
Balanced Circular Packing Problems with Distance Constraints

 , , and
, , and
Abstract
:1. Introduction
2. Dense Packing Circular Problem with Distance and Balancing Conditions
2.1. Sequential Algorithm for DCBPs
2.2. Sequential Implementation of a Parallel Algorithm for DCBP
2.3. Solving DCBP Using IPOPT
3. Sparse Balanced Packing Problem with Balancing Conditions
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Shor’s -Algorithm
References
- Bowers, P.L.; Stephenson, K. Uniformizing Dessins and BelyiMaps via Circle Packing; American Mathematical Soc.: Providence, RI, USA, 2004; Volume 170. [Google Scholar]
- Stephenson, K. Introduction to Circle Packing: The Theory of Discrete Analytic Functions; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Bowers, P.L. Introduction to Circle Packing: A Review. 2005. Available online: https://www.math.fsu.edu/~aluffi/archive/paper356.pdf (accessed on 27 March 2022).
- Hifi, M.; M’Hallah, R. A Literature Review on Circle and Sphere Packing Problems: Models and Methodologies. Adv. Oper. Res. 2009, 2009, 1–22. [Google Scholar] [CrossRef]
- Castillo, I.; Kampas, F.J.; Pintér, J.D. Solving circle packing problems by global optimization: Numerical results and industrial applications. Eur. J. Oper. Res. 2008, 191, 786–802. [Google Scholar] [CrossRef]
- Yagiura, M.; Umetani, S.; Imahori, S.; Hu, Y. Cutting and Packing Problems: From the Perspective of Combinatorial Optimization; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Zeng, Z.; Yu, X.; He, K.; Huang, W.; Fu, Z. Iterated tabu search and variable neighborhood descent for packing un-equal circles into a circular container. Eur. J. Oper. Res. 2016, 250, 615–627. [Google Scholar] [CrossRef]
- He, K.; Ye, H.; Wang, Z.; Liu, J. An efficient quasi-physical quasi-human algorithm for packing equal circles in a circular container. Comput. Oper. Res. 2018, 92, 26–36. [Google Scholar] [CrossRef] [Green Version]
- Astarkov, S. On regular covering/packing of the Euclidean plane with circles. In Proceedings of the International Conference on Geometric Analysis in Honor of the 90th Anniversary of Academician Yu. G. Reshetnyak, Novosibirsk, Russia, 22–28 September 2019; pp. 13–15. [Google Scholar]
- Huang, W.Q.; Li, Y.; Akeb, H.; Li, C.M. Greedy algorithms for packing unequal circles into a rectangular container. J. Oper. Res. Soc. 2005, 56, 539–548. [Google Scholar] [CrossRef]
- Birgin, E.; Sobral, F. Minimizing the object dimensions in circle and sphere packing problems. Comput. Oper. Res. 2008, 35, 2357–2375. [Google Scholar] [CrossRef]
- Birgin, E.G.; Gentil, J.M. New and improved results for packing identical unitary radius circles within triangles, rectangles and strips. Comput. Oper. Res. 2010, 37, 1318–1327. [Google Scholar] [CrossRef] [Green Version]
- Akeb, H.; Hifi, M. Algorithms for the circular two-dimensional open dimension problem. Int. Trans. Oper. Res. 2008, 15, 685–704. [Google Scholar] [CrossRef]
- Akeb, H.; Hifi, M.; Negre, S. An augmented beam search-based algorithm for the circular open dimension problem. Comput. Ind. Eng. 2011, 61, 373–381. [Google Scholar] [CrossRef]
- Stoyan, Y.; Yaskov, G. Packing equal circles into a circle with circular prohibited areas. Int. J. Comput. Math. 2012, 89, 1355–1369. [Google Scholar] [CrossRef]
- Zhuang, X.; Yan, L.; Chen, L. Packing equal circles in a damaged square. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015; pp. 1–6. [Google Scholar]
- Kazakov, A.L.; Lempert, A.A.E.; Nguyen, H.L. An algorithm of packing congruent circles in a multiply connect-ed set with non-euclidean metrics. Numer. Methods Program. 2016, 17, 177–188. [Google Scholar]
