
Recent Advances in Tactile Sensory Systems: Mechanisms, Fabrication, and Applications
 , and
, and
Abstract
:1. Introduction
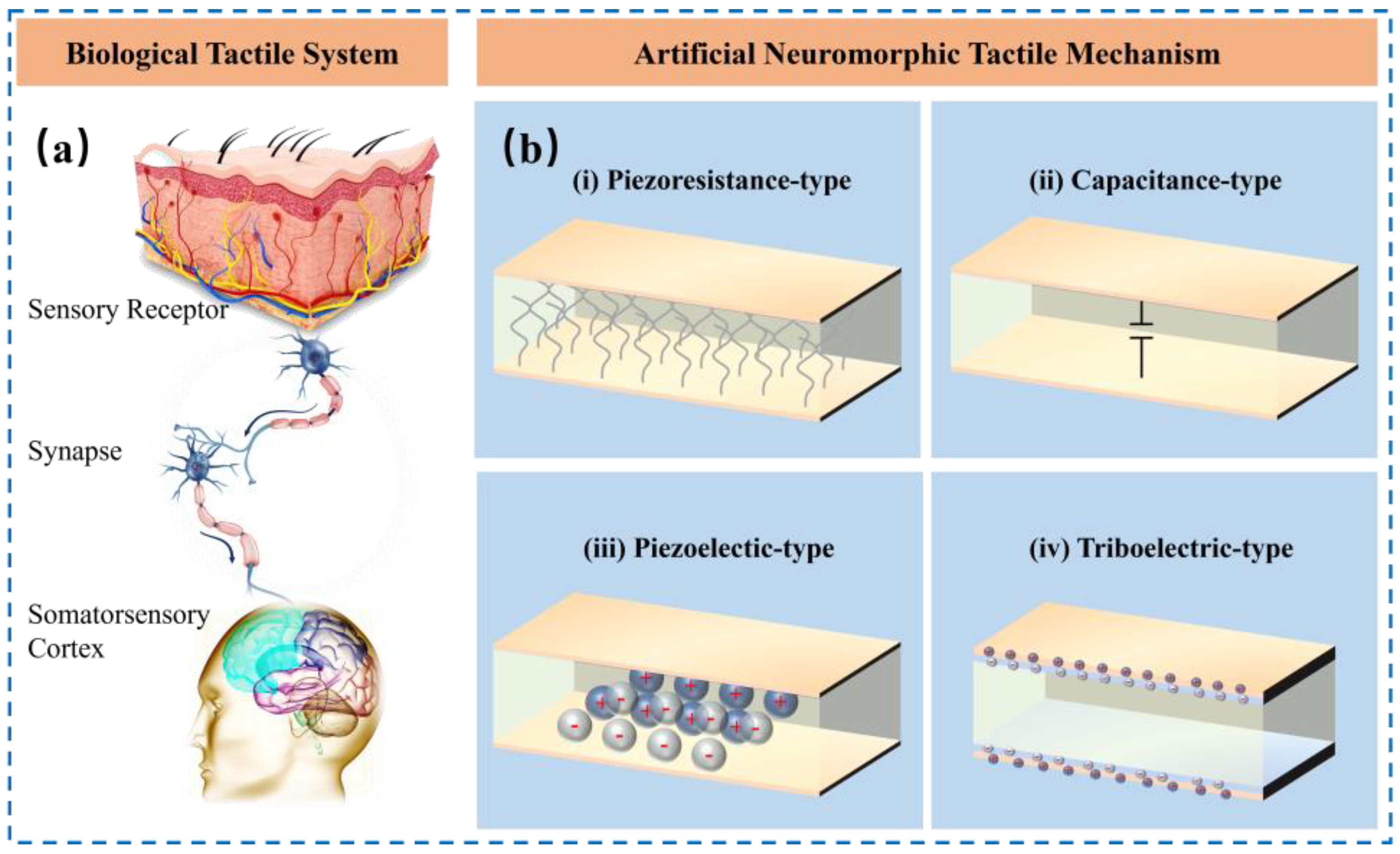
2. Mechanisms for Designing Tactile Sensors
2.1. Piezoresistive Tactile Sensors
2.2. Capacitance-Based Tactile Sensors
2.3. Piezoelectric Tactile Sensors
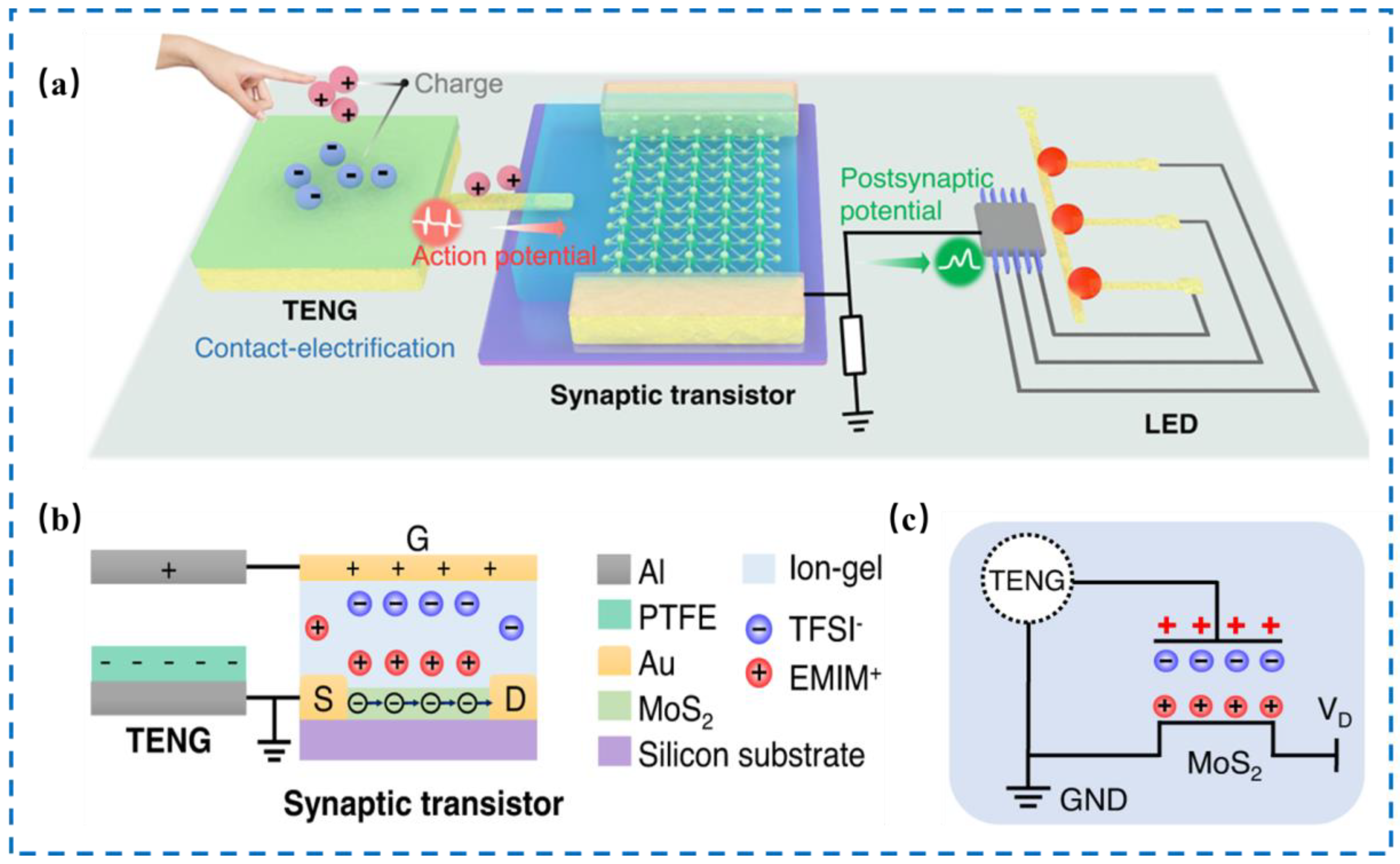
2.4. Triboelectric Tactile Sensors
3. Fabrication Techniques for Tactile Sensors
3.1. Inkjet Printing
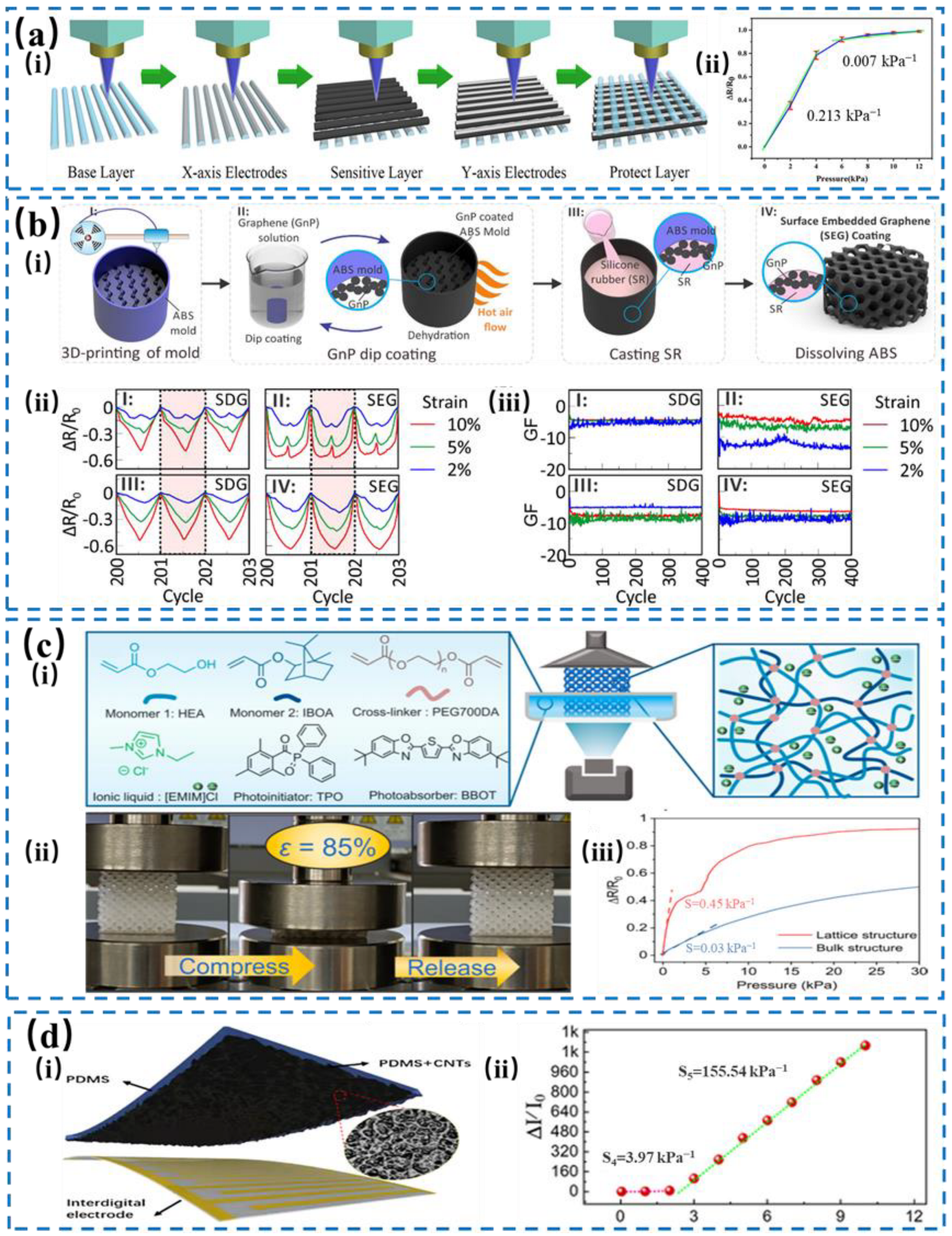
3.2. Three-Dimensional (3D) Printing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Materials | Resolution | Advantages | Disadvantages | Ref. |
|---|---|---|---|---|---|
| DIW | Polymer, e.g., hydrogel Electronic materials, e.g., semiconductor and conductor | 1~100 μm | High resolution Material versatility Customization and complexity | High equipment costs Low printing speed Material limitations Low durability and longevity | [104,105,106] |
| FDM | Thermoplastic materials, e.g., cellulose nanocrystals and polymer composites | 50~400 μm | Material accessibility Ease of use Structural integrity Customization and flexibility Rapid prototyping | Limited resolution Material limitations Printed layer visibility Potential for warping and shrinkage | [107,108,109] |
| DLP | Photopolymer and its composites | 25~100 μm | High resolution Smooth surface finish Rapid prototyping Material versatility Consistency | Limited build volume Material cost and availability Post-processing Sensitive to light and storage conditions | [110,111,112,113] |
| SLA | Photopolymer and its composites | 25~100 μm | High resolution Smooth surface finish Material versatility Consistency High elaboration of detail | Limited build volume High cost for material, operation and maintenance Post-processing Limited durability | [114,115,116,117,118] |
| MJP | Photopolymer and thermoplastic materials | <300 μm | High resolution Multi-material printing Smooth surface finish High precision and consistency Efficient use of materials | High material cost Post-processing Limited durability Limited build volume | [119,120,121] |
3.3. Four-Dimensional (4D) Printing
3.4. Transfer Printing
4. Representative Applications of Tactile Sensors
4.1. Intelligent Robotics
4.2. Wearable Devices
4.3. Prosthetics
4.4. Health Care
5. Challenges and Perspectives
5.1. Power Consumption of Tactile Sensors
5.2. Stability and Endurance of Tactile Sensors
5.3. Feedback Time of Tactile Sensors
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, S.; Lee, Y.; Kim, H.-D.; Choi, S.-J. A tactile sensor system with sensory neurons and a perceptual synaptic network based on semivolatile carbon nanotube transistors. NPG Asia Mater. 2020, 12, 76. [Google Scholar] [CrossRef]
- Skedung, L.; Arvidsson, M.; Chung, J.Y.; Stafford, C.M.; Berglund, B.; Rutland, M.W. Feeling Small: Exploring the Tactile Perception Limits. Sci. Rep. 2013, 3, 2617. [Google Scholar] [CrossRef]
- Chun, S.; Kim, J.-S.; Yoo, Y.; Choi, Y.; Jung, S.J.; Jang, D.; Lee, G.; Song, K.-I.; Nam, K.S.; Youn, I.; et al. An artificial neural tactile sensing system. Nat. Electron. 2021, 4, 429–438. [Google Scholar] [CrossRef]
- Luo, Y.; Li, Y.; Sharma, P.; Shou, W.; Wu, K.; Foshey, M.; Li, B.; Palacios, T.; Torralba, A.; Matusik, W. Learning human–environment interactions using conformal tactile textiles. Nat. Electron. 2021, 4, 193–201. [Google Scholar] [CrossRef]
- Hu, Z.; Lin, L.; Lin, W.; Xu, Y.; Xia, X.; Peng, Z.; Sun, Z.; Wang, Z. Machine Learning for Tactile Perception: Advancements, Challenges, and Opportunities. Adv. Intell. Syst. 2023, 5, 2200371. [Google Scholar] [CrossRef]
- Schuman, C.D.; Kulkarni, S.R.; Parsa, M.; Mitchell, J.P.; Date, P.; Kay, B. Opportunities for neuromorphic computing algorithms and applications. Nat. Comput. Sci. 2022, 2, 10–19. [Google Scholar] [CrossRef]
- Li, L.; Zhang, W.; Ren, Z.; Chang, L.; Xu, X.; Hu, Y. Endowing actuators with sensing capability: Recent progress on perceptive soft actuators. Chem. Eng. J. 2024, 479, 147550. [Google Scholar] [CrossRef]
- Peng, Y.; Yang, N.; Xu, Q.; Dai, Y.; Wang, Z. Recent Advances in Flexible Tactile Sensors for Intelligent Systems. Sensors 2021, 21, 5392. [Google Scholar] [CrossRef] [PubMed]
- Nahavandi, D.; Alizadehsani, R.; Khosravi, A.; Acharya, U.R. Application of artificial intelligence in wearable devices: Opportunities and challenges. Comput. Methods Programs Biomed. 2022, 213, 106541. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Wang, W.; Yu, H. Endowing Soft Photo-Actuators with Intelligence. Adv. Intell. Syst. 2019, 1, 1900050. [Google Scholar] [CrossRef]
- Sun, J.; Hua, Q.; Zhao, M.; Dong, L.; Chang, Y.; Wu, W.; Li, J.; Chen, Q.; Xi, J.; Hu, W.; et al. Stable Ultrathin Perovskite/Polyvinylidene Fluoride Composite Films for Imperceptible Multi-Color Fluorescent Anti-Counterfeiting Labels. Adv. Mater. Technol. 2021, 6, 2100229. [Google Scholar] [CrossRef]
- Zhang, J.; Yao, H.; Mo, J.; Chen, S.; Xie, Y.; Ma, S.; Chen, R.; Luo, T.; Ling, W.; Qin, L.; et al. Finger-inspired rigid-soft hybrid tactile sensor with superior sensitivity at high frequency. Nat. Commun. 2022, 13, 5076. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.C.; Mun, J.; Kwon, S.Y.; Park, S.; Bao, Z.; Park, S. Electronic Skin: Recent Progress and Future Prospects for Skin-Attachable Devices for Health Monitoring, Robotics, and Prosthetics. Adv. Mater. 2019, 31, 1904765. [Google Scholar] [CrossRef] [PubMed]
- Chortos, A.; Liu, J.; Bao, Z. Pursuing prosthetic electronic skin. Nat. Mater. 2016, 15, 937–950. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Su, Y.; Zheng, H.; Chen, F.; Li, X.; Tan, Y.; Zhou, Z. An Artificial Intelligence-Motivated Skin-Like Optical Fiber Tactile Sensor. Adv. Intell. Syst. 2023, 5, 2200460. [Google Scholar] [CrossRef]
- Wang, Z.; Xiao, C.; Roy, M.; Yuan, Z.; Zhao, L.; Liu, Y.; Guo, X.; Lu, P. Bioinspired skin towards next-generation rehabilitation medicine. Front. Bioeng. Biotechnol. 2023, 11, 1196174. [Google Scholar] [CrossRef]
- Hua, Q.; Shen, G. Full-system-integrated neuro-inspired memristor chips for edge intelligence. Sci. Bull. 2023, 68, 3108–3110. [Google Scholar] [CrossRef]
- Sydnor, V.J.; Satterthwaite, T.D. Neuroimaging of plasticity mechanisms in the human brain: From critical periods to psychiatric conditions. Neuropsychopharmacology 2023, 48, 219–220. [Google Scholar] [CrossRef]
- Toricelli, M.; Pereira, A.A.R.; Souza Abrao, G.; Malerba, H.N.; Maia, J.; Buck, H.S.; Viel, T.A. Mechanisms of neuroplasticity and brain degeneration: Strategies for protection during the aging process. Neural Regen. Res. 2021, 16, 58–67. [Google Scholar] [CrossRef]
