
Data-Driven Anisotropic Biomembrane Simulation Based on the Laplace Stretch

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
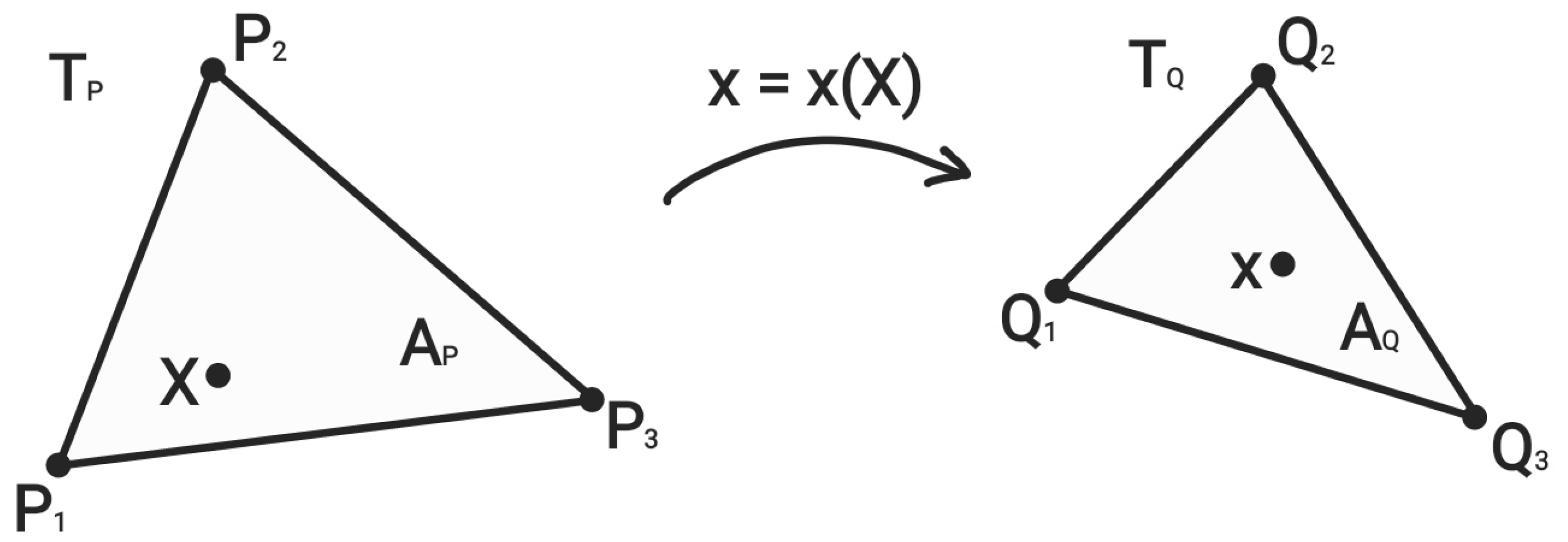
2.1. Equilibrium Equations and Finite Element Discretization
2.2. Our Approach to Data-Driven Constitutive Modeling
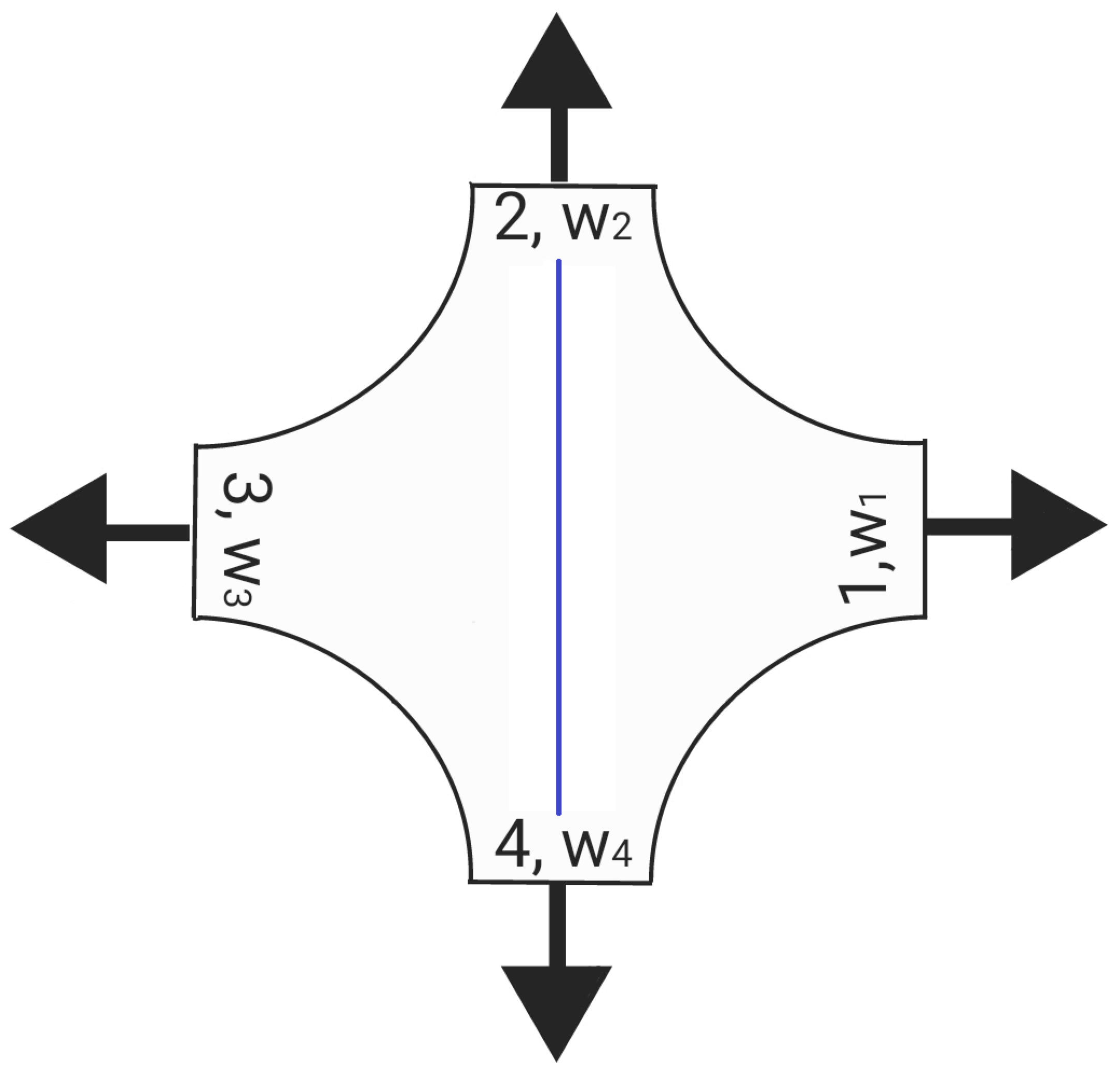
2.3. Virtual Experiments for 2D Membrane Deformation and Their Relevance for Data-Driven Constitutive Modeling
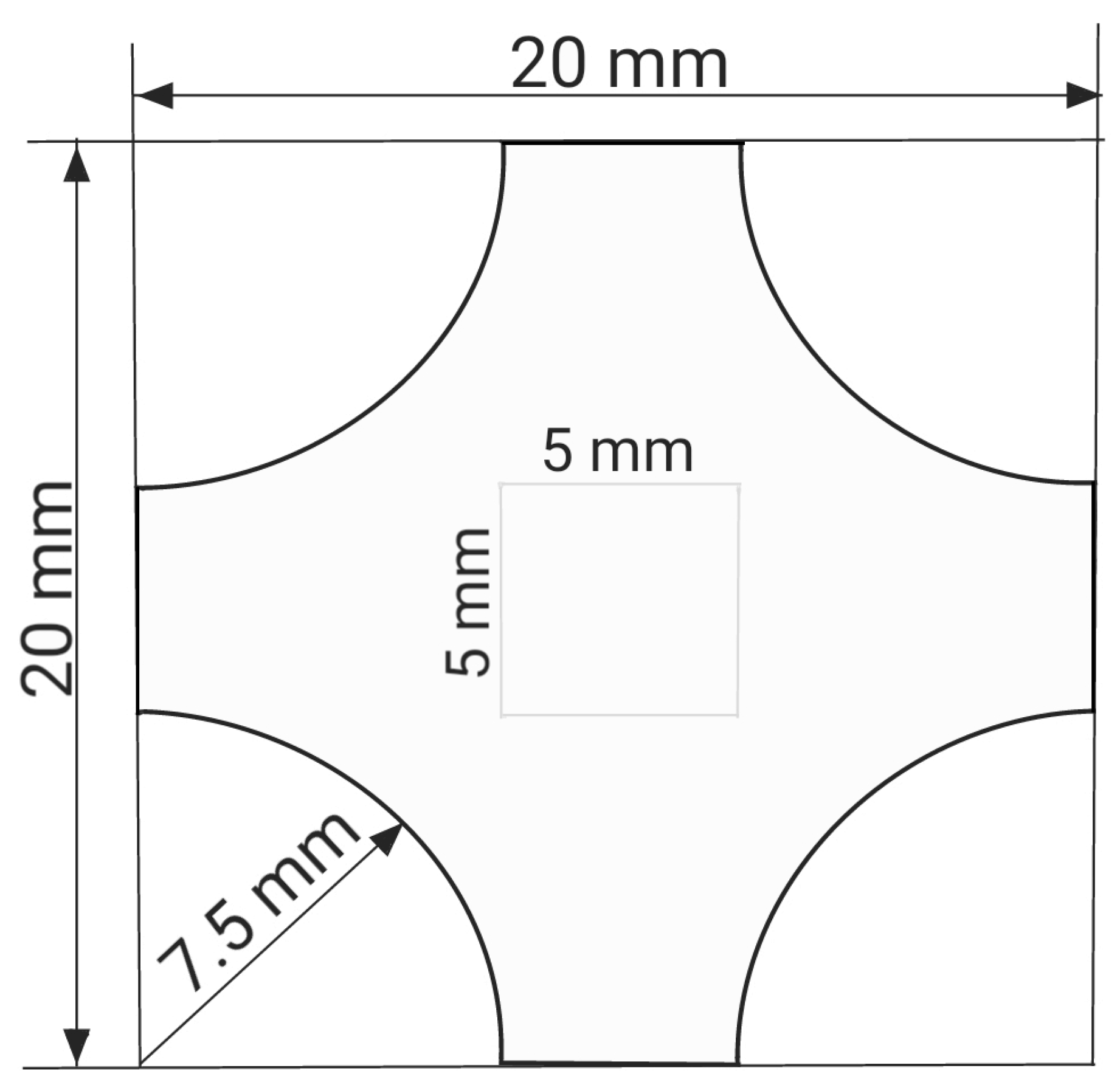
3. Data-Driven Forward Simulation of Square Patch Inflation
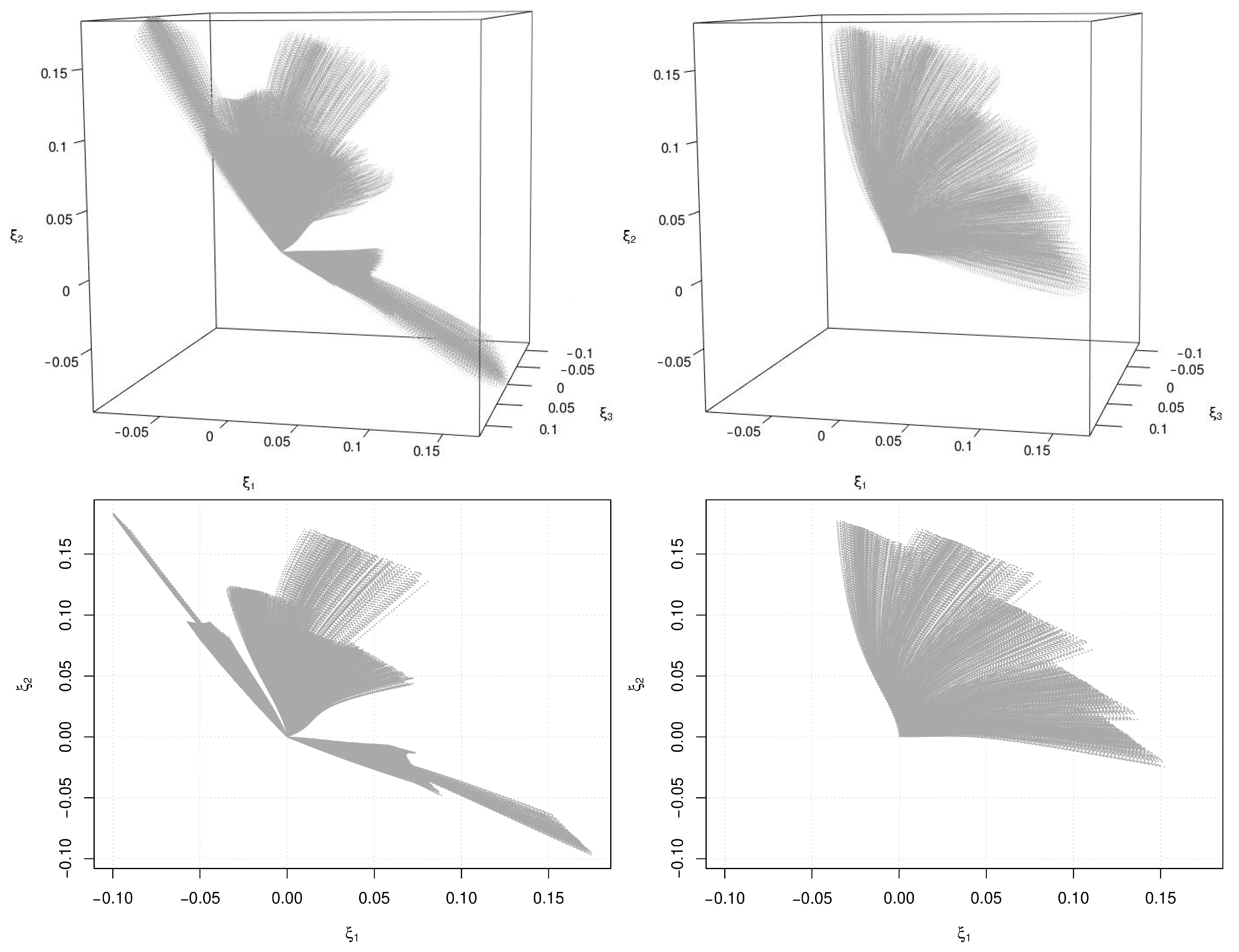
4. Results
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hauseux, P.; Hale, J.S.; Cotin, S.; Bordas, S.P. Quantifying the uncertainty in a hyperelastic soft tissue model with stochastic parameters. Appl. Math. Model. 2018, 62, 86–102. [Google Scholar] [CrossRef]
- Lee, T.; Turin, S.Y.; Gosain, A.K.; Bilionis, I.; Buganza Tepole, A. Propagation of material behavior uncertainty in a nonlinear finite element model of reconstructive surgery. Biomech. Model. Mechanobiol. 2018, 17, 1857–1873. [Google Scholar] [CrossRef] [PubMed]
- Caasenbrood, B.; Pogromsky, A.; Nijmeijer, H. Control-oriented models for hyperelastic soft robots through differential geometry of curves. Soft Robot. 2023, 10, 129–148. [Google Scholar] [CrossRef] [PubMed]
