
A Swarm Intelligence Graph-Based Pathfinding Algorithm Based on Fuzzy Logic (SIGPAF): A Case Study on Unmanned Surface Vehicle Multi-Objective Path Planning


Abstract
:1. Introduction
- Enhance the ability of the SIGPA algorithm to generate an optimal path among multiple objectives by integrating fuzzy logic and fuzzy rules;
- Evaluate the effectiveness of the proposed algorithms to solve multi-objective path planning problems in the case of USVs.
2. Materials and Methods
2.1. Problem Definition and Formulation
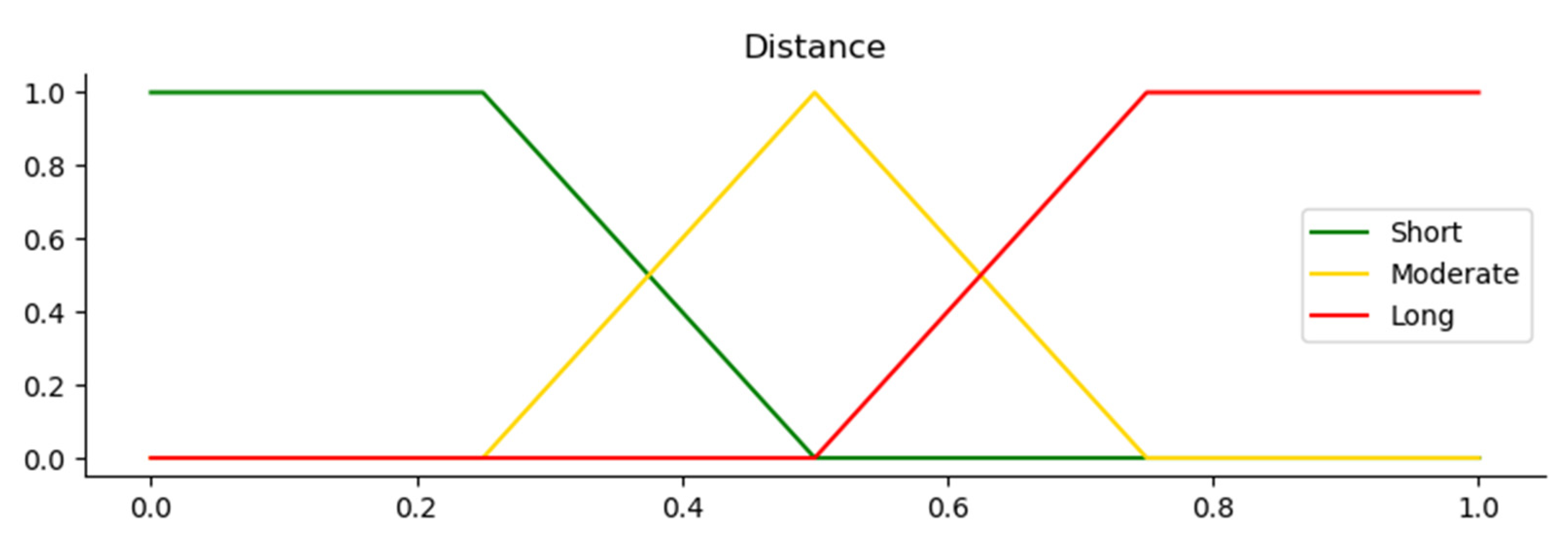
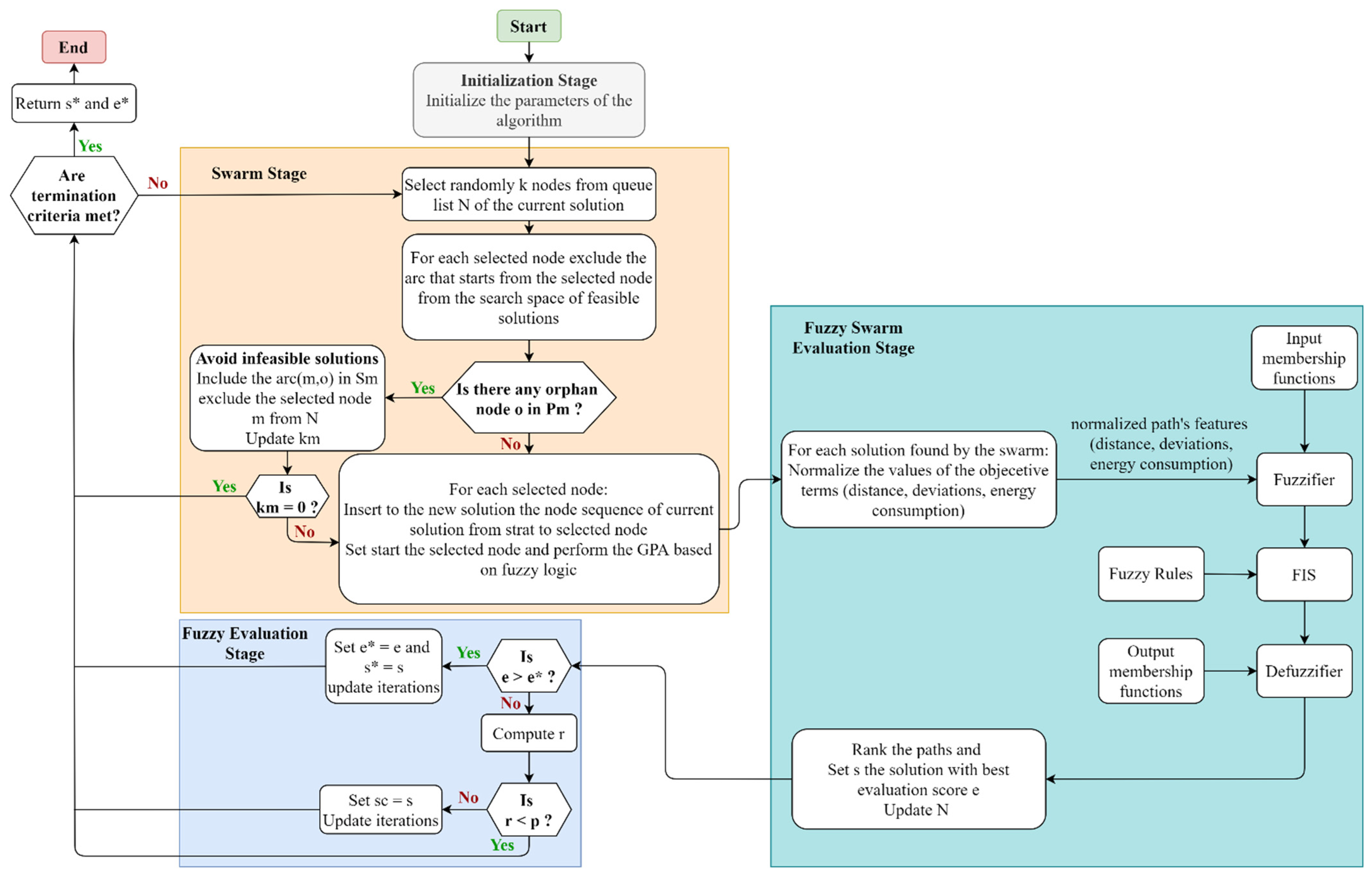
2.2. Fuzzy Swarm Intelligence Graph-Based Pathfinding Algorithm (SIGPAF)
2.2.1. SIGPA Algorithm
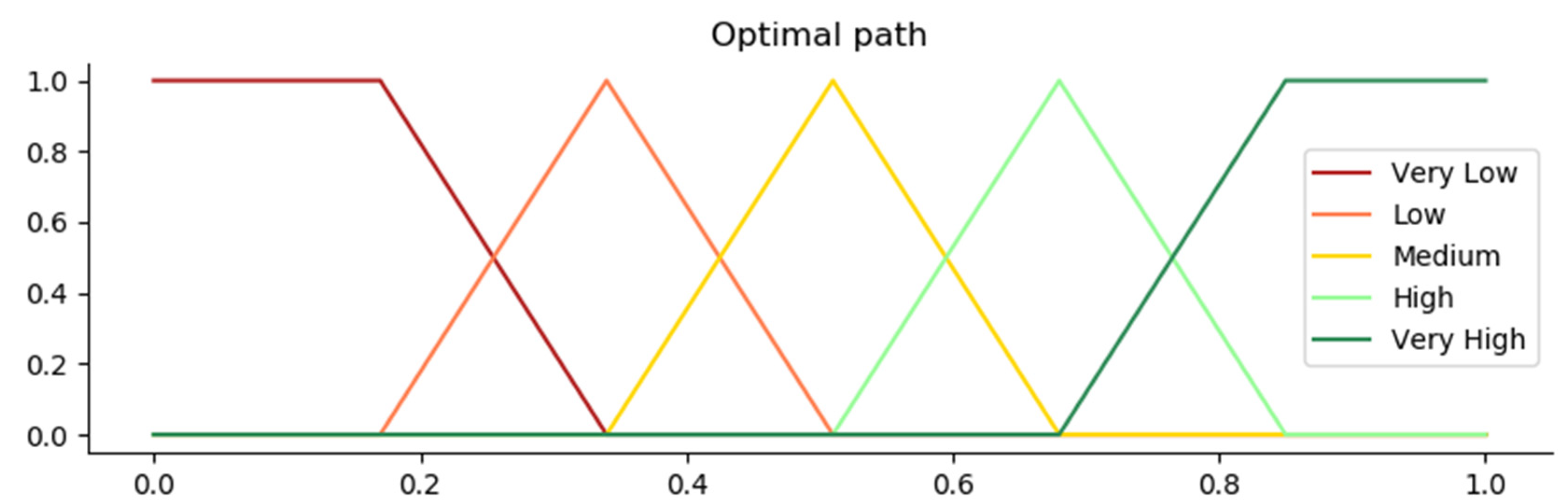
2.2.2. Fuzzy Evaluation
3. Results
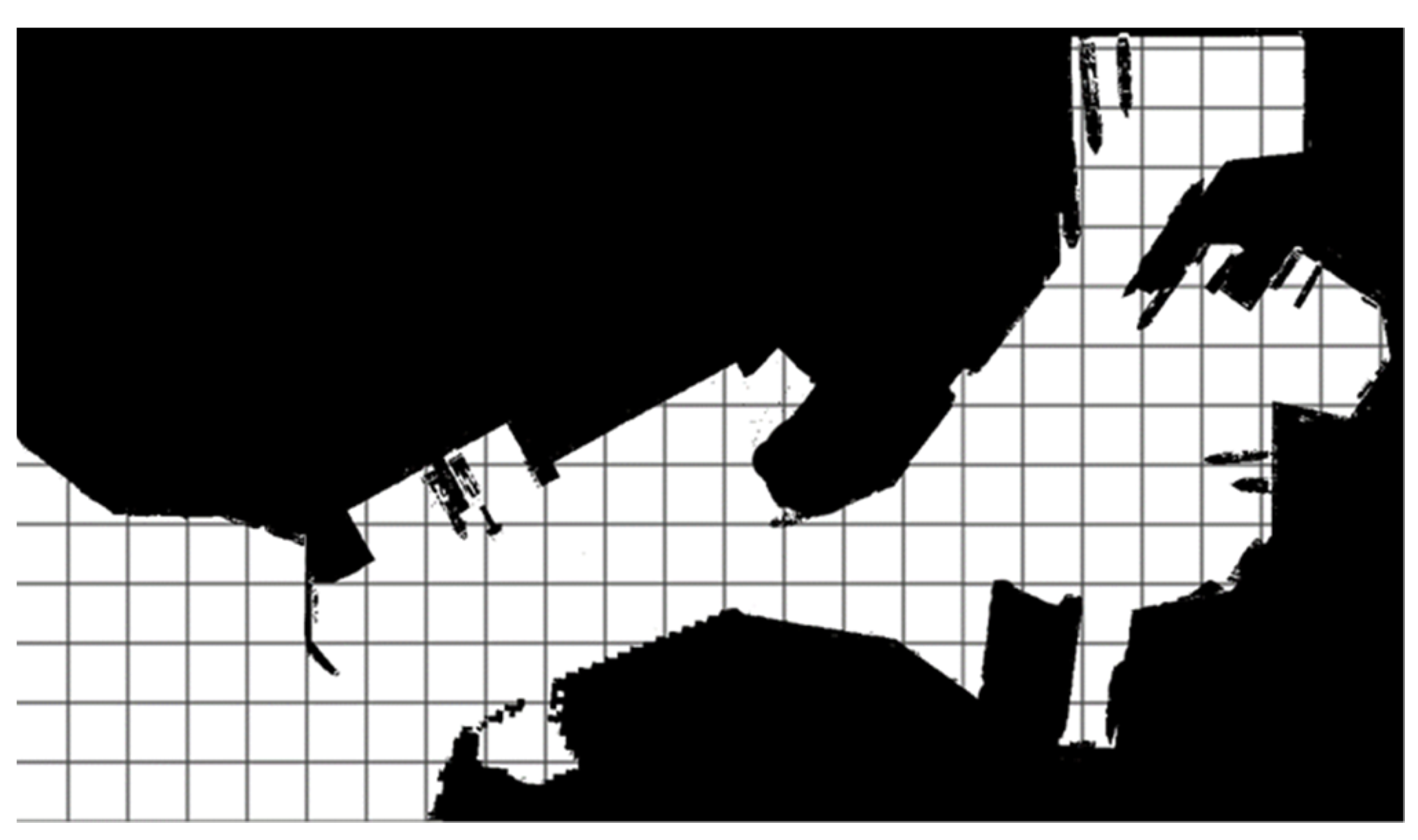
3.1. Evaluation Methodology
3.2. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. Heuristic Approaches in Robot Path Planning: A Survey. Robot. Auton. Syst. 2016, 86, 13–28. [Google Scholar] [CrossRef]
- Iakovidis, D.K.; Diamantis, D.; Dimas, G.; Ntakolia, C.; Spyrou, E. Digital enhancement of cultural experience and accessibility for the visually impaired. In Technological Trends in Improved Mobility of the Visually Impaired; Springer: Berlin/Heidelberg, Germany, 2020; pp. 237–271. [Google Scholar]
- Ntakolia, C.; Dimas, G.; Iakovidis, D.K. User-Centered System Design for Assisted Navigation of Visually Impaired Individuals in Outdoor Cultural Environments. Univ. Access Inform. Soc. 2020. [Google Scholar] [CrossRef]
- Mirjalili, S.; Song Dong, J.; Lewis, A. Ant Colony Optimizer: Theory, Literature Review, and Application in AUV Path Planning. In Nature-Inspired Optimizers: Theories, Literature Reviews and Applications; Mirjalili, S., Song Dong, J., Lewis, A., Eds.; Studies in Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2020; pp. 7–21. ISBN 978-3-030-12127-3. [Google Scholar]