- Price, R.B.; Duman, R. Neuroplasticity in cognitive and psychological mechanisms of depression: An integrative model. Mol. Psychiatry 2020, 25, 530–543. [Google Scholar] [CrossRef]
- Shi, Y.; Hua, Q.; Dong, Z.; Wang, B.; Dai, X.; Niu, J.; Cui, Z.; Huang, T.; Wang, Z.L.; Hu, W. Neuro-inspired thermoresponsive nociceptor for intelligent sensory systems. Nano Energy 2023, 113, 108549. [Google Scholar] [CrossRef]
- Hu, G.; An, H.; Xi, J.; Lu, J.; Hua, Q.; Peng, Z. A ZnO micro/nanowire-based photonic synapse with piezo-phototronic modulation. Nano Energy 2021, 89, 106282. [Google Scholar] [CrossRef]
- Sangwan, V.K.; Hersam, M.C. Neuromorphic nanoelectronic materials. Nat. Nanotechnol. 2020, 15, 517–528. [Google Scholar] [CrossRef]
- Ham, D.; Park, H.; Hwang, S.; Kim, K. Neuromorphic electronics based on copying and pasting the brain. Nat. Electron. 2021, 4, 635–644. [Google Scholar] [CrossRef]
- Hua, Q.; Cui, X.; Ji, K.; Wang, B.; Hu, W. Piezotronics enabled artificial intelligence systems. J. Phys. Mater. 2021, 4, 022003. [Google Scholar] [CrossRef]
- Chi, C.; Sun, X.; Xue, N.; Li, T.; Liu, C. Recent Progress in Technologies for Tactile Sensors. Sensors 2018, 18, 948. [Google Scholar] [CrossRef]
- Mohammadi, A.; Tan, Y.; Choong, P.; Oetomo, D. Flexible mechanical metamaterials enabling soft tactile sensors with multiple sensitivities at multiple force sensing ranges. Sci. Rep. 2021, 11, 24125. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Abidian, M.R.; Ahn, J.-H.; Akinwande, D.; Andrews, A.M.; Antonietti, M.; Bao, Z.; Berggren, M.; Berkey, C.A.; Bettinger, C.J.; et al. Technology Roadmap for Flexible Sensors. ACS Nano 2023, 17, 5211–5295. [Google Scholar] [CrossRef]
- Liu, Y.; Bao, R.; Tao, J.; Li, J.; Dong, M.; Pan, C. Recent progress in tactile sensors and their applications in intelligent systems. Sci. Bull. 2020, 65, 70–88. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Dong, C.; Wang, X.; Li, M.; Nan, T.; Liang, X.; Chen, H.; Wei, Y.; Zhou, H.; Zaeimbashi, M.; et al. Highly sensitive integrated flexible tactile sensors with piezoresistive Ge2Sb2Te5 thin films. NPJ Flex. Electron. 2018, 2, 17. [Google Scholar] [CrossRef]
- Birkoben, T.; Winterfeld, H.; Fichtner, S.; Petraru, A.; Kohlstedt, H. A spiking and adapting tactile sensor for neuromorphic applications. Sci. Rep. 2020, 10, 17260. [Google Scholar] [CrossRef]
- Xu, B.; Chen, D.; Wang, Y.; Tang, R.; Yang, L.; Feng, H.; Liu, Y.; Wang, Z.; Wang, F.; Zhang, T. Wireless and Flexible Tactile Sensing Array Based on an Adjustable Resonator with Machine-Learning Perception. Adv. Electron. Mater. 2023, 9, 2201334. [Google Scholar] [CrossRef]
- Hua, Q.; Shen, G. Low-dimensional nanostructures for monolithic 3D-integrated flexible and stretchable electronics. Chem. Soc. Rev. 2024, 53, 1316–1353. [Google Scholar] [CrossRef]
- Luo, Y.; Zhao, L.; Luo, G.; Dong, L.; Xia, Y.; Li, M.; Li, Z.; Wang, K.; Maeda, R.; Jiang, Z. Highly sensitive piezoresistive and thermally responsive fibrous networks from the in situ growth of PEDOT on MWCNT-decorated electrospun PU fibers for pressure and temperature sensing. Microsyst. Nanoeng. 2023, 9, 113. [Google Scholar] [CrossRef]
- An, B.W.; Heo, S.; Ji, S.; Bien, F.; Park, J.-U. Transparent and flexible fingerprint sensor array with multiplexed detection of tactile pressure and skin temperature. Nat. Commun. 2018, 9, 2458. [Google Scholar] [CrossRef]
- Ma, X.; Song, C.; Zhang, F.; Dai, Y.; He, P.; Zhang, X. Soft, Multifunctional, Robust Film Sensor Using a Ferroelectret with Significant Longitudinal and Transverse Piezoelectric Activity for Biomechanical Monitoring. ACS Appl. Mater. Interfaces 2022, 14, 51291–51300. [Google Scholar] [CrossRef] [PubMed]
- Ji, B.; Zhou, Q.; Hu, B.; Zhong, J.; Zhou, J.; Zhou, B. Bio-Inspired Hybrid Dielectric for Capacitive and Triboelectric Tactile Sensors with High Sensitivity and Ultrawide Linearity Range. Adv. Mater. 2021, 33, 2100859. [Google Scholar] [CrossRef] [PubMed]
- VahidMohammadi, A.; Rosen, J.; Gogotsi, Y. The world of two-dimensional carbides and nitrides (MXenes). Science 2021, 372, eabf1581. [Google Scholar] [CrossRef] [PubMed]
- Gu, G.; Zhang, N.; Xu, H.; Lin, S.; Yu, Y.; Chai, G.; Ge, L.; Yang, H.; Shao, Q.; Sheng, X.; et al. A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback. Nat. Biomed. Eng. 2023, 7, 589–598. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Kim, B.; Shin, B.; Shin, D.; Lee, C.-K.; Chung, J.-S.; Seo, J.; Kim, Y.-T.; Sung, G.; Seo, W.; et al. Actuating compact wearable augmented reality devices by multifunctional artificial muscle. Nat. Commun. 2022, 13, 4155. [Google Scholar] [CrossRef]
- John, R.A.; Tiwari, N.; Patdillah, M.I.B.; Kulkarni, M.R.; Tiwari, N.; Basu, J.; Bose, S.K.; Ankit; Yu, C.J.; Nirmal, A.; et al. Self healable neuromorphic memtransistor elements for decentralized sensory signal processing in robotics. Nat. Commun. 2020, 11, 4030. [Google Scholar] [CrossRef] [PubMed]
- Park, S.H.; Kim, T.J.; Lee, H.E.; Ma, B.S.; Song, M.; Kim, M.S.; Shin, J.H.; Lee, S.H.; Lee, J.H.; Kim, Y.B.; et al. Universal selective transfer printing via micro-vacuum force. Nat. Commun. 2023, 14, 7744. [Google Scholar] [CrossRef] [PubMed]
- Huang, L.-B.; Han, J.-C.; Chen, S.; Sun, Z.; Dai, X.; Ge, P.; Zhao, C.-H.; Zheng, Q.-Q.; Sun, F.-C.; Hao, J. 4D-printed self-recovered triboelectric nanogenerator for energy harvesting and self-powered sensor. Nano Energy 2021, 84, 105873. [Google Scholar] [CrossRef]
- Wei, Y.; Li, B.; Domingos, M.; Qian, Z.; Zhu, Y.; Yan, L.; Ren, L.; Wei, G. Fully 3D printed flexible, conformal and multi-directional tactile sensor with integrated biomimetic and auxetic structure. Commun. Eng. 2023, 2, 80. [Google Scholar] [CrossRef]
- Minemawari, H.; Yamada, T.; Matsui, H.; Tsutsumi, J.y.; Haas, S.; Chiba, R.; Kumai, R.; Hasegawa, T. Inkjet printing of single-crystal films. Nature 2011, 475, 364–367. [Google Scholar] [CrossRef] [PubMed]
- Jing, M.; Zhou, J.; Zhang, P.; Hou, D.; Shen, J.; Tian, J.; Chen, W. Porous AgNWs/Poly(vinylidene fluoride) Composite-Based Flexible Piezoresistive Sensor with High Sensitivity and Wide Pressure Ranges. ACS Appl. Mater. Interfaces 2022, 14, 55119–55129. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Lei, X.; Xu, J.; Li, Y.; Wu, W.; Guo, X.; Ren, T.; Liu, F. High-Performance Porous PDMS-Based Piezoresistive Sensor Prepared by a Modified Microwave Irradiation Process. ACS Appl. Electron. Mater. 2022, 4, 5498–5505. [Google Scholar] [CrossRef]
