1. Introduction
Each particle has its own physical and chemical properties. The uniqueness of these parameters can be used for the separation and manipulation process in mixing different types of particles using the dielectrophoresis (DEP) technique. In natural occurrences, this can be observed in the inseparable boundary between fresh and saltwater particles between the Mediterranean and the Atlantic Ocean in the Gibraltar. These particles can still be differentiated since each particle has its own distinctiveness. Thus, this review describes and discusses the versatile mechanism only by introducing an alternative method of both capabilities, namely lateral attraction at the y-axis and vertical repulsion at the z-axis. Manipulation of particle polarisation is based on the unique properties of the particles for identification. This allows versatile mechanism manipulation and separation processes to be performed for mixing various types of particles in a liquid medium.
Today, the process of manipulating and separating particles is divided into two main techniques, which are contact and contactless techniques. For instance, particle manipulation and separation processes using the contact technique include pressure-driven membrane filtration using a micro/nano membrane [
1], a microgripper [
2], label/marker techniques such as epithelial cell adhesion molecule (EpCAM), fluorescence-activated cell sorting (FACS) and the mixing of magnetic materials including magnetic activated cell sorting (MACS) [
3]. In general, direct contact techniques have a negative impact on particles and their medium environment. More important are the physical and chemical damages experienced by the particles and the medium contamination due to direct contact and the addition of contamination materials, including marker and magnetization, which can influence the effectiveness of manipulation and separation. Consequently, the main issue affecting pressure-driven membrane filtration is the physical contact of the target particle surface and vice versa, which is similar to the addition of a marker and magnetisation techniques. Therefore, the solution to the problem of manipulation and separation of the proposed label-free, contactless technique particles is the use of DEP technology [
4,
5,
6,
7,
8,
9,
10,
11,
12,
13].
The development of DEP’s field of research focusing on the use of particle manipulation and separation processes has been strongly emphasised by world-renowned scientists through the techniques of contactless solution [
14,
15,
16,
17,
18]. The use of DEP technology enables the process of particle manipulation and separation to be performed using dielectrophoresis forces (F
DEP) based on the dielectric value between the particles and medium environment. This is because particle movement, positioning and stationing for manipulation and separation purposes are crucial if additional marking materials are not present. There are many advantages that can be gained from the use of DEP fields. For instance, the target and non-target particles and environment in the medium are not affected either physically or chemically during the DEP procedure. In addition, they can reduce and eliminate the negative impacts on the particles and medium contamination. Operational complexity levels can be simplified, which will reduce operating costs. Moreover, the efficient manipulation and separation processes at high rates can be gained from DEP techniques.
Advanced application technology for medical use depends on the efficiency of the manipulation and separation processes for mixed groups of cells and biomolecules. At present, DEP’s ability to manipulate and separate cells and biomolecules based on FDEP, which is a contactless process method, has been introduced and progressively performed in medical studies. This is because the electrokinetic DEP application has the potential to be used as a MEMS sensor and actuator for detection and manipulation. Specifically, this involves the process of detection, enumeration, focusing and separation of target cells and biomolecules. The ability of DEP to choose one type of cell and biomolecule can benefit the development of an artificial kidney. The separation process between good cells and unwanted toxins can be performed during the blood cleaning process known as haemodialysis.