- Wang, H.; Guo, F.; Yao, H.; He, S.; Xu, X. Collision Avoidance Planning Method of USV Based on Improved Ant Colony Optimization Algorithm. IEEE Access 2019, 7, 52964–52975. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D. Optimal Path Planning of an Unmanned Surface Vehicle in a Real- Time Marine Environment using a Dijkstra Algorithm. In Marine Navigation; CRC Press: Boca Raton, FL, USA, 2017; ISBN 978-1-315-09913-2. [Google Scholar]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. A Constrained A* Approach towards Optimal Path Planning for an Unmanned Surface Vehicle in a Maritime Environment Containing Dynamic Obstacles and Ocean Currents. Ocean Eng. 2018, 169, 187–201. [Google Scholar] [CrossRef] [Green Version]
- Song, R.; Liu, Y.; Bucknall, R. Smoothed A* Algorithm for Practical Unmanned Surface Vehicle Path Planning. Appl. Ocean Res. 2019, 83, 9–20. [Google Scholar] [CrossRef]
- Jorge, V.A.M.; Granada, R.; Maidana, R.G.; Jurak, D.A.; Heck, G.; Negreiros, A.P.F.; dos Santos, D.H.; Gonçalves, L.M.G.; Amory, A.M. A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions. Sensors 2019, 19, 702. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ntakolia, C.; Iakovidis, D.K. A Route Planning Framework for Smart Wearable Assistive Navigation Systems. SN Appl. Sci. 2021, 3, 104. [Google Scholar] [CrossRef]
- Ntakolia, C.; Iakovidis, D.K. A Swarm Intelligence Graph-Based Pathfinding Algorithm (SIGPA) for Multi-Objective Route Planning. Comput. Oper. Res. 2021, 133, 105358. [Google Scholar] [CrossRef]
- Deb, K. Multi-objective Optimisation Using Evolutionary Algorithms: An Introduction. In Multi-Objective Evolutionary Optimisation for Product Design and Manufacturing; Wang, L., Ng, A.H.C., Deb, K., Eds.; Springer: London, UK, 2011; pp. 3–34. ISBN 978-0-85729-652-8. [Google Scholar]
- Shen, Y.; Ge, G. Multi-Objective Particle Swarm Optimization Based on Fuzzy Optimality. IEEE Access 2019, 7, 101513–101526. [Google Scholar] [CrossRef]