- Wu, X.; Khan, Y.; Ting, J.; Zhu, J.; Ono, S.; Zhang, X.; Du, S.; Evans, J.W.; Lu, C.; Arias, A.C. Large-Area Fabrication of High-Performance Flexible and Wearable Pressure Sensors. Adv. Electron. Mater. 2020, 6, 1901310. [Google Scholar] [CrossRef]
- Goldoni, R.; Ozkan-Aydin, Y.; Kim, Y.-S.; Kim, J.; Zavanelli, N.; Mahmood, M.; Liu, B.; Hammond, F.L., III; Goldman, D.I.; Yeo, W.-H. Stretchable Nanocomposite Sensors, Nanomembrane Interconnectors, and Wireless Electronics toward Feedback–Loop Control of a Soft Earthworm Robot. ACS Appl. Mater. Interfaces 2020, 12, 43388–43397. [Google Scholar] [CrossRef]
- Aubeeluck, D.A.; Forbrigger, C.; Taromsari, S.M.; Chen, T.; Diller, E.; Naguib, H.E. Screen-Printed Resistive Tactile Sensor for Monitoring Tissue Interaction Forces on a Surgical Magnetic Microgripper. ACS Appl. Mater. Interfaces 2023, 15, 34008–34022. [Google Scholar] [CrossRef]
- Gu, G.; Zhang, N.; Chen, C.; Xu, H.; Zhu, X. Soft Robotics Enables Neuroprosthetic Hand Design. ACS Nano 2023, 17, 9661–9672. [Google Scholar] [CrossRef]
- Shim, H.; Sim, K.; Ershad, F.; Yang, P.; Thukral, A.; Rao, Z.; Kim, H.-J.; Liu, Y.; Wang, X.; Gu, G.; et al. Stretchable elastic synaptic transistors for neurologically integrated soft engineering systems. Sci. Adv. 2019, 5, eaax4961. [Google Scholar] [CrossRef]
- Yang, J.C.; Kim, J.-O.; Oh, J.; Kwon, S.Y.; Sim, J.Y.; Kim, D.W.; Choi, H.B.; Park, S. Microstructured Porous Pyramid-Based Ultrahigh Sensitive Pressure Sensor Insensitive to Strain and Temperature. ACS Appl. Mater. Interfaces 2019, 11, 19472–19480. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Tang, J.; Yuan, J.; Li, Y.; Dai, Y.; Yao, J.; Zhang, Q.; Ding, S.; Li, T.; Zhang, R.; et al. Large-Scale Integrated Flexible Tactile Sensor Array for Sensitive Smart Robotic Touch. ACS Nano 2022, 16, 16784–16795. [Google Scholar] [CrossRef] [PubMed]
- Wan, C.; Chen, G.; Fu, Y.; Wang, M.; Matsuhisa, N.; Pan, S.; Pan, L.; Yang, H.; Wan, Q.; Zhu, L.; et al. An Artificial Sensory Neuron with Tactile Perceptual Learning. Adv. Mater. 2018, 30, 1801291. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Chortos, A.; Xu, W.; Liu, Y.; Oh, J.Y.; Son, D.; Kang, J.; Foudeh, A.M.; Zhu, C.; Lee, Y.; et al. A bioinspired flexible organic artificial afferent nerve. Science 2018, 360, 998–1003. [Google Scholar] [CrossRef] [PubMed]
- Ha, K.-H.; Huh, H.; Li, Z.; Lu, N. Soft Capacitive Pressure Sensors: Trends, Challenges, and Perspectives. ACS Nano 2022, 16, 3442–3448. [Google Scholar] [CrossRef]
- Qiu, J.; Guo, X.; Chu, R.; Wang, S.; Zeng, W.; Qu, L.; Zhao, Y.; Yan, F.; Xing, G. Rapid-Response, Low Detection Limit, and High-Sensitivity Capacitive Flexible Tactile Sensor Based on Three-Dimensional Porous Dielectric Layer for Wearable Electronic Skin. ACS Appl. Mater. Interfaces 2019, 11, 40716–40725. [Google Scholar] [CrossRef]
- Yang, J.; Luo, S.; Zhou, X.; Li, J.; Fu, J.; Yang, W.; Wei, D. Flexible, Tunable, and Ultrasensitive Capacitive Pressure Sensor with Microconformal Graphene Electrodes. ACS Appl. Mater. Interfaces 2019, 11, 14997–15006. [Google Scholar] [CrossRef] [PubMed]
- Hsiao, Y.-L.; Jang, C.; Lin, Y.-M.; Wang, C.-H.; Liu, C.-P. Ultra-Low-Power and Wide-Operating-Voltage-Window Capacitive Piezotronic Sensor through Coupling of Piezocharges and Depletion Widths for Tactile Sensing. ACS Appl. Mater. Interfaces 2023, 15, 49338–49345. [Google Scholar] [CrossRef]
- Ge, C.; Yang, B.; Wu, L.; Duan, Z.; Li, Y.; Ren, X.; Jiang, L.; Zhang, J. Capacitive Sensor Combining Proximity and Pressure Sensing for Accurate Grasping of a Prosthetic Hand. ACS Appl. Electron. Mater. 2022, 4, 869–877. [Google Scholar] [CrossRef]
- Xi, J.; Javed, M.S.; Asim, S.; Idrees, M.; Shah, S.S.A.; Assiri, M.A.; Mai, W.; Hu, C. High-performance flexible supercapatteries enabled by binder-free two-dimensional mesoporous ultrathin nickel-ferrite nanosheets. Mater. Chem. Front. 2021, 5, 3436–3447. [Google Scholar] [CrossRef]
- Zang, Y.; Shen, H.; Huang, D.; Di, C.-A.; Zhu, D. A Dual-Organic-Transistor-Based Tactile-Perception System with Signal-Processing Functionality. Adv. Mater. 2017, 29, 1606088. [Google Scholar] [CrossRef]
- Khan, M.U.; Abbas, Y.; Rezeq, M.d.; Alazzam, A.; Mohammad, B. Unidirectional Neuromorphic Resistive Memory Integrated with Piezoelectric Nanogenerator for Self-Power Electronics. Adv. Funct. Mater. 2023, 2305869. [Google Scholar] [CrossRef]
- Lee, J.; Kim, S.; Park, S.; Lee, J.; Hwang, W.; Cho, S.W.; Lee, K.; Kim, S.M.; Seong, T.-Y.; Park, C.; et al. An Artificial Tactile Neuron Enabling Spiking Representation of Stiffness and Disease Diagnosis. Adv. Mater. 2022, 34, 2201608. [Google Scholar] [CrossRef] [PubMed]
- Pan, C.; Zhai, J.; Wang, Z.L. Piezotronics and Piezo-phototronics of Third Generation Semiconductor Nanowires. Chem. Rev. 2019, 119, 9303–9359. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Wang, J.; Ji, K.; Jiang, B.; Cui, X.; Sha, W.; Wang, B.; Dai, X.; Hua, Q.; Wan, L.; et al. Flexible, stretchable, and transparent InGaN/GaN multiple quantum wells/polyacrylamide hydrogel-based light emitting diodes. Nano Res. 2022, 15, 5492–5499. [Google Scholar] [CrossRef]
- Ji, K.; Cui, X.; Chen, J.; Guo, Q.; Jiang, B.; Wang, B.; Sun, W.; Hu, W.; Hua, Q. Effect of backside dry etching on the device performance of AlGaN/GaN HEMTs. Nanotechnology 2021, 32, 355203. [Google Scholar] [CrossRef] [PubMed]
- Hua, Q.; Cui, X.; Liu, H.; Pan, C.; Hu, W.; Wang, Z.L. Piezotronic Synapse Based on a Single GaN Microwire for Artificial Sensory Systems. Nano Lett. 2020, 20, 3761–3768. [Google Scholar] [CrossRef]
- Chen, Y.; Gao, G.; Zhao, J.; Zhang, H.; Yu, J.; Yang, X.; Zhang, Q.; Zhang, W.; Xu, S.; Sun, J.; et al. Piezotronic Graphene Artificial Sensory Synapse. Adv. Funct. Mater. 2019, 29, 1900959. [Google Scholar] [CrossRef]
- Hua, Q.; Sun, J.; Liu, H.; Cui, X.; Ji, K.; Guo, W.; Pan, C.; Hu, W.; Wang, Z.L. Flexible GaN microwire-based piezotronic sensory memory device. Nano Energy 2020, 78, 105312. [Google Scholar] [CrossRef]
- Zhang, S.; Ma, B.; Zhou, X.; Hua, Q.; Gong, J.; Liu, T.; Cui, X.; Zhu, J.; Guo, W.; Jing, L.; et al. Strain-controlled power devices as inspired by human reflex. Nat. Commun. 2020, 11, 326. [Google Scholar] [CrossRef]
- Rao, L.; Wang, P.; Qian, Y.; Zhou, G.; Nötzel, R. Comparison of the Extended Gate Field-Effect Transistor with Direct Potentiometric Sensing for Super-Nernstian InN/InGaN Quantum Dots. ACS Omega 2020, 5, 32800–32805. [Google Scholar] [CrossRef] [PubMed]