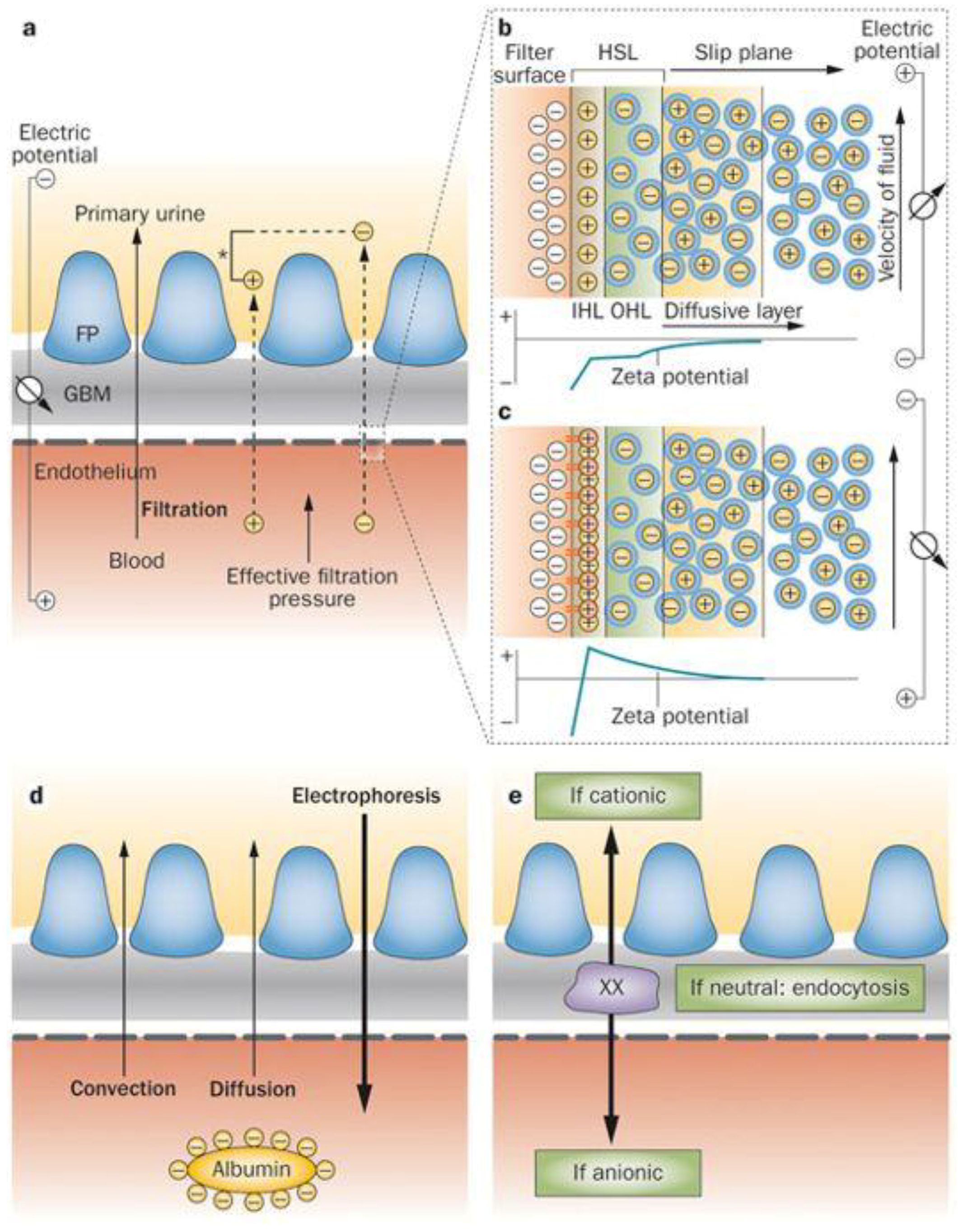
Potential DEP implementation is still under investigation for human organs-on-chip (CoC) application, for example, in imitating the human kidneys. The task of the kidney is to sustain a healthy body and well-being. The kidneys’ main function is in the urinary organ where filtration, reabsorption and secretion occur. In this regard, we use DEP as a glomerular filtration mechanism, which is a critical process of the human kidney which ensures that only waste and excess water are removed from the body. These processes can be explained by blood cleaning through glomerular-based membrane filtration with two different mechanisms as shown in
Figure 1. First, the pore model filtration based on the diffuse and convention process is shown in
Figure 1a,d. This technique is similar to a human-made haemodialysis dialyser based on the passive filtration method. Second is the electrokinetic model filtration based on selective detection and rapid manipulation as shown in
Figure 1b,c,e. The implementation of DEP in selective detection is based on the target particles of their dielectric properties. The dielectric properties are derived from physical and chemical properties by target particles. Consequently, different transitions of DEP working frequencies are subjected to their own dielectric properties. The rapid manipulation is based on differences in the dielectric properties of target and non-target particles. Therefore, different DEP working frequencies are applied to target particles and non-target particles under DEP occurrence. This results in the manipulation of target particles and non-target particles at the inner and outer regions of interest, respectively. Thus, this requirement provides a versatile filtration with potential for a glomerular-based membrane in an artificial kidney development solution.