- Davoodi, M.; Panahi, F.; Mohades, A.; Hashemi, S.N. Multi-Objective Path Planning in Discrete Space. Appl. Soft Comput. 2013, 13, 709–720. [Google Scholar] [CrossRef]
- Xiang, X.; Yu, C.; Lapierre, L.; Zhang, J.; Zhang, Q. Survey on Fuzzy-Logic-Based Guidance and Control of Marine Surface Vehicles and Underwater Vehicles. Int. J. Fuzzy Syst. 2018, 20, 572–586. [Google Scholar] [CrossRef]
- Panda, M.; Das, B.; Subudhi, B.; Pati, B.B. A Comprehensive Review of Path Planning Algorithms for Autonomous Underwater Vehicles. Int. J. Autom. Comput. 2020, 17, 321–352. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on Computational-Intelligence-Based UAV Path Planning. Knowl.-Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Salleh, M.N.M.; Talpur, N.; Hussain, K. Adaptive Neuro-Fuzzy Inference System: Overview, Strengths, Limitations, and Solutions. In Proceedings of the Data Mining and Big Data; Tan, Y., Takagi, H., Shi, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 527–535. [Google Scholar]
- Deng, H.; Zhu, J. Optimal Path Planning for Unmanned Vehicles Using Improved Ant Colony Optimization Algorithm. In Proceedings of the Neural Computing for Advanced Applications; Zhang, H., Yang, Z., Zhang, Z., Wu, Z., Hao, T., Eds.; Springer: Singapore, 2021; pp. 701–714. [Google Scholar]
- Xin, J.; Zhong, J.; Yang, F.; Cui, Y.; Sheng, J. An Improved Genetic Algorithm for Path-Planning of Unmanned Surface Vehicle. Sensors 2019, 19, 2640. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xia, G.; Sun, X.; Xia, X. Multiple Task Assignment and Path Planning of a Multiple Unmanned Surface Vehicles System Based on Improved Self-Organizing Mapping and Improved Genetic Algorithm. J. Mar. Sci. Eng. 2021, 9, 556. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, F.; Liu, Z.; Li, Y. Efficient Path Planning Method of USV for Intelligent Target Search. J. Geovis. Spat. Anal. 2019, 3, 13. [Google Scholar] [CrossRef] [Green Version]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The Hybrid Path Planning