- López, C.O.; Beasley, J.E. Packing a fixed number of identical circles in a circular container with circular prohibited areas. Optim. Lett. 2018, 13, 1449–1468. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Mo, D.; Ye, T.; Huang, W. A coarse-to-fine quasi-physical optimization method for solving the circle pack-ing problem with equilibrium constraints. Comput. Ind. Eng. 2013, 66, 1049–1060. [Google Scholar] [CrossRef]
- Kovalenko, A.; Romanova, T.; Stetsyuk, P. Balance packing problem for 3D-objects: Mathematical model and solution methods. Cybern. Syst. Anal. 2015, 51, 556–565. [Google Scholar] [CrossRef]
- Stetsyuk, P.; Romanova, T.; Scheithauer, G. On the global minimum in a balanced circular packing problem. Optim. Lett. 2016, 10, 347–1360. [Google Scholar] [CrossRef]
- Fasano, G.; Pinter, J.D. Modeling and Optimization in Space Engineering: State of the Art and New Challenges; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Wang, Y.; Wang, Y.; Sun, J.; Huang, C.; Zhang, X. A stimulus–response-based allocation method for the circle packing problem with equilibrium constraints. Phys. A Stat. Mech. Its Appl. 2019, 522, 232–247. [Google Scholar] [CrossRef]
- Litvinchev, I.; Infante, L.; Ozuna, L. Packing circular-like objects in a rectangular container. J. Comput. Syst. Sci. Int. 2015, 54, 259–267. [Google Scholar] [CrossRef]
- Kazakov, A.L.; Lempert, A.A.; Nguyen, H.L. The Problem of the Optimal Packing of the Equal Circles for Special Non-Euclidean Metric. In International Conference on Analysis of Images, Social Networks and Texts; Springer: Cham, Switherland, 2017; pp. 58–68. [Google Scholar] [CrossRef]
- Litvinchev, I.; Ozuna, E. Approximate Packing Circles in a Rectangular Container: Valid Inequalities and Nesting. J. Appl. Res. Technol. 2014, 12, 716–723. [Google Scholar] [CrossRef]
- Pedroso, J.P.; Cunha, S.; Tavares, J.N. Recursive circle packing problems. Int. Trans. Oper. Res. 2016, 23, 355–368. [Google Scholar] [CrossRef]
- Gleixner, A.; Maher, S.J.; Müller, B.; Pedroso, J.P. Price-and-verify: A new algorithm for recursive circle packing using Dantzig–Wolfe decomposition. Ann. Oper. Res. 2018, 284, 527–555. [Google Scholar] [CrossRef] [Green Version]
- Ekanayake, D.B.; Ranpatidewage, M.M.; LaFountain, D.J. Optimal packings for filled rings of circles. Appl. Math. 2020, 65, 1–22. [Google Scholar] [CrossRef]
- Scholz, M.; Dietmeier, M. Packing and stacking rings into rectangular bins. Procedia Comput. Sci. 2022, 200, 768–777. [Google Scholar] [CrossRef]
- Miyazawa, F.K.; Wakabayashi, Y. Techniques and results on approximation algorithms for packing circles. São Paulo J. Math. Sci. 2022, 16, 585–615. [Google Scholar] [CrossRef]
- Galiev, S.I.; Lisafina, M.S. Linear models for the approximate solution of the problem of packing equal circles into a given domain. Eur. J. Oper. Res. 2013, 230, 505–514. [Google Scholar] [CrossRef]
- Torres-Escobar, R.; Marmolejo-Saucedo, J.A.; Litvinchev, I. Binary monkey algorithm for approximate packing non-congruent circles in a rectangular container. Wirel. Netw. 2020, 26, 4743–4752. [Google Scholar] [CrossRef]
- Ryu, J.; Lee, M.; Kim, D.; Kallrath, J.; Sugihara, K.; Kim, D.-S. VOROPACK-D: Real-time disk packing algorithm using Voronoi diagram. Appl. Math. Comput. 2020, 375, 125076. [Google Scholar] [CrossRef]
- He, K.; Tole, K.; Ni, F.; Yuan, Y.; Liao, L. Adaptive large neighborhood search for solving the circle bin packing problem. Comput. Oper. Res. 2020, 127, 105140. [Google Scholar] [CrossRef]
- Yuan, Y.; Tole, K.; Ni, F.; He, K.; Xiong, Z.; Liu, J. Adaptive simulated annealing with greedy search for the circle bin packing problem. Comput. Oper. Res. 2022, 144, 105826. [Google Scholar] [CrossRef]
- E. Specht. 2018. Available online: http://packomania.com (accessed on 4 April 2022).