The contactless process of manipulating and separating particles through the DEP method is based on the dielectric value of the particles and medium environment [
20,
21,
22,
23,
24,
25] subject to the input frequency applied, which generates two pole microelectrodes. The early stage of development in the DEP theory involves wire electrodes. However, to date, most researchers use microfabrication methods for patterning microelectrodes. The integration of CMOS and hybrid micro- to nanofabrication technology proves the versatile DEP capability for lateral or vertical manipulation and separation.
Tapered DEP microelectrodes facilitate efficient manipulation and separation processes. In previous works involving DEP, the force drive generated using a straight-cut profile of DEP microelectrodes, which results in lateral or vertical DEP driving forces only, clarifies only the lateral or vertical for the manipulation and separation of alignments at different magnitudes at the similar axis. A problem occurs in the mixing of two or more mixtures containing different particle sizes and types, in particular, particles collected at a similar axis but have different magnitude of strengths. One of the latest works of tapered DEP microelectrodes for the efficient manipulation and separation of particles was studied and compared with straight-cut profile of DEP microelectrodes. This was due to its ability to perform selective manipulation and separation processes using polystyrene (Ps) engineered particles and biological cells, red blood cells and platelets. Polarisation factor modelling and dielectric properties change between particles explain the ability of tapered DEP microelectrodes to select target particles.
In order to determine the F
DEP for an electrostatic or quasi-static applied field due to the translational force experienced, the parameters of the intrinsic dielectric properties of the particles and medium need to be understood. The reaction of the dynamic dielectric properties of the particles and medium-induced dipole moments are aligned parallel to or against the high intensity electric field sources. This interaction results in the transformation of different and unique dielectric polarisation factors of particles suspended in liquid medium when exposed to the non-uniform electric field ∇
E. Furthermore, utilising tapered DEP microelectrodes to generate two spots of higher intensity electric field allows different types of particle detection and lateral and vertical manipulation applications to be conducted. Therefore, the fine-tuning of alternating current (AC) input frequency is selected as the control parameter. Consequently, the connection of dynamic dielectric properties of particles, medium and electric field are abbreviated using the Clausius–Mossotti factor (CMF) in F
DEP formulation as in Equation (1):
where
εoεm is the absolute permittivity of the suspending medium,
εo is the permittivity for vacuum 8.854 × 10
−12 F/m and
εm is the relative permittivity of the suspending medium. The induced dipole moment is a ponderomotive effect interrelated to the particle volume,
r3. For larger particles, a higher magnitude of F
DEP is experienced while the CMF represents the effective electrical polarisability due to the dynamic dielectric properties of the particle in relation to the surrounding of the medium. The frequency dependent reaction is formulated by
where
and
The εparticle represents the absolute permittivity of the particle, σparticle is the conductivity of the particle and σmedium represents the conductivity of the medium. The polarisation factor efficiency of CMF varies from 1 to 0 for positive DEP forces (PDEP) and from 0 to −0.5 for negative DEP forces (NDEP). At a CMF of 0, the PDEP and NDEP value forces are equal to static conditions known as crossover frequency (fxo) for each type of particles. The CMF value is formulated based on the intrinsic dielectric properties such as the permittivity and conductivity of the particles and medium subjected to the input frequencies applied of the AC electric field. The implementation of tapered DEP microelectrodes proliferates the non-uniformity of the electric gradient. In consequence, the two spots of higher intensity electric field enable the enhancement of the sensitivity and selectivity of detection with lateral and vertical manipulation capabilities.
The two main challenges in applying DEP involves (i) a high medium conductivity (normally in biological application) and (ii) a higher magnitude of electric fields due to the miniaturisation of DEP microelectrodes. This creates an electrothermal motion in the aqueous solution which is also known as the Joule heating effect [
26,
27,
28]. This can be assumed to be the advantage of tapered DEP microelectrodes where dominant DEP forces generated eliminate the need for splitting one spot of intensity electric field into two spots of intensity electric fields. The reduced magnitude electric field is exposed to medium and suspended particles. In parallel, reducing a higher magnitude electric field application enables the minimisation of issues in the electrohydrodynamic force of a higher medium conductivity. This results in the DEP force appearing to be dominant, followed by electrothermal flows that affect the electrohydrodynamic force in DEP.