- Khaniki, H.B.; Ghayesh, M.H.; Chin, R.; Amabili, M. Hyperelastic structures: A review on the mechanics and biomechanics. Int. J. Non-Linear Mech. 2023, 148, 104275. [Google Scholar] [CrossRef]
- Marckmann, G.; Verron, E. Comparison of hyperelastic models for rubber-like materials. Rubber Chem. Technol. 2006, 79, 835–858. [Google Scholar] [CrossRef]
- Chagnon, G.; Rebouah, M.; Favier, D. Hyperelastic energy densities for soft biological tissues: A review. J. Elast. 2015, 120, 129–160. [Google Scholar] [CrossRef]
- Ciarlet, P.G. Mathematical Elasticity. Volume I: Three-Dimensional Elasticity; Publishing House: Amsterdam, The Netherlands, 1988; p. 451. [Google Scholar]
- Criscione, J.C. Rivlin’s representation formula is ill-conceived for the determination of response functions via biaxial testing. In The Rational Spirit in Modern Continuum Mechanics; Springer: Dordrecht, The Netherlands, 2004; pp. 197–215. [Google Scholar]
- Hsu, F.P.K.; Schwab, C.; Rigamonti, D.; Humphrey, J.D. Identification of response functions from axisymmetric membrane inflation tests: Implications for biomechanics. Int. J. Solids Struct. 1994, 31, 3375–3386. [Google Scholar] [CrossRef]
- Sharpe, W.N. (Ed.) Springer Handbook of Experimental Solid Mechanics; Springer Science & Business Media: New York, NY, USA, 2008; p. 1098. [Google Scholar]