- Si, H.; Huang, G.; Liao, J.; Fisher, A.C.; Lin, S. Light-Activated Interface Charge-Alternating Interaction on an Extended Gate Photoelectrode: A New Sensing Strategy for EGFET-Based Photoelectrochemical Sensors. ACS Appl. Mater. Interfaces 2023, 15, 11866–11874. [Google Scholar] [CrossRef] [PubMed]
- Raffel, Y.; De, S.; Lederer, M.; Olivo, R.R.; Hoffmann, R.; Thunder, S.; Pirro, L.; Beyer, S.; Chohan, T.; Kämpfe, T.; et al. Synergistic Approach of Interfacial Layer Engineering and READ-Voltage Optimization in HfO2-Based FeFETs for In-Memory-Computing Applications. ACS Appl. Electron. Mater. 2022, 4, 5292–5300. [Google Scholar] [CrossRef] [PubMed]
- Tsai, S.-H.; Fang, Z.; Wang, X.; Chand, U.; Chen, C.-K.; Hooda, S.; Sivan, M.; Pan, J.; Zamburg, E.; Thean, A.V.-Y. Stress-Memorized HZO for High-Performance Ferroelectric Field-Effect Memtransistor. ACS Appl. Electron. Mater. 2022, 4, 1642–1650. [Google Scholar] [CrossRef]
- Valiyaneerilakkal, U.; Cherumannil Karumuthil, S.; Singh, K.; Bhanuprakash, L.; Komaragiri, R.; Varghese, S. High-performance P(VDF-TrFE)/BaTiO3 nanocomposite based ferroelectric field effect transistor (FeFET) for memory and switching applications. Nano Sel. 2021, 2, 2400–2406. [Google Scholar] [CrossRef]
- Migliato Marega, G.; Wang, Z.; Paliy, M.; Giusi, G.; Strangio, S.; Castiglione, F.; Callegari, C.; Tripathi, M.; Radenovic, A.; Iannaccone, G.; et al. Low-Power Artificial Neural Network Perceptron Based on Monolayer MoS2. ACS Nano 2022, 16, 3684–3694. [Google Scholar] [CrossRef]
- Liu, X.; Sun, B.; Li, X.; Zhang, Z.; Wang, W.; Zhang, X.G.; Huang, Z.; Liu, H.; Chang, H.; Jia, R.; et al. Floating Gate Carbon Nanotube Dual-Gate Field-Effect Transistor for Reconfigurable AND/OR Logic Gates. ACS Appl. Electron. Mater. 2022, 4, 1684–1691. [Google Scholar] [CrossRef]
- Sheng, Z.; Dong, J.; Hu, W.; Wang, Y.; Sun, H.; Zhang, D.W.; Zhou, P.; Zhang, Z. Reconfigurable Logic-in-Memory Computing Based on a Polarity-Controllable Two-Dimensional Transistor. Nano Lett. 2023, 23, 5242–5249. [Google Scholar] [CrossRef]
- Wang, H.; Bao, L.; Guzman, R.; Wu, K.; Wang, A.; Liu, L.; Wu, L.; Chen, J.; Huan, Q.; Zhou, W.; et al. Ultrafast-Programmable 2D Homojunctions Based on van der Waals Heterostructures on a Silicon Substrate. Adv. Mater. 2023, 35, 2301067. [Google Scholar] [CrossRef]
- Dong, Z.; Hua, Q.; Xi, J.; Shi, Y.; Huang, T.; Dai, X.; Niu, J.; Wang, B.; Wang, Z.L.; Hu, W. Ultrafast and Low-Power 2D Bi2O2Se Memristors for Neuromorphic Computing Applications. Nano Lett. 2023, 23, 3842–3850. [Google Scholar] [CrossRef] [PubMed]
- Pacchioni, G. A stretchable transistor for neuromorphic devices. Nat. Rev. Mater. 2022, 7, 847. [Google Scholar] [CrossRef]
- Yu, J.; Gao, G.; Huang, J.; Yang, X.; Han, J.; Zhang, H.; Chen, Y.; Zhao, C.; Sun, Q.; Wang, Z.L. Contact-electrification-activated artificial afferents at femtojoule energy. Nat. Commun. 2021, 12, 1581. [Google Scholar] [CrossRef] [PubMed]
- Tee, B.C.-K.; Chortos, A.; Berndt, A.; Nguyen, A.K.; Tom, A.; McGuire, A.; Lin, Z.C.; Tien, K.; Bae, W.-G.; Wang, H.; et al. A skin-inspired organic digital mechanoreceptor. Science 2015, 350, 313–316. [Google Scholar] [CrossRef] [PubMed]
- Park, Y.J.; Sharma, B.K.; Shinde, S.M.; Kim, M.-S.; Jang, B.; Kim, J.-H.; Ahn, J.-H. All MoS2-Based Large Area, Skin-Attachable Active-Matrix Tactile Sensor. ACS Nano 2019, 13, 3023–3030. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Luo, H.; Qin, L.; Wang, X.; Xiong, Z.; Ding, H.; Gu, Y.; Liu, Z.; Zhang, T. Flexible Capacitive Tactile Sensor Based on Micropatterned Dielectric Layer. Small 2016, 12, 5042–5048. [Google Scholar] [CrossRef] [PubMed]
- Zhao, G.; Zhang, X.; Cui, X.; Wang, S.; Liu, Z.; Deng, L.; Qi, A.; Qiao, X.; Li, L.; Pan, C.; et al. Piezoelectric Polyacrylonitrile Nanofiber Film-Based Dual-Function Self-Powered Flexible Sensor. ACS Appl. Mater. Interfaces 2018, 10, 15855–15863. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Jin, L.; Zhang, P.; Zhang, B.; Li, Y.; Xie, S.; Li, X. Nanofibrous Grids Assembled Orthogonally from Direct-Written Piezoelectric Fibers as Self-Powered Tactile Sensors. ACS Appl. Mater. Interfaces 2021, 13, 10623–10631. [Google Scholar] [CrossRef] [PubMed]
- Jiang, J.; Tu, S.; Fu, R.; Li, J.; Hu, F.; Yan, B.; Gu, Y.; Chen, S. Flexible Piezoelectric Pressure Tactile Sensor Based on Electrospun BaTiO3/Poly(vinylidene fluoride) Nanocomposite Membrane. ACS Appl. Mater. Interfaces 2020, 12, 33989–33998. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Y.; Liu, Q.; Zhu, Y.; Wang, H.; Xie, Z.; Yu, X.; Zi, Y. A metal-electrode-free, fully integrated, soft triboelectric sensor array for self-powered tactile sensing. Microsyst. Nanoeng. 2020, 6, 59. [Google Scholar] [CrossRef]
- Tao, K.; Chen, Z.; Yu, J.; Zeng, H.; Wu, J.; Wu, Z.; Jia, Q.; Li, P.; Fu, Y.; Chang, H.; et al. Ultra-Sensitive, Deformable, and Transparent Triboelectric Tactile Sensor Based on Micro-Pyramid Patterned Ionic Hydrogel for Interactive Human–Machine Interfaces. Adv. Sci. 2022, 9, 2104168. [Google Scholar] [CrossRef]
- Baldini, G.; Albini, A.; Maiolino, P.; Cannata, G. An Atlas for the Inkjet Printing of Large-Area Tactile Sensors. Sensors 2022, 22, 2332. [Google Scholar] [CrossRef]
- Olowo, O.O.; Harris, B.; Sills, D.; Zhang, R.; Sherehiy, A.; Tofangchi, A.; Wei, D.; Popa, D.O. Design, Fabrication, and Characterization of Inkjet-Printed Organic Piezoresistive Tactile Sensor on Flexible Substrate. Sensors 2023, 23, 8280. [Google Scholar] [CrossRef] [PubMed]
- Salim, A.; Lim, S. Review of Recent Inkjet-Printed Capacitive Tactile Sensors. Sensors 2017, 17, 2593. [Google Scholar] [CrossRef] [PubMed]
- Fu, S.; Tao, J.; Wu, W.; Sun, J.; Li, F.; Li, J.; Huo, Z.; Xia, Z.; Bao, R.; Pan, C. Fabrication of Large-Area Bimodal Sensors by All-Inkjet-Printing. Adv. Mater. Technol. 2019, 4, 1800703. [Google Scholar] [CrossRef]
- Gai, C.; Li, D.; Zhang, X.; Zhang, H.; Li, N.; Zheng, X.; Wu, D.; Sun, J. Scalable Fabrication of Flexible Single-Layer Strain and Double-Layer Pressure Sensors by Inkjet Printing for Subtle Vibration Detection. Adv. Mater. Interfaces 2021, 8, 2100632. [Google Scholar] [CrossRef]
- Wang, H.; Yang, H.; Zhang, S.; Zhang, L.; Li, J.; Zeng, X. 3D-Printed Flexible Tactile Sensor Mimicking the Texture and Sensitivity of Human Skin. Adv. Mater. Technol. 2019, 4, 1900147. [Google Scholar] [CrossRef]
- Wang, H.; Cen, Y.; Zeng, X. Highly Sensitive Flexible Tactile Sensor Mimicking the Microstructure Perception Behavior of Human Skin. ACS Appl. Mater. Interfaces 2021, 13, 28538–28545. [Google Scholar] [CrossRef] [PubMed]