2. Prior Art Dielectrophoresis
In this review, the classification of straight-cut DEP microelectrodes configurations is summarised. They are divided into 12 different configurations [
29]. Within each type, introduction techniques are classified based on their working mechanisms with their advantages and limitations discussed. Different configurations are made based on current fabrication technologies, as a solution to existing problems, and to meet innovation and application requirements. The classification of the straight-cut profile DEP microelectrodes configuration are as follows:
1. Interdigitated
The layout and design of this type of microelectrode are parallel between the two poles of adjacent bar microelectrodes. Today, interdigitated configurations are widely used in DEP’s core investigations since they can be easily fabricated with many existing references. In fact, interdigitated microelectrodes are the initial development of the DEP microelectrodes miniaturisation process after the development of the DEP concept that uses wire microelectrodes.
2. Castellated
The layout and design of this type of microelectrode are opposite to the two polar-shaped microelectrodes poles. Similar to the interdigitated, the castellated has been also greatly developed. There is no significant difference between the interdigitated and castellated. However, the DEP response for the interdigitated is adjacent to the two microelectrodes. In contrast to the castellated, the DEP response is the opposite of two microelectrodes.
3. Oblique
The layout and design of this type of microelectrode are adjacent to the two polar bars. The straight bar microelectrode pair has a larger opening prefix and tends to be the end of a smaller opening distance. Oblique microelectrodes are suitable for the continuous flow separation of particles in the microfluidic level. Consequently, the configuration of the oblique electrode has been developed for DEP fluid flow fraction (FFF) application.
4. Curved
The layout and design of this type of microelectrode are adjacent to the two pole polar bars like the oblique microelectrodes. The difference is that the curved microelectrode bar has a large prefix and narrows at the end of the openings. In addition to improving the functionality of the oblique electrode, the development of the curved electrode is performed with the capability to enhance the selectivity and sensitivity by producing a high intensity electric field at the end of the electrode tip.
5. Quadrupole
This microelectrode is structured quad-rectangular between four different input frequency phases to produce an electric field rotation. The configuration of the quadrupole electrode is used for detailed particle manipulation with droplet sample application. Different frequency input phases rotate the particles’ orientation by changing the input frequency phase supplied on the quadrupole electrode.
6. Microwell
The layout and design of this type of microelectrode are round circular microelectrodes like donuts. The microwell electrode configuration is used to trap target particles in circular electrodes with droplet sample applications. Manipulated on different input frequencies applied, the microwell electrode traps the target or non-target particles based on the CMF polarisation factor.
7. Matrix
The layout and design of this type of microelectrode are round or rectangular microelectrodes composed by adjacent microelectrodes in opposite poles. The matrix electrode configuration is utilised to trap the target or non-target particles on the top surface of the electrode under PDEP forces. This is different for the interdigitated, castellated, oblique and curved microelectrodes in which the DEP response changes the position away from the electrode under NDEP force.
8. Extruded
This microelectrode is round or rectangular with an adjacent polar microelectrode. The separation process of the extruded electrode is performed by combining the DEP force and pillar structure between the two DEP microelectrodes. The target particles are only impressed with the DEP force, otherwise the non-target particles will be trapped between pillar structures.
9. Top-bottom patterned
These are parallel microelectrodes between two poles of the adjacent bar microelectrodes that intertwine polarities with each other. These electrodes are patterned in the upper and lower position. It enhances DEP forces exposed to target and non-target particles but with a complex fabrication process.
10. Sidewall patterned
The layout and design of this type of microelectrode are built on the edge wall of the medium flow channel. The opposite microelectrodes are similar since the poles and adjacent microelectrodes are different poles. The benefit of this configuration is that it is suitable for continuous flow application, particularly for FFF. However, this configuration requires many microelectrodes and long microchannels for separation application.