- Ogden, R.W.; Saccomandi, G.; Sgura, I. Fitting hyperelastic models to experimental data. Comput. Mech. 2004, 34, 484–502. [Google Scholar] [CrossRef]
- Anssari-Benam, A.; Bucchi, A.; Saccomandi, G. On the central role of the invariant I2 in nonlinear elasticity. Int. J. Eng. Sci. 2021, 163, 103486. [Google Scholar] [CrossRef]
- Kalina, K.A.; Linden, L.; Brummund, J.; Metsch, P.; Kästner, M. Automated constitutive modeling of isotropic hyperelasticity based on artificial neural networks. Comput. Mech. 2022, 69, 213–232. [Google Scholar] [CrossRef]
- Kirchdoerfer, T.; Ortiz, M. Data-driven computational mechanics. Comput. Methods Appl. Mech. Eng. 2016, 304, 81–101. [Google Scholar] [CrossRef]
- Nguyen, L.T.K.; Keip, M.A. A data-driven approach to nonlinear elasticity. Comput. Struct. 2018, 194, 97–115. [Google Scholar] [CrossRef]
- Platzer, A.; Leygue, A.; Stainier, L.; Ortiz, M. Finite element solver for data-driven finite strain elasticity. Comput. Methods Appl. Mech. Eng. 2021, 379, 113756. [Google Scholar] [CrossRef]
- Sacks, M.S.; Motiwale, S.; Goodbrake, C.; Zhang, W. Neural network approaches for soft biological tissue and organ simulations. J. Biomech. Eng. 2022, 144, 121010. [Google Scholar] [CrossRef] [PubMed]