- Romanova, T.; Pankratov, A.; Litvinchev, I.; Plankovskyy, S.; Tsegelnyk, Y.; Shypul, O. Sparsest packing of two-dimensional objects. Int. J. Prod. Res. 2020, 59, 3900–3915. [Google Scholar] [CrossRef]
- Romanova, T.; Stoyan, Y.; Pankratov, A.; Litvinchev, I.; Avramov, K.; Chernobryvko, M.; Yanchevskyi, I.; Mozgova, I.; Bennell, J. Optimal layout of ellipses and its application for additive manufacturing. Int. J. Prod. Res. 2019, 59, 560–575. [Google Scholar] [CrossRef]
- Shor, N.Z. Nondifferentiable Optimization and Polynomial Problems; Kluwer Academic: Boston, MA, USA; Dordrecht, The Netherland; London, UK, 1998; p. 412. [Google Scholar] [CrossRef]
- Stetsyuk, P.I. Shor’s r-Algorithms: Theory and practice. In Optimization Methods and Applications: In Honor of Ivan V. Sergienko’s 80th Birthday; Butenko, S., Pardalos, P.M., Shylo, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; pp. 495–520. [Google Scholar]
- Stetsyuk, P.I. Theory and Software Implementations of Shor’s r-Algorithms*. Cybern. Syst. Anal. 2017, 53, 692–703. [Google Scholar] [CrossRef]
- Shor, N.Z.; Zhurbenko, N.G.; Likhovid, A.P.; Stetsyuk, P.I. Algorithms of Nondifferentiable Optimization: Development and Application. Cybern. Syst. Anal. 2003, 39, 537–548. [Google Scholar] [CrossRef]
- Octave [Free Access Electronic Resource]. Available online: http://www.octave.org (accessed on 14 March 2022).
- Cluster SKIT. Available online: https://icybcluster.org.ua/ (accessed on 4 April 2022).
- Wächter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2005, 106, 25–57. [Google Scholar] [CrossRef]
