

Investigation of a Hybrid LSTM + 1DCNN Approach to Predict In-Cylinder Pressure of Internal Combustion Engines



Abstract
:1. Introduction
2. Materials and Methods
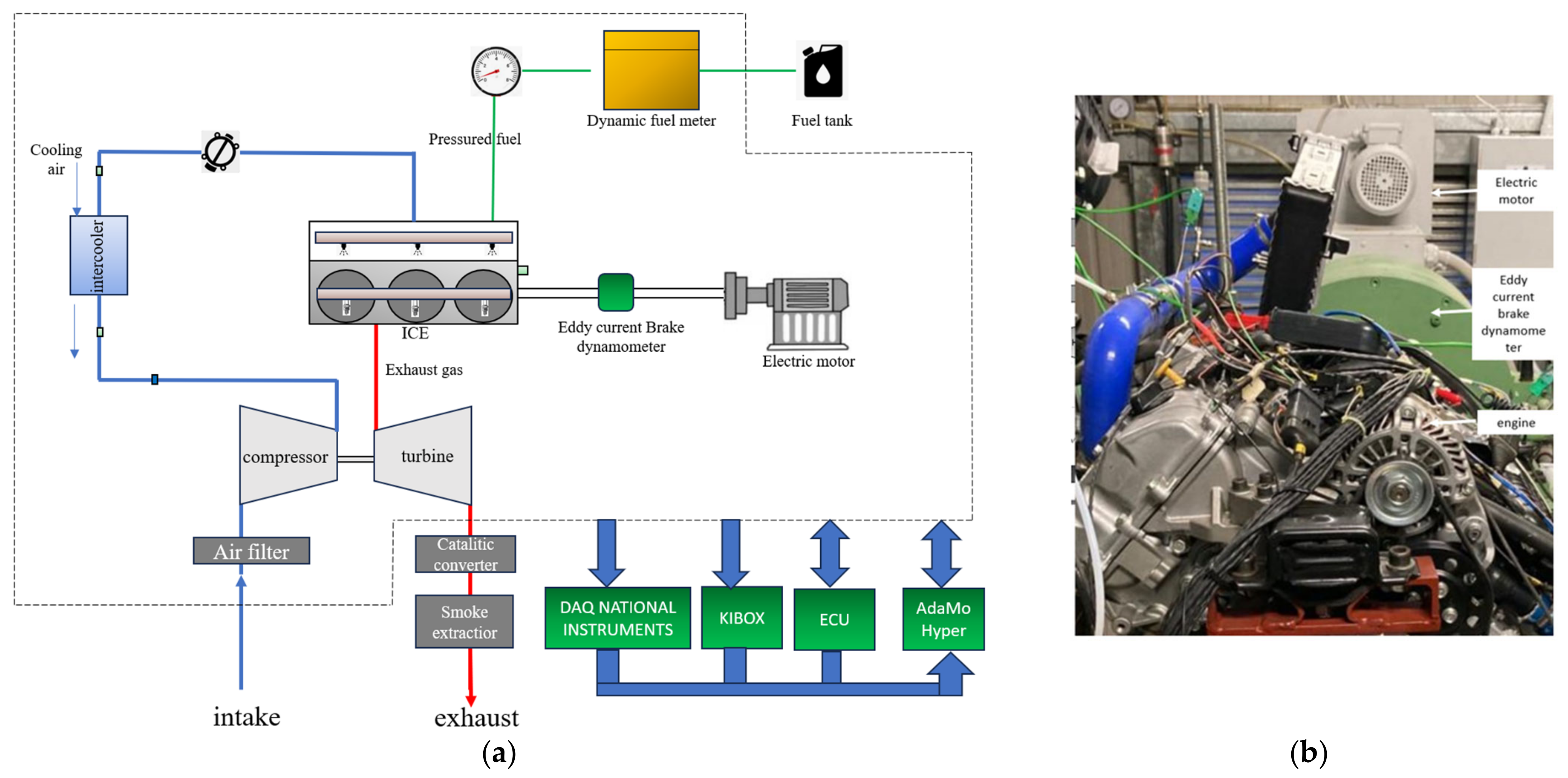
2.1. Experimental Setup
2.2. Definition of the Case Study for In-Cylinder Prediction
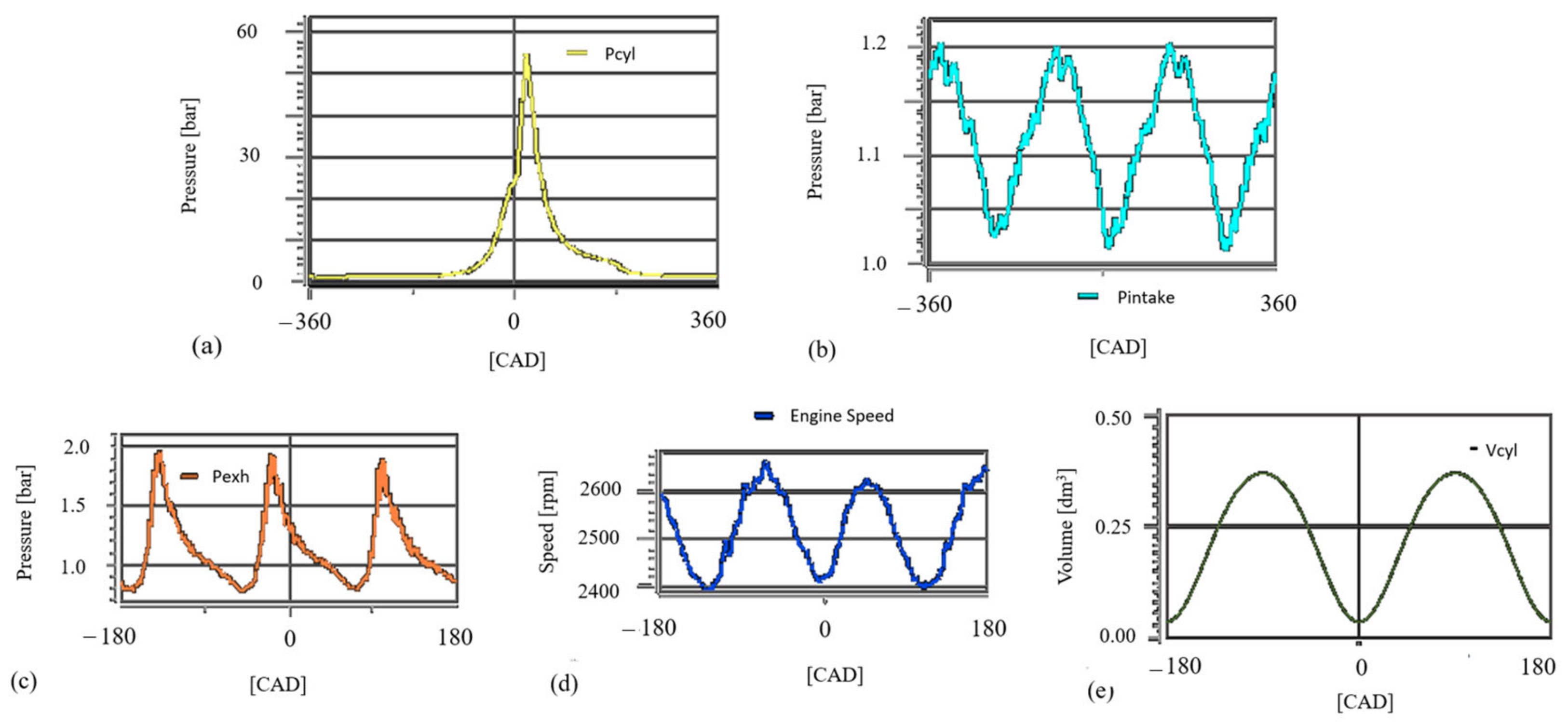
2.2.1. Definition of the Involved Parameters
- In-cylinder volume during the engine cycle in dm3, Vcyl.