- Tac, V.; Sree, V.D.; Rausch, M.K.; Tepole, A.B. Data-driven modeling of the mechanical behavior of anisotropic soft biological tissue. Eng. Comput. 2022, 38, 4167–4182. [Google Scholar] [CrossRef]
- Taç, V.; Linka, K.; Sahli-Costabal, F.; Kuhl, E.; Tepole, A.B. Benchmarking physics-informed frameworks for data-driven hyperelasticity. Comput. Mech. 2024, 73, 49–65. [Google Scholar] [CrossRef]
- Linden, L.; Klein, D.K.; Kalina, K.A.; Brummund, J.; Weeger, O.; Kästner, M. Neural networks meet hyperelasticity: A guide to enforcing physics. J. Mech. Phys. Solids 2023, 179, 105363. [Google Scholar] [CrossRef]
- Fan, F.L.; Xiong, J.; Li, M.; Wang, G. On interpretability of artificial neural networks: A survey. IEEE Trans. Radiat. Plasma Med. Sci. 2021, 5, 741–760. [Google Scholar] [CrossRef]
- Zhang, Y.; Tiňo, P.; Leonardis, A.; Tang, K. A survey on neural network interpretability. IEEE Trans. Emerg. Top. Comput. Intell. 2021, 5, 726–742. [Google Scholar] [CrossRef]
- Lipton, Z.C. The mythos of model interpretability: In machine learning, the concept of interpretability is both important and slippery. Queue 2018, 16, 31–57. [Google Scholar] [CrossRef]
- Freed, A.D.; Zamani, S.; Szabó, L.; Clayton, J.D. Laplace stretch: Eulerian and Lagrangian formulations. Z. Angew. Math. Phys. 2020, 71, 157. [Google Scholar] [CrossRef]