- Romanova, T.; Stoyan, Y.; Pankratov, A.; Litvinchev, I.; Marmolejo, J.A. Decomposition Algorithm for Irregular Placement Problems. In Advances in Intelligent Systems and Computing; Intelligent Computing and Optimization ICO 2019; Vasant, P., Zelinka, I., Weber, G.W., Eds.; 2020; Volume 1072, pp. 214–221. [Google Scholar]
- Litvinchev, I.S.; Rangel, S. Localization of the optimal solution and a posteriori bounds for aggregation. Comput. Oper. Res. 1999, 26, 967–988. [Google Scholar] [CrossRef]
- Litvinchev, I. Decomposition-aggregation method for convex programming problems. Optimization 1991, 22, 47–56. [Google Scholar] [CrossRef]
- Romanova, T.E.; Stetsyuk, P.I.; Chugay, A.M.; Shekhovtsov, S.B. Parallel Computing Technologies for Solving Optimization Problems of Geometric Design. Cybern. Syst. Anal. 2019, 55, 894–904. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
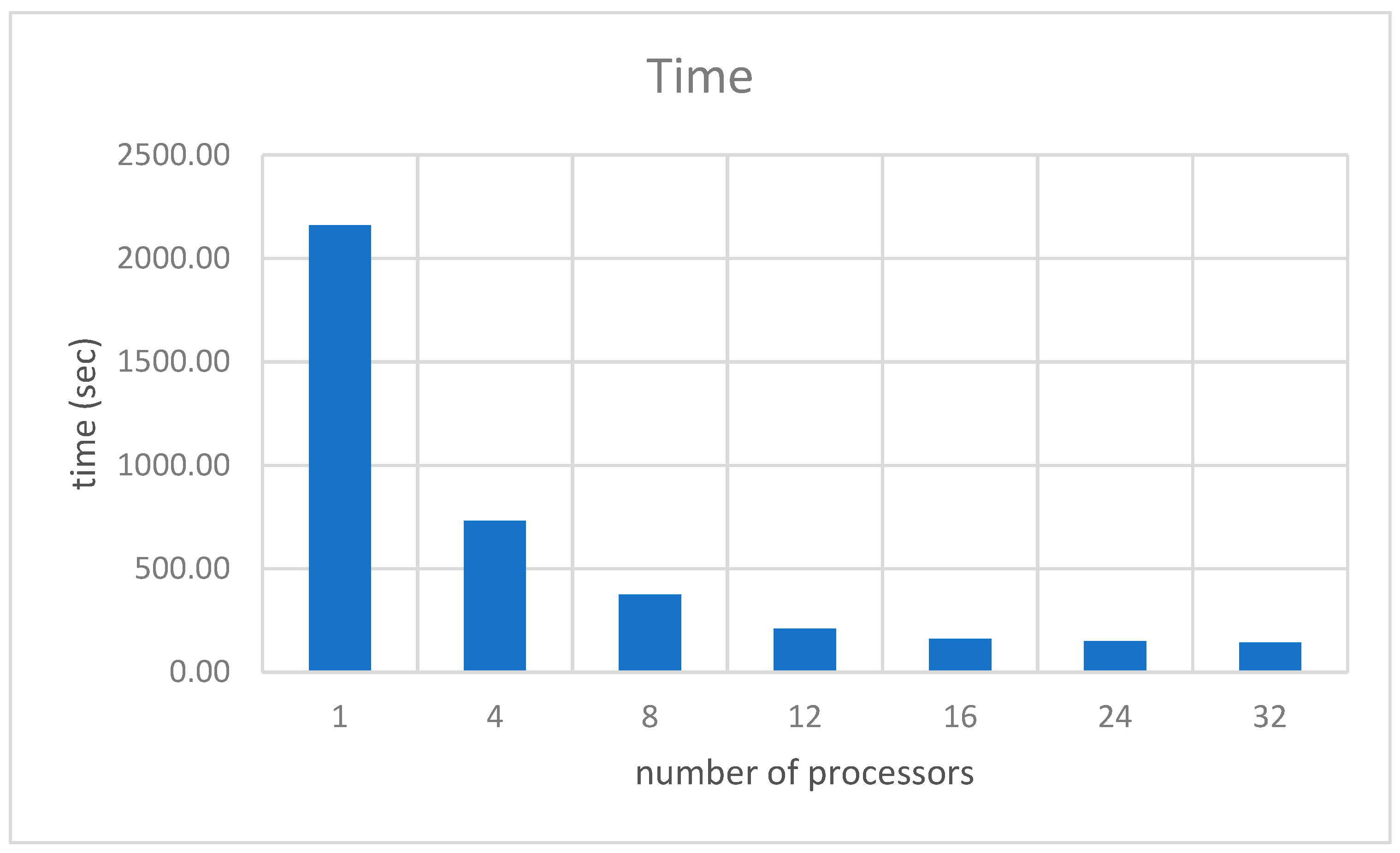
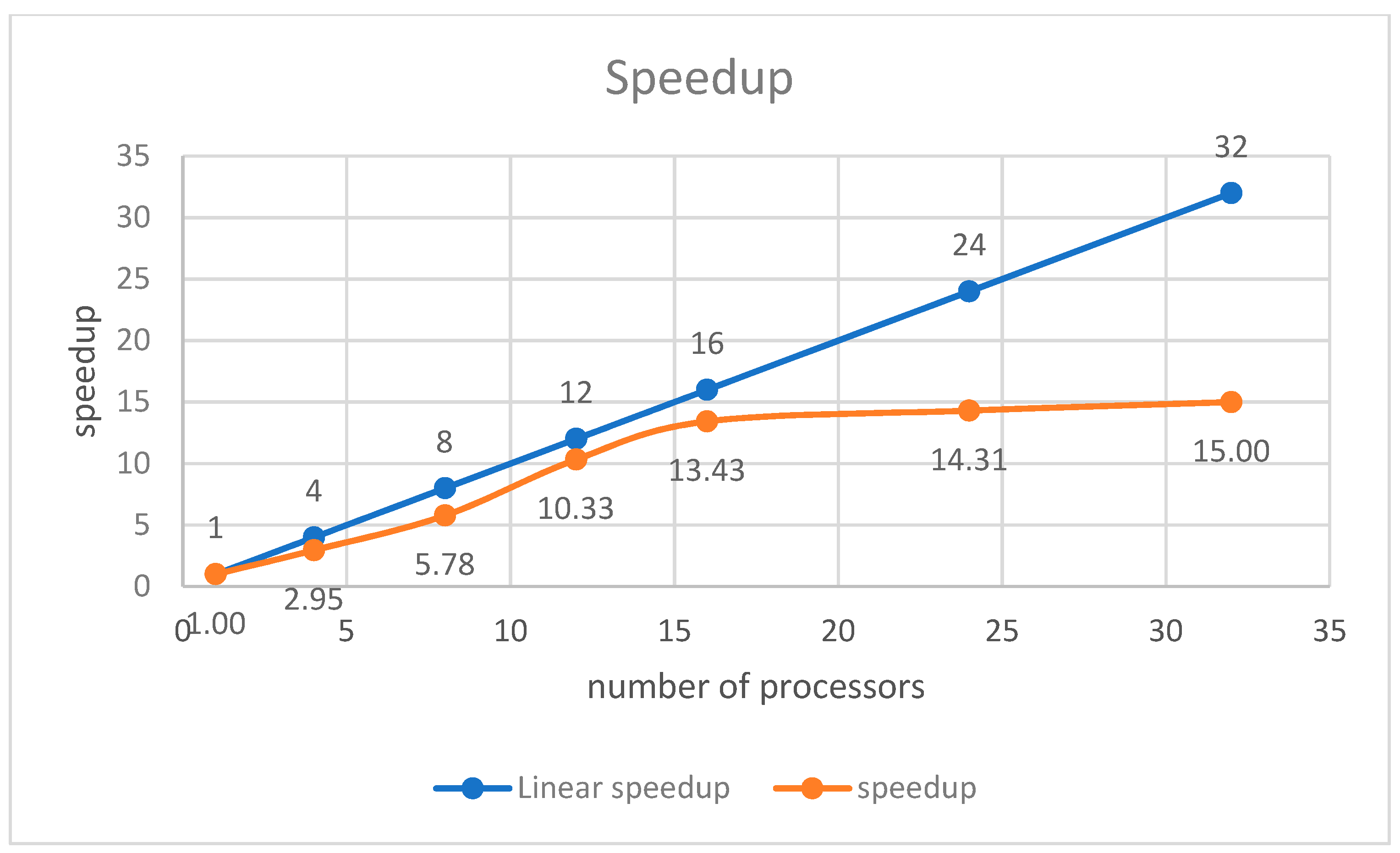
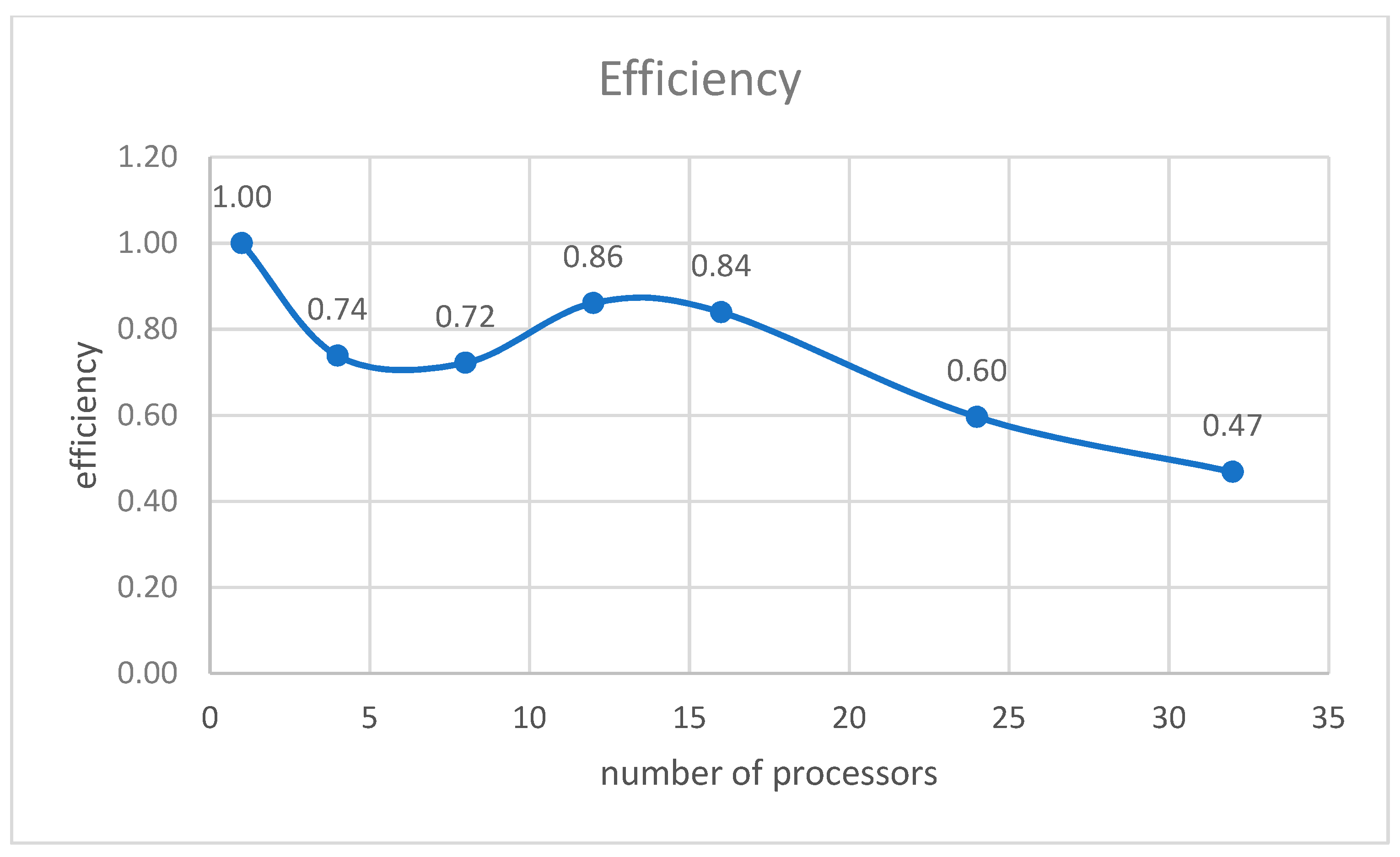
| k | tk | Ck | Ek |
|---|---|---|---|
| 1 | 2159.68 | 1.00 | 1.00 |
| 4 | 731.08 | 2.95 | 0.74 |
| 8 | 373.85 | 5.78 | 0.72 |
| 12 | 209.04 | 10.33 | 0.86 |
| 16 | 160.79 | 13.43 | 0.84 |
| 24 | 150.93 | 14.31 | 0.60 |
| 32 | 144.02 | 15.00 | 0.47 |
| i | i | i | ||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 139.4106 | −148.7203 | 35 | −192.0113 | 152.7411 | 69 | −57.0781 | 139.3253 |
| 2 | 165.9300 | −180.7356 | 36 | −20.2820 | 57.6283 | 70 | 65.7095 | −121.7164 |