- Sang, S.; Pei, Z.; Zhang, F.; Ji, C.; Li, Q.; Ji, J.; Yang, K.; Zhang, Q. Three-Dimensional Printed Bimodal Electronic Skin with High Resolution and Breathability for Hair Growth. ACS Appl. Mater. Interfaces 2022, 14, 31493–31501. [Google Scholar] [CrossRef]
- Davoodi, E.; Montazerian, H.; Haghniaz, R.; Rashidi, A.; Ahadian, S.; Sheikhi, A.; Chen, J.; Khademhosseini, A.; Milani, A.S.; Hoorfar, M.; et al. 3D-Printed Ultra-Robust Surface-Doped Porous Silicone Sensors for Wearable Biomonitoring. ACS Nano 2020, 14, 1520–1532. [Google Scholar] [CrossRef]
- Peng, S.; Guo, Q.; Thirunavukkarasu, N.; Zheng, Y.; Wang, Z.; Zheng, L.; Wu, L.; Weng, Z. Tailoring of photocurable ionogel toward high resilience and low hysteresis 3D printed versatile porous flexible sensor. Chem. Eng. J. 2022, 439, 135593. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, L.; Wang, W.; Zhao, N.; He, P.; Liu, J.; Yang, B. Flexible Pressure Sensors with Combined Spraying and Self-Diffusion of Carbon Nanotubes. ACS Appl. Mater. Interfaces 2022, 14, 38409–38420. [Google Scholar] [CrossRef]
- Zhu, Z.; Ng, D.W.H.; Park, H.S.; McAlpine, M.C. 3D-printed multifunctional materials enabled by artificial-intelligence-assisted fabrication technologies. Nat. Rev. Mater. 2021, 6, 27–47. [Google Scholar] [CrossRef]
- Xu, K.; Tang, Y. Review: Progress on 3D printing technology in the preparation of flexible tactile sensors. J. Mater. Sci. 2023, 58, 16869–16890. [Google Scholar] [CrossRef]
- Rocha, V.G.; Saiz, E.; Tirichenko, I.S.; García-Tuñón, E. Direct ink writing advances in multi-material structures for a sustainable future. J. Mater. Chem. A 2020, 8, 15646–15657. [Google Scholar] [CrossRef]
- Rajan, K.; Samykano, M.; Kadirgama, K.; Harun, W.S.W.; Rahman, M.M. Fused deposition modeling: Process, materials, parameters, properties, and applications. Int. J. Adv. Manuf. Technol. 2022, 120, 1531–1570. [Google Scholar] [CrossRef]
- de León, A.S.; Núñez-Gálvez, F.; Moreno-Sánchez, D.; Fernández-Delgado, N.; Molina, S.I. Polymer Composites with Cork Particles Functionalized by Surface Polymerization for Fused Deposition Modeling. ACS Appl. Polym. Mater. 2022, 4, 1225–1233. [Google Scholar] [CrossRef] [PubMed]
- Giubilini, A.; Siqueira, G.; Clemens, F.J.; Sciancalepore, C.; Messori, M.; Nyström, G.; Bondioli, F. 3D-Printing Nanocellulose-Poly(3-hydroxybutyrate-co-3-hydroxyhexanoate) Biodegradable Composites by Fused Deposition Modeling. ACS Sustain. Chem. Eng. 2020, 8, 10292–10302. [Google Scholar] [CrossRef]
- High-Efficiency High-Resolution Multimaterial Fabrication for Digital Light Processing-Based Three-Dimensional Printing. 3d Print. Addit. Manuf. 2018, 5, 185–193. [CrossRef]
- Wallin, T.J.; Pikul, J.; Shepherd, R.F. 3D printing of soft robotic systems. Nat. Rev. Mater. 2018, 3, 84–100. [Google Scholar] [CrossRef]
- Gong, H.; Beauchamp, M.; Perry, S.; Woolley, A.T.; Nordin, G.P. Optical approach to resin formulation for 3D printed microfluidics. RSC Adv. 2015, 5, 106621–106632. [Google Scholar] [CrossRef]
- Kwak, H.; Shin, S.; Lee, H.; Hyun, J. Formation of a keratin layer with silk fibroin-polyethylene glycol composite hydrogel fabricated by digital light processing 3D printing. J. Ind. Eng. Chem. 2019, 72, 232–240. [Google Scholar] [CrossRef]
- Chen, S.; Liu, H.; Liu, S.; Wang, P.; Zeng, S.; Sun, L.; Liu, L. Transparent and Waterproof Ionic Liquid-Based Fibers for Highly Durable Multifunctional Sensors and Strain-Insensitive Stretchable Conductors. ACS Appl. Mater. Interfaces 2018, 10, 4305–4314. [Google Scholar] [CrossRef]
- Osman, A.; Lu, J. 3D printing of polymer composites to fabricate wearable sensors: A comprehensive review. Mater. Sci. Eng. R Rep. 2023, 154, 100734. [Google Scholar] [CrossRef]
- Pilch, M.; Topa-Skwarczyńska, M.; Chachaj-Brekiesz, A.; Jamróz, P.; Kiesiewicz, D.; Noworyta, M.; Ortyl, J. Luminescence labeled surfaces mapping system dedicated for use in quality control of 3D prints produced by stereolithography 3D printing (SLA) and laser engraving. Sens. Actuators A Phys. 2024, 365, 114828. [Google Scholar] [CrossRef]
- Gu, J.-W.; Lee, J.-H.; Kang, S.-K. 3D Electronic Sensors for Bio-Interfaced Electronics and Soft Robotics. Adv. Sens. Res. 2023, 2, 2300013. [Google Scholar] [CrossRef]
- Dong, K.; Chu, Y.; Tian, X.; Fang, T.; Ye, X.; Wang, X.; Tang, F. Wearable Photoelectric Fingertip Force Sensing System Based on Blood Volume Changes without Sensory Interference. ACS Appl. Mater. Interfaces 2023, 15, 34578–34587. [Google Scholar] [CrossRef]
- Salvo, P.; Raedt, R.; Carrette, E.; Schaubroeck, D.; Vanfleteren, J.; Cardon, L. A 3D printed dry electrode for ECG/EEG recording. Sens. Actuators A Phys. 2012, 174, 96–102. [Google Scholar] [CrossRef]
- Park, J.; Kim, J.-K.; Kim, D.-S.; Shanmugasundaram, A.; Park, S.A.; Kang, S.; Kim, S.-H.; Jeong, M.H.; Lee, D.-W. Wireless pressure sensor integrated with a 3D printed polymer stent for smart health monitoring. Sens. Actuators B Chem. 2019, 280, 201–209. [Google Scholar] [CrossRef]
- Park, J.; Kim, J.-K.; Park, S.A.; Lee, D.-W. Biodegradable polymer material based smart stent: Wireless pressure sensor and 3D printed stent. Microelectron. Eng. 2019, 206, 1–5. [Google Scholar] [CrossRef]
- Wan, X.; Zhang, F.; Liu, Y.; Leng, J. CNT-based electro-responsive shape memory functionalized 3D printed nanocomposites for liquid sensors. Carbon 2019, 155, 77–87. [Google Scholar] [CrossRef]
- Chen, D.; Liu, Q.; Han, Z.; Zhang, J.; Song, H.; Wang, K.; Song, Z.; Wen, S.; Zhou, Y.; Yan, C.; et al. 4D Printing Strain Self-Sensing and Temperature Self-Sensing Integrated Sensor–Actuator with Bioinspired Gradient Gaps. Adv. Sci. 2020, 7, 2000584. [Google Scholar] [CrossRef]
- Fernández-Hurtado, V.; Fernández-Domínguez, A.I.; Feist, J.; García-Vidal, F.J.; Cuevas, J.C. Exploring the Limits of Super-Planckian Far-Field Radiative Heat Transfer Using 2D Materials. ACS Photonics 2018, 5, 3082–3088. [Google Scholar] [CrossRef]
- Zhu, L.; Yang, T.; Zhong, Y.; Jin, Z.; Zhang, X.; Hu, C.; Wang, Z.; Wu, Z.; Zhang, Z.; Shi, Z.; et al. Scalable and Versatile Transfer of Sensitive Two-dimensional Materials. Nano Lett. 2022, 22, 2342–2349. [Google Scholar] [CrossRef]
- Hou, Y.; Ren, X.; Fan, J.; Wang, G.; Dai, Z.; Jin, C.; Wang, W.; Zhu, Y.; Zhang, S.; Liu, L.; et al. Preparation of Twisted Bilayer Graphene via the Wetting Transfer Method. ACS Appl. Mater. Interfaces 2020, 12, 40958–40967. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Liu, Q.; Xu, D.; Zhu, Y.; Kim, S.; Cui, Y.; Zhong, L.; Liu, M. Capillary-Force-Assisted Clean-Stamp Transfer of Two-Dimensional Materials. Nano Lett. 2017, 17, 6961–6967. [Google Scholar] [CrossRef] [PubMed]