Algorithm Based on Improved A* and Artificial Potential Field for Unmanned Surface Vehicle Formations. Ocean Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, D.; Gu, J.; Li, F. A Path-Planning Strategy for Unmanned Surface Vehicles Based on an Adaptive Hybrid Dynamic Stepsize and Target Attractive Force-RRT Algorithm. J. Mar. Sci. Eng. 2019, 7, 132. [Google Scholar] [CrossRef] [Green Version]
- Xin, J.; Zhong, J.; Li, S.; Sheng, J.; Cui, Y. Greedy Mechanism Based Particle Swarm Optimization for Path Planning Problem of an Unmanned Surface Vehicle. Sensors 2019, 19, 4620. [Google Scholar] [CrossRef] [Green Version]
- Zhong, J.; Li, B.; Li, S.; Yang, F.; Li, P.; Cui, Y. Particle Swarm Optimization with Orientation Angle-Based Grouping for Practical Unmanned Surface Vehicle Path Planning. Appl. Ocean Res. 2021, 111, 102658. [Google Scholar] [CrossRef]
- Wang, N.; Jin, X.; Er, M.J. A Multilayer Path Planner for a USV under Complex Marine Environments. Ocean Eng. 2019, 184, 1–10. [Google Scholar] [CrossRef]
- Wang, N.; Xu, H.; Li, C.; Yin, J. Hierarchical Path Planning of Unmanned Surface Vehicles: A Fuzzy Artificial Potential Field Approach. Int. J. Fuzzy Syst. 2020, 23, 1797–1808. [Google Scholar] [CrossRef]
- Yu, K.; Liang, X.; Li, M.; Chen, Z.; Yao, Y.; Li, X.; Zhao, Z.; Teng, Y. USV Path Planning Method with Velocity Variation and Global Optimisation Based on AIS Service Platform. Ocean Eng. 2021, 236, 109560. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, M.; Yan, X. Multi-Objective Path Planning for Unmanned Surface Vehicle with Currents Effects. ISA Trans. 2018, 75, 137–156. [Google Scholar] [CrossRef] [PubMed]
- Xia, G.; Han, Z.; Zhao, B.; Liu, C.; Wang, X. Global Path Planning for Unmanned Surface Vehicle Based on Improved Quantum Ant Colony Algorithm. Math. Probl. Eng. 2019, 2019, 2902170. [Google Scholar] [CrossRef]
- Xia, G.; Han, Z.; Zhao, B.; Wang, X. Local Path Planning for Unmanned Surface Vehicle Collision Avoidance Based on Modified Quantum Particle Swarm Optimization. Complexity 2020, 2020, 3095426. [Google Scholar] [CrossRef]
- Guo, X.; Ji, M.; Zhao, Z.; Wen, D.; Zhang, W. Global Path Planning and Multi-Objective Path Control for Unmanned Surface Vehicle Based on Modified Particle Swarm Optimization (PSO) Algorithm. Ocean Eng. 2020, 216, 107693. [Google Scholar] [CrossRef]
- Li, D.; Wang, P.; Du, L. Path Planning Technologies for Autonomous Underwater Vehicles-A Review. IEEE Access 2019, 7, 9745–9768. [Google Scholar] [CrossRef]
- Zhang, H.; Lin, W.; Chen, A. Path Planning for the Mobile Robot: A Review. Symmetry 2018, 10, 450. [Google Scholar] [CrossRef] [Green Version]
- Mamdani, E.H.; Assilian, S. An Experiment in Linguistic Synthesis with a Fuzzy Logic Controller. Int. J. Man-Mach. Stud. 1975, 7, 1–13. [Google Scholar] [CrossRef]
- Jang, J.S.R.; Sun, C.T.; Mizutani, E. Neuro-Fuzzy and Soft Computing-A Computational Approach to Learning and Machine Intelligence [Book Review]. IEEE Trans. Autom. Control 1997, 42, 1482–1484. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Y.; Zhang, Y.; Nie, Y.; Tang, J.; Zhu, S. A Hybrid Path Planning Algorithm for Unmanned Surface Vehicles in Complex Environment With Dynamic Obstacles. IEEE Access 2019, 7, 126439–126449. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.; Bucknall, R. A Multi-Layered Fast Marching Method for Unmanned Surface Vehicle Path Planning in a Time-Variant Maritime Environment. Ocean Eng. 2017, 129, 301–317. [Google Scholar] [CrossRef]
- Zeng, W.; Church, R.L. Finding Shortest Paths on Real Road Networks: The Case for A*. Int. J. Geogr. Inf. Sci. 2009, 23, 531–543. [Google Scholar] [CrossRef]
- Lerner, J.; Wagner, D.; Zweig, K. (Eds.) Algorithmics of Large and Complex. Networks: Design, Analysis, and Simulation; Theoretical Computer Science and General Issues, Lect. Notes ComputerState-of-the-Art Surveys; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-3-642-02093-3. [Google Scholar]
- Liu, X.; Li, Y.; Zhang, J.; Zheng, J.; Yang, C. Self-Adaptive Dynamic Obstacle Avoidance and Path Planning for USV Under Complex Maritime Environment. IEEE Access 2019, 7, 114945–114954. [Google Scholar] [CrossRef]
- Yan, Z.; Li, J.; Wu, Y.; Zhang, G. A Real-Time Path Planning Algorithm for AUV in Unknown Underwater Environment Based on Combining PSO and Waypoint Guidance. Sensors 2018, 19, 20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hamam, A.; Georganas, N.D. A Comparison of Mamdani and Sugeno Fuzzy Inference Systems for Evaluating the Quality of Experience of Hapto-Audio-Visual Applications. In Proceedings of the 2008 IEEE International Workshop on Haptic Audio Visual Environments and Games, Ottawa, ON, Canada, 18–19 October 2008; pp. 87–92. [Google Scholar]
- Wang, Y.; Chen, Y. A Comparison of Mamdani and Sugeno Fuzzy Inference Systems for Traffic Flow Prediction. J. Comput. 2014, 9, 12–21. [Google Scholar] [CrossRef] [Green Version]
- Davis, D.; Supriya, P. Implementation of Fuzzy-Based Robotic Path Planning. In Proceedings of the Second International Conference on Computer and Communication Technologies; Satapathy, S.C., Raju, K.S., Mandal, J.K., Bhateja, V., Eds.; Springer India: New Delhi, India, 2016; pp. 375–383. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuzzy Rules | Distance | Deviation | Energy Consumption | Path Quality |
|---|---|---|---|---|
| Rule 1 | Short | Smooth | Low | Very High |
| Rule 2 | Short | Smooth | Medium | Very High |
| Rule 3 | Short | Adequate | Low | Very High |
| Rule 4 | Moderate | Smooth | Low | Very High |
| Rule 5 | Short | Smooth | High | High |
| Rule 6 | Short | Adequate | Medium | High |
| Rule 7 | Short | Brut | Low | High |
| Rule 8 | Moderate | Smooth | Medium | High |
| Rule 9 | Moderate | Adequate | Low | High |
| Rule 10 | Long | Smooth | Low | High |
| Rule 11 | Short | Adequate | High | Medium |
| Rule 12 | Short | Brut | Medium | Medium |
| Rule 13 | Short | Brut | High | Medium |