| 3 | −10.4564 | 139.3668 | 37 | −33.4277 | −76.2563 | 71 | −60.8956 | 205.8394 |
| 4 | 90.6188 | −228.0052 | 38 | −25.6351 | −26.4029 | 72 | −66.4087 | −215.3460 |
| 5 | −85.8170 | −120.5509 | 39 | 153.5649 | 88.7727 | 73 | 95.7131 | 204.0172 |
| 6 | 73.5905 | 127.7710 | 40 | 14.8656 | 116.2411 | 74 | −174.8863 | 52.7062 |
| 7 | −157.6668 | 127.7678 | 41 | 5.8499 | −16.7581 | 75 | 31.2989 | −218.4935 |
| 8 | −177.5573 | 169.3267 | 42 | 65.9473 | 43.6220 | 76 | −23.6507 | 99.4930 |
| 9 | −70.5784 | −169.3974 | 43 | −25.8560 | 167.4177 | 77 | −224.7904 | 15.9151 |
| 10 | 95.7456 | 55.2866 | 44 | 50.5852 | 229.8526 | 78 | −81.3118 | 12.9985 |
| 11 | −109.3281 | 44.9178 | 45 | 175.1576 | 157.1970 | 79 | −170.0251 | −13.1497 |
| 12 | 150.5197 | 110.5609 | 46 | 125.6546 | 43.9088 | 80 | 219.2165 | 52.2319 |
| 13 | −74.5636 | 166.1256 | 47 | 178.0610 | −69.8027 | 81 | −16.3268 | −178.7973 |
| 14 | −171.4504 | 144.9147 | 48 | −29.8828 | 5.3140 | 82 | −196.1507 | 110.9455 |
| 15 | −15.5382 | −136.8047 | 49 | 137.0313 | 139.5792 | 83 | −62.7066 | −46.1440 |
| 16 | 171.8182 | 16.2934 | 50 | −18.1262 | −234.6541 | 84 | 14.7585 | 34.4732 |
| 17 | −39.7282 | 242.1153 | 51 | −53.7898 | 57.1181 | 85 | −1.2195 | 225.3498 |
| 18 | 141.1580 | −200.6803 | 52 | −47.5357 | −137.2039 | 86 | 111.8985 | 94.0562 |
| 19 | −158.9000 | 91.5448 | 53 | 187.9781 | −110.6151 | 87 | 49.9061 | 93.0860 |
| 20 | 201.8791 | −139.4381 | 54 | 34.1020 | −166.1113 | 88 | −194.0441 | −70.3082 |
| 21 | 37.9330 | −105.8272 | 55 | 165.9846 | 59.2811 | 89 | 192.4508 | 108.1568 |