11. Insulator-based or electrodeless
The layout and design of this type of microelectrode are built on the sides, left and right only. In the middle, there is an insulating material forming the membrane columns that trap the particles from the electric field, resulting in the microelectrodes side of the left and right. This configuration is similar to the extruded microelectrodes using pillars or membrane columns for separation applications.
12. Contactless
These electrodes are built on the edge sidewall patterned microelectrodes. The advantage of this type of DEP electrode lies on the contactless microelectrodes configuration that is not directly exposed to the medium and particles. The DEP forces are exposed to target and non-target particles via a specific microchannel.
The differences in operating strategies are based on the configurations of the microelectrode, which are divided into 8 different strategies. The classification of the operation strategy on the lateral attraction at the y-axis or vertical repulsion of the z-axis of DEP device [
29] are as follows:
1. Lateral sorting at the y-axis
The operation strategy of the manipulation and separation process is used when the particles are diverted horizontally across channels since the NDEP force is horizontal at the y-axis at different distance magnitude positions. The manipulation and separation processes depend on the magnitude and drag of the medium flow rate using curved microelectrodes. At high velocities of the medium flow, the particles are concentrated in between two microelectrodes. On the other hand, if the velocity of the particles is low, it will be deduced at the edge of microelectrodes.
2. Electrothermal-assisted at the y-axis
The operation strategy of this manipulation and separation processes is used when a high conductivity medium is used to impose an electrothermal vortex in the DEP chamber. The PDEP attraction exposure on the y-axis manipulates the particles from the location of the electrodes to the end of the electrodes at the centre of the meeting of four bar microelectrodes. This operation strategy uses the droplet technique to minimise sample usage.
3. Multiple frequencies at the y-axis
The operation strategy of the manipulation and separation processes is used when the particles are exposed to two or more sources of electric fields with different input frequency values between the two adjacent microelectrodes. This strategy allows particles to be exposed to the attraction of PDEP at the y-axis, which is similar to the electrothermal-assisted at the y-axis using the droplet technique to minimise sample usage.
4. Gravitational Field Flow Fraction at the z-axis
The operation strategy for floating particles or levitation particles is based on the NDEP force vertically at the z-axis at different magnitude of altitude positions. The parabolic flow of the medium causes different velocity particles for different masses of particles weight. This operation strategy is the basic and common method in DEP based on interdigitated microelectrodes, which is suitable for continuous flow using an FFF separation.
5. Multistep at the z-axis
In this method, particles are trapped and released through PDEP attraction vertically at the z-axis at different magnitudes of altitude positions. The parabolic flow of the medium causes particles to move based on radius and polarisation factors. This operation strategy is similar to the gravitational field flow fraction at the z-axis using interdigitated microelectrodes. However, the manipulation input frequency is applied by stepping on “on” and “off”.
6. Barrier-assisted at the z-axis
Particles are rejected and lifted due to the NDEP force vertically on the z-axis. The particles are trapped behind the pillars that interrupt the drag of the medium flow using extruded insulator-based or electrodeless microelectrodes. The integration of interdigitated microelectrodes or end-to-end microelectrodes is suitable for continuous flow of an FFF application.
7. Travelling wave at the z-axis
Wave travel is generated by microelectrodes with quadrature phases of 0°, 90°, 180° and 270°, and particles movement occurs due to the NDEP force exposure vertically on the z-axis against the particles. At the same time, particles are exposed to wave travel that is parallel to the substrate. Different types of particle are directed to different directions.
8. Pulsed DEP at the z-axis
Particles are exposed to FDEP that signals on and off, causing particles to compete with the drag of the medium stream. The particles are pushed forward between two points depending on size. This operation strategy is similar to the gravitational field flow fraction at the z-axis and multistep at the z-axis. The difference is that the NDEP force at the z-axis is used for manipulation and separation processes in the static fluid or droplet technique.
Based on the literature review on the straight-cut DEP microelectrodes, most of the work operating strategies are optimally done by P
DEP and N
DEP related to the lateral attraction or vertical repulsion. Lateral attraction happens when the particle movement is from a horizontal direction at the y-axis from a low electric field area towards to the top edge of the straight-cut DEP microelectrodes under P
DEP conditions. In contrast for N
DEP, the particles’ movements are vertically directed to the z-axis from a high electric field area towards a low electric field.