- Sharma, M.; Singh, A.; Aggarwal, P.; Singh, R. Large-Area Transfer of 2D TMDCs Assisted by a Water-Soluble Layer for Potential Device Applications. ACS Omega 2022, 7, 11731–11741. [Google Scholar] [CrossRef] [PubMed]
- Lai, Q.-T.; Zhao, X.-H.; Sun, Q.-J.; Tang, Z.; Tang, X.-G.; Roy, V.A.L. Emerging MXene-Based Flexible Tactile Sensors for Health Monitoring and Haptic Perception. Small 2023, 19, 2300283. [Google Scholar] [CrossRef] [PubMed]
- Qi, F.; Xu, L.; He, Y.; Yan, H.; Liu, H. PVDF-Based Flexible Piezoelectric Tactile Sensors: Review. Cryst. Res. Technol. 2023, 58, 2300119. [Google Scholar] [CrossRef]
- Kim, J.; Lee, Y.; Kang, M.; Hu, L.; Zhao, S.; Ahn, J.-H. 2D Materials for Skin-Mountable Electronic Devices. Adv. Mater. 2021, 33, 2005858. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Xu, S.; Zhang, C.; Yin, A.; Sun, M.; Yang, H.; Hu, C.; Liu, H. Field effect transistor-based tactile sensors: From sensor configurations to advanced applications. InfoMat 2023, 5, e12376. [Google Scholar] [CrossRef]
- Han, J.; Wang, F.; Han, S.; Deng, W.; Du, X.; Yu, H.; Gou, J.; Wang, Q.J.; Wang, J. Recent Progress in 2D Inorganic/Organic Charge Transfer Heterojunction Photodetectors. Adv. Funct. Mater. 2022, 32, 2205150. [Google Scholar] [CrossRef]
- Dong, W.; Dai, Z.; Liu, L.; Zhang, Z. Toward Clean 2D Materials and Devices: Recent Progress in Transfer and Cleaning Methods. Adv. Mater. 2023, e2303014. [Google Scholar] [CrossRef] [PubMed]
- Satterthwaite, P.F.; Zhu, W.; Jastrzebska-Perfect, P.; Tang, M.; Spector, S.O.; Gao, H.; Kitadai, H.; Lu, A.-Y.; Tan, Q.; Tang, S.-Y.; et al. Van der Waals device integration beyond the limits of van der Waals forces using adhesive matrix transfer. Nat. Electron. 2023, 7, 17–28. [Google Scholar] [CrossRef]
- Liu, G.; Tian, Z.; Yang, Z.; Xue, Z.; Zhang, M.; Hu, X.; Wang, Y.; Yang, Y.; Chu, P.K.; Mei, Y.; et al. Graphene-assisted metal transfer printing for wafer-scale integration of metal electrodes and two-dimensional materials. Nat. Electron. 2022, 5, 275–280. [Google Scholar] [CrossRef]
- Kim, H.; Liu, Y.; Lu, K.; Chang, C.S.; Sung, D.; Akl, M.; Qiao, K.; Kim, K.S.; Park, B.-I.; Zhu, M.; et al. High-throughput manufacturing of epitaxial membranes from a single wafer by 2D materials-based layer transfer process. Nat. Nanotechnol. 2023, 18, 464–470. [Google Scholar] [CrossRef]
- Liu, L.; Xu, W.; Ni, Y.; Xu, Z.; Cui, B.; Liu, J.; Wei, H.; Xu, W. Stretchable Neuromorphic Transistor That Combines Multisensing and Information Processing for Epidermal Gesture Recognition. ACS Nano 2022, 16, 2282–2291. [Google Scholar] [CrossRef]
- Wang, F.-X.; Fang, P.; Wang, M.-J.; Liu, H.-C.; Lu, W.-X.; Chen, T.; Sun, L.-N. Bioinspired Multifunctional E-skin for Robot Dynamic Tactile Real-Time Feedback Systems Using Triboelectric Sensors and Electrochromic Devices. Adv. Sens. Res. 2022, 1, 2200013. [Google Scholar] [CrossRef]
- Li, S.; Chen, X.; Li, X.; Tian, H.; Wang, C.; Nie, B.; He, J.; Shao, J. Bioinspired robot skin with mechanically gated electron channels for sliding tactile perception. Sci. Adv. 2022, 8, eade0720. [Google Scholar] [CrossRef]
- Li, G.; Liu, S.; Wang, L.; Zhu, R. Skin-inspired quadruple tactile sensors integrated on a robot hand enable object recognition. Sci. Robot. 2020, 5, eabc8134. [Google Scholar] [CrossRef] [PubMed]
- Park, K.; Yuk, H.; Yang, M.; Cho, J.; Lee, H.; Kim, J. A biomimetic elastomeric robot skin using electrical impedance and acoustic tomography for tactile sensing. Sci. Robot. 2022, 7, eabm7187. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Liu, S.; Meng, Y.; Xu, W.; Liu, S.; Jia, L.; Chen, G.; Qin, Y.; Han, M.; Li, X. Self-Powered Tactile Sensor for Gesture Recognition Using Deep Learning Algorithms. ACS Appl. Mater. Interfaces 2022, 14, 25629–25637. [Google Scholar] [CrossRef] [PubMed]
- Osborn, L.E.; Dragomir, A.; Betthauser, J.L.; Hunt, C.L.; Nguyen, H.H.; Kaliki, R.R.; Thakor, N.V. Prosthesis with neuromorphic multilayered e-dermis perceives touch and pain. Sci. Robot. 2018, 3, eaat3818. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Ren, X.; Xu, J.; Yuan, Y.; Shi, J.; Ling, H.; Yang, Y.; Tang, W.; Lu, F.; Kong, X.; et al. In-Memory Tactile Sensor with Tunable Steep-Slope Region for Low-Artifact and Real-Time Perception of Mechanical Signals. ACS Nano 2023, 17, 2134–2147. [Google Scholar] [CrossRef] [PubMed]
- Pan, D.; Hu, J.; Wang, B.; Xia, X.; Cheng, Y.; Wang, C.-H.; Lu, Y. Biomimetic Wearable Sensors: Emerging Combination of Intelligence and Electronics. Adv. Sci. 2023, 11, e2303264. [Google Scholar] [CrossRef]
- Cutrone, A.; Micera, S. Implantable Neural Interfaces and Wearable Tactile Systems for Bidirectional Neuroprosthetics Systems. Adv. Healthc. Mater. 2019, 8, 1801345. [Google Scholar] [CrossRef]
- Tchantchane, R.; Zhou, H.; Zhang, S.; Alici, G. A Review of Hand Gesture Recognition Systems Based on Noninvasive Wearable Sensors. Adv. Intell. Syst. 2023, 5, 2300207. [Google Scholar] [CrossRef]
- Ozioko, O.; Dahiya, R. Smart Tactile Gloves for Haptic Interaction, Communication, and Rehabilitation. Adv. Intell. Systems 2022, 4, 2100091. [Google Scholar] [CrossRef]
- Ji, J.; Zhao, W.; Wang, Y.; Li, Q.; Wang, G. Templated Laser-Induced-Graphene-Based Tactile Sensors Enable Wearable Health Monitoring and Texture Recognition via Deep Neural Network. ACS Nano 2023, 17, 20153–20166. [Google Scholar] [CrossRef]
- Zhu, M.; Sun, Z.; Zhang, Z.; Shi, Q.; He, T.; Liu, H.; Chen, T.; Lee, C. Haptic-feedback smart glove as a creative human-machine interface (HMI) for virtual/augmented reality applications. Sci. Adv. 2020, 6, eaaz8693. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Liu, C.; Lee, Y.J.; DelPreto, J.; Wu, K.; Foshey, M.; Rus, D.; Palacios, T.; Li, Y.; Torralba, A.; et al. Adaptive tactile interaction transfer via digitally embroidered smart gloves. Nat. Commun. 2024, 15, 868. [Google Scholar] [CrossRef] [PubMed]
- Sun, Z.; Zhu, M.; Shan, X.; Lee, C. Augmented tactile-perception and haptic-feedback rings as human-machine interfaces aiming for immersive interactions. Nat. Commun. 2022, 13, 5224. [Google Scholar] [CrossRef]
- Cai, M.; Jiao, Z.; Nie, S.; Wang, C.; Zou, J.; Song, J. A multifunctional electronic skin based on patterned metal films for tactile sensing with a broad linear response range. Sci. Adv. 2021, 7, eabl8313. [Google Scholar] [CrossRef]
- Chen, D.; Zhi, X.; Xia, Y.; Li, S.; Xi, B.; Zhao, C.; Wang, X. A Digital−Analog Bimodal Memristor Based on CsPbBr3 for Tactile Sensory Neuromorphic Computing. Small 2023, 19, 2301196. [Google Scholar] [CrossRef]