- Pressure at the intake port in bar, Pint.
- Pressure at the exhaust port in bar, Pexh.
- Position of the crankshaft during the engine cycle in the crank angle degree, CAD.
- Rotational speed of the engine in rpm, EngineSpeed.

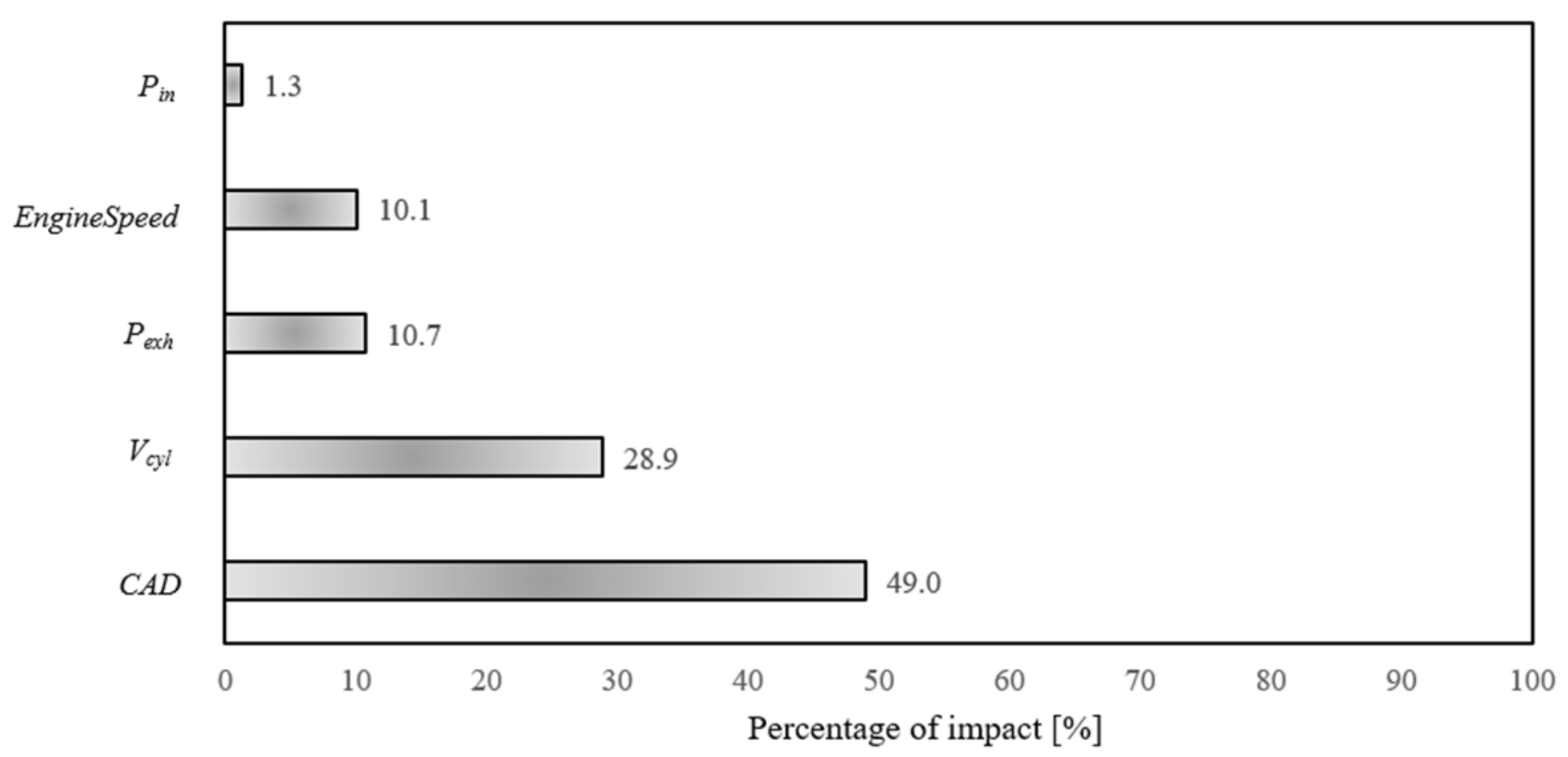
2.2.2. Evaluating the Influence of the Input Parameters on the Pressure Prediction
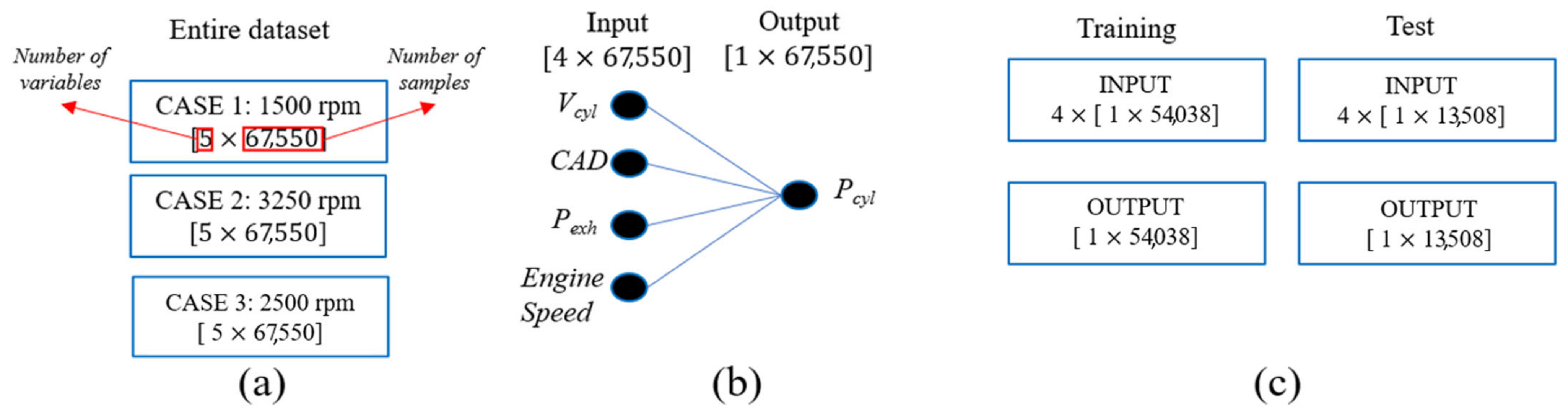
2.2.3. Definition of the Final Dataset for the Pressure Prediction
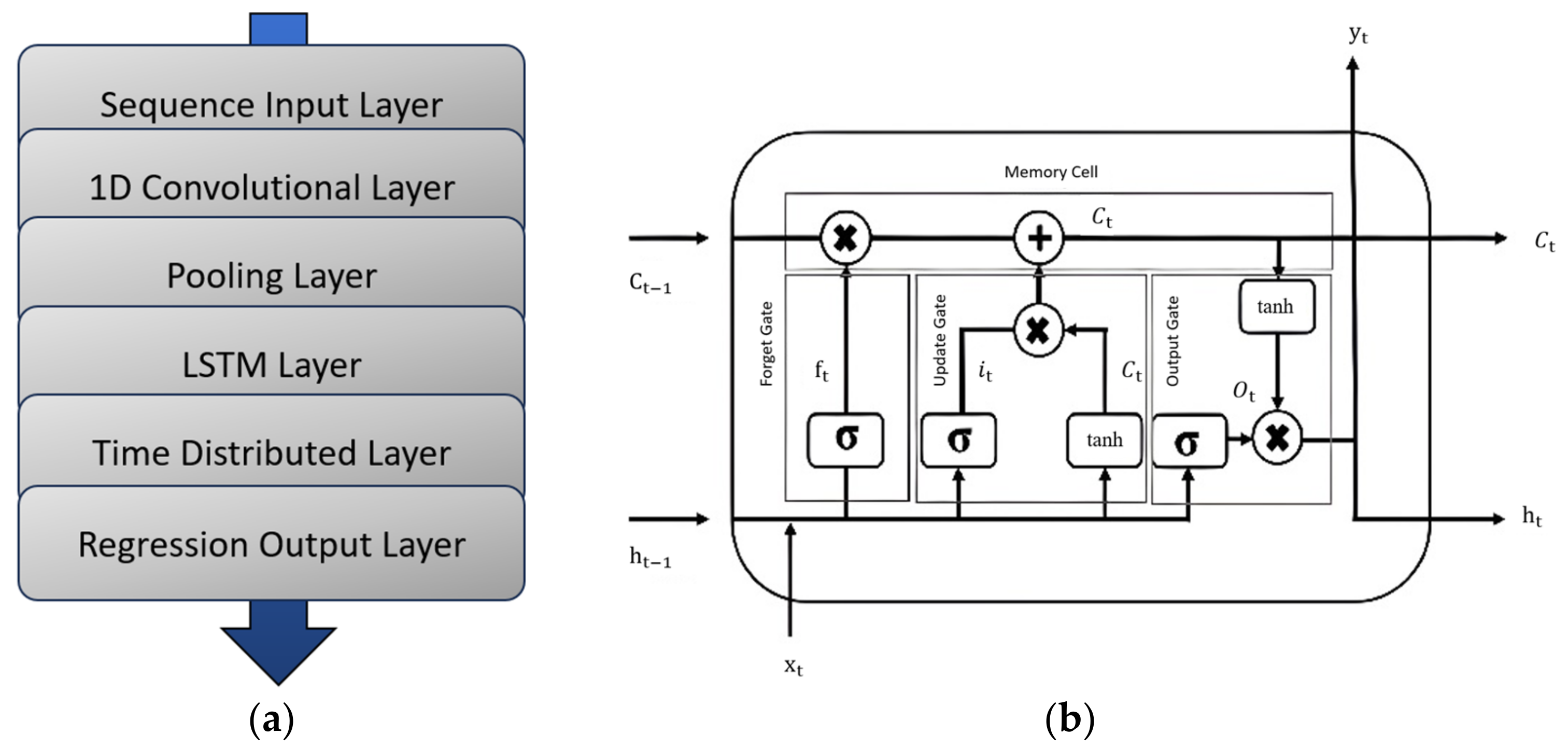
2.3. Creating an Artificial Architecture to Predict In-Cylinder Pressure
2.3.1. Structure of the LSTM + 1DCNN Model
2.3.2. Definition of the Procedures to Determine the Structural Parameters of the Proposed Models
- The number of neurons in the 1DCNN layers Nc varies from 50 to 200.
- The number of neurons in the LSTM hidden layers Nh varies from 50 to 200.
- The batch size Bs varies from 8 to 64.
- The model depth Md varies from 1 to 5.
3. Results and Discussions
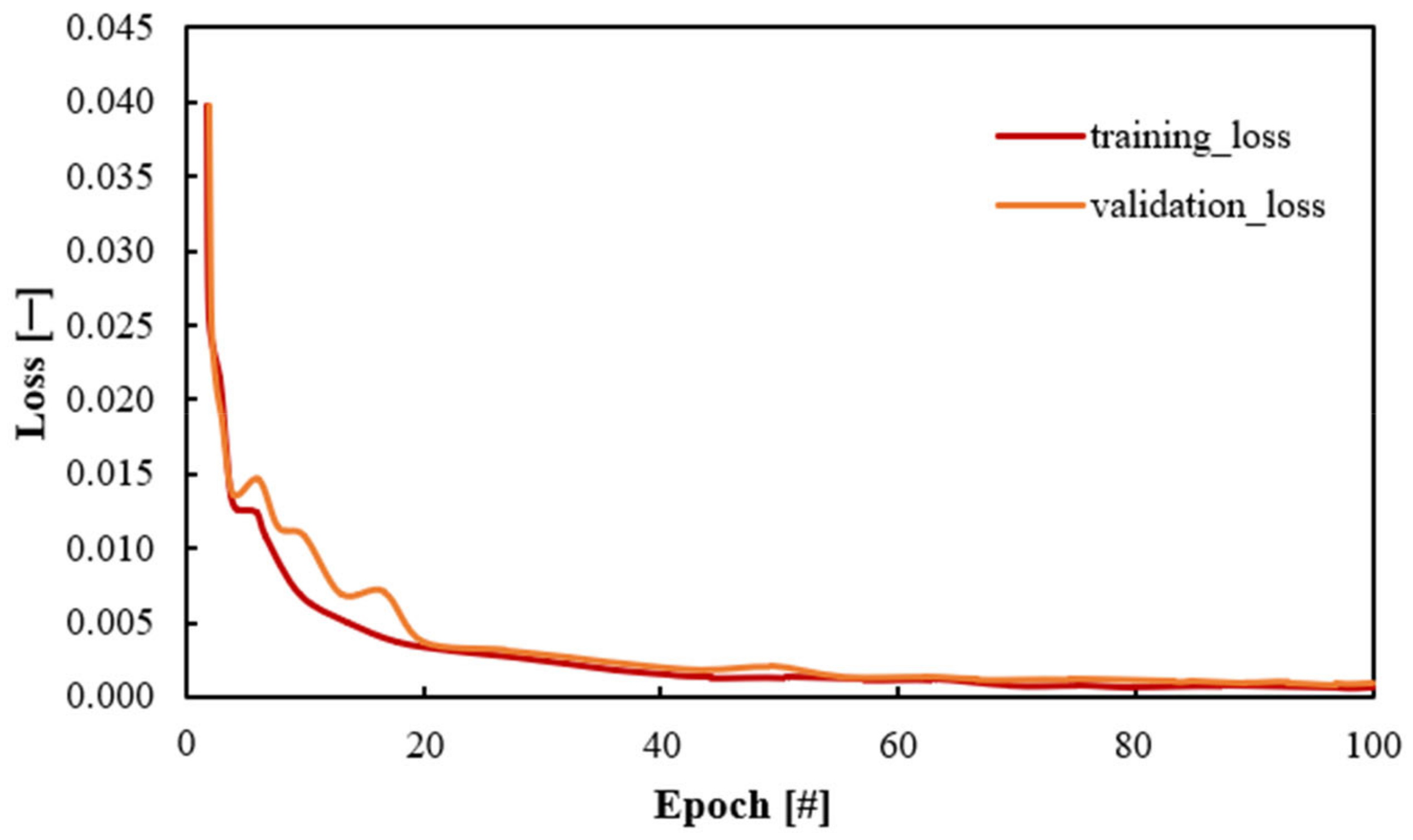
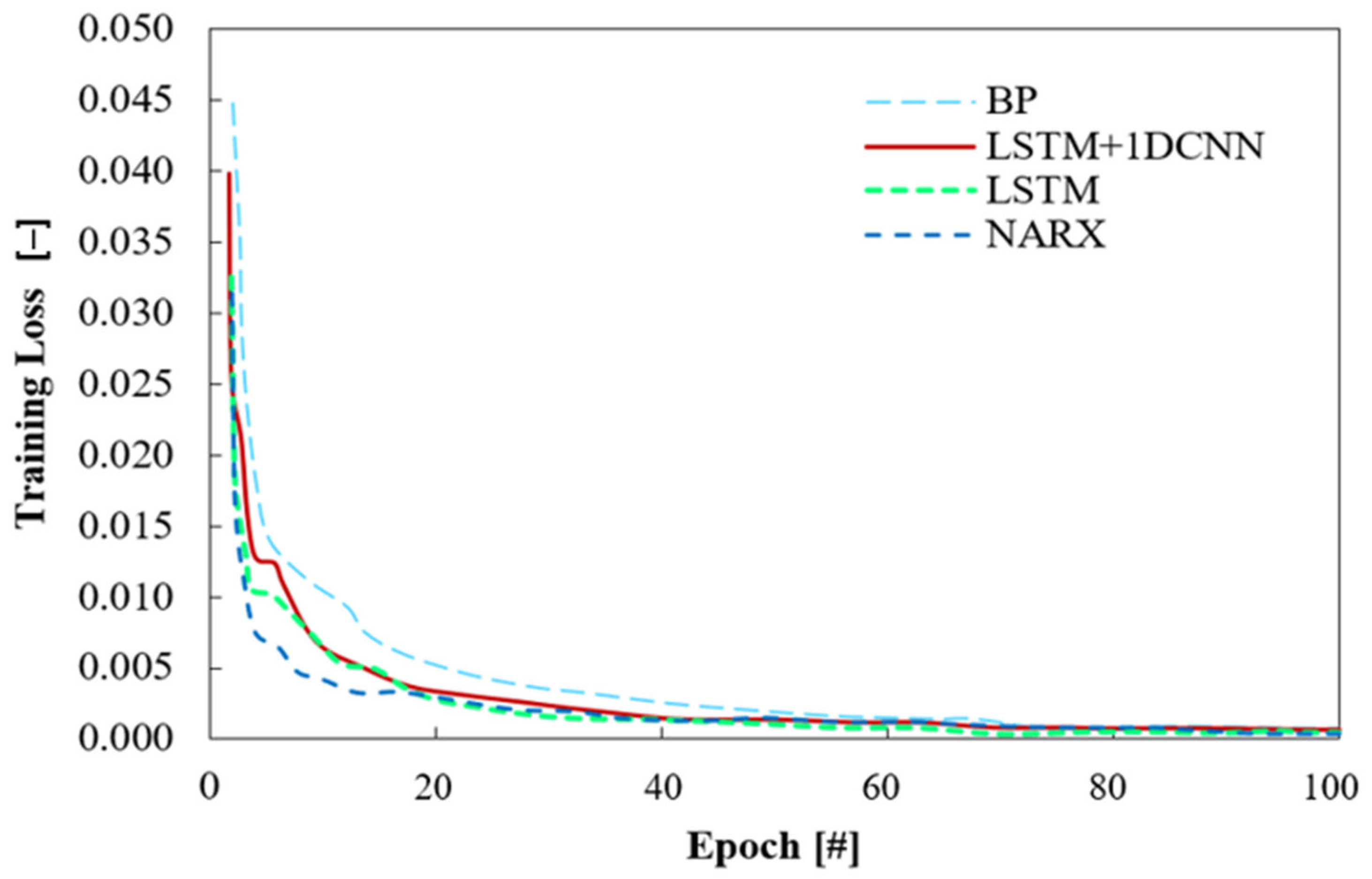
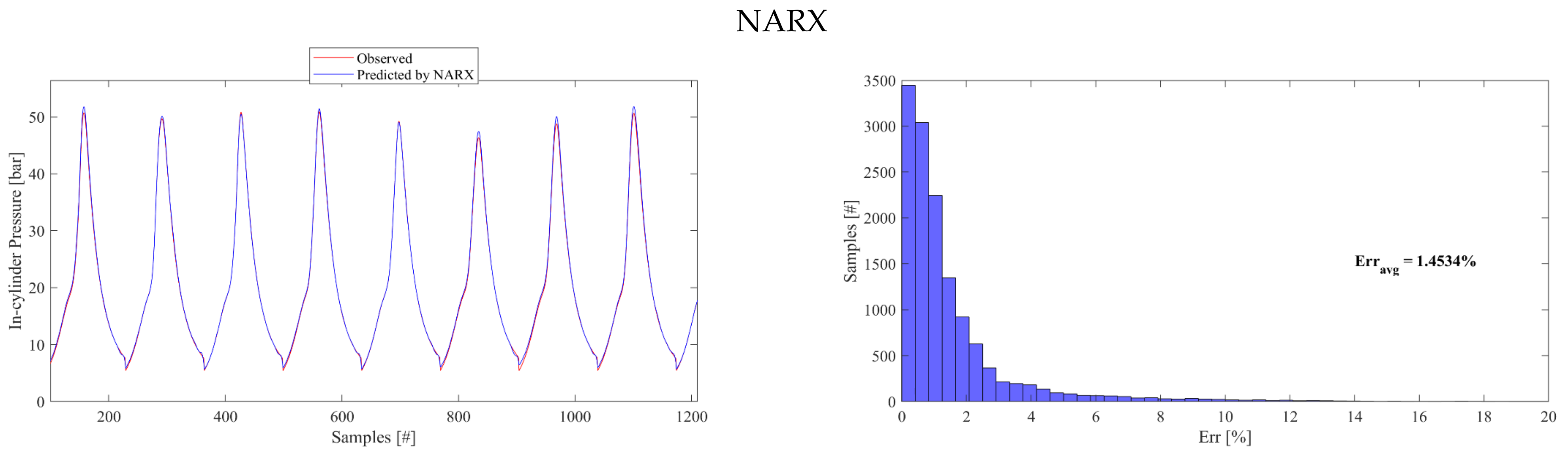
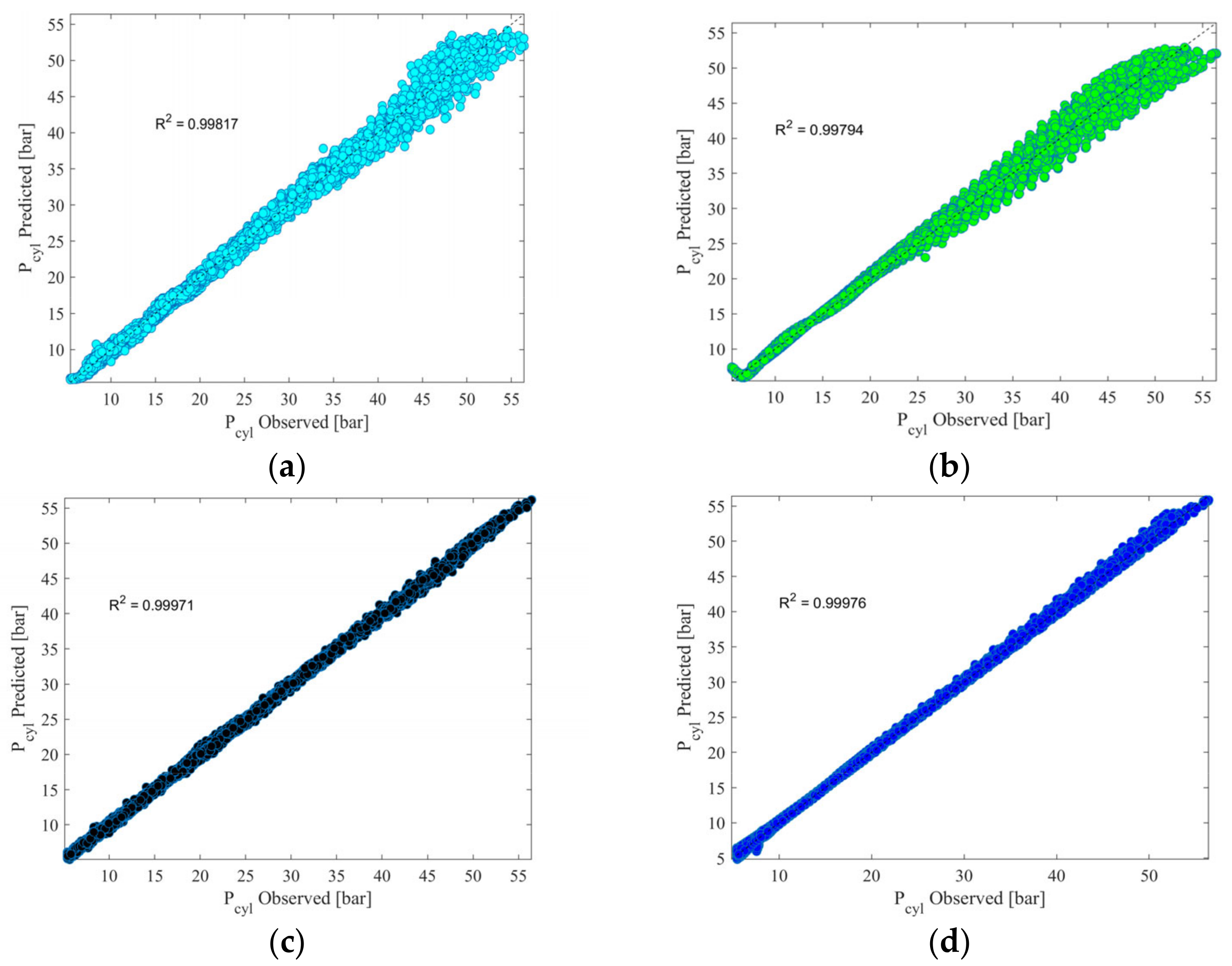
3.1. Performance on Training
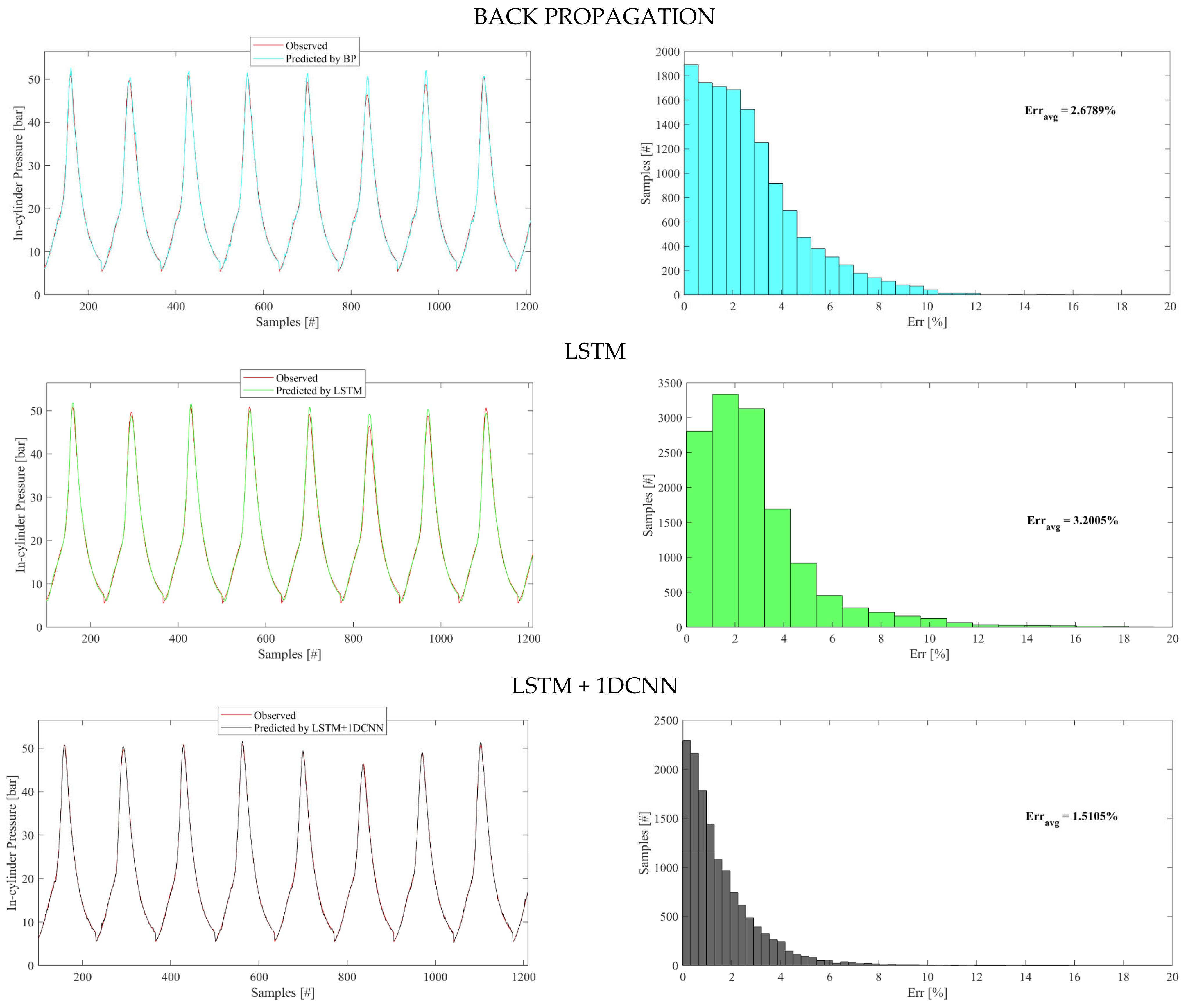
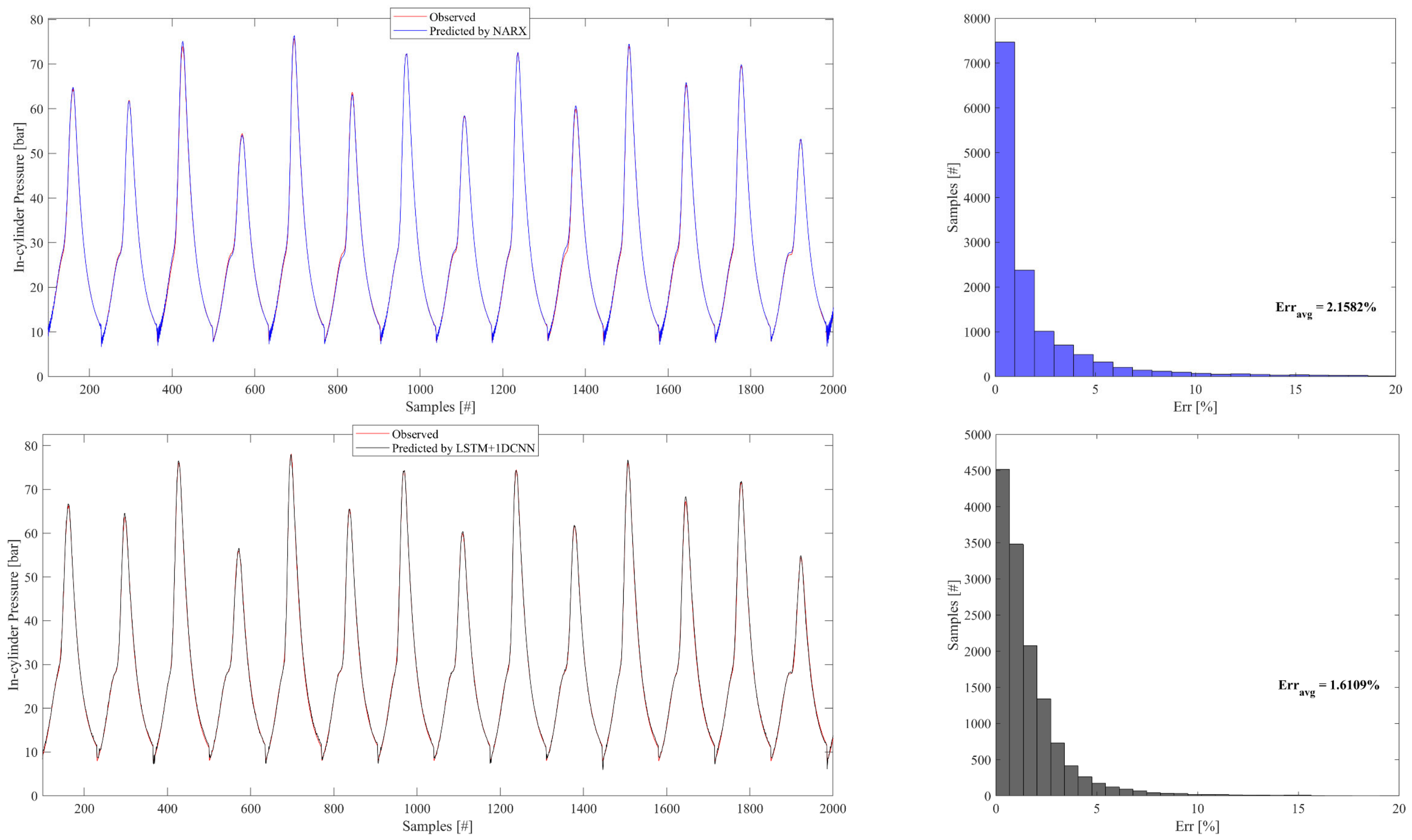
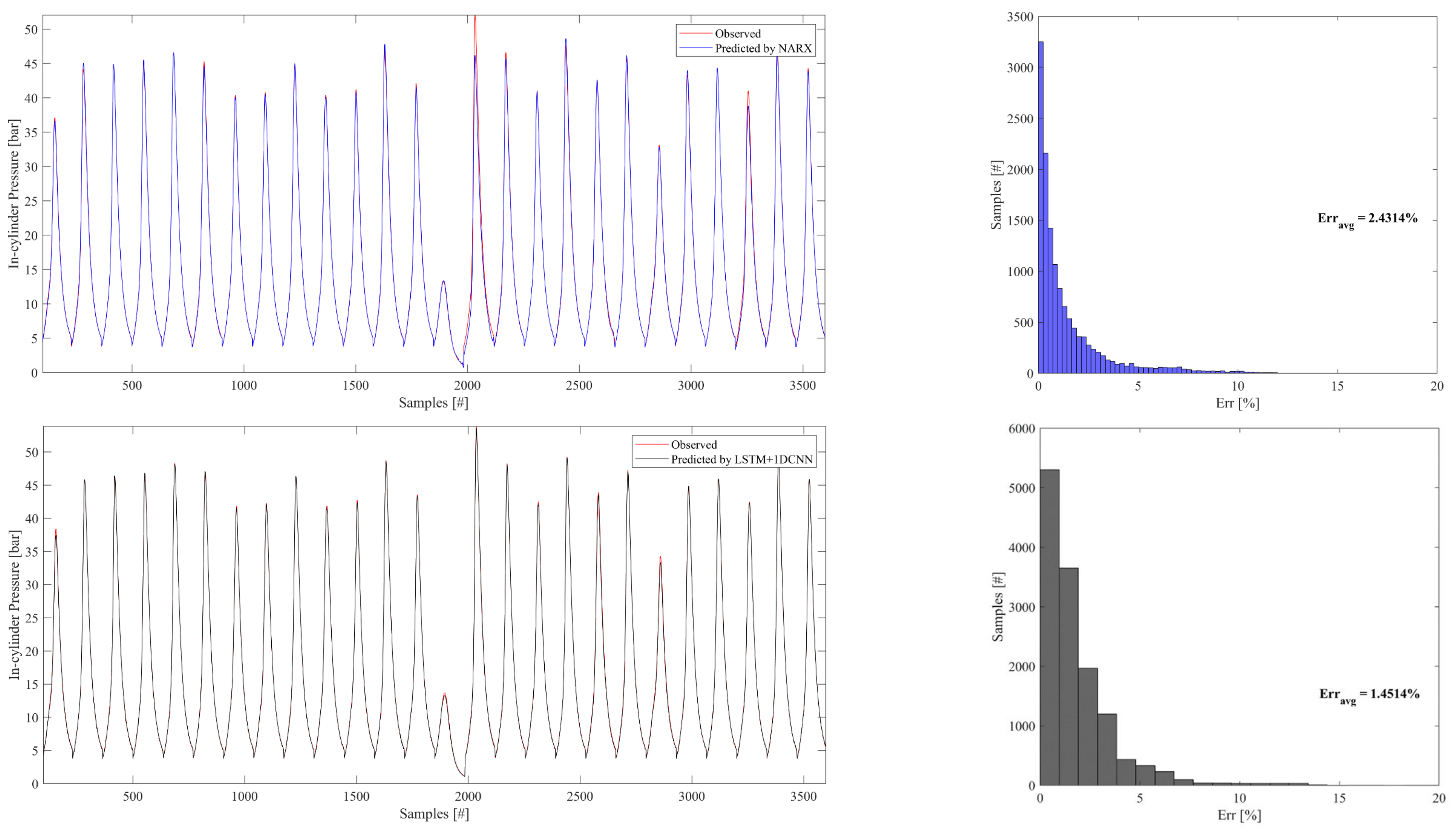
3.2. Performance on Test
4. Conclusions
- Key Findings:
- Implications:
- Future Research and Testing:
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Err | Percentage Errors |
| Erravg | Average Percentage Errors |
| ABSV | Absolute Shapley Values |
| CAD | Crank Angle Degree |
| CNN | Convolutional Neural Network |
| CoV | Coefficient of Variation |
| DNN | Deep Neural Network |
| ECU | Engine Control Unit |
| EGR | Exhaust Gas Recirculation |
| ELM | Extreme Learning Machines |
| ICE | Internal Combustion Engine |
| IMEP | Indicated Mean Effective Pressure |
| ML | Machine Learning |
| NMPC | Nonlinear Model Predictive Controller |
| IT | Ignition Timing |
| LSTM | Long Short-Term Memory |
| MON | Motor Octane Number |
| NARX | Nonlinear Autoregressive Network with Exogenous Inputs |
| PCYL | In-cylinder Pressure |
| PFI | Port Fuel Injection |
| RON | Research Octane Number |
| SI | Spark Ignition |
References
- Lim, K.Y.H.; Zheng, P.; Chen, C.H. A state-of-the-art survey of Digital Twin: Techniques, engineering product lifecycle management and business innovation perspectives. J. Intell. Manuf. 2020, 31, 1313–1337. [Google Scholar] [CrossRef]
- Joshi, A. Review of vehicle engine efficiency and emissions. SAE Int. J. Adv. Curr. Pract. Mobil. 2020, 2, 2479–2507. [Google Scholar] [CrossRef]
- Reitz, R.D.; Ogawa, H.; Payri, R.; Fansler, T.; Kokjohn, S.; Moriyoshi, Y.; Agarwal, A.K.; Arcoumanis, D.; Assanis, D.; Bae, C.; et al. IJER Editorial: The Future of the Internal Combustion Engine. Int. J. Engine Res. 2020, 21, 3–10. [Google Scholar] [CrossRef]
- Al-Samari, A. Study of emissions and fuel economy for parallel hybrid versus conventional vehicles on real world and standard driving cycles. Alex. Eng. J. 2017, 56, 721–726. [Google Scholar] [CrossRef]
- Witanowski, Ł.; Breńkacz, Ł.; Szewczuk-Krypa, N.; Dorosińska-Komor, M.; Puchalski, B. Comparable analysis of PID controller settings in order to ensure reliable operation of active foil bearings. Eksploat. I Niezawodn. 2022, 24, 377–385. [Google Scholar] [CrossRef]
- Rudolph, C.; Freund, D.; Kaczmarek, D.; Atakan, B. Low-calorific ammonia containing off-gas mixture: Modelling the conversion in HCCI engines. Combust. Flame 2022, 243, 112063. [Google Scholar] [CrossRef]
- García, A.; Monsalve-Serrano, J. Analysis of a series hybrid vehicle concept that combines low temperature combustion and biofuels as power source. Results Eng. 2019, 1, 100001. [Google Scholar] [CrossRef]
- He, X.; Wang, Q.; Fernandes, R.; Shu, B. Investigation on the autoignition characteristics of propanol and butanol isomers under diluted lean conditions for stratified low temperature combustion. Combust. Flame 2022, 237, 111818. [Google Scholar] [CrossRef]
- Alvarez, C.E.C.; Couto, G.E.; Roso, V.R.; Thiriet, A.B.; Valle, R.M. A review of prechamber ignition systems as lean combustion technology for SI engines. Appl. Therm. Eng. 2018, 128, 107–120. [Google Scholar] [CrossRef]
- Lukic, S.M.; Ali, E. Effects of drivetrain hybridization on fuel economy and dynamic performance of parallel hybrid electric vehicles. IEEE Trans. Veh. Technol. 2004, 53, 385–389. [Google Scholar] [CrossRef]
- Chau, K.T.; Wong, Y.S. Hybridization of energy sources in electric vehicles. Energy Convers. Manag. 2001, 42, 1059–1069. [Google Scholar] [CrossRef]
- Zou, R.; Liu, J.; Jiao, H.; Wang, N.; Zhao, J. Numerical study on auto-ignition development and knocking characteristics of a downsized rotary engine under different inlet pressures. Fuel 2022, 309, 122046. [Google Scholar] [CrossRef]
- Kouhyar, F.; Nikzadfar, K. A Model-Based Investigation of Electrically Split Turbocharger Systems Capabilities to Overcome the Drawbacks of High-Boost Downsized Engines; SAE Technical Paper No. 2022-01-5052; SAE International: Warrendale, PA, USA, 2022. [Google Scholar]
- Lanni, D.; Galloni, E.; Fontana, G. Numerical analysis of the effects of port water injection in a downsized SI engine at partial and full load operation. Appl. Therm. Eng. 2022, 205, 118060. [Google Scholar] [CrossRef]
- Sun, X.; Ning, J.; Liang, X.; Jing, G.; Chen, Y.; Chen, G. Effect of direct water injection on combustion and emissions characteristics of marine diesel engines. Fuel 2022, 309, 122213. [Google Scholar] [CrossRef]
- Zhou, L.; Song, Y.; Hua, J.; Liu, F.; Liu, Z.; Wei, H. Effects of different hole structures of pre-chamber with turbulent jet ignition on the flame propagation and lean combustion performance of a single-cylinder engine. Fuel 2022, 308, 121902. [Google Scholar] [CrossRef]
- Molina, S.; Novella, R.; Gomez-Soriano, J.; Olcina-Girona, M. Experimental Evaluation of Methane-Hydrogen Mixtures for Enabling Stable Lean Combustion in Spark-Ignition Engines for Automotive Applications; SAE Technical Paper No. 2022-01-0471; SAE International: Warrendale, PA, USA, 2022. [Google Scholar]
- Liu, X.; Aljabri, H.; Silva, M.; AlRamadan, A.S.; Ben Houidi, M.; Cenker, E.; Im, H.G. Hydrogen pre-chamber combustion at lean-burn conditions on a heavy-duty diesel engine: A computational study. Fuel 2023, 335, 127042. [Google Scholar] [CrossRef]
- Atkinson, C. Fuel Efficiency Optimization Using Rapid Transient Engine Calibration; SAE Technical Paper No. 2014-01-2359; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Dimopoulos, P.; Rechsteiner, C.; Soltic, P.; Laemmle, C.; Boulouchos, K. Increase of passenger car engine efficiency with low engine-out emissions using hydrogen–natural gas mixtures: A thermodynamic analysis. Int. J. Hydrogen Energy 2007, 32, 3073–3083. [Google Scholar] [CrossRef]
- Iqbal, M.Y.; Wang, T.; Li, G.; Li, S.; Hu, G.; Yang, T.; Gu, F.; Al-Nehari, M. Development and Validation of a Vibration-Based Virtual Sensor for Real-Time Monitoring NOx Emissions of a Diesel Engine. Machines 2022, 10, 594. [Google Scholar] [CrossRef]
- Ricci, F.; Petrucci, L.; Mariani, F. Using a Machine Learning Approach to Evaluate the NOx Emissions in a Spark-Ignition Optical Engine. Information 2023, 14, 224. [Google Scholar] [CrossRef]
- Hasan, A.; Leung, P.; Tsolakis, A.; Golunski, S.; Xu, H.; Wyszynski, M.; Richardson, S. Effect of composite aftertreatment catalyst on alkane, alkene and monocyclic aromatic emissions from an HCCI/SI gasoline engine. Fuel 2011, 90, 1457–1464. [Google Scholar] [CrossRef]
- Zembi, J.; Ricci, F.; Grimaldi, C.; Battistoni, M. Numerical Simulation of the Early Flame Development Produced by a Barrier Discharge Igniter in an Optical Access Engine; SAE Technical Paper No. 2021-24-0011; SAE International: Warrendale, PA, USA, 2021. [Google Scholar]
- Thompson, G.J.; Atkinson, C.M.; Clark, N.N.; Long, T.W.; Hanzevack, E. Neural network modelling of the emissions and performance of a heavy-duty diesel engine. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2000, 214, 111–126. [Google Scholar] [CrossRef]
- Escobar, C.A.; Morales-Menendez, R. Machine learning techniques for quality control in high conformance manufacturing environment. Adv. Mech. Eng. 2018, 10, 1687814018755519. [Google Scholar] [CrossRef]
- Suzuki, K. (Ed.) Artificial Neural Networks—Industrial and Control Engineering; IntechOpen: Rijeka, Croatia, 2011. [Google Scholar]
- Das, A.K.; Padhi, M.R.; Hansdah, D.; Panda, A.K. Optimization of engine parameters and ethanol fuel additive of a diesel engine fuelled with waste plastic oil blended diesel. Process Integr. Optim. Sustain. 2020, 4, 465–479. [Google Scholar] [CrossRef]
- Shamekhi, A.; Shamekhi, A.H. Expert Systems with Applications: A New Approach in Improvement of Mean Value Models for Spark Ignition Engines Using Neural Networks. Expert Syst. Appl. 2015, 42, 5192–5218. [Google Scholar] [CrossRef]
- Li, X.-Q.; Song, L.-K.; Choy, Y.-S.; Bai, G.-C. Multivariate ensembles-based hierarchical linkage strategy for system reliability evaluation of aeroengine cooling blades. Aerosp. Sci. Technol. 2023, 138, 108325. [Google Scholar] [CrossRef]
- Li, X.-Q.; Song, L.-K.; Bai, G.-C.; Li, D.-G. Physics-informed distributed modeling for CCF reliability evaluation of aeroengine rotor systems. Int. J. Fatigue 2023, 167, 107342. [Google Scholar] [CrossRef]
- Bai, S.; Li, M.; Lu, Q.; Fu, J.; Li, J.; Qin, L. A new measuring method of dredging concentration based on hybrid ensemble deep learning technique. Measurement 2022, 188, 110423. [Google Scholar] [CrossRef]
- Petrucci, L.; Ricci, F.; Mariani, F.; Mariani, A. From real to virtual sensors, an artificial intelligence approach for the industrial phase of end-of-line quality control of GDI pumps. Measurement 2022, 199, 111583. [Google Scholar] [CrossRef]
- Pan, H.; Xu, H.; Liu, Q.; Zheng, J.; Tong, J. An intelligent fault diagnosis method based on adaptive maximal margin tensor machine. Measurement 2022, 198, 111337. [Google Scholar] [CrossRef]
- Abbas, A.T.; Pimenov, D.Y.; Erdakov, I.N.; Mikolajczyk, T.; Soliman, M.S.; El Rayes, M.M. Optimization of cutting conditions using artificial neural networks and the Edgeworth-Pareto method for CNC face-milling operations on high-strength grade-H steel. Int. J. Adv. Manuf. Technol. 2018, 105, 2151–2165. [Google Scholar] [CrossRef]
- Petrucci, L.; Ricci, F.; Mariani, F.; Cruccolini, V.; Violi, M. Engine Knock Evaluation Using a Machine Learning Approach; SAE Technical Paper No. 2020-24-0005; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Murugesan, S.; Srihari, S.; Senthilkumar, D. Investigation of Usage of Artificial Neural Network Algorithms for Prediction of In-Cylinder Pressure in Direct Injection Engines; SAE Technical Paper No. 2022-01-5089; SAE International: Warrendale, PA, USA, 2022. [Google Scholar]
- Jane, R.; James, C.; Rose, S.; Kim, T. Developing Artificial Intelligence (AI) and Machine Learning (ML) Based Soft Sensors for In-Cylinder Predictions with a Real-Time Simulator and a Crank Angle Resolved Engine Model; SAE Technical Paper No. 2023-01-0102; SAE International: Warrendale, PA, USA, 2023. [Google Scholar]
- Mariani, V.C.; Och, S.H.; Coelho, L.d.S.; Domingues, E. Pressure prediction of a spark ignition single cylinder engine using optimized extreme learning machine models. Appl. Energy 2019, 249, 204–221. [Google Scholar] [CrossRef]
- Ricci, F.; Petrucci, L.; Mariani, F. Hybrid LSTM + 1DCNN Approach to Forecasting Torque Internal Combustion Engines. Vehicles 2023, 5, 1104–1117. [Google Scholar] [CrossRef]
- Ricci, F.; Petrucci, L.; Mariani, F. NARX Technique to Predict Torque in Internal Combustion Engines. Information 2023, 14, 417. [Google Scholar] [CrossRef]
- ElSaid, A.; El Jamiy, F.; Higgins, J.; Wild, B.; Desell, T. Optimizing long short-term memory recurrent neural networks using ant colony optimization to predict turbine engine vibration. Appl. Soft Comput. 2018, 73, 969–991. [Google Scholar] [CrossRef]
- Lyu, Z.; Fang, Y.; Zhu, Z.; Jia, X.; Gao, X.; Wang, G. Prediction of acoustic pressure of the annular combustor using stacked long short-term memory network. Phys. Fluids 2022, 34, 054109. [Google Scholar] [CrossRef]
- Shin, S.; Won, J.-U.; Kim, M. Comparative research on DNN and LSTM algorithms for soot emission prediction under transient conditions in a diesel engine. J. Mech. Sci. Technol. 2023, 37, 3141–3150. [Google Scholar] [CrossRef]
- Norouzi, A.; Shahpouri, S.; Gordon, D.; Winkler, A.; Nuss, E.; Abel, D.; Andert, J.; Shahbakhti, M.; Koch, C.R. Deep learning based model predictive control for compression ignition engines. Control Eng. Pract. 2022, 127, 105299. [Google Scholar] [CrossRef]
- Gölc, M.; Sekmen, Y.; Erduranli, P.; Salman, M.S. Artificial Neural-Network Based Modeling of Variable Valve-Timing in a Spark-Ignition Engine. Appl. Energy 2005, 81, 187–197. [Google Scholar] [CrossRef]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A review of recurrent neural networks: LSTM cells and network architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Serkan, M.; Boashash, B.; Sodano, H.; Inman, D.J. Neurocomputing 1-D CNNs for structural damage detection: Verification on a structural health monitoring benchmark data. Neurocomputing 2018, 275, 1308–1317. [Google Scholar] [CrossRef]
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Inman, D. Structural damage detection in real time: Implementation of 1D convolutional neural networks for SHM applications. In Structural Health Monitoring & Damage Detection, Proceedings of the Thirty-Fifth IMAC, a Conference and Exposition on Structural Dynamics, 2017; Niezrecki, C., Ed.; Springer International Publishing: Cham, Switzerland, 2017; Volume 7, pp. 49–54. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Avci, O.; Abdeljaber, O.; Ince, T.; Gabbouj, M.; Inman, D.J. 1D convolutional neural networks and applications: A survey. Mech. Syst. Signal Process. 2021, 151, 107398. [Google Scholar] [CrossRef]
- Fukuoka, R.; Suzuki, H.; Kitajima, T.; Kuwahara, A.; Yasuno, T. Wind speed prediction model using LSTM and 1D-CNN. J. Signal Process. 2018, 22, 207–210. [Google Scholar] [CrossRef]
- Rosato, A.; Araneo, R.; Andreotti, A.; Succetti, F.; Panella, M. 2-D convolutional deep neural network for the multivariate prediction of photovoltaic time series. Energies 2021, 14, 2392. [Google Scholar] [CrossRef]
- Kaššay, P. Torsional natural frequency tuning by means of pneumatic flexible shaft couplings. Sci. J. Silesian Univ. Technol. Ser. Transp. 2015, 89, 57–60. [Google Scholar] [CrossRef]
- Nawae, W.; Thongpull, K. PMSM torque estimation based on machine learning techniques. In Proceedings of the 2020 International Conference on Power, Energy and Innovations (ICPEI), Chiangmai, Thailand, 14–16 October 2020; pp. 137–140. [Google Scholar]
- Tang, S.; Ghorbani, A.; Yamashita, R.; Rehman, S.; Dunnmon, J.A.; Zou, J.; Rubin, D.L. Data valuation for medical imaging using Shapley value and application to a large-scale chest X-ray dataset. Sci. Rep. 2021, 11, 8366. [Google Scholar] [CrossRef]
- Hart, S. “Shapley Value”. Game Theory; Palgrave Macmillan: London, UK, 1989; pp. 210–216. [Google Scholar]
- Cui, Y.; Liu, H.; Wang, Q.; Zheng, Z.; Wang, H.; Yue, Z.; Ming, Z.; Wen, M.; Feng, L.; Yao, M. Investigation on the ignition delay prediction model of multi-component surrogates based on back propagation (BP) neural network. Combust. Flame 2022, 237, 111852. [Google Scholar] [CrossRef]
- Wright, L.G.; Onodera, T.; Stein, M.M.; Wang, T.; Schachter, D.T.; Hu, Z.; McMahon, P.L. Deep physical neural networks trained with backpropagation. Nature 2022, 601, 549–555. [Google Scholar] [CrossRef]
- Singh, A.; Kushwaha, S.; Alarfaj, M.; Singh, M. Comprehensive overview of backpropagation algorithm for digital image denoising. Electronics 2022, 11, 1590. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Displacement | 999 cc |
| Cylinders | 3 Cyl./4 V per Cyl. |
| Bore | 72 mm |
| Stroke | 81.8 mm |
| Compression ratio | 10:1 |
| Power | 84 CV at 5250 rpm |
| Torque | 120 Nm at 3250 rpm |
| Engine Speedavg [rpm] | IMEPavg [bar] | CoVIMEP [%] | Torqueavg [Nm] |
|---|---|---|---|
| 1500 | 10.18 | 0.46 | 77 |
| 3250 | 14.15 | 2.13 | 111 |
| 2500 | 11.35 | 15.05 | 83 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ricci, F.; Petrucci, L.; Mariani, F.; Grimaldi, C.N. Investigation of a Hybrid LSTM + 1DCNN Approach to Predict In-Cylinder Pressure of Internal Combustion Engines. Information 2023, 14, 507. https://doi.org/10.3390/info14090507
Ricci F, Petrucci L, Mariani F, Grimaldi CN. Investigation of a Hybrid LSTM + 1DCNN Approach to Predict In-Cylinder Pressure of Internal Combustion Engines. Information. 2023; 14(9):507. https://doi.org/10.3390/info14090507
Chicago/Turabian StyleRicci, Federico, Luca Petrucci, Francesco Mariani, and Carlo Nazareno Grimaldi. 2023. "Investigation of a Hybrid LSTM + 1DCNN Approach to Predict In-Cylinder Pressure of Internal Combustion Engines" Information 14, no. 9: 507. https://doi.org/10.3390/info14090507