| Rule 14 | Moderate | Smooth | High | Medium |
| Rule 15 | Moderate | Adequate | Medium | Medium |
| Rule 16 | Moderate | Brut | Low | Medium |
| Rule 17 | Long | Smooth | Medium | Medium |
| Rule 18 | Long | Smooth | High | Medium |
| Rule 19 | Long | Adequate | Low | Medium |
| Rule 20 | Long | Brut | Low | Medium |
| Rule 21 | Moderate | Adequate | High | Low |
| Rule 22 | Moderate | Brut | Medium | Low |
| Rule 23 | Moderate | Brut | High | Low |
| Rule 24 | Long | Adequate | Medium | Low |
| Rule 25 | Long | Adequate | High | Low |
| Rule 26 | Long | Brut | Medium | Low |
| Rule 27 | Long | Brut | High | Very Low |
| Algorithm | Mission 1 | Mission 2 | Mission 3 | Average |
|---|---|---|---|---|
| SIGPA | 0.042 | 0.078 | 0.099 | 0.029 |
| SIGPAF-M | 0.044 | 0.082 | 0.105 | 0.031 |
| SIGPAF-TSK | 0.041 | 0.078 | 0.101 | 0.030 |
| Missions | Objectives | SIGPA | SIGPAF-M | SIGPAF-TSK |
|---|---|---|---|---|
| Mission 1 | Traveled distance (km) Path deviations Energy consumption (kg/h) | 2.068 3 0.55 | 2.065 3 0.53 | 2.069 3 0.53 |
| Mission 2 | Traveled distance (km) Path deviations Energy consumption (kg/h) | 3.567 6 0.87 | 3.559 5 0.82 | 3.562 5 0.84 |
| Mission 3 | Traveled distance (km) Path deviations Energy consumption (kg/h) | 4.146 10 1.16 | 4.138 8 1.08 | 4.140 9 1.10 |
| Missions | Evaluation Criteria | SIGPA | SIGPAF-M | SIGPAF-TSK |
|---|---|---|---|---|
| Mission 1 (5 targets, 8 obstacles) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 3.528 7 0.610 0.5195 | 3.454 7 0.607 0.531 | 3.602 5 0.612 0.520 |
| Mission 2 (7 targets, 1 obstacle) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 3.663 11 0.793 0.688 | 3.594 7 0.748 0.698 | 3.594 9 0.752 0.691 |
| Mission 3 (9 targets, 10 obstacles) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 4.308 13 0.982 0.868 | 4.335 12 0.998 0.913 | 4.294 13 0.965 0.885 |
| Mission 4 (12 targets, 4 obstacles) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 4.496 17 1.391 1.146 | 4.428 14 1.243 1.364 | 4.450 14 1.369 1.342 |