- Qu, X.; Liu, Z.; Tan, P.; Wang, C.; Liu, Y.; Feng, H.; Luo, D.; Li, Z.; Wang, Z.L. Artificial tactile perception smart finger for material identification based on triboelectric sensing. Sci. Adv. 2022, 8, eabq2521. [Google Scholar] [CrossRef]
- D’Anna, E.; Valle, G.; Mazzoni, A.; Strauss, I.; Iberite, F.; Patton, J.; Petrini, F.M.; Raspopovic, S.; Granata, G.; Di Iorio, R.; et al. A closed-loop hand prosthesis with simultaneous intraneural tactile and position feedback. Sci. Robot. 2019, 4, eaau8892. [Google Scholar] [CrossRef] [PubMed]
- Zollo, L.; Di Pino, G.; Ciancio, A.L.; Ranieri, F.; Cordella, F.; Gentile, C.; Noce, E.; Romeo, R.A.; Dellacasa Bellingegni, A.; Vadalà, G.; et al. Restoring tactile sensations via neural interfaces for real-time force-and-slippage closed-loop control of bionic hands. Sci. Robot. 2019, 4, eaau9924. [Google Scholar] [CrossRef]
- Ortiz-Catalan, M.; Zbinden, J.; Millenaar, J.; D’Accolti, D.; Controzzi, M.; Clemente, F.; Cappello, L.; Earley, E.J.; Mastinu, E.; Kolankowska, J.; et al. A highly integrated bionic hand with neural control and feedback for use in daily life. Sci. Robot. 2023, 8, eadf7360. [Google Scholar] [CrossRef]
- Zhu, B.; Wang, H.; Liu, Y.; Qi, D.; Liu, Z.; Wang, H.; Yu, J.; Sherburne, M.; Wang, Z.; Chen, X. Skin-Inspired Haptic Memory Arrays with an Electrically Reconfigurable Architecture. Adv. Mater. 2016, 28, 1559–1566. [Google Scholar] [CrossRef]
- Park, M.; Park, Y.J.; Chen, X.; Park, Y.-K.; Kim, M.-S.; Ahn, J.-H. MoS2-Based Tactile Sensor for Electronic Skin Applications. Adv. Mater. 2016, 28, 2556–2562. [Google Scholar] [CrossRef]
- Xue, J.; Zou, Y.; Deng, Y.; Li, Z. Bioinspired sensor system for health care and human-machine interaction. EcoMat 2022, 4, e12209. [Google Scholar] [CrossRef]
- Lee, K.; Ni, X.; Lee, J.Y.; Arafa, H.; Pe, D.J.; Xu, S.; Avila, R.; Irie, M.; Lee, J.H.; Easterlin, R.L.; et al. Mechano-acoustic sensing of physiological processes and body motions via a soft wireless device placed at the suprasternal notch. Nat. Biomed. Eng. 2020, 4, 148–158. [Google Scholar] [CrossRef] [PubMed]
- Oh, H.; Yi, G.-C.; Yip, M.; Dayeh, S.A. Scalable tactile sensor arrays on flexible substrates with high spatiotemporal resolution enabling slip and grip for closed-loop robotics. Sci. Adv. 2020, 6, eabd7795. [Google Scholar] [CrossRef]
- Li, F.; Wang, R.; Song, C.; Zhao, M.; Ren, H.; Wang, S.; Liang, K.; Li, D.; Ma, X.; Zhu, B.; et al. A Skin-Inspired Artificial Mechanoreceptor for Tactile Enhancement and Integration. ACS Nano 2021, 15, 16422–16431. [Google Scholar] [CrossRef]
- Wang, T.; Wang, M.; Wang, J.; Yang, L.; Ren, X.; Song, G.; Chen, S.; Yuan, Y.; Liu, R.; Pan, L.; et al. A chemically mediated artificial neuron. Nat. Electron. 2022, 5, 586–595. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, D.; Zhang, Y.; Fan, L.; Ren, Q.; Ma, S.; Zhang, M. Stretchable Temperature-Responsive Multimodal Neuromorphic Electronic Skin with Spontaneous Synaptic Plasticity Recovery. ACS Nano 2022, 16, 8283–8293. [Google Scholar] [CrossRef]
- Gerald, A.; Batliwala, R.; Ye, J.; Hsu, P.; Aihara, H.; Russo, S. A Soft Robotic Haptic Feedback Glove for Colonoscopy Procedures. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 583–590. [Google Scholar]
- Sandamirskaya, Y. Rethinking computing hardware for robots. Sci. Robot. 2022, 7, eabq3909. [Google Scholar] [CrossRef]
- Liu, F.; Deswal, S.; Christou, A.; Sandamirskaya, Y.; Kaboli, M.; Dahiya, R. Neuro-inspired electronic skin for robots. Sci. Robot. 2022, 7, eabl7344. [Google Scholar] [CrossRef] [PubMed]
- Sahu, M.C.; Jena, A.K.; Mallik, S.K.; Roy, S.; Sahoo, S.; Ajimsha, R.S.; Misra, P.; Sahoo, S. Reconfigurable Low-Power TiO2 Memristor for Integration of Artificial Synapse and Nociceptor. ACS Appl. Mater. Interfaces 2023, 15, 25713–25725. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.; Oh, J.Y.; Lee, T.-W. Neuromorphic Skin Based on Emerging Artificial Synapses. Adv. Mater. Technol. 2022, 7, 2200193. [Google Scholar] [CrossRef]
- Ma, X.; Wang, C.; Wei, R.; He, J.; Li, J.; Liu, X.; Huang, F.; Ge, S.; Tao, J.; Yuan, Z.; et al. Bimodal Tactile Sensor without Signal Fusion for User-Interactive Applications. ACS Nano 2022, 16, 2789–2797. [Google Scholar] [CrossRef] [PubMed]
- Du, L.; Hao, H.; Ding, Y.; Gabros, A.; Mier, T.C.E.; Van der Spiegel, J.; Lucas, T.H.; Aflatouni, F.; Richardson, A.G.; Allen, M.G. An implantable, wireless, battery-free system for tactile pressure sensing. Microsyst. Nanoeng. 2023, 9, 130. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Yang, L.; Deng, S.; Huang, H.; Wang, Y.; Xiong, Z.; Feng, S.; Wang, S.; Li, T.; Zhang, T. A machine learning-assisted multifunctional tactile sensor for smart prosthetics. InfoMat 2023, 5, e12463. [Google Scholar] [CrossRef]
- Xu, H.; Rong, Y.; Ren, J.; Zhang, N.; Zhao, Y.; Yang, X.; Zhu, Z.; Gu, G. A Learning-Based Sensor Array for Untethered Soft Prosthetic Hand Aiming at Restoring Tactile Sensation. Adv. Intell. Syst. 2023, 2300221. [Google Scholar] [CrossRef]
- Sun, F.; Lu, Q.; Feng, S.; Zhang, T. Flexible Artificial Sensory Systems Based on Neuromorphic Devices. ACS Nano 2021, 15, 3875–3899. [Google Scholar] [CrossRef] [PubMed]
- Pang, J.; Peng, S.; Hou, C.; Zhao, H.; Fan, Y.; Ye, C.; Zhang, N.; Wang, T.; Cao, Y.; Zhou, W.; et al. Applications of Graphene in Five Senses, Nervous System, and Artificial Muscles. ACS Sens. 2023, 8, 482–514. [Google Scholar] [CrossRef]
- Ma, H.; Jiang, Q.; Ma, X.; Chen, R.; Hua, K.; Yang, X.; Ge, J.; Ji, J.; Xue, M. Coaxial Graphene/MXene Microfibers with Interfacial Buffer-Based Lightweight Distance Sensors Assisting Lossless Grasping of Fragile and Deformable Objects. Langmuir 2023, 39, 4530–4536. [Google Scholar] [CrossRef]
- Yang, X.; Cao, L.; Wang, J.; Chen, L. Sandwich-like Polypyrrole/Reduced Graphene Oxide Nanosheets Integrated Gelatin Hydrogel as Mechanically and Thermally Sensitive Skinlike Bioelectronics. ACS Sustain. Chem. Eng. 2020, 8, 10726–10739. [Google Scholar] [CrossRef]
- Kireev, D.; Liu, S.; Jin, H.; Patrick Xiao, T.; Bennett, C.H.; Akinwande, D.; Incorvia, J.A.C. Metaplastic and energy-efficient biocompatible graphene artificial synaptic transistors for enhanced accuracy neuromorphic computing. Nat. Commun. 2022, 13, 4386. [Google Scholar] [CrossRef]
- Ali, M.A.; Hu, C.; Yuan, B.; Jahan, S.; Saleh, M.S.; Guo, Z.; Gellman, A.J.; Panat, R. Breaking the barrier to biomolecule limit-of-detection via 3D printed multi-length-scale graphene-coated electrodes. Nat. Commun. 2021, 12, 7077. [Google Scholar] [CrossRef]