- Srinivasa, A. On the use of the upper triangular (or QR) decomposition for developing constitutive equations for Green-elastic materials. Int. J. Eng. Sci. 2012, 60, 1–12. [Google Scholar] [CrossRef]
- Salamatova, V.Y.; Vassilevski, Y.V.; Wang, L. Finite element models of hyperelastic materials based on a new strain measure. Differ. Equ. 2018, 54, 971–978. [Google Scholar] [CrossRef]
- Salamatova, V.Y. Finite element method for 3D deformation of hyperelastic materials. Differ. Equ. 2019, 55, 990–999. [Google Scholar] [CrossRef]
- Salamatova, V.Y.; Liogky, A.A. Method of hyperelastic nodal forces for deformation of nonlinear membranes. Differ. Equ. 2020, 56, 950–958. [Google Scholar] [CrossRef]
- Salamatova, V.; Liogky, A. Interpretable data-driven modeling of hyperelastic membranes. Int. J. Numer. Methods Biomed. Eng. 2023, 39, e3757. [Google Scholar] [CrossRef]
- Gasser, T.C.; Ogden, R.W.; Holzapfel, G.A. Hyperelastic modelling of arterial layers with distributed collagen fibre orientations. J. R. Soc. Interface 2006, 3, 15–35. [Google Scholar] [CrossRef] [PubMed]
- Biaxial Stress-Strain Data on Porcine Sample P2C1 and Fitting Procedure. Available online: https://github.com/abuganza/NN_aniso_UMAT/tree/main/training_data/porcine_P2C1 (accessed on 15 December 2023).