| 22 | −28.6723 | 37.2911 | 56 | 96.9196 | 152.0312 | 90 | −183.1233 | −131.3388 |
| 23 | −235.9375 | −67.3175 | 57 | 15.3707 | −128.5195 | 91 | 95.2733 | −176.2139 |
| 24 | −132.9352 | 54.7309 | 58 | 171.4069 | −149.2078 | 92 | −122.5708 | −170.2925 |
| 25 | 93.6021 | 27.5218 | 59 | −62.9718 | −98.1434 | 93 | 214.4583 | −19.6107 |
| 26 | 146.8699 | −169.7488 | 60 | 218.3642 | −81.6204 | 94 | 132.4803 | −17.7144 |
| 27 | 11.3898 | 76.3379 | 61 | −225.3420 | 67.9122 | 95 | −101.7842 | 96.3677 |
| 28 | 34.5368 | −2.5784 | 62 | 73.8224 | 2.3670 | 96 | 53.6401 | −56.2562 |
| 29 | 154.2352 | 29.5161 | 63 | 144.4278 | 185.8271 | 97 | −123.5010 | −84.7191 |
| 30 | −224.2984 | −99.4403 | 64 | −8.4552 | −56.2468 | 98 | −125.8419 | 174.7592 |
| 31 | 69.8306 | −235.2059 | 65 | −232.6625 | −35.4856 | 99 | 123.4839 | −99.2194 |
| 32 | −174.5260 | −172.4495 | 66 | −132.3921 | 22.7355 | 100 | 36.0347 | 163.7371 |
| 33 | 5.5154 | −85.0361 | 67 | −118.9449 | −22.8867 | |||
| 34 | −79.2399 | −141.5447 | 68 | −19.4571 | −105.0456 |
| i | i | i | ||||||
|---|---|---|---|---|---|---|---|---|
| 1 | −45.4108 | 106.9596 | 35 | 122.9228 | −7.1056 | 69 | 84.7426 | 74.1280 |
| 2 | 70.2790 | −41.6277 | 36 | −80.7209 | −121.0597 | 70 | 127.1753 | −38.8218 |
| 3 | 82.4623 | 106.0466 | 37 | −75.5893 | 78.1391 | 71 | 13.1500 | 149.8033 |
| 4 | 52.4820 | 82.9348 | 38 | 185.2119 | 59.8396 | 72 | −224.0971 | −22.2112 |
| 5 | 95.4186 | −34.8836 | 39 | −65.3203 | 97.5992 | 73 | −138.3141 | 65.5081 |
| 6 | 55.4959 | 61.1422 | 40 | −27.8345 | 158.9831 | 74 | −35.0326 | −222.4535 |
