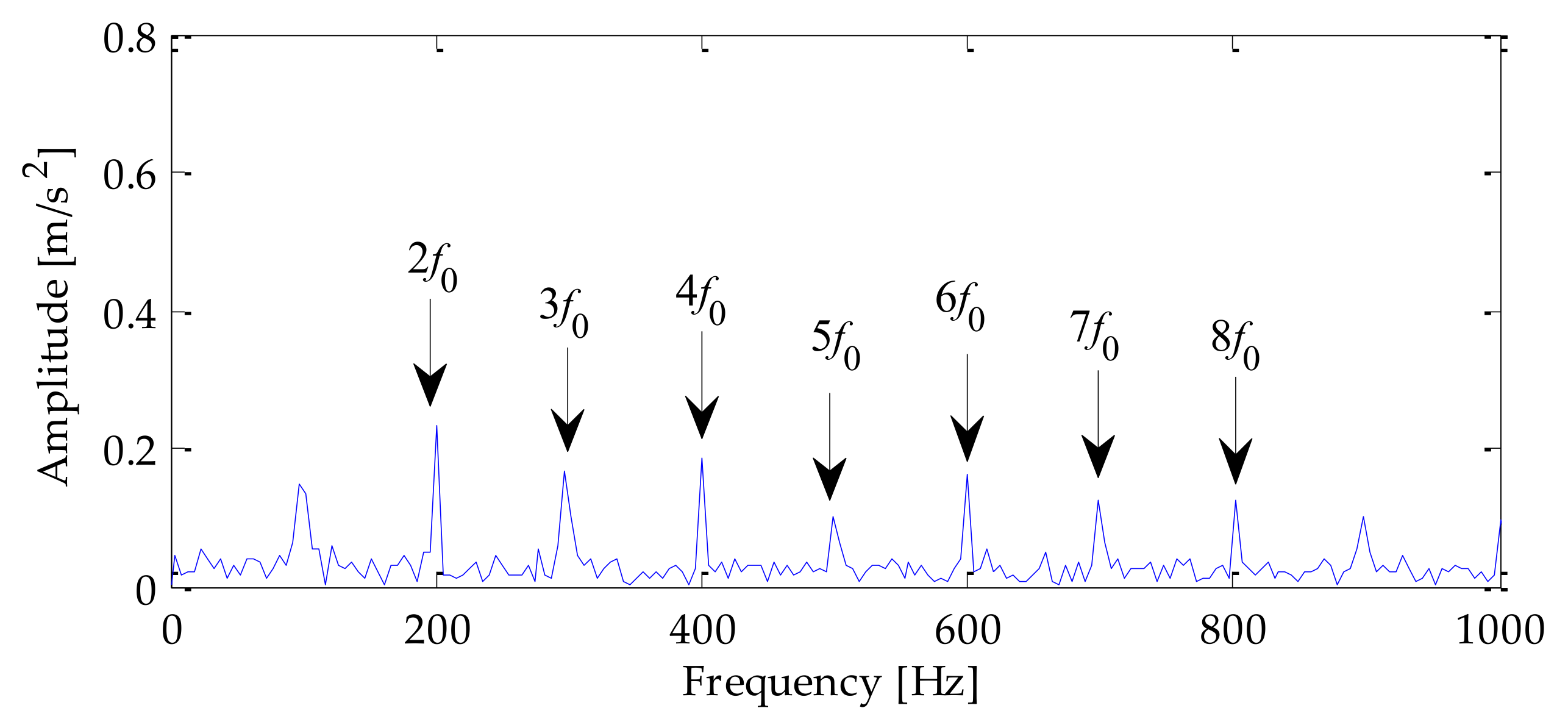
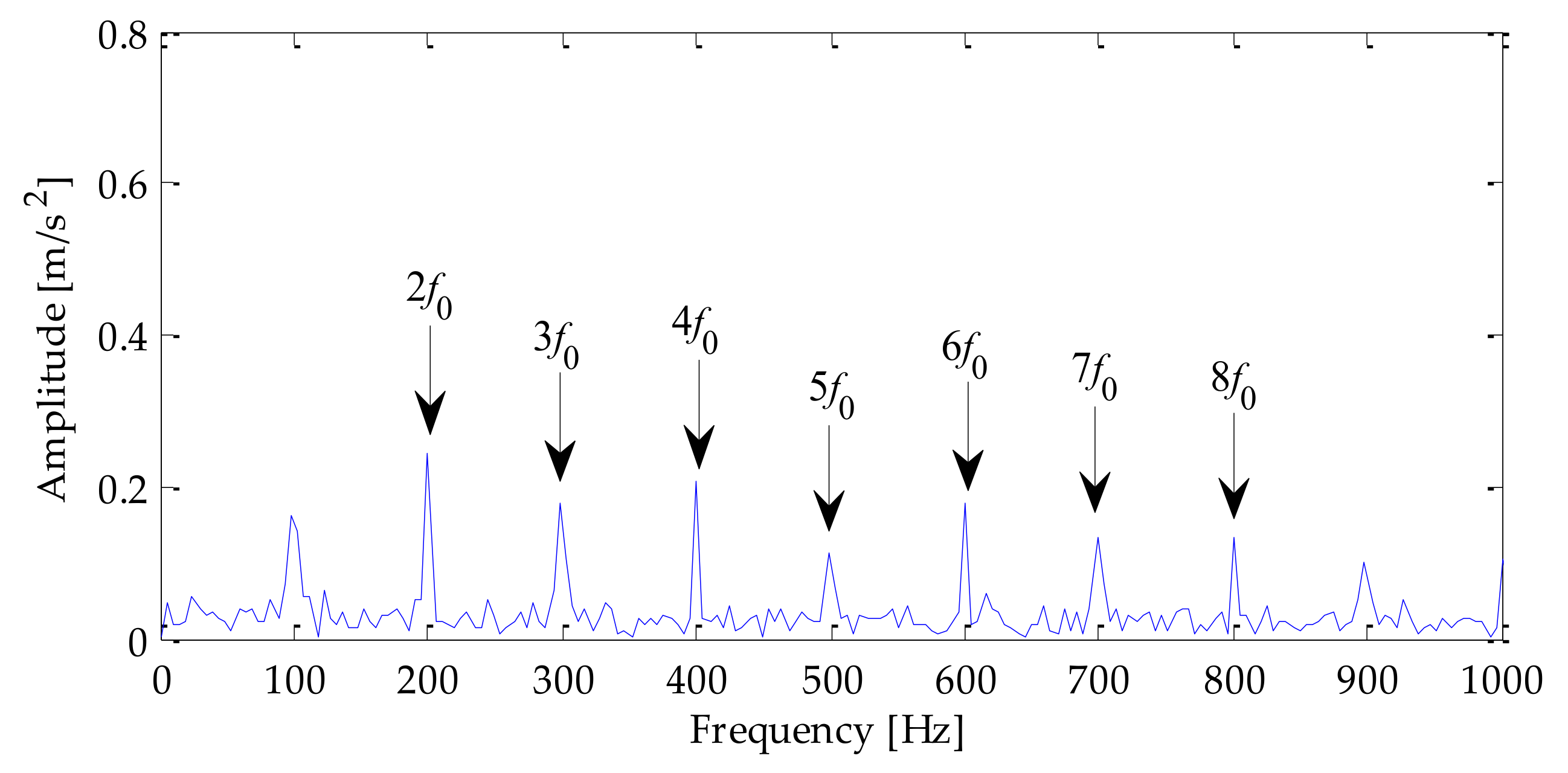
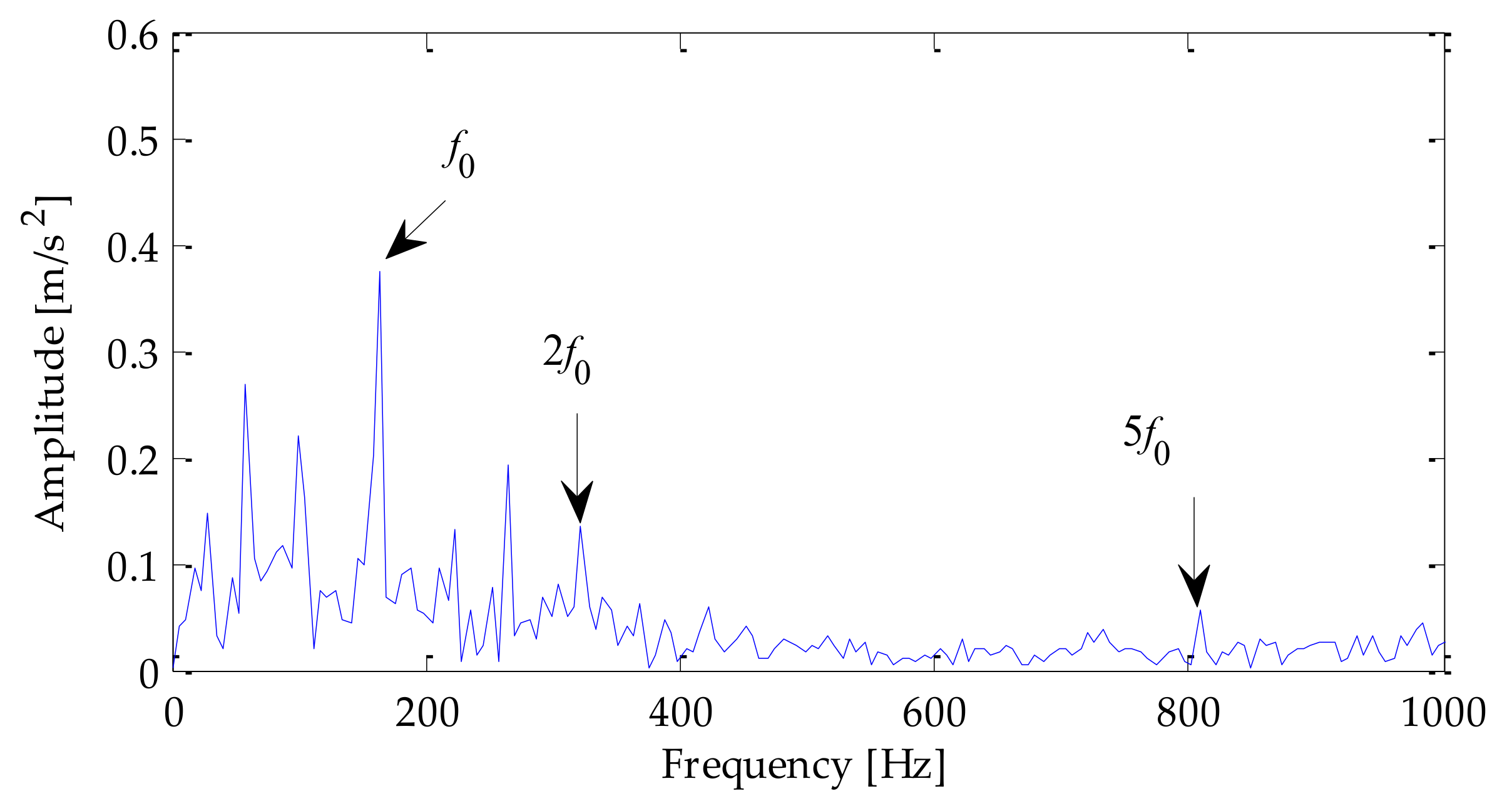
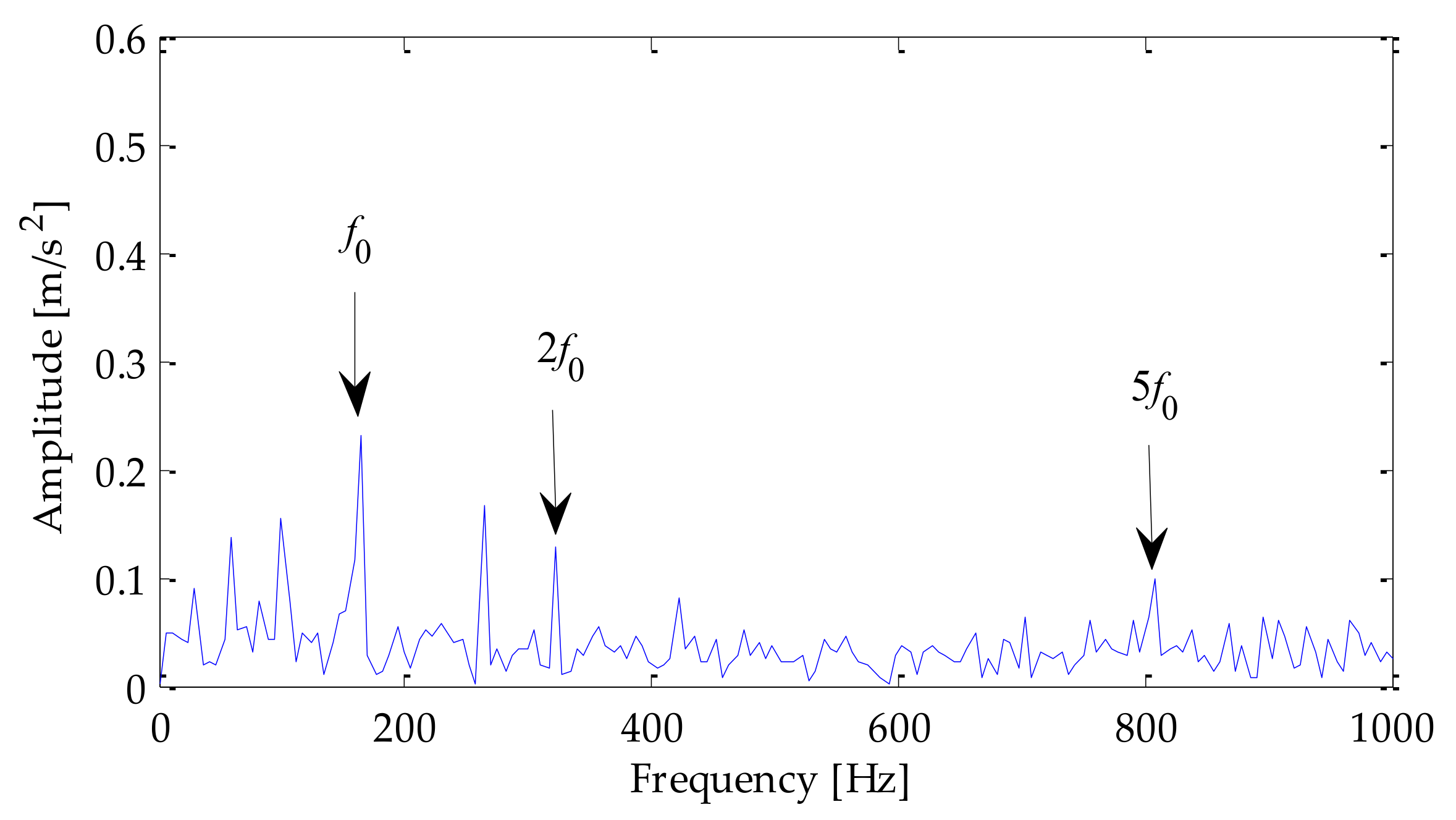
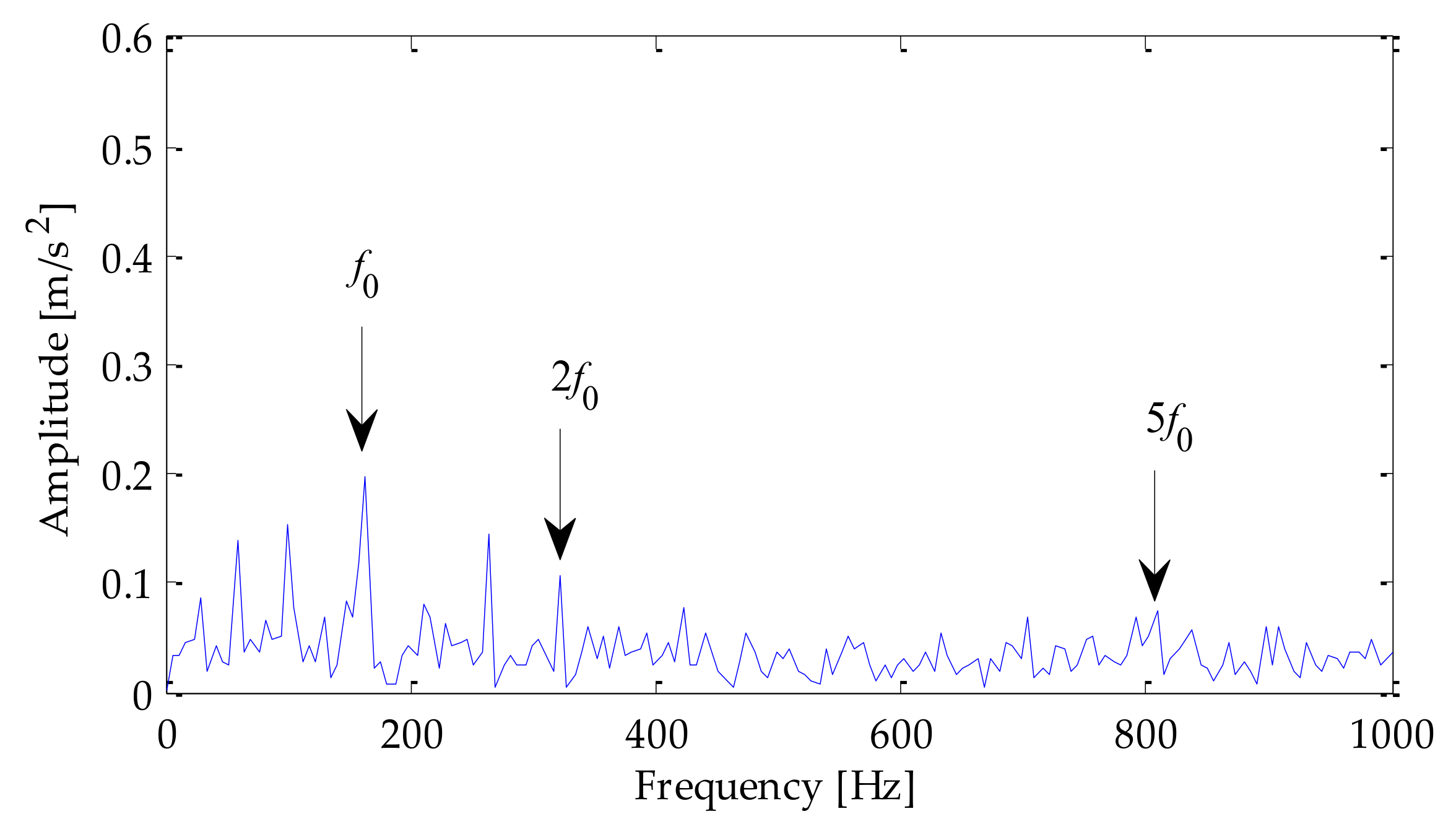
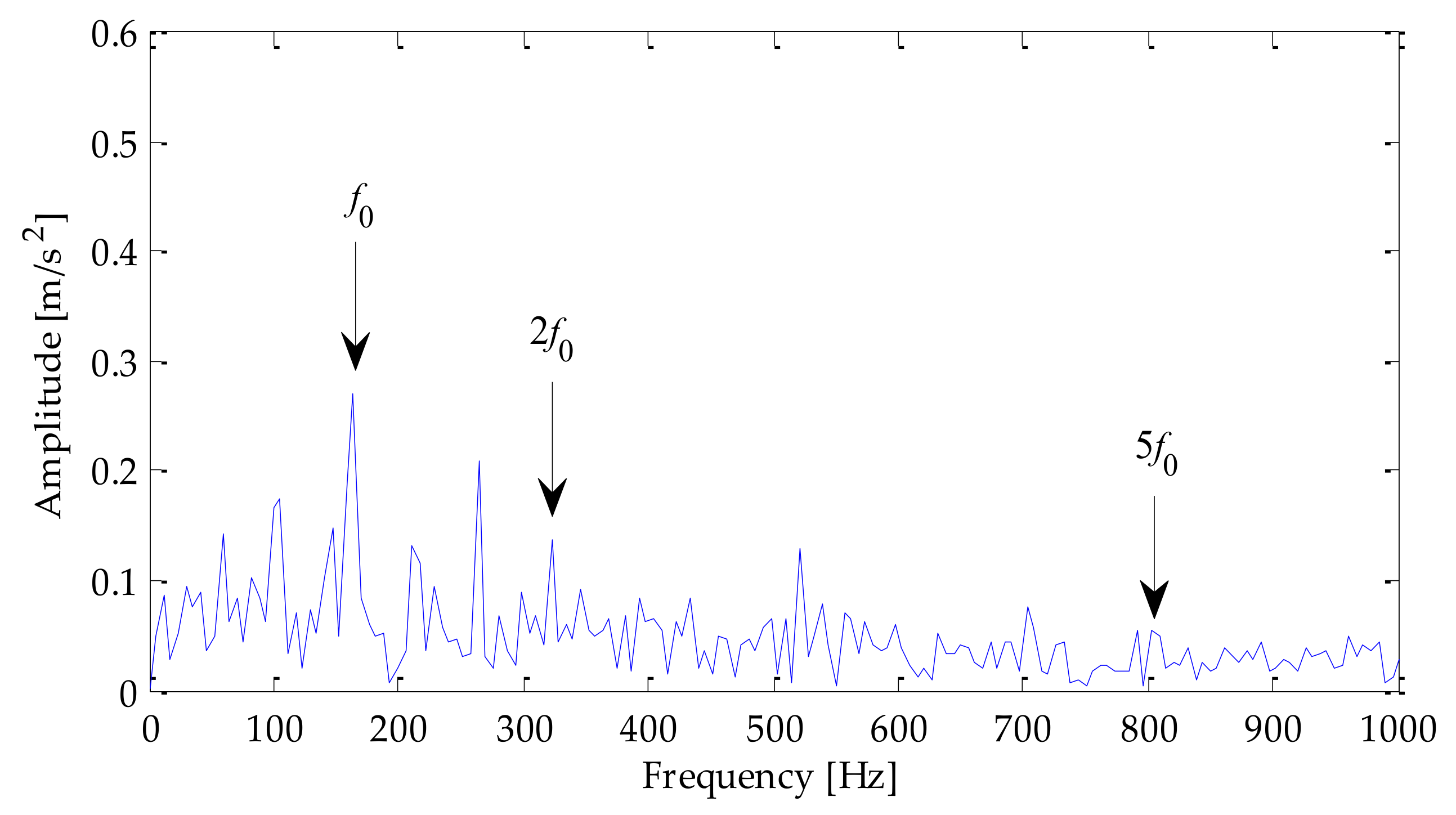
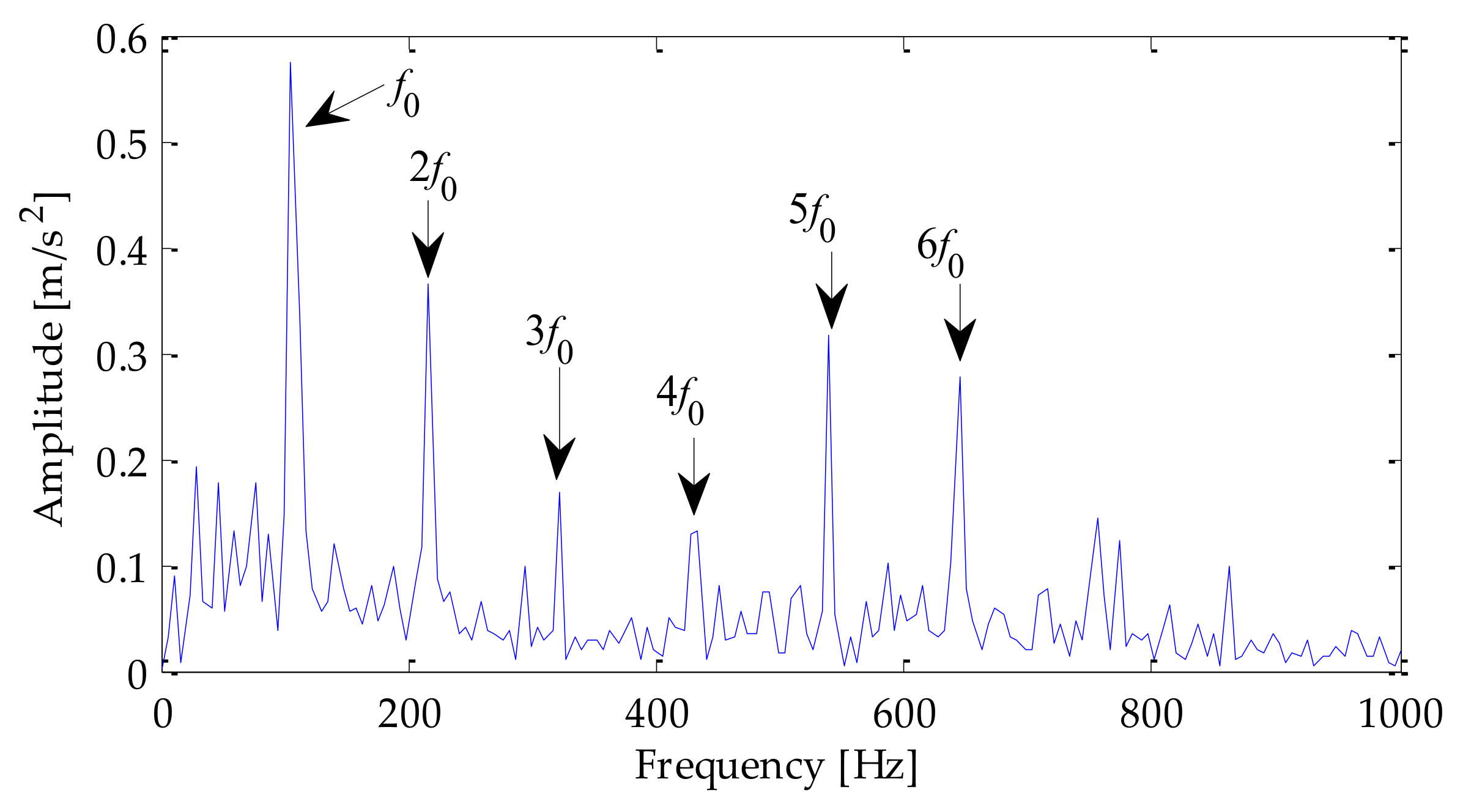
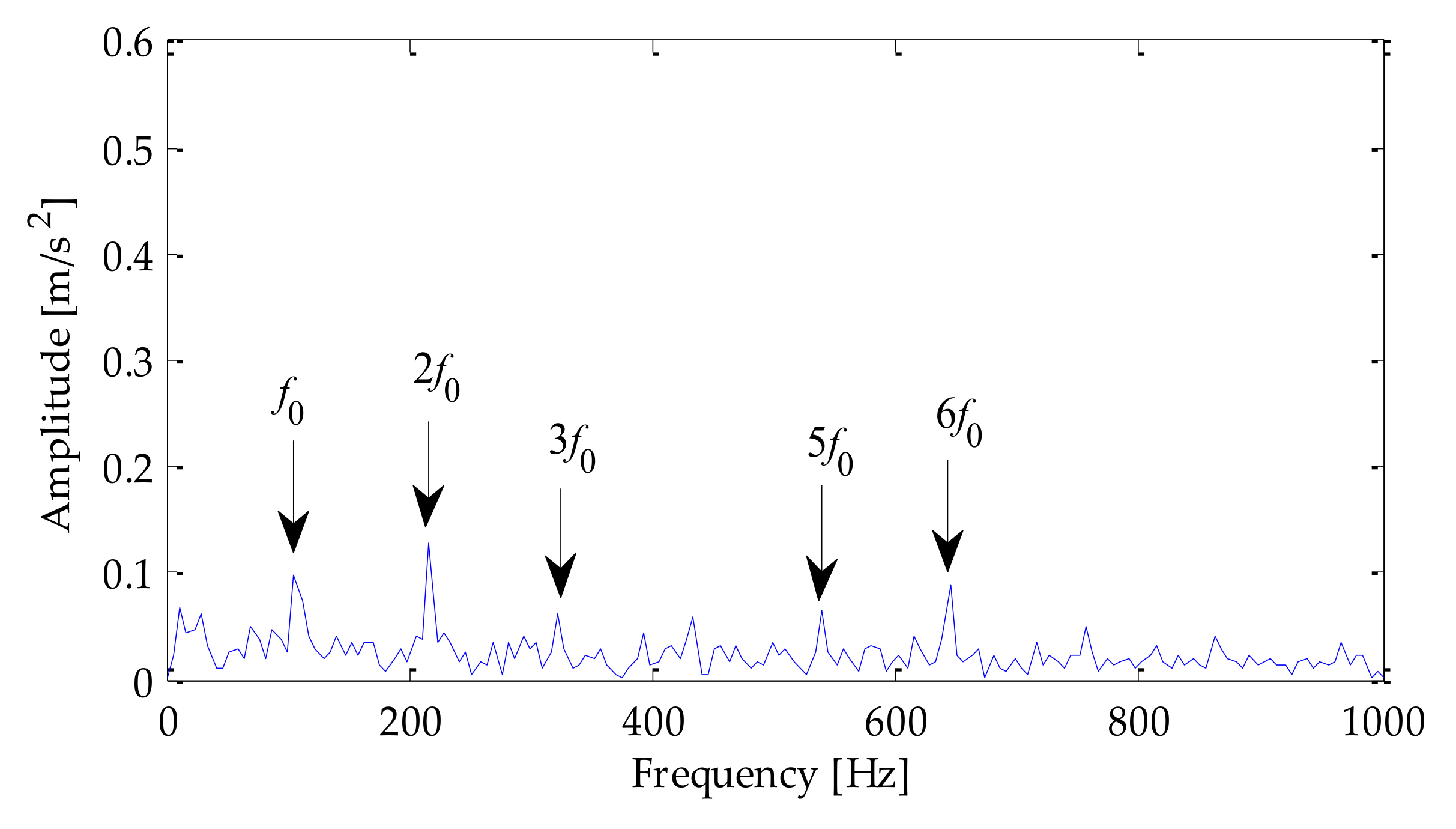
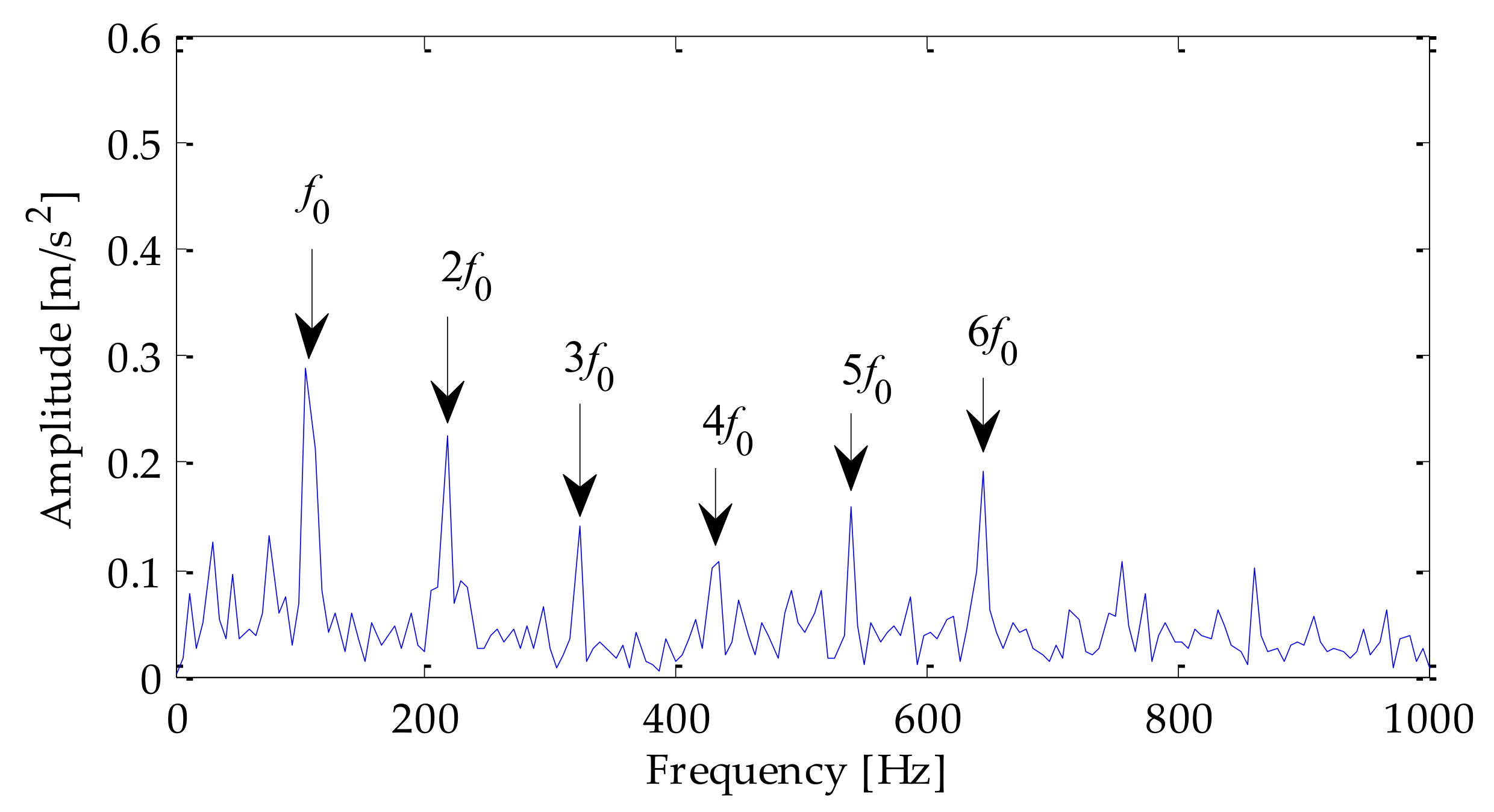
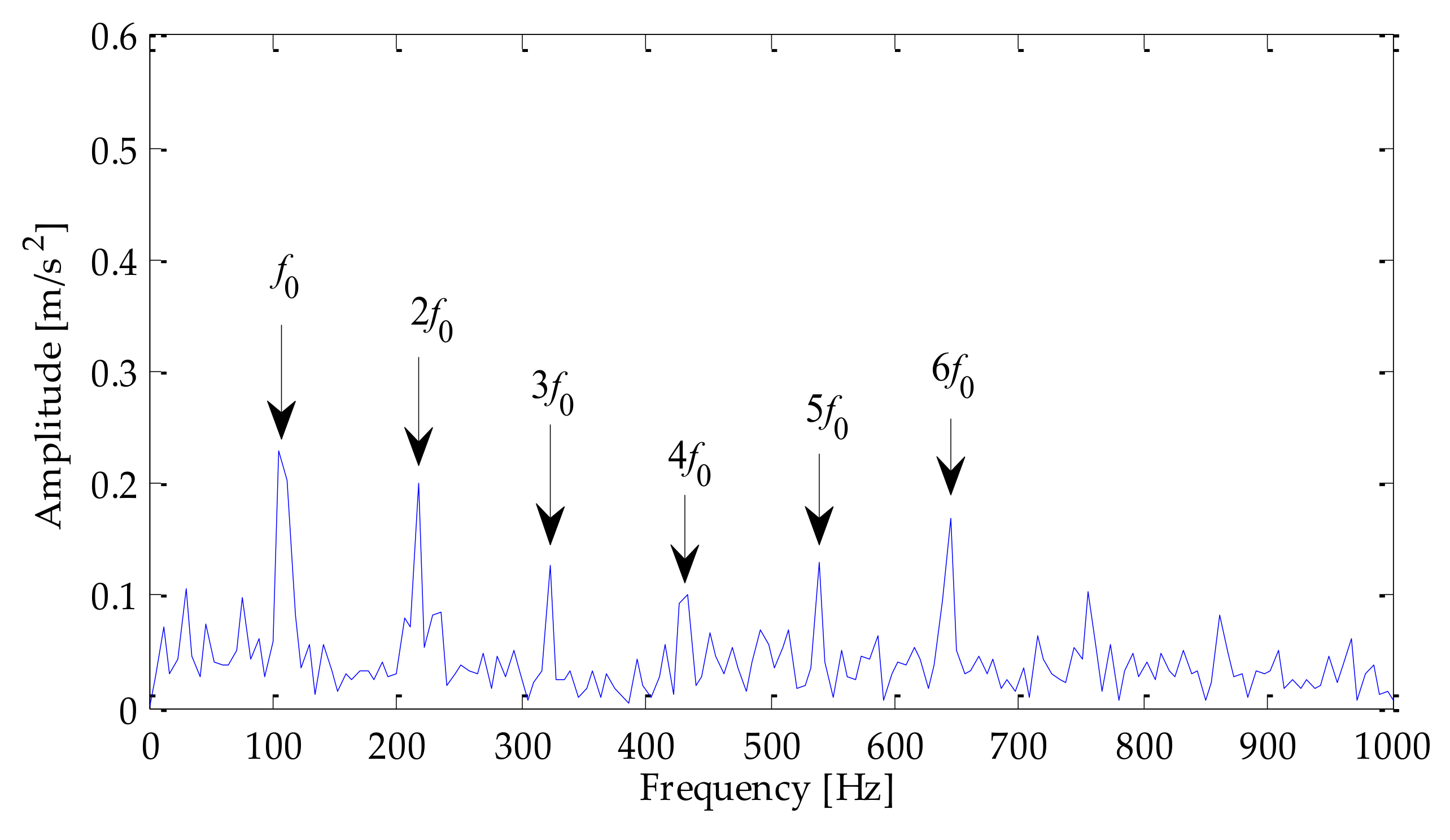
Next, Hilbert envelope demodulation was performed on the results obtained based on the above three methods, and then the corresponding fault features were extracted. The envelope spectrum is shown in