- Pearce, D.; Nemcek, M.; Witzenburg, C. Combining Unique Planar Biaxial Testing with Full-Field Thickness and Displacement Measurement for Spatial Characterization of Soft Tissues. Curr. Protoc. 2022, 2, e493. [Google Scholar] [CrossRef]
- Delingette, H. Triangular springs for modeling nonlinear membranes. IEEE Trans. Vis. Comput. Graph. 2008, 14, 329–341. [Google Scholar] [CrossRef]
- Knoll, D.A.; Keyes, D.E. Jacobian-free Newton–Krylov methods: A survey of approaches and applications. J. Comput. Phys. 2004, 193, 357–397. [Google Scholar] [CrossRef]
- Tangelder, H.; Fabri, A. dD Spatial Searching, 5.0.2 ed.; CGAL Editorial Board: Schenectady, NY, USA, 2020; Available online: https://doc.cgal.org/5.0.2/Manual/packages.html#PkgSpatialSearchingD (accessed on 15 December 2023).
- Salamatova, V.Y.; Liogky, A.A. Hyperelastic membrane modelling based on data-driven constitutive relations. Russ. J. Numer. Anal. Math. Model. 2020, 35, 163–173. [Google Scholar] [CrossRef]
- Chaves, E.W. Notes on Continuum Mechanics; Springer: Dordrecht, The Netherlands, 2013; 700p. [Google Scholar]
- Meador, W.; Story, H.M.; Seifert, A.W.; Bersi, M.R.; Buganza, A.T.; Rausch, M.K. The Regional-Dependent Biaxial Behavior of Aging Mouse Skin: A Detailed Histomechanical Characterization, Residual Strain Analysis, and Constitutive Model. Residual Strain Analysis, and Constitutive Model. Acta Biomater. 2020, 101, 403–413. [Google Scholar] [CrossRef] [PubMed]
- Lu, J.; Zhou, X.; Raghavan, M.L. Inverse method of stress analysis for cerebral aneurysms. Biomech. Model. Mechanobiol. 2008, 7, 477–486. [Google Scholar] [CrossRef] [PubMed]
- Roohbakhshan, F.; Duong, T.X.; Sauer, R.A. A projection method to extract biological membrane models from 3D material models. J. Mech. Behav. Biomed. Mater. 2016, 58, 90–104. [Google Scholar] [CrossRef] [PubMed]
- Tepole, A.B.; Kabaria, H.; Bletzinger, K.U.; Kuhl, E. Isogeometric Kirchhoff–Love shell formulations for biological membranes. Comput. Methods Appl. Mech. Eng. 2015, 293, 328–347. [Google Scholar] [CrossRef] [PubMed]
- Pierron, F.; Grédiac, M. Towards Material Testing 2.0. A review of test design for identification of constitutive parameters from full-field measurements. Strain 2021, 57, e12370. [Google Scholar] [CrossRef]
- Fehervary, H.; Smoljkić, M.; Vander Sloten, J.; Famaey, N. Planar biaxial testing of soft biological tissue using rakes: A critical analysis of protocol and fitting process. J. Mech. Behav. Biomed. Mater. 2016, 61, 135–151. [Google Scholar] [CrossRef]
- Witzenburg, C.M.; Barocas, V.H. A nonlinear anisotropic inverse method for computational dissection of inhomogeneous planar tissues. Comput. Methods Biomech. Biomed. Eng. 2016, 19, 1630–1646. [Google Scholar] [CrossRef]
- Beatty, M.F. A class of universal relations in isotropic elasticity theory. J. Elast. 1987, 17, 113–121. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liogky, A.; Salamatova, V. Data-Driven Anisotropic Biomembrane Simulation Based on the Laplace Stretch. Computation 2024, 12, 39. https://doi.org/10.3390/computation12030039
Liogky A, Salamatova V. Data-Driven Anisotropic Biomembrane Simulation Based on the Laplace Stretch. Computation. 2024; 12(3):39. https://doi.org/10.3390/computation12030039
Chicago/Turabian StyleLiogky, Alexey, and Victoria Salamatova. 2024. "Data-Driven Anisotropic Biomembrane Simulation Based on the Laplace Stretch" Computation 12, no. 3: 39. https://doi.org/10.3390/computation12030039