| 7 | −10.6496 | 72.8616 | 41 | −110.2915 | −108.8296 | 75 | −98.0049 | 202.3002 |
| 8 | −37.8368 | −20.6103 | 42 | 21.1518 | 76.4216 | 76 | −8.7590 | −155.9050 |
| 9 | −135.0830 | −88.5964 | 43 | −12.8746 | 104.7842 | 77 | −77.0574 | 36.1647 |
| 10 | −52.8890 | −4.5655 | 44 | −81.7715 | −18.3424 | 78 | 28.2801 | −41.9345 |
| 11 | −95.1176 | −137.6949 | 45 | 154.9222 | −7.2923 | 79 | −68.9963 | −170.5838 |
| 12 | 37.2911 | 48.7896 | 46 | 230.5373 | −45.3839 | 80 | −68.5395 | −74.5900 |
| 13 | −151.8092 | −16.0172 | 47 | 114.3888 | 103.8789 | 81 | 206.2285 | 1.1733 |
| 14 | 123.9678 | −111.0752 | 48 | −97.9383 | 105.1093 | 82 | −149.7678 | 168.1739 |
| 15 | −29.3590 | 132.2116 | 49 | −176.2423 | −42.5563 | 83 | 122.4704 | 180.7840 |
| 16 | −167.0885 | −73.2191 | 50 | 86.9860 | 137.7383 | 84 | −124.5224 | −47.9457 |
| 17 | −190.4386 | 2.9106 | 51 | −23.2266 | −49.0803 | 85 | −68.3349 | 147.8602 |
| 18 | 115.1268 | −131.2206 | 52 | −11.5071 | −103.2896 | 86 | −209.5402 | −82.4969 |
| 19 | −109.4713 | 156.3334 | 53 | −194.4786 | −132.2679 | 87 | −189.9519 | 120.9591 |
| 20 | 101.1534 | −78.3999 | 54 | 218.3378 | 87.4377 | 88 | 177.8639 | −53.9579 |
| 21 | 20.2577 | 108.4091 | 55 | −42.5723 | 75.0849 | 89 | 133.2627 | 55.4251 |
| 22 | −54.4610 | −35.0199 | 56 | 31.4821 | −93.8401 | 90 | 51.6126 | −141.7886 |
| 23 | 176.9704 | 39.4416 | 57 | 69.5126 | −73.6185 | 91 | 74.9291 | 12.9096 |
| 24 | 14.9748 | −121.2538 | 58 | 51.7187 | 114.9257 | 92 | −140.5877 | −162.9234 |
| 25 | 130.6056 | 13.5093 | 59 | 230.4083 | 47.2095 | 93 | 55.7506 | 207.8480 |