Figure 2 illustrates the simulation and the experimental results of a lateral attraction at the y-axis movement using the straight-cut DEP microelectrodes of the castellated and polynomial. High intensity electric fields are located on the edge of the microelectrodes. Experiments are performed by exposing P
DEP particles at the edges of the microelectrode walls and N
DEP in between the two microelectrodes. Based on the simulation and experimental results, high intensity electric field areas produced P
DEP that expose the lateral attraction or N
DEP exposure lateral repulsion [
30,
31,
32,
33].
Vertical movement at the z-axis occurs when particles are vertically attracted toward or repel away from the area edges of a higher intensity electric field of the straight-cut DEP microelectrodes. In
Figure 3, the left side shows the evolution of DEP technology led by Ronald Pethig and Peter Gascoyne. Pethig developed a DEP system named ApoStream
TM3 [
34,
35,
36,
37]. The separation ApoStreamTM system application is used as a monitoring system for a metastatic tumour disease known as tumour cell carcinoma. The system works by separating and enumerating the mixture of tumor and normal cells by vertical repulsion, respectively, at the z-axis. Tumors cells are vertically attracted to the microelectrodes, which are accumulated at the surface of microelectrodes. This is in contrast for normal cells that are vertically repelled away from microelectrodes and later accumulated at above the microelectrodes’ surface. Hydrodynamic fluid flow fractionates both cells at the x-axis and are collected at the bottom and middle areas of the fluid flow channel shown in
Figure 3. The figure on the right displays a similar configuration of the application based on straight-cut DEP microelectrodes. The N
DEP force vertically repels the normal cells, while the P
DEP force attracts the tumor cells. The F
DEP source is on the upper edges of the microelectrodes. Thus, the separation process occurs at the z-axis only with different magnitude of strengths. The P
DEP vertically attracts the tumor cells while the N
DEP vertically repels the normal cells. The electric field that builds the F
DEP for both systems is a series of the fluid flow path of the medium in the x-axis utilising the hydrodynamic of the parabolic fluid flow fractionated by skimming both cells at the end of the microfluidic channel.
A thorough review involving the lateral attraction or vertical repulsion has reported two different modes, which are lateral attraction or vertical repulsion (
Table 1). Several studies in the lateral attraction mode only by the implementation of P
DEP and N
DEP forces have been completed. These are similar to the vertical repulsion mode by the implementation of P
DEP and N
DEP forces which results in the manipulation and separation that occurs at one direction of the axis with different magnitudes. This method requires many microelectrode structures and is a time-consuming approach. To the best our knowledge, there is no study available on the combination of lateral attraction and vertical repulsion. This is important to generate two different directions of axis at the y- and z-axes for a better yield of manipulation or separation. Such a study is important for the rapid and selective multifunctional DEP manipulation at two different drive directions and locations by P
DEP, the lateral attraction at the y-axis to the top surface of microelectrodes, and N
DEP, the vertical repulsion at the z-axis between two microelectrodes. Subsequently, this study presents perspective developments of the tapered DEP microelectrodes for lateral and vertical manipulation as well as the separation application at two different locations simultaneously.
5. Summary and future perspectives
There are two types of DEP microelectrode sidewall profiles that expose the particles to the non-uniform electric field. The conventional configuration is the straight-cut profile [
42,
43,
44] while innovative designs are based on the tapered DEP microelectrodes. In this review, we critically analysed microelectrode configurations and operating strategies and presented the opportunity for further enhancing the DEP capability in selective detection and rapid manipulation applications. The tapered DEP microelectrodes capability, the versatile mechanism by lateral attraction and vertical repulsion are alternative solutions for improving the lateral attraction or vertical repulsion only. The application of tapered DEP microelectrodes is towards the separation at two different locations rather than the straight-cut profile at one location only with different magnitude of attraction or repulsion for separation applications. Inspired by two-hands manipulation, the right and left hand side in manipulating the target and untargeted in two different locations should enhance the DEP selectivity. This review discussed the work in manipulating one type of particle known as Ps 10 µm, the separation of two types of biological cells namely RBC and platelets as well as the separation of three types of particle, namely 10 µm, 3 µm and 1 µm. Experimental work observations show the manipulation evidently at two different locations, which were at the top surface and between two tapered DEP microelectrodes. The critical and crucial points are during the applications involving biomolecules, for instance, in drug delivery and development in artificial organs. Particularly, mimicking human kidneys filtration requires a precision method. Thus, the combination of lateral attraction and vertical repulsion has been proposed to be an alternative solution instead of lateral attraction or vertical repulsion only. The concept of tapered DEP microelectrodes manipulation is proven using two different hands to achieve two different locations simultaneously. Compared to the lateral attraction or vertical repulsion only, this method enhances the manipulation capability and controllability instead of lateral or vertical manipulation using only one hand.