Figure 16,
Figure 17,
Figure 18 and
Figure 19. It can be seen from
Figure 16 that the envelope spectrum obtained by the method proposed in this paper can clearly show multiple peaks with higher amplitudes, and the above peaks correspond to the frequency of one to eight times of the fault frequency, and so on. It shows that the useful signal and noise have been separated well, and the fault feature can be successfully extracted. At the same time, it can be seen from
Figure 17,
Figure 18 and
Figure 19 that the envelope spectrum obtained by the LMD–RobustICA, EMD–RobustICA, and EEMD–RobustICA can extracted components such as two to eight times of the fault frequency. However, it is difficult to clearly distinguish the fundamental frequency of fault frequency from each peak. In addition, compared with
Figure 16, the amplitude of the fault frequency in
Figure 17,
Figure 18 and
Figure 19 was relatively low. It can be seen that the effect of using the method proposed in this paper to extract fault features was more significant.
6. Conclusions
In this paper, a fault feature extraction of the rolling bearing signal under strong noise background is studied by using the combination of VMD optimized with information entropy and RobustICA. The conclusions were as follows.
(1) Although VMD can analyze the signal in the frequency domain, the effect is limited by the impact of modal component k and penalty factor α. This study used information entropy to optimize VMD to set initialization parameters. Compared with the way of setting parameters by experience, this method can search for a better combination of VMD parameters. This method can overcome the problems of modal aliasing and endpoint