- Qiao, Y.; Hirtz, T.; Wu, F.; Deng, G.; Li, X.; Zhi, Y.; Tian, H.; Yang, Y.; Ren, T.-L. Fabricating Molybdenum Disulfide Memristors. ACS Appl. Electron. Mater. 2020, 2, 346–370. [Google Scholar] [CrossRef]
- Pham, P.V.; Bodepudi, S.C.; Shehzad, K.; Liu, Y.; Xu, Y.; Yu, B.; Duan, X. 2D Heterostructures for Ubiquitous Electronics and Optoelectronics: Principles, Opportunities, and Challenges. Chem. Rev. 2022, 122, 6514–6613. [Google Scholar] [CrossRef]
- Cao, G.; Meng, P.; Chen, J.; Liu, H.; Bian, R.; Zhu, C.; Liu, F.; Liu, Z. 2D Material Based Synaptic Devices for Neuromorphic Computing. Adv. Funct. Mater. 2021, 31, 2005443. [Google Scholar] [CrossRef]
- Sun, Y.; Ding, Y.; Xie, D. Mixed-Dimensional Van der Waals Heterostructures Enabled Optoelectronic Synaptic Devices for Neuromorphic Applications. Adv. Funct. Mater. 2021, 31, 2105625. [Google Scholar] [CrossRef]
- Yan, Y.; Yu, N.; Yu, Z.; Su, Y.; Chen, J.; Xiang, T.; Han, Y.; Wang, J. Optoelectronic Synaptic Memtransistor Based on 2D SnSe/MoS2 van der Waals Heterostructure under UV–Ozone Treatment. Small Methods 2023, 7, 2201679. [Google Scholar] [CrossRef]
- Jiang, J.; Xu, W.; Sun, Z.; Fu, L.; Zhang, S.; Qin, B.; Fan, T.; Li, G.; Chen, S.; Yang, S.; et al. Wavelength-Controlled Photoconductance Polarity Switching via Harnessing Defects in Doped PdSe2 for Artificial Synaptic Features. Small 2023, 2306068. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, T.; Tahir, M.; Low, M.X.; Ren, Y.; Tawfik, S.A.; Mayes, E.L.H.; Kuriakose, S.; Nawaz, S.; Spencer, M.J.S.; Chen, H.; et al. Fully Light-Controlled Memory and Neuromorphic Computation in Layered Black Phosphorus. Adv. Mater. 2021, 33, 2004207. [Google Scholar] [CrossRef] [PubMed]
- Kumar, D.; Li, H.; Das, U.K.; Syed, A.M.; El-Atab, N. Flexible Solution-Processable Black-Phosphorus-Based Optoelectronic Memristive Synapses for Neuromorphic Computing and Artificial Visual Perception Applications. Adv. Mater. 2023, 35, 2300446. [Google Scholar] [CrossRef] [PubMed]
- Tan, W.C.; Wang, L.; Feng, X.; Chen, L.; Huang, L.; Huang, X.; Ang, K.-W. Recent Advances in Black Phosphorus-Based Electronic Devices. Adv. Electron. Mater. 2019, 5, 1800666. [Google Scholar] [CrossRef]
- Ahmed, T.; Kuriakose, S.; Mayes, E.L.H.; Ramanathan, R.; Bansal, V.; Bhaskaran, M.; Sriram, S.; Walia, S. Optically Stimulated Artificial Synapse Based on Layered Black Phosphorus. Small 2019, 15, 1900966. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Hong, W.; Liu, L.; Wang, D.; Xiang, L.; Mai, Z.; Tang, G.; Shao, S.; Jin, C.; Hong, Q.; et al. Highly Sensitive and Wide-Range Flexible Bionic Tactile Sensors Inspired by the Octopus Sucker Structure. ACS Appl. Nano Mater. 2022, 5, 11028–11036. [Google Scholar] [CrossRef]
- Hsieh, G.-W.; Chien, C.-Y. Wearable Capacitive Tactile Sensor Based on Porous Dielectric Composite of Polyurethane and Silver Nanowire. Polymers 2023, 15, 3816. [Google Scholar] [CrossRef] [PubMed]
- Niu, H.; Chen, Y.; Kim, E.-S.; Zhou, W.; Li, Y.; Kim, N.-Y. Ultrasensitive capacitive tactile sensor with heterostructured active layers for tiny signal perception. Chem. Eng. J. 2022, 450, 138258. [Google Scholar] [CrossRef]
- Sun, F.; Lu, Q.; Hao, M.; Wu, Y.; Li, Y.; Liu, L.; Li, L.; Wang, Y.; Zhang, T. An artificial neuromorphic somatosensory system with spatio-temporal tactile perception and feedback functions. Npj Flex. Electron. 2022, 6, 72. [Google Scholar] [CrossRef]










| Sensor Types | Sensor Features | Sensitivity | Sensing Range | Applications | Ref. |
|---|---|---|---|---|---|
| Resistive tactile sensors | Multi-walled carbon nanotubes | ~385 kPa−1 | >1400 kPa | smart robotics | [54] |
| Resistive tactile sensors | CNT/Au electrode with a pyramid-structure resistive channel | / | 1~80 kPa | neurorobotics and neuro-prosthetics | [56,85] |
| Resistive tactile sensors | Al2O3/MoS2/Al2O3 sandwich structure | 0.011 kPa−1 | 1~120 kPa | wearable electronics, e-skin, bio-robotics | [86] |
| Capacitive tactile sensors | AgNF-AgNW hybrid electrode | 1.78 × 10−3 kPa−1 | <350 kPa | mobile smart devices | [35] |
| Capacitive tactile sensors | Graphene/CNT/Silicone rubber composite | 0.63 kPa−1 | 0.1~0.26 MPa | robotic prostheses | [44] |
| Capacitive tactile sensors | Au/ polystyrene (PS)/Au layer with micropatterned PDMS | 0.815 kPa−1 | 0~50 N | electronic skins, wearable robotics, and biomedical devices | [87] |
| Capacitive tactile sensors | PDMS/microconformal graphene (MGr) structure with PET substrate | 3.19 kPa−1 | 0~4 kPa | wearable health-monitoring devices, robot tactile systems and human-machine interface systems | [59] |
| Piezoelectric tactile sensors | Polyacrylonitrile/barium titanate (PAN-C/BTO) nanofiber film | 1.44 V·N−1 | 0.15~25 N | human-computer interactive and smart wearable sensing systems | [88] |
| Piezoelectric tactile sensors | PVDF nanofibers based on polyurethane (PU) film and PDMS plate | 7.1 mV·kPa−1 | <10 kPa | electronic skin, robotics, and interface of artificial intelligence | [89] |
| Piezoelectric tactile sensors | PVDF/BaTiO3 nanocomposites | 18 V·N−1 | 1~20 g | human–machine interfaces | [90] |
| Triboelectric tactile sensors | Ecoflex electrification layer with polyvinyl alcohol/polyethyleneimine (PVA/PEI) electrode layer | 0.063 V·kPa−1 | 5~50 kPa | self-powered touch screens, human–machine interfaces | [91] |
| Triboelectric tactile sensors | Micro-pyramid-patterned double-network ionic Organohydrogels | 45.97 mV·kPa−1 | 0.02~4 kPa | wearable devices and robotics | [92] |
| Triboelectric tactile sensors | Carbonyl Iron powder (CIP)/NdFeB/PDMS Magnetic Composite and CNT/PDMS Mixture | 0.314 kPa−1 | >1000 kPa | healthcare monitoring | [37] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, J.; Yang, H.; Li, X.; Wei, R.; Zhang, T.; Dong, L.; Yang, Z.; Yuan, Z.; Sun, J.; Hua, Q. Recent Advances in Tactile Sensory Systems: Mechanisms, Fabrication, and Applications. Nanomaterials 2024, 14, 465. https://doi.org/10.3390/nano14050465
Xi J, Yang H, Li X, Wei R, Zhang T, Dong L, Yang Z, Yuan Z, Sun J, Hua Q. Recent Advances in Tactile Sensory Systems: Mechanisms, Fabrication, and Applications. Nanomaterials. 2024; 14(5):465. https://doi.org/10.3390/nano14050465
Chicago/Turabian StyleXi, Jianguo, Huaiwen Yang, Xinyu Li, Ruilai Wei, Taiping Zhang, Lin Dong, Zhenjun Yang, Zuqing Yuan, Junlu Sun, and Qilin Hua. 2024. "Recent Advances in Tactile Sensory Systems: Mechanisms, Fabrication, and Applications" Nanomaterials 14, no. 5: 465. https://doi.org/10.3390/nano14050465