Since its inception, DEP studies utilise straight-cut microelectrodes that generate one spot of higher intensity electric field at the top edge of sidewall microelectrodes as shown in
Table 1. However, from 2015, with the implementation of advanced miniaturisation of microfabrication process technology, the tapered DEP microelectrodes that generate two spots of higher intensity electric field at the bottom and top edge of microelectrode sidewall is introduced. The advantage of generating two spots of higher intensity electric field is that ∇
E generates two spots of force sources at the bottom and top edge of tapered profile microelectrodes. The main intention is to firmly enhance the selective detection and rapid manipulation with the capability of two different location positionings and stationings. Firm selective detection and rapid manipulation are referred to the movement of particles by stages. For example, particles exposed to P
DEP by lateral attraction at the y-axis. Initially, particles at the bottom edge move to the top edge microelectrodes before stationing at the top surface of the tapered DEP microelectrodes. Designated particles are exposed to N
DEP by vertical repulsion at the z-axis. Originally, particles positioned at the top edge moved to the bottom edge of the microelectrodes before stationing between two tapered DEP microelectrodes. The capability of selective detection and rapid manipulation at two different locations by lateral and vertical occurred simultaneously. This results in the selective detection and rapid manipulation of target and untargeted particles at the top surface and between two tapered DEP microelectrodes. The position determination of target and untargeted particle is done using CMF polarisation factors of
fxo and
fadj defined to be in or out of regions of interest at two different stations of location ends. This study introduces the selective detection and rapid manipulation F
DEP by combining P
DEP and N
DEP simultaneously via the implementation of tapered profile DEP microelectrodes. Efficient selective detection and rapid manipulation have been carried out utilising versatile mechanism laterally and vertically positioning and stationing with optimum input frequency
fadj related to
fxo. The outcome of the implementation of the tapered DEP microelectrodes was the combination of two different force directions [
40] fabricated with CMOS Compatible fabrication technology [
41]. This further results in the positioning and stationing of target/untargeted particles at the regions of interest with higher selective detection and rapid manipulation. This mechanism is validated using different sizes of engineered particle Ps and different types of biological cells. Thus, this study proposes a method by establishing alternative option for specification that requires both lateral and vertical manipulations, which can be compared with vertical or lateral manipulation designated at one specific location with separation capabilities by different magnitudes.