effect caused by impact component and noise interference in traditional EMD, LMD and EEMD, and has a good processing effect on the extraction of fault characteristic frequency of non-stationary and nonlinear signals. It can extract fault features more accurately. Compared with the traditional method, the experimental results show that this method can highlight the fault characteristic frequency and distinguish the fault.
(2) In this experiment, a typical simulation signal model is selected and Gaussian white noise is added on this basis to simulate the periodic impact signal caused by bearing fault under the condition of noise interference. Then, a signal component screening criterion based on correlation coefficient and kurtosis is established, and the optimal signal component is used to construct the observation signal channel of RobustICAalgorithm, so as to achieve the purpose of noise reduction.Through the in-depth analysis of the constructed simulation signal and the collected signal of the actual rolling bearing, it can be seen that compared with the traditional methods based on LMD–RobustICA, EMD–RobustICA, and EEMD–RobustICA, the method proposed in this paper can obtain better evaluation results of noise-reduction index, and the time–domain waveform of the signal after noise reduction is very similar to the waveform of the original signal.
(3) By comparing and analyzing the envelope demodulation results obtained by different methods, it can be seen that after the envelope spectrum analysis using the method proposed in this paper, the amplitude of fault characteristic frequency has been enhanced, and the surrounding interference will not affect the identification of fault fundamental frequency and frequency doubling, which is more convenient for fault diagnosis and analysis.
As an effective adaptive signal processing method, VMD has achieved good results in the field of fault diagnosis. However, the relevant parameters of this method need to be set in advance. In the process of parameter optimization, there is no theoretical basis for the definition of parameter search range. Therefore, in the next work, we will conduct in-depth research and further improve the parameter optimization method of VMD method.
















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}