
Optimal Energy Control of Battery Hybrid System for Marine Vessels by Applying Neural Network Based on Equivalent Consumption Minimization Strategy


Abstract
:1. Introduction
- ▪
- To implement EMS on electric propulsion system beyond the existing ECMS design limitation,
- ▪
- To contribute to the improvement of the energy efficiency of eco-friendly ships,
- ▪
- To improve the limitations of the existing electric propulsion system,
- ▪
- To expand the application scope of the neural network in industry.
2. Characteristics of Energy Management System Using ECMS-Based Rules Learned by Neural Network
2.1. Rule-Based Control
2.2. Using Neural Network Controller
2.3. Battery-Operating Mode
2.4. Maximum Output Operating Mode
2.5. Setting of Various Operating Ranges by Designer
3. Methodology
3.1. Step 1: Selection of Propulsion System
3.2. Step 2: Design of ECMS with Neural Network
3.2.1. Design of Standards
Initial Startup and Mode 1 (Battery-Only Operation Mode)
Mode 2 (Battery and 1-Generator Operation Mode)
Mode 3 (Battery and 2-Generator Operation Mode)
Mode 4 (Battery–Generator Maximum Output Operation Mode)
Proposed Rule-Based Control Using ECMS
3.2.2. System Operation Flowchart
3.2.3. Rule-Based Control Design
3.2.4. Neural Network Design and Training Results Comparison
3.3. Step 3: Simulation of Generator–Battery Hybrid System Using MATLAB Simulink
3.4. Step 4: Analysis of Neural Network Output
4. Discussion
5. Conclusions
- (1)
- An optimal energy controller could be configured by conducting simulations model of the generator–battery hybrid system employing a neural network using the load of the ship and the battery SOC as the input and the generator output commands as the output.
- