
Towards a Model-Based Multi-Layered Approach to Describe Traffic Scenarios on a Technical Level


Abstract
:1. Introduction
2. Method
3. Requirements for the Modeling of Traffic Scenarios
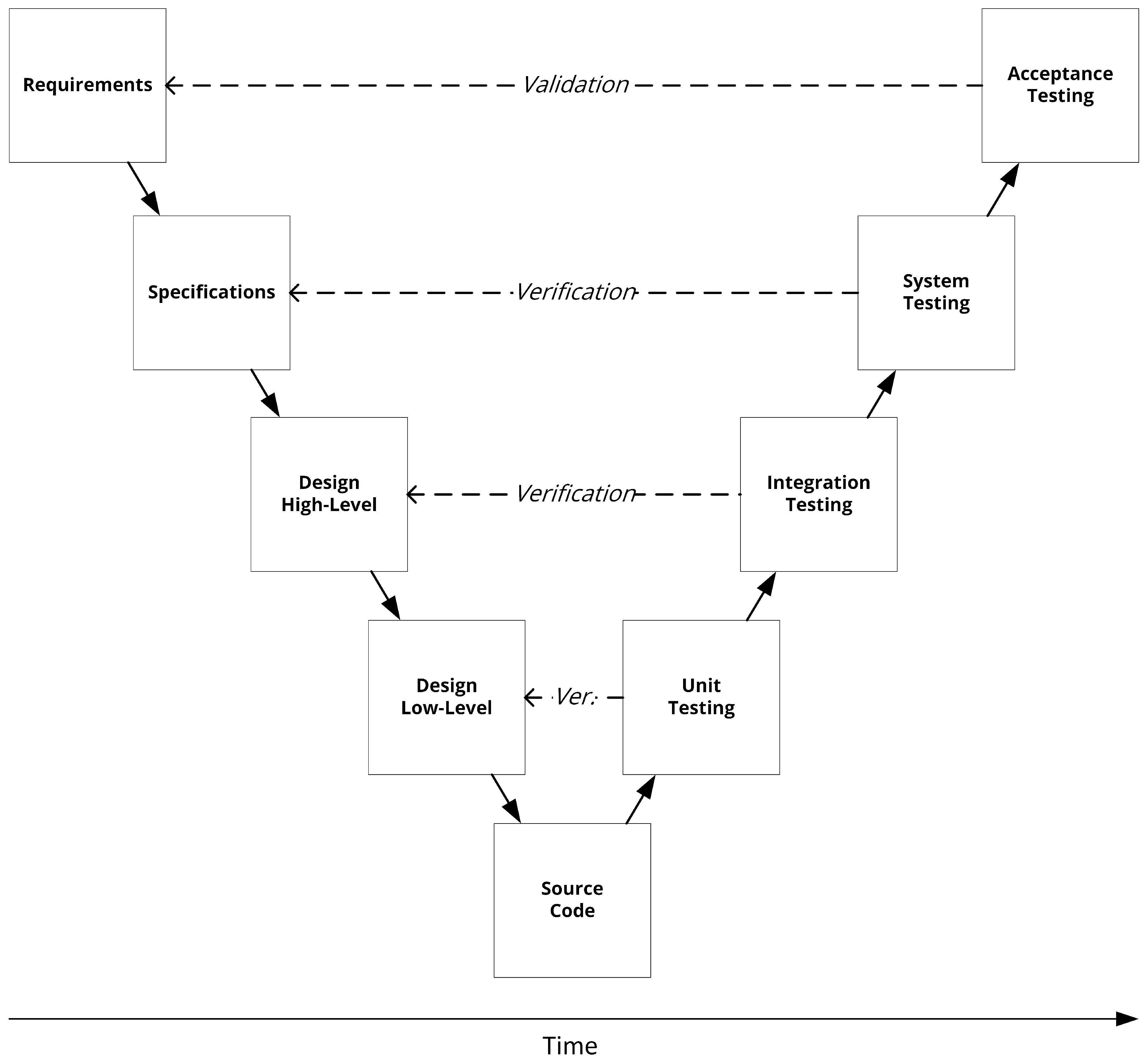
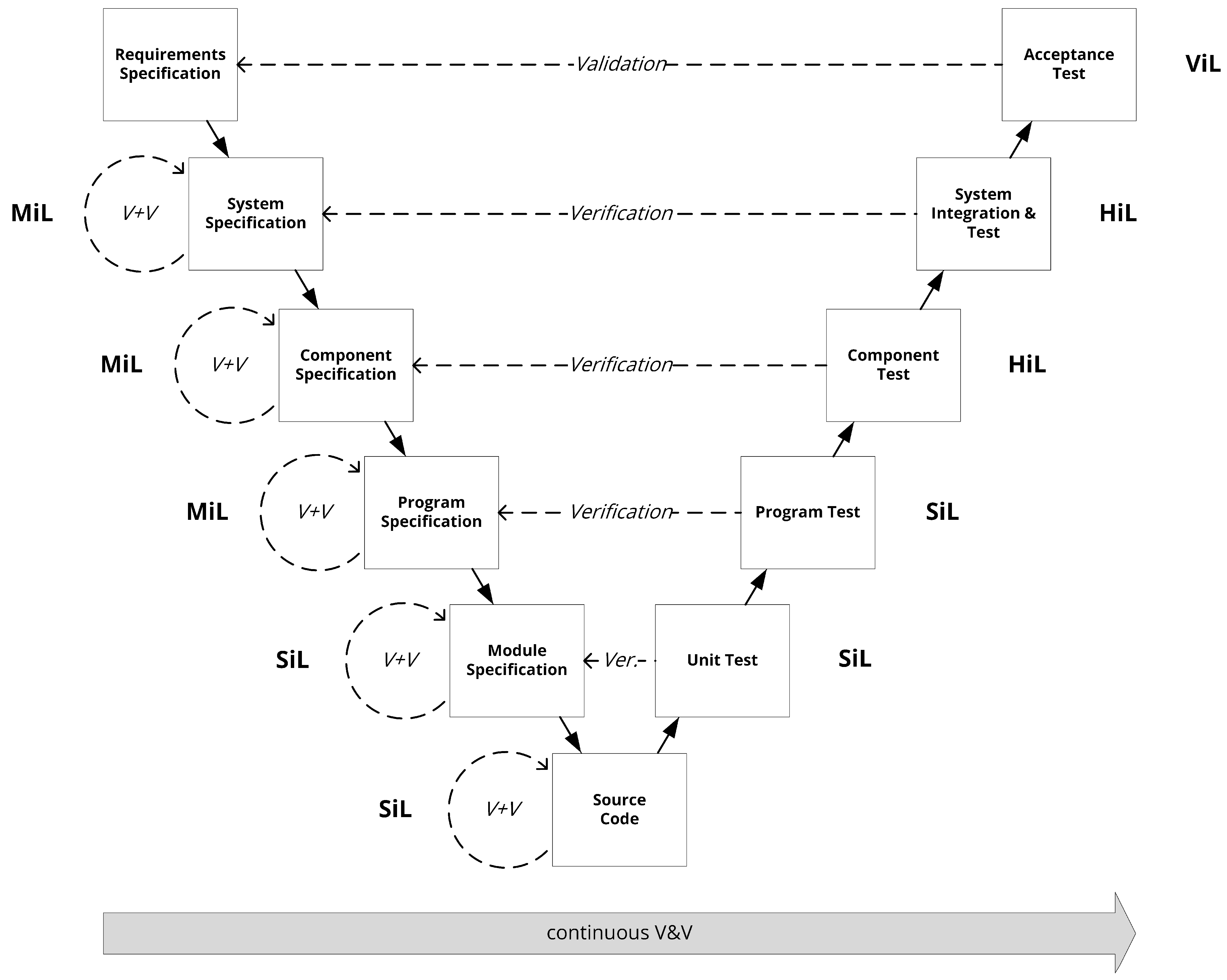
3.1. Continuous V&V in Transportation Systems Engineering
3.2. Interoperability

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MiL | SiL | HiL | ViL | |
|---|---|---|---|---|
| System Level | X | X | ||
| Subsystem Level | X | X | X | |
| Component Level | X | X | X | |
| Program-Unit Level | X |
3.3. Varying Abstraction Levels of Simulated Traffic Participants
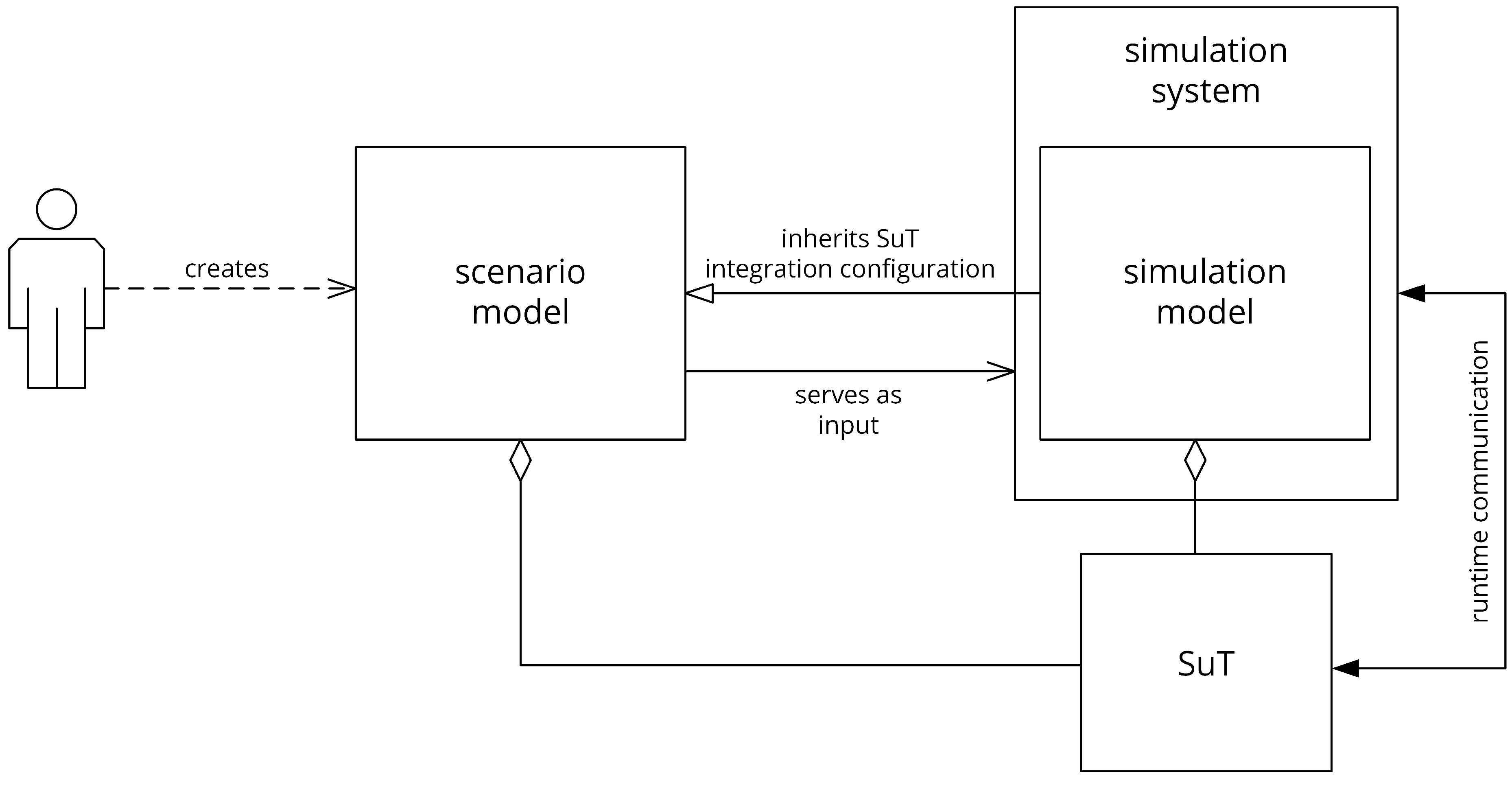
3.4. Early SuT Integration
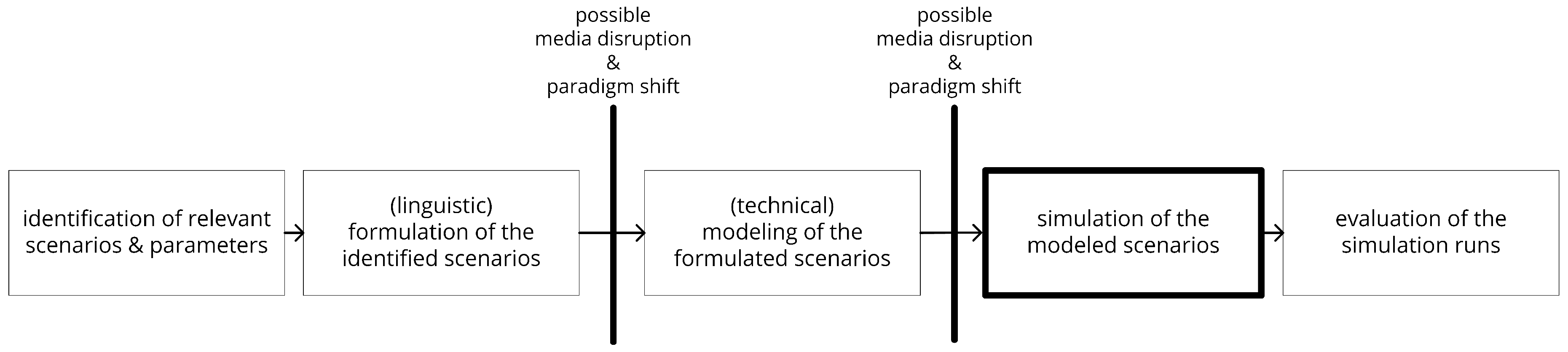
3.5. Holistic View on Scenario-Based Simulation
3.6. Requirements Summary
- The scenario model should be built upon an extensible and customizable foundation so that it can be applied to the different needs of different transportation domains and across the entire V&V process.
- The scenario model should create the possibility to integrate the SuT seamlessly as part of the scenario at the earliest stage possible without the need to adapt the configuration of the executing simulation system itself.
- The scenario model should pursue a holistic approach reaching from the scenario modeling all the way to executing the simulation in order to reduce media disruptions and paradigm shifts within the simulative V&V process.
4. Related Work
4.1. Simulation Systems
4.1.1. Open Simulation Platform
4.1.2. HAGGIS
4.1.3. CARLA Open Urban Driving Simulator
4.1.4. LG Silicon Valley Lab Simulator
4.2. Scenario Description
4.2.1. ASAM OpenDRIVE®, OpenCRG®, OpenSCENARIO®
4.2.2. Traffic Sequence Charts
4.2.3. SCENIC
5. Model-Based Multi-Layered Approach
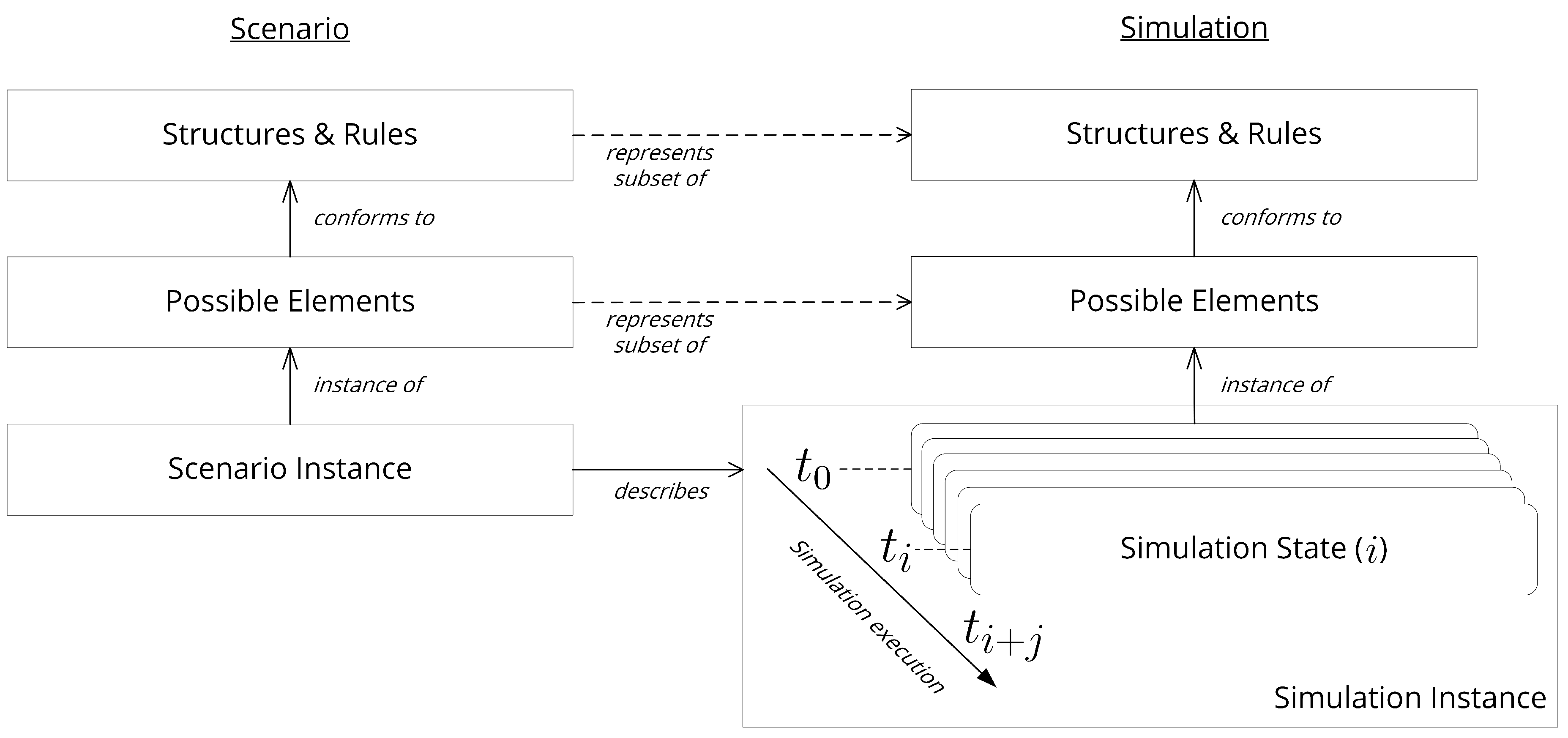
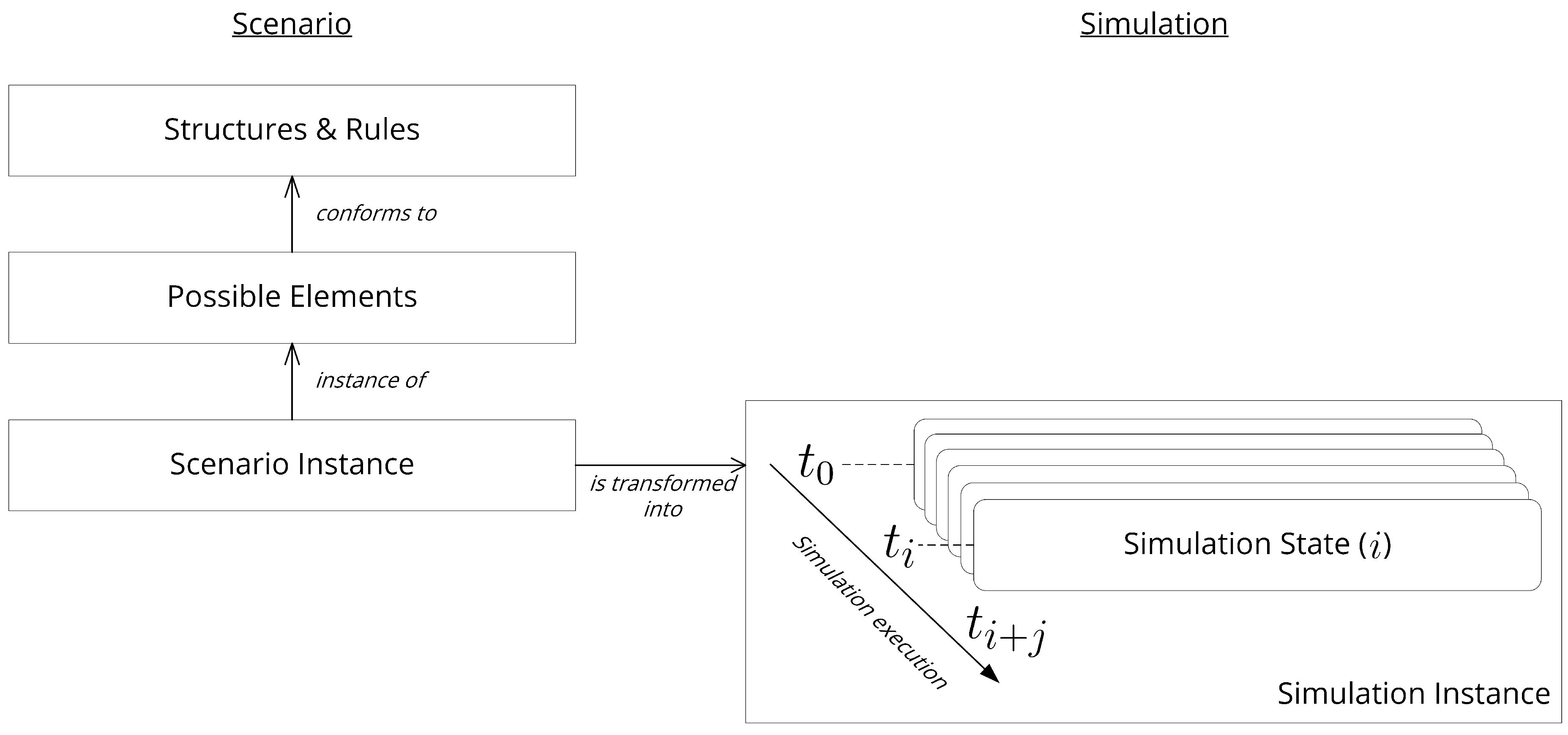
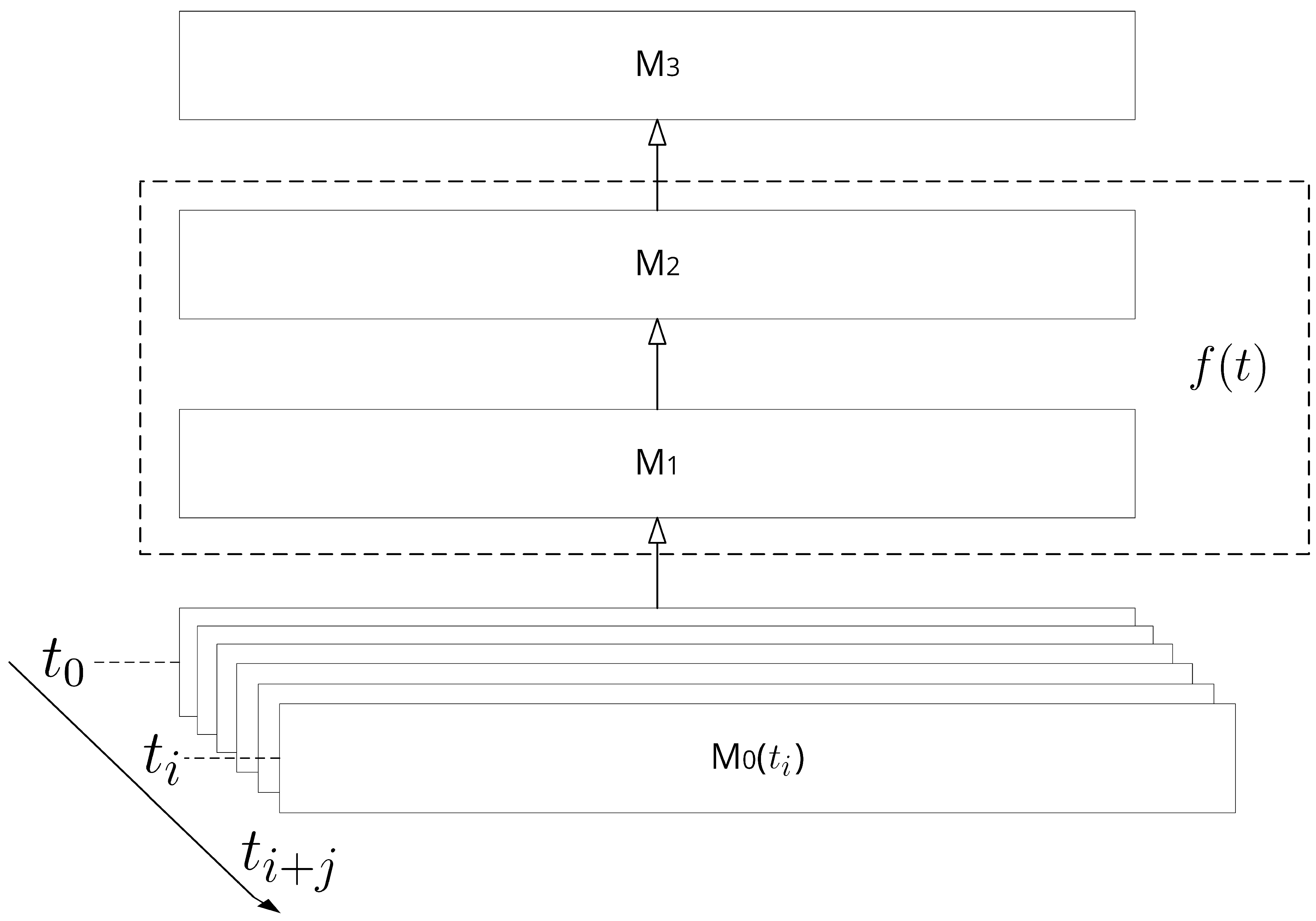
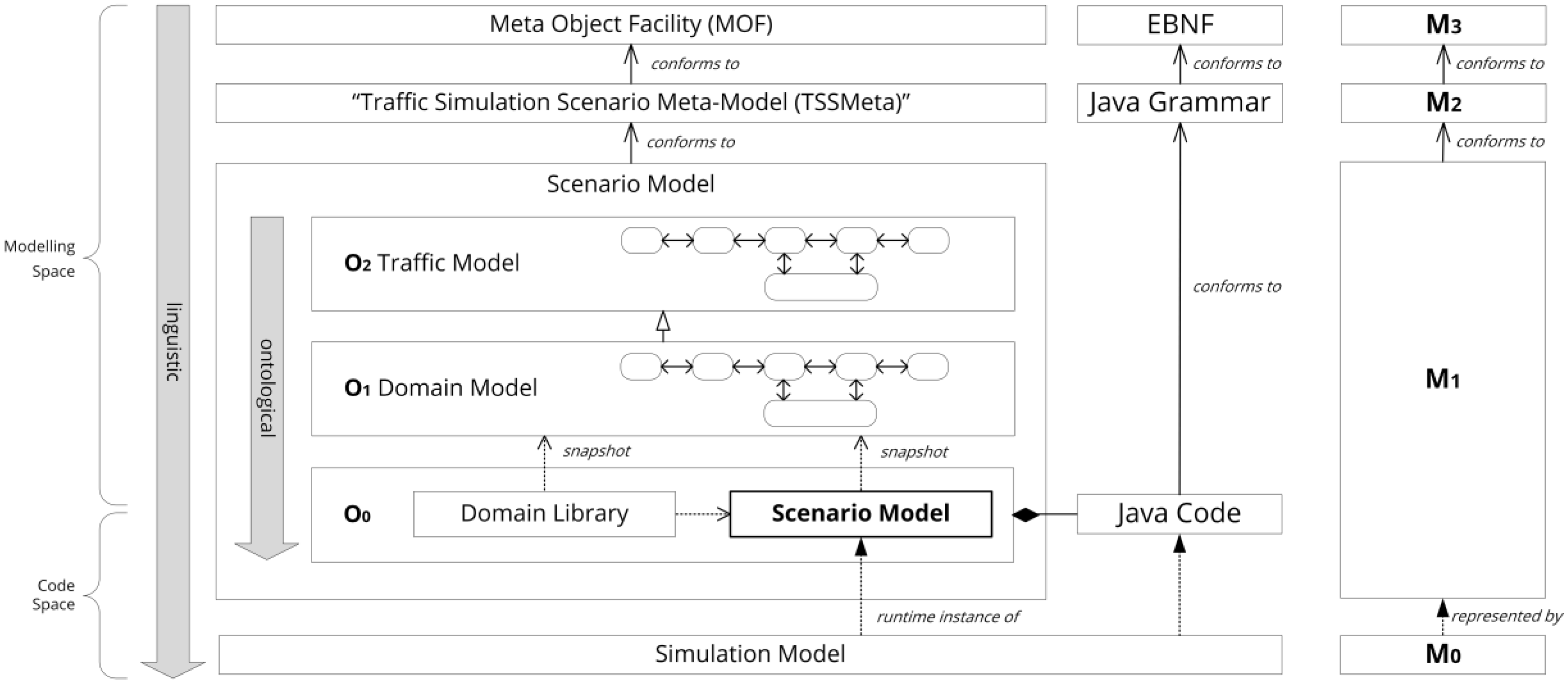
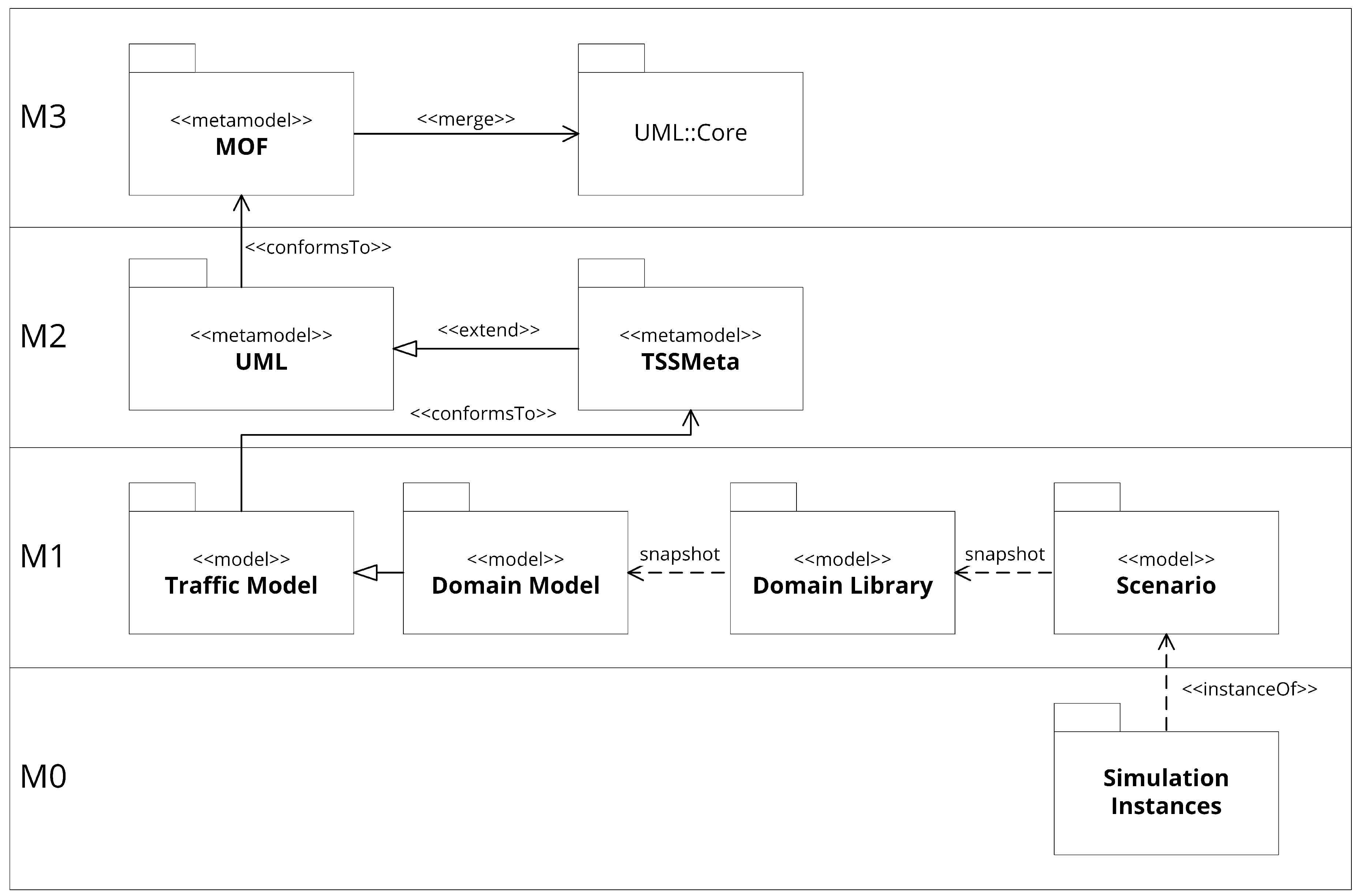
5.1. Model-Driven Simulation
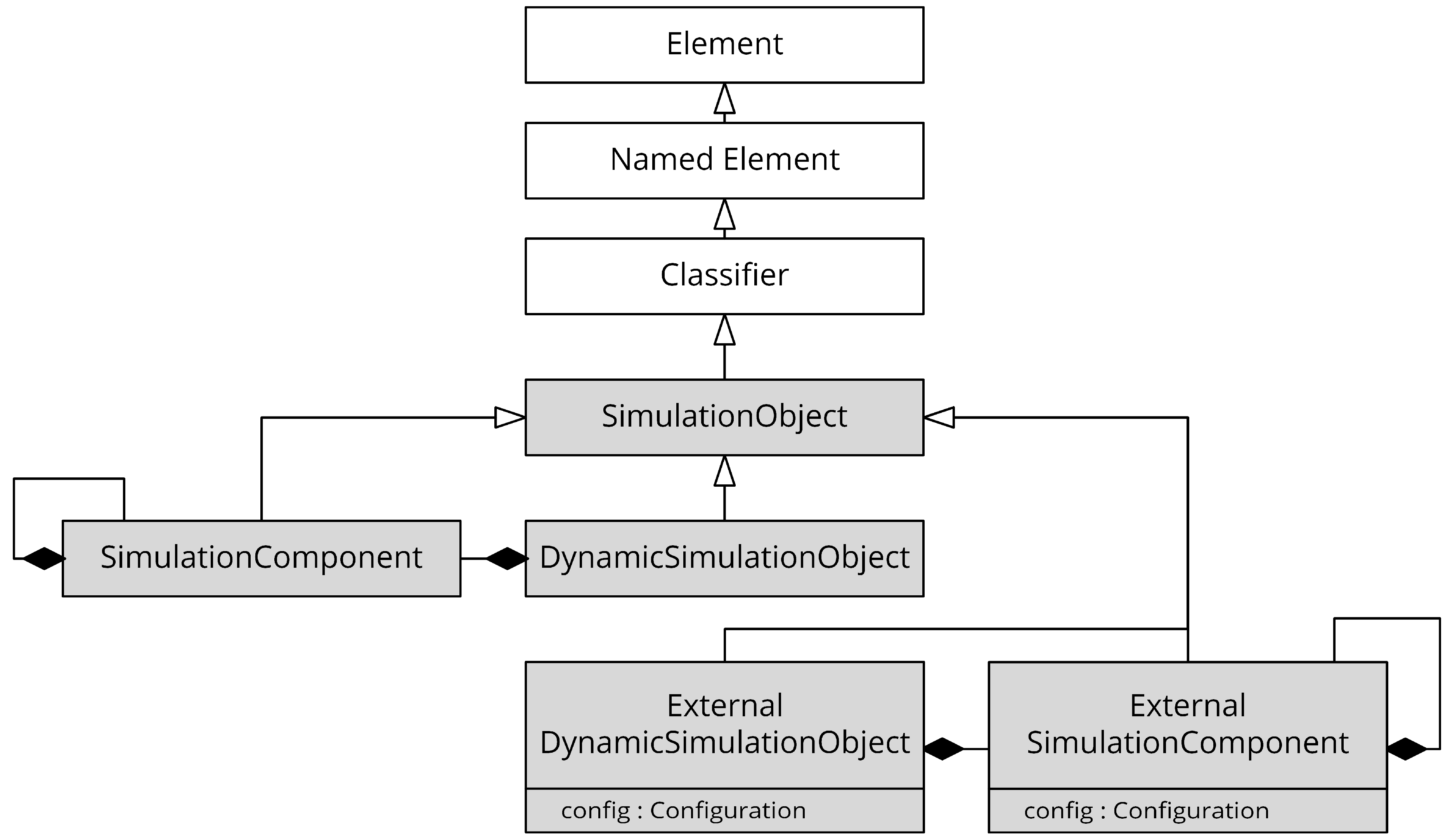
5.2. Nested Simulation Objects
- DynamicSimulationObject: Represents an entity of the simulation, which has inputs and outputs. It can therefore perceive and influence the simulation environment.
- SimulationComponent: Represents a component, which is part of a DynamicSimulationObject. Has inputs and outputs that are linked to those of the parent object. SimulationComponents can be further nested analogous to the embedding in a DynamicSimulationObject.
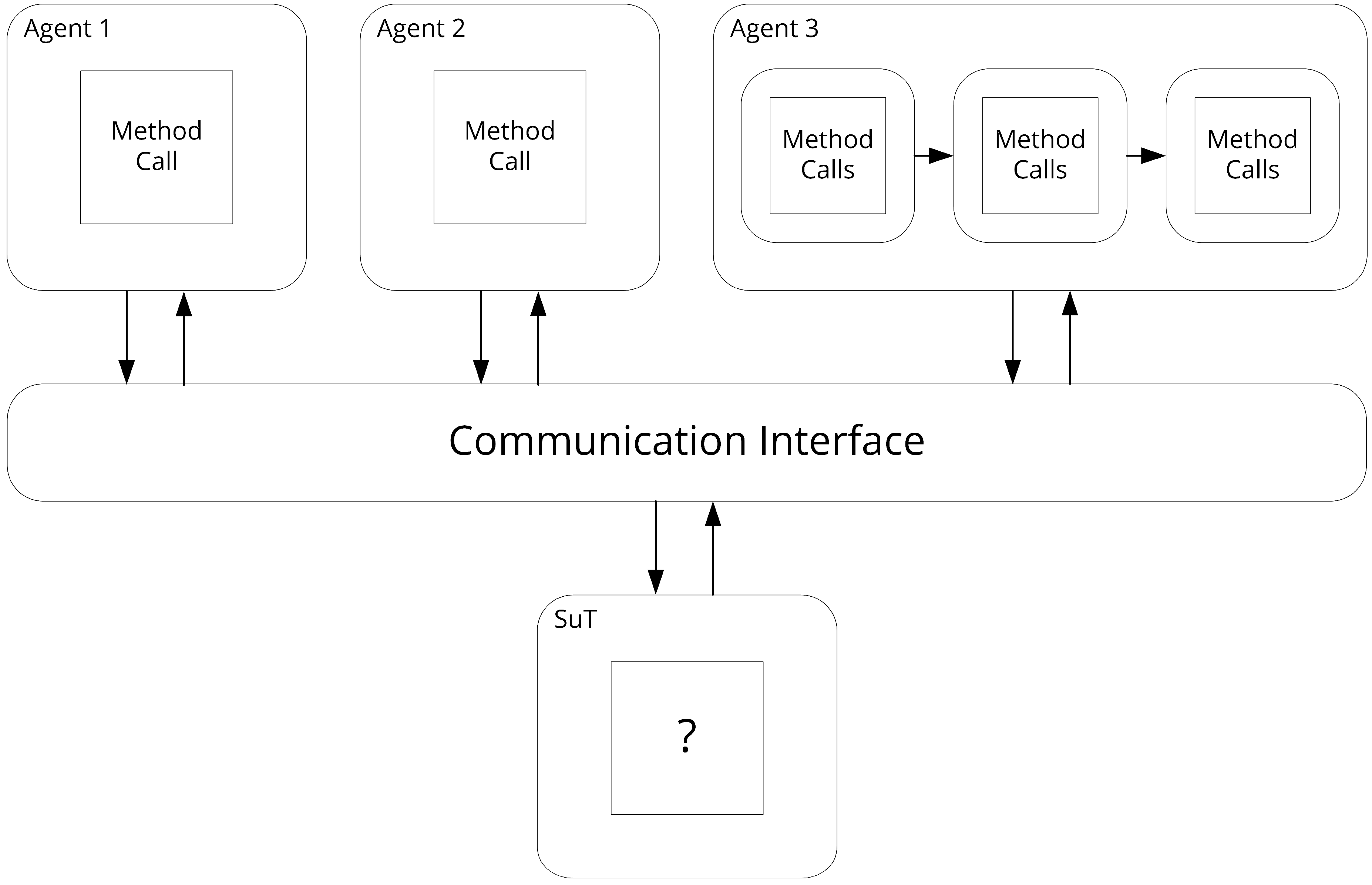
- ExternalDynamicSimulationObject: Represents a whole entity of the simulation, but instead of holding its own logic, it is only a wrapper in the sense of also having inputs and outputs, but not holding some internal logic and instead routing the in- and outputs to and from an external system or model via configuration options. In this way, a system to be tested can be integrated into the scenarios and thus also into the simulation runs, independent of its location.
- ExternalSimulationComponent: Represents a component like the SimulationComponent, but in the manner of a wrapper like the ExternalDynamicSimulationObject.
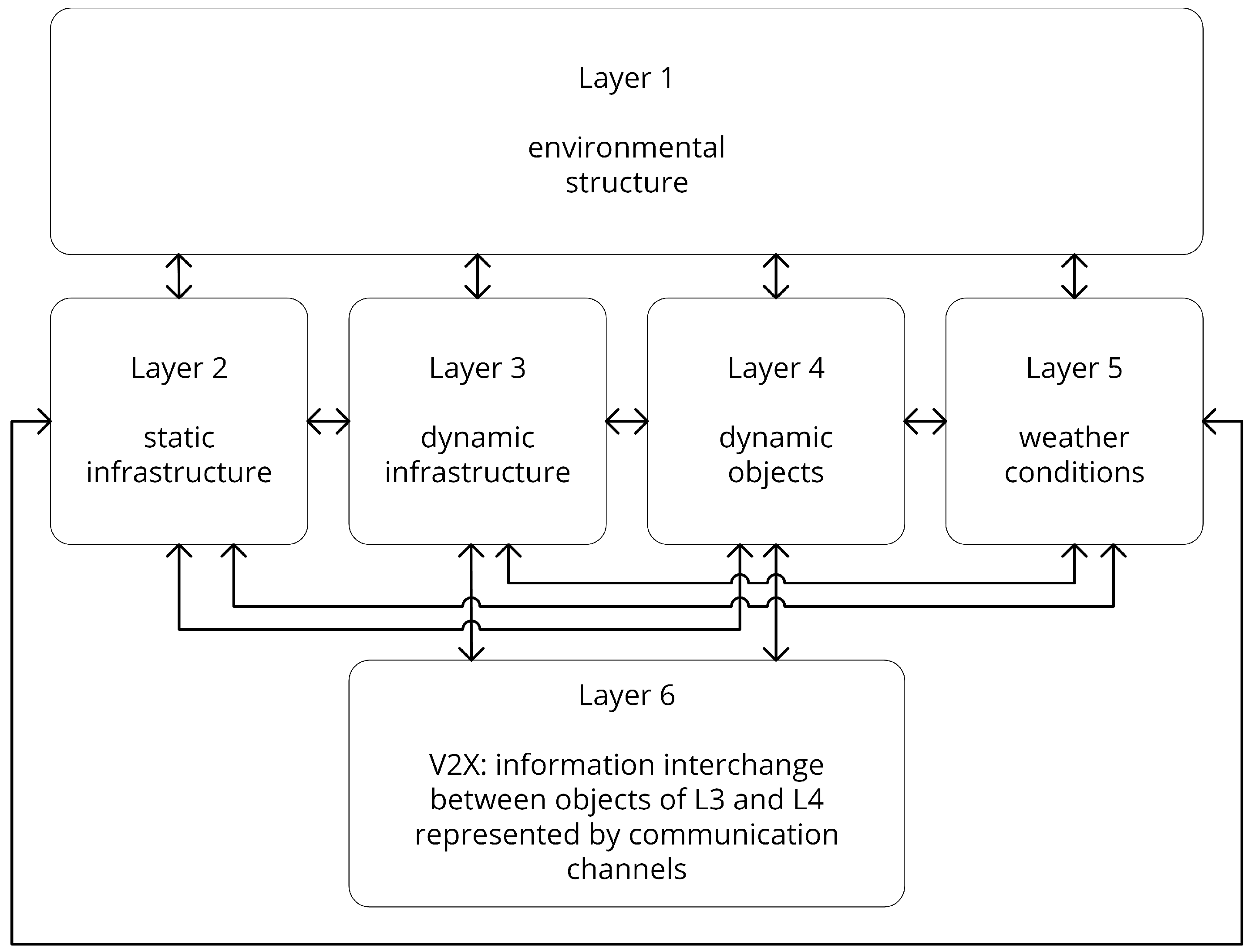
5.3. Organizing the Scenario Model
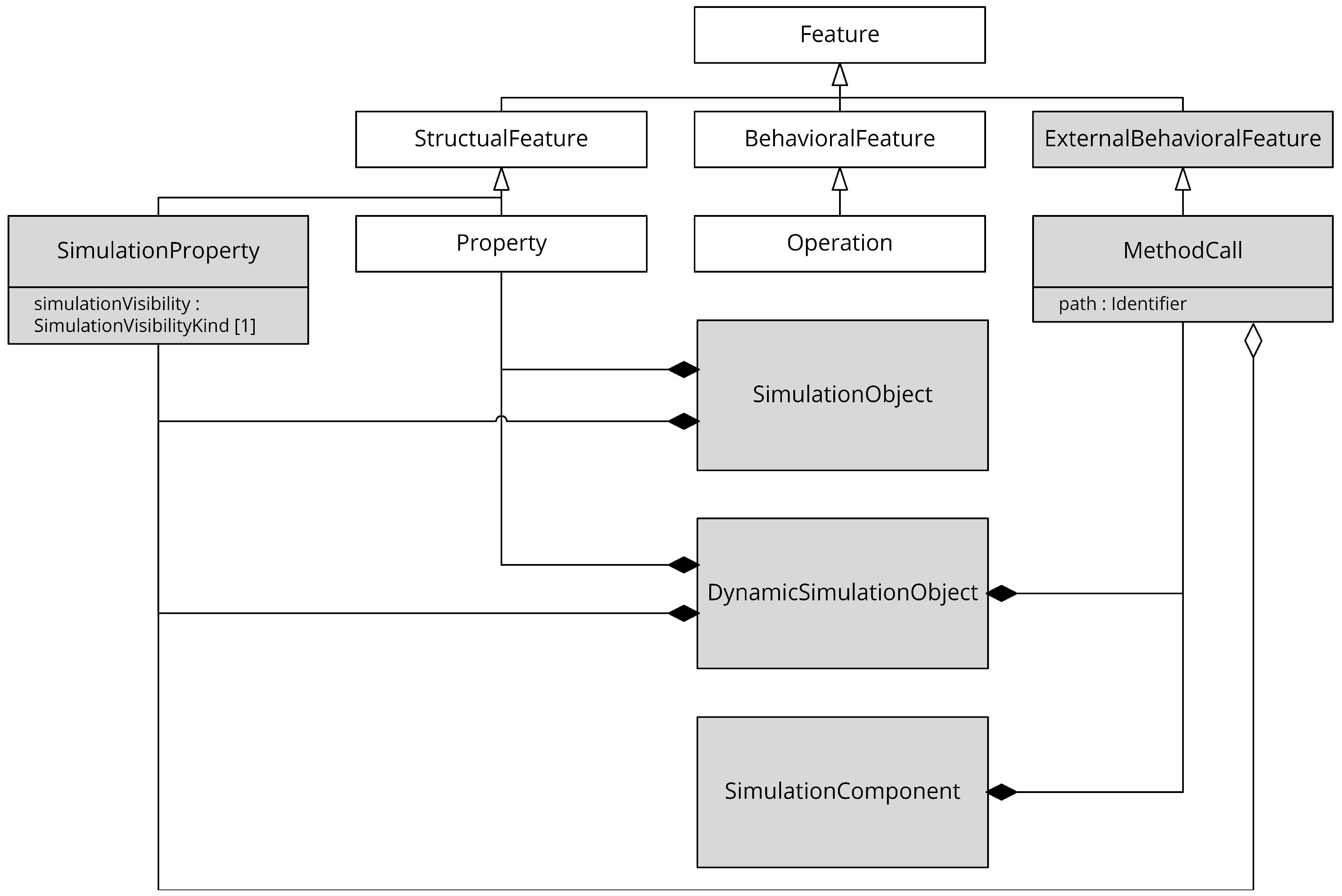
5.4. Intra-Layer Ontologies
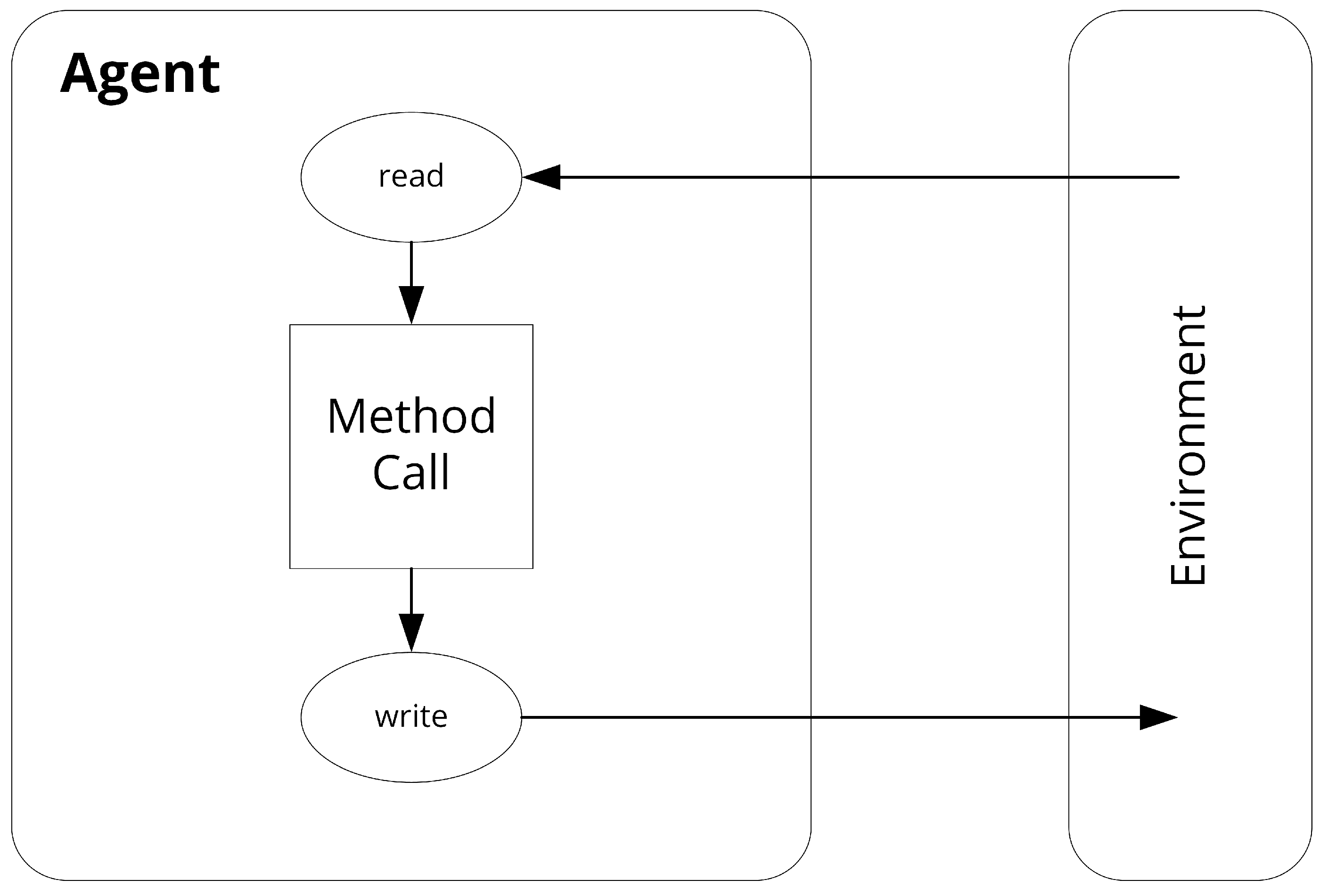
5.5. Code-Integration
5.6. Merging the Concepts
6. Application
6.1. UML Metamodel Extension
6.2. Traffic Simulation Scenario Metamodel




6.3. Modeling of a Simple Maritime Scenario
7. Discussion
8. Conclusions and Outlook
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bräuninger, M.; Fiedler, R.; Friedrich, T.; Küchle, J.; Maatsch, S.; Schlennstedt, J.; Stiller, S.; Teuber, M.-O. Volks-Wirtschaftliche Bedeutung des Hamburger Hafens: Untersuchung der Regional—Und Gesamtwirtschaftlichen Bedeutung des Hamburger Hafens [Economic Significance of the Port of Hamburg: Investigation of the Regional and Overall Economic Significance of the Port of Hamburg]; Institute of Shipping Economics and Logistics: Hamburg, Germany, 2021; Available online: https://www.hamburg-port-authority.de/fileadmin/user_upload/BeschaeftigungsstudieHafenHamburg2019_Endbericht_final.pdf (accessed on 1 April 2021).
- Lemper, B.; Maatsch, S.; Fiedler, R.; Bräuninger, M.; Holocher, K.-H. Untersuchung der Volkswirtschaftlichen Bedeutung der Deutschen See—Und Binnenhäfen auf Grundlage Ihrer Beschäftigungswirkung. Final Report [Investigation of the Economic Importance of German Sea and Inland Ports Based on Their Effect on Employment]; Federal Ministry of Transport and Digital Infrastructure: Bremen, Germany, 2019; Available online: https://www.isl.org/public/studienergebnisse/Beschaeftigungseffekte_BMVI_Endbericht5-Final.pdf (accessed on 18 April 2021).
- International Maritime Organization. Maritime Safety Committee (MSC): 100th Session, 3–7 December 2018; International Maritime Organization (IMO): London, UK, 2018; Available online: https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/MSC-100th-session.aspx (accessed on 15 December 2020).
- Lenz, B.; Fraedrich, E. Gesellschaftliche und Individuelle Akzeptanz des Autonomen Fahrens [Social and individual acceptance of autonomous driving]. In Autonomes Fahren: Technische, Rechtliche und Gesellschaftliche Aspekte; Maurer, M., Gerdes, J.C., Lenz, B., Winner, H., Eds.; Springer: Berlin, Germany, 2015; pp. 639–660. [Google Scholar]
- SAE International. Taxonomy and Definitions for Terms Related to on-Road Motor Vehicle Automated Driving Systems: J3016, 2018. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 9 December 2020).
- Federal Ministry for Economic Affairs and Energy. Pegasus Method: An Overview. Germany, 2019. Available online: https://www.pegasusprojekt.de/files/tmpl/Pegasus-Abschlussveranstaltung/PEGASUS-Gesamtmethode.pdf (accessed on 10 December 2020).