| Mission 5 (13 targets, 6 obstacles) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 6.557 23 1.608 1.468 | 6.279 22 1.441 1.519 | 6.356 23 1.507 1.497 |
| Mission 6 (17 targets, 3 obstacles) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 6.706 18 1.786 1.928 | 6.307 20 1.678 2.215 | 6.564 18 1.744 2.052 |
| Mission 7 (19 targets, 4 obstacles) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 9.007 26 2.058 2.494 | 8.698 22 1.859 2.710 | 8.864 23 1.914 2.561 |
| Mission 8 (21 targets, 8 obstacles) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 9.411 29 2.455 2.915 | 8.448 24 2.174 3.360 | 8.332 23 2.134 3.105 |
| Mission 9 (23 targets, 5 obstacles) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 10.730 32 2.889 3.230 | 9.182 26 2.379 3.373 | 9.355 26 2.360 3.543 |
| Mission 10 (25 targets, 2 obstacles) | Traveled distance (km) Path deviations Energy consumption (kg/h) Computing time (ms) | 11.533 36 3.480 3.637 | 10.812 27 2.939 3.968 | 10.964 29 3.009 3.792 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ntakolia, C.; Lyridis, D.V. A Swarm Intelligence Graph-Based Pathfinding Algorithm Based on Fuzzy Logic (SIGPAF): A Case Study on Unmanned Surface Vehicle Multi-Objective Path Planning. J. Mar. Sci. Eng. 2021, 9, 1243. https://doi.org/10.3390/jmse9111243
Ntakolia C, Lyridis DV. A Swarm Intelligence Graph-Based Pathfinding Algorithm Based on Fuzzy Logic (SIGPAF): A Case Study on Unmanned Surface Vehicle Multi-Objective Path Planning. Journal of Marine Science and Engineering. 2021; 9(11):1243. https://doi.org/10.3390/jmse9111243
Chicago/Turabian StyleNtakolia, Charis, and Dimitrios V. Lyridis. 2021. "A Swarm Intelligence Graph-Based Pathfinding Algorithm Based on Fuzzy Logic (SIGPAF): A Case Study on Unmanned Surface Vehicle Multi-Objective Path Planning" Journal of Marine Science and Engineering 9, no. 11: 1243. https://doi.org/10.3390/jmse9111243