Since its inception, DEP studies utilise straight-cut microelectrodes that generate one spot of higher intensity electric field at the top edge of sidewall microelectrodes as shown in
Table 1. However, from 2015, with the implementation of advanced miniaturisation of microfabrication process technology, the tapered DEP microelectrodes that generate two spots of higher intensity electric field at the bottom and top edge of microelectrode sidewall is introduced. The advantage of generating two spots of higher intensity electric field is that ∇
E generates two spots of force sources at the bottom and top edge of tapered profile microelectrodes. The main intention is to firmly enhance the selective detection and rapid manipulation with the capability of two different location positionings and stationings. Firm selective detection and rapid manipulation are referred to the movement of particles by stages. For example, particles exposed to P
DEP by lateral attraction at the y-axis. Initially, particles at the bottom edge move to the top edge microelectrodes before stationing at the top surface of the tapered DEP microelectrodes. Designated particles are exposed to N
DEP by vertical repulsion at the z-axis. Originally, particles positioned at the top edge moved to the bottom edge of the microelectrodes before stationing between two tapered DEP microelectrodes. The capability of selective detection and rapid manipulation at two different locations by lateral and vertical occurred simultaneously. This results in the selective detection and rapid manipulation of target and untargeted particles at the top surface and between two tapered DEP microelectrodes. The position determination of target and untargeted particle is done using CMF polarisation factors of
fxo and
fadj defined to be in or out of regions of interest at two different stations of location ends. This study introduces the selective detection and rapid manipulation F
DEP by combining P
DEP and N
DEP simultaneously via the implementation of tapered profile DEP microelectrodes. Efficient selective detection and rapid manipulation have been carried out utilising versatile mechanism laterally and vertically positioning and stationing with optimum input frequency
fadj related to
fxo. The outcome of the implementation of the tapered DEP microelectrodes was the combination of two different force directions [
40] fabricated with CMOS Compatible fabrication technology [
41]. This further results in the positioning and stationing of target/untargeted particles at the regions of interest with higher selective detection and rapid manipulation. This mechanism is validated using different sizes of engineered particle Ps and different types of biological cells. Thus, this study proposes a method by establishing alternative option for specification that requires both lateral and vertical manipulations, which can be compared with vertical or lateral manipulation designated at one specific location with separation capabilities by different magnitudes.
DEP’s innovation integration with “lab-on-chip” technology is one of the best solutions available today. Improvement through the integration of CMOS-MEMS standardised fabrication technology for developing tapered DEP profile with microfluidic microchannel technology for medium-flow channels has succeeded in producing DEP labs-on-chips capable of performing particle selective detection and rapid manipulation processes at high efficiency. This high-efficiency definition explains the ability of tapered DEP microelectrodes to manipulate and separate particles in two directions in two different locations at one input frequency value applied. The particle movement is seen horizontally with the P
DEP attraction on the y-axis and vertically with the N
DEP push force on the z-axis using an input
fadj based on
fxo of target and untargeted particles. Therefore, it is considered a solution for the effects of major problems including physical contact with particles. In addition, it can reduce the contamination of particles and mediums due to direct contact and the addition of contaminated materials such as marker colour and magnetic. This review introduced and opened the ways for a rapid, label free, precision method to carry out selective detection and rapid manipulation of mixtures of red blood cells and platelets. Further potential applications are for protein, toxins, cancer cells and bacteria detection and removal. The determination of the lateral and vertical dielectrophoresis forces was done simultaneously through a new configuration of DEP microelectrodes arrays with a tapered side wall profile. Based on the analysis from this study, two directions of motion have been established by obtaining a new crossover frequency defined as adjustment frequency,
fadj. The
fadj was within the value between the
fxo of RBC and platelets. The innovative design of tapered DEP microelectrodes arrays enabled F
DEP to selectively detect and rapidly manipulate RBC and platelets efficiently resulting in the identification and separation at two different locations. The selective detection and rapid manipulation at two different locations are at the top surface of microelectrodes and between two microelectrodes by DEP force [
45,
46,
47,
48].
These successes permit this work to introduce the dielectrophoretic sensor mechanism of fxo to detect different types of engineered particle and biological sample. In parallel, the dielectrophoretic actuator mechanism of fadj manipulates the target sample by the PDEP and NDEP forces. This proves the concepts for developing tapered DEP microelectrodes for both selective detection and rapid manipulation utilising a dielectrophoretic sensor and actuator. In terms of future perspectives based on communication with Ronald Pethig via Researchgate, he wrote, “When it comes to isolating target cells from a cell mixture, it would be better to think in terms of capturing the unwanted cells at the microelectrodes and repelling the target cells into the flowing bulk medium, so as to reduce the possible harmful effects of a strong field gradient on the membrane. Best wishes to you and your work.” The application of tapered DEP microelectrodes as suggested by Pethig captures unwanted cells by PDEP lateral attraction at the y axis to the top surface of the microelectrodes as well as NDEP vertical repulsion at the z axis repelling the target cells into the flowing bulk medium in between two tapered DEP microelectrodes for collection. This versatile filtration is one of the potentials for a glomerular-based membrane in artificial kidneys development.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}