- Brinkmann, M.; Bode, E.; Lamm, A.; Maelen, S.V.; Hahn, A. Learning from automotive: Testing maritime assistance systems up to autonomous vessels. In OCEANS 2017—Aberdeen; IEEE: Piscataway, NJ, USA, 2017; pp. 1–8. [Google Scholar] [CrossRef]
- International Organization for Standardization (ISO). Ships and Marine Technology—Computer Applications—General Principles for the Development and Use of Programmable Electronic Systems in Marine Applications: ISO 17894:2005, 2005. Available online: https://www.iso.org/standard/31619.html (accessed on 15 April 2021).
- Rüssmeier, N.; Lamm, A.; Hahn, A. A generic testbed for simulation and physical-based testing of maritime cyber-physical system of systems. In Proceedings of the International Maritime and Port Technology and Development Conference and International Conference on Maritime Autonomous Surface Ships, Trondheim, Norway, 13–14 November 2019; Volume 1357, p. 012025. [Google Scholar] [CrossRef]
- Wachenfeld, W.; Winner, H. Die Freigabe des Autonomen Fahrens [The approval of autonomous driving]. In Autonomes Fahren: Technische, Rechtliche und Gesellschaftliche Aspekte; Maurer, M., Gerdes, J.C., Lenz, B., Winner, H., Eds.; Springer: Berlin, Germany, 2015; pp. 439–464. [Google Scholar]
- Lamm, A.; Hahn, A. Towards critical-scenario based testing with maritime observation data. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar] [CrossRef]
- Akkermann, A.; Hjollo, B.A. Scenario-based V&V in a maritime co-simulation framework. In Proceedings of the 2019 Spring Simulation Conference (SpringSim), Tucson, AZ, USA, 29 April–2 May 2019; pp. 1–12. [Google Scholar] [CrossRef]
- Hanke, T. Virtual Sensorics: Simulated Environmental Perception for Automated Driving Systems. Dissertation Thesis, Technische Universität München (TUM), München, Germany, 2020. Available online: http://nbn-resolving.de/urn/resolver.pl?urn:nbn:de:bvb:91-diss-20200529-1519952-1-7 (accessed on 18 February 2021).
- Ulbrich, S.; Menzel, T.; Reschka, A.; Schuldt, F.; Maurer, M. Defining and substantiating the terms scene, situation, and scenario for automated driving. In Proceedings of the 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 982–988. [Google Scholar] [CrossRef]
- Wuellner, T.; Feuerstack, S.; Hahn, A. Clustering environmental conditions of historical accident data to efficiently generate testing sceneries for maritime systems. In Model-Based Safety and Assessment; Papadopoulos, Y., Aslansefat, K., Katsaros, P., Bozzano, M., Eds.; Springer: Berlin, Germany, 2019; pp. 349–362. [Google Scholar]
- Ding, W.; Chen, B.; Xu, M.; Zhao, D. Learning to collide: An adaptive safety-critical scenarios generating method. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 2243–2250. [Google Scholar] [CrossRef]
- International Organization for Standardization (ISO) Road Vehicles—Functional Safety ISO/FDIS 26262, 2018. Available online: https://www.iso.org/standard/68383.html (accessed on 16 April 2021).
- Balaji, S.; Sundararajan Murugaiyan, M. Waterfall vs. v-model vs. agile: A comparative study on SDLC. Int. J. Inf. Technol. 2012, 2, 26–30. [Google Scholar]
- International Organization for Standardization (ISO); International Electrotechnical Commission (IEC); Institute of Electrical and Electronics Engineers (IEEE). Systems and Software Engineering—Systems Life Cycle Processes: ISO/IEC/IEEE 15288:2015, 2015. Available online: https://www.iso.org/standard/63711.html (accessed on 22 April 2021).
- Koopman, P.; Wagner, M. Challenges in autonomous vehicle testing and validation. SAE Int. J. Transp. Saf. 2016, 4, 15–24. [Google Scholar] [CrossRef] [Green Version]
- Brinkmann, M. Physikalische Testfeld-Architektur für die Unterstützung der Entwicklung von Automatisierten Schiffsfüh-Rungssystemen [Physical Test Bed Architecture to Support the Development of Automated Ship Piloting Systems]. Dissertation Thesis, Carl von Ossietzky Universität Oldenburg, Oldenburg, Niedersachsen, Germany, 2018. [Google Scholar]
- Brinkmann, M.; Hahn, A. Testbed architecture for maritime cyber physical systems. In Proceedings of the 2017 IEEE 15th International Conference on Industrial Informatics (INDIN), Emden, Germany, 24–26 July 2017. [Google Scholar]
- Pfeffer, R.; Leichsenring, T. Continuous Development of highly automated driving functions with vehicle-in-the-loop using the example of euro NCAP scenarios. In Simulation and Testing for Vehicle Technology; Gühmann, C., Riese, J., von Rüden, K., Eds.; Springer: Berlin, Germany, 2016; pp. 33–42. [Google Scholar] [CrossRef]
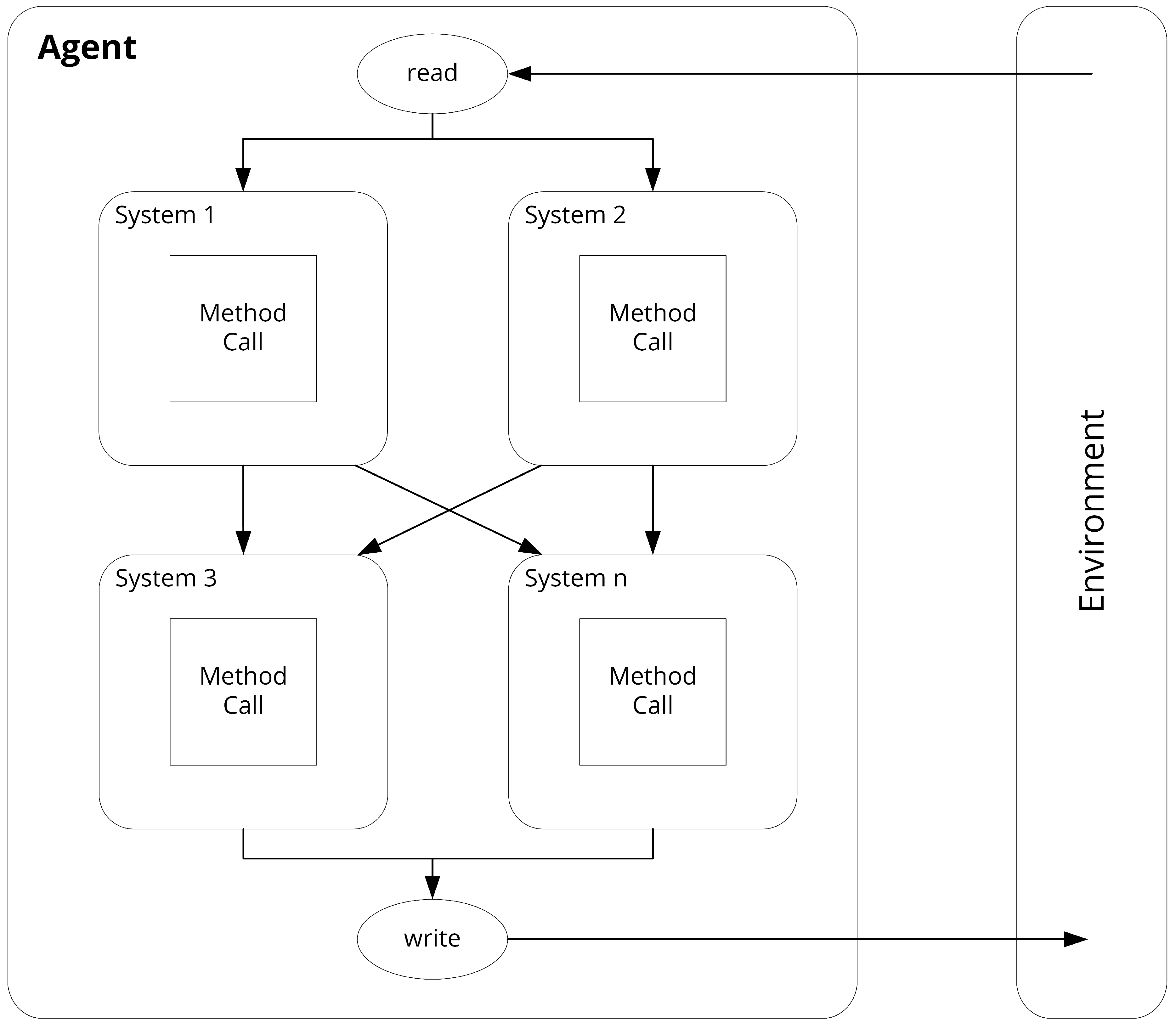
- Ghadai, P.; Shree, L.P.; Chhatria, L.; Prasad, R. A study on agent based modelling for traffic simulation. Int. J. Comput. Sci. Inf. Technol. 2016, 7, 932–936. [Google Scholar]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Pearson: London, UK, 2016. [Google Scholar]
- Steidel, M.; Hahn, A. MTCAS—An assistance system for collision avoidance at sea. In Proceedings of the 18th International Conference on Computer and IT Applications in the Maritime Industries, Tullamore, Ireland, 25–27 March 2019. [Google Scholar]
- Maier, M.W. Architecting principles for systems-of-systems. Syst. Eng. 1998, 1, 267–284. [Google Scholar] [CrossRef]
- International Organization for Standardization (ISO); International Electrotechnical Commission (IEC); Institute of Electrical and Electronics Engineers (IEEE). Systems and Software Engineering—Software Life Cycle Processes: ISO/IEC/IEEE 12207, 2017. Available online: https://www.iso.org/standard/63712.html (accessed on 14 April 2021).
- Weber, N.; Frerichs, D.; Eberle, U. A simulation-based, statistical approach for the derivation of concrete scenarios for the release of highly automated driving functions. In Proceedings of the GMM-Fachbericht 95: Automotive meets Electronics Beiträge, Dortmund, Germany, 10–11 March 2020; Volume 95, pp. 116–121. [Google Scholar] [CrossRef]
- Fremont, D.J.; Kim, E.; Pant, Y.V.; Seshia, S.A.; Acharya, A.; Bruso, X.; Wells, P.; Lemke, S.; Lu, Q.; Mehta, S. Formal scenario-based testing of autonomous vehicles: From simulation to the real world. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Smogeli, Ø.R.; Ludvigsen, K.B.; Jamt, L.; Vik, B.; Nordahl, H.; Kyllingstad, L.T.; Yum, K.K.; Zhang, H. Open simulation platform—An open-source project for maritime system co-simulation. In Proceedings of the 19th International Conference on Computer and IT Applications in the Maritime Industries: COMPIT’20, Pontignano, Italy, 17–19 August 2020; pp. 239–253. [Google Scholar]
- OSP Interface Specification: OSP-IS 1.0., 2020. Available online: https://opensimulationplatform.com/assets/osp-is-1.0.pdf (accessed on 19 November 2020).
- Hahn, A.; Noack, T. eMaritime integrated reference platform. In Proceedings of the Deutscher Luft—und Raumfahrtkongress 2016. Deutsche Gesellschaft für Luft—und Raumfahrt—Lilienthal-Oberth e.V., Braunschweig, Germany, 13–15 September 2016; Available online: http://www.dglr.de/publikationen/2016/420297.pdf (accessed on 29 April 2021).
- Schweigert, S.; Gollücke, V.; Hahn, A.; Bolles, A. Haggis: A modelling and simulation platform for e-maritime technology assessment. In Proceedings of the INT-NAM 2014, 2nd International Symposium on Naval Architecture and Maritime, Istanbul, Turkey, 23–24 October 2014; pp. 733–742. [Google Scholar]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. In Proceedings of the 1st Annual Conference on Robot Learning, Mountain View, CA, USA, 13–15 November 2017; Volume 78, pp. 1–16. Available online: http://proceedings.mlr.press/v78/dosovitskiy17a.html (accessed on 12 March 2021).
- Zapridou, E.; Bartocci, E.; Katsaros, P. Runtime verification of autonomous driving systems in CARLA. In LNCS Sublibrary: SL2—Programming and Software Engineering; Deshmukh, J., Ničković, D., Eds.; Springer: Berlin, Germany, 2020; Volume 12399, pp. 172–183. [Google Scholar]
- Rong, G.; Shin, B.H.; Tabatabaee, H.; Lu, Q.; Lemke, S.; Mozeiko, M.; Boise, E.; Uhm, G.; Gerow, M.; Mehta, S.; et al. LGSVL simulator: A high fidelity simulator for autonomous driving. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Foretellix Ltd. Measurable Scenario Description Language Reference, version 20.10; Foretellix Ltd: Tel Aviv, Israel, 2020; Available online: https://www.foretellix.com/open-language/ (accessed on 29 April 2021).
- Association for Standardization of Automation and Measuring Systems. ASAM SIM Guide: Standardization for Highly Automated Driving; ASAM e.V.: Höhenkirchen-Siegertsbrunn, Germany, 2021. [Google Scholar]
- Association for Standardization of Automation and Measuring Systems. In ASAM OpenSCENARIO V1.1.0 User Guide; ASAM e.V.: Höhenkirchen-Siegertsbrunn, Germany, 2021; Available online: https://www.asam.net/standards/detail/openscenario/ (accessed on 29 April 2021).
- Damm, W.; Kemper, S.; Möhlmann, E.; Peikenkamp, T.; Rakow, A. Using traffic sequence charts for the development of HAVs. In Proceedings of the SEE & 3AF (Chairs), ERTS 2018, Toulouse, France, January 2018; Available online: https://hal.archives-ouvertes.fr/hal-01714060 (accessed on 14 August 2020).
- Damm, W.; Möhlmann, E.; Peikenkamp, T.; Rakow, A. A formal semantics for traffic sequence charts. In Lecture Notes in Computer Science. Principles of Modeling; Lohstroh, M., Derler, P., Sirjani, M., Eds.; Springer: Berlin, Germany, 2018; pp. 182–205. [Google Scholar]
- Fremont, D.J.; Dreossi, T.; Ghosh, S.; Yue, X.; Sangiovanni-Vincentelli, A.L.; Seshia, S.A. Scenic: A language for scenario specification and scene generation. In Proceedings of the 40th ACM SIGPLAN Conference on Programming Language Design and Implementation, Phoenix, AZ, USA, 22–26 June 2019; pp. 63–78. [Google Scholar] [CrossRef] [Green Version]
- Object Management Group. Model Driven Architecture (MDA): MDA Guide Rev. 2.0 (OMG Document ormsc/2014-06-01), 2014. Available online: https://www.omg.org/cgi-bin/doc?ormsc/14-06-01 (accessed on 15 February 2021).
- Object Management Group (OMG). Meta Object Facility (MOF) Core Specifiaction, Meta Object Facility 2.5.1; Object Management Group: Needham, MA, USA, 2016; Available online: https://www.omg.org/spec/MOF/2.5.1/PDF (accessed on 8 July 2019).
- Object Management Group (OMG). Unified Modeling Language (UML), version 2.5.1 (formal/2017-12-05); Object Management Group (OMG): Milford, MA, USA, 2017; Available online: https://www.omg.org/spec/UML/ (accessed on 14 April 2021).
- Object Management Group (OMG). Unified Modeling Language (UML), Infrastructure, version 2.4.1 (formal/2011-08-05); Object Management Group (OMG): Milford, MA, USA, 2011; Available online: https://www.omg.org/spec/UML/2.4.1/Infrastructure/PDF (accessed on 14 April 2021).
- Seidewitz, E. What models mean. IEEE Softw. 2003, 20, 26–32. [Google Scholar] [CrossRef]
- Atkinson, C.; Kühne, T. Model-driven development: A metamodeling foundation. IEEE Softw. 2003, 20, 36–41. [Google Scholar] [CrossRef] [Green Version]
- Bagschik, G.; Menzel, T.; Maurer, M. Ontology based scene creation for the development of automated vehicles. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1813–1820. [Google Scholar] [CrossRef] [Green Version]
- Bock, J.; Krajewski, R.; Eckstein, L.; Klimke, J.; Sauerbier, J.; Zlocki, A. Data basis for scenario-based validation of HAD on highways. In Proceedings of the 27th Aachen Colloquium Automobile and Engine Technology, Aachen, Germany, 8–10 October 2018; Eckstein, L., Pischinger, S., Hammermüller, B., Wolsfeld, R., Eds.; Institute for Automotive Engineering, RWTH: Aachen, Germany, 2018; pp. 8–10. [Google Scholar]
- Gasevic, D.; Djuric, D.; Devedzic, V. Model Driven Engineering and Ontology Development, 2nd ed.; Springer: Berlin, Germany, 2009. [Google Scholar]
- Weber, H.; Bock, J.; Klimke, J.; Roesener, C.; Hiller, J.; Krajewski, R.; Zlocki, A.; Eckstein, L. A framework for definition of logical scenarios for safety assurance of automated driving. Traffic Inj. Prev. 2019, 20, S65–S70. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Object Management Group (OMG). Unified Modeling Language (UML), Superstructure; Version 2.2 (formal/2009-02-02); Object Management Group (OMG): Milford, MA, USA, 2009; Available online: https://www.omg.org/spec/UML/2.2/Superstructure/PDF (accessed on 14 April 2021).
- Bruck, J.; Kenn, H. Customizing UML: Which Technique is Right for You? International Business Machines Corp. (IBM): Endicott, NY, USA, 2008; Available online: https://www.eclipse.org/modeling/mdt/uml2/docs/articles/Customizing_UML2_Which_Technique_is_Right_For_You/article.html (accessed on 11 March 2021).
- Institute of Electrical and Electronics Engineers (IEEE). Standard for Modeling and Simulation (M&S) High Level Architecture (HLA): Framework and Rules (1516); Institute of Electrical and Electronics Engineers: New York, NY, USA; Available online: https://standards.ieee.org/standard/1516-2010.html (accessed on 14 January 2021).


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reiher, D.; Hahn, A. Towards a Model-Based Multi-Layered Approach to Describe Traffic Scenarios on a Technical Level. J. Mar. Sci. Eng. 2021, 9, 673. https://doi.org/10.3390/jmse9060673
Reiher D, Hahn A. Towards a Model-Based Multi-Layered Approach to Describe Traffic Scenarios on a Technical Level. Journal of Marine Science and Engineering. 2021; 9(6):673. https://doi.org/10.3390/jmse9060673
Chicago/Turabian StyleReiher, David, and Axel Hahn. 2021. "Towards a Model-Based Multi-Layered Approach to Describe Traffic Scenarios on a Technical Level" Journal of Marine Science and Engineering 9, no. 6: 673. https://doi.org/10.3390/jmse9060673