| 26 | 198.7563 | 42.5033 | 60 | −157.3516 | 17.1183 | 94 | 171.4856 | 128.0440 |
| 27 | 96.7626 | −56.8425 | 61 | −97.7063 | −213.9397 | 95 | 173.2629 | −127.6280 |
| 28 | −110.8739 | 134.3782 | 62 | 133.0906 | −80.4032 | 96 | −26.5284 | 210.9667 |
| 29 | 161.2199 | 24.0819 | 63 | 92.0306 | −109.0719 | 97 | 112.9423 | −183.1747 |
| 30 | 244.4979 | 18.4780 | 64 | −138.0666 | 117.5075 | 98 | −208.9399 | 51.5080 |
| 31 | 55.0646 | 146.7503 | 65 | −48.7620 | −122.6821 | 99 | 36.2227 | −212.1246 |
| 32 | 0.9221 | −73.8021 | 66 | 218.9989 | −85.7685 | 100 | −6.6694 | 21.0142 |
| 33 | −97.0099 | 73.1228 | 67 | −162.6154 | −104.9049 | |||
| 34 | −173.1583 | −10.7053 | 68 | −117.5900 | 3.5901 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Romanova, T.; Pankratov, O.; Litvinchev, I.; Stetsyuk, P.; Lykhovyd, O.; Marmolejo-Saucedo, J.A.; Vasant, P. Balanced Circular Packing Problems with Distance Constraints. Computation 2022, 10, 113. https://doi.org/10.3390/computation10070113
Romanova T, Pankratov O, Litvinchev I, Stetsyuk P, Lykhovyd O, Marmolejo-Saucedo JA, Vasant P. Balanced Circular Packing Problems with Distance Constraints. Computation. 2022; 10(7):113. https://doi.org/10.3390/computation10070113
Chicago/Turabian StyleRomanova, Tetyana, Olexandr Pankratov, Igor Litvinchev, Petro Stetsyuk, Oleksii Lykhovyd, Jose Antonio Marmolejo-Saucedo, and Pandian Vasant. 2022. "Balanced Circular Packing Problems with Distance Constraints" Computation 10, no. 7: 113. https://doi.org/10.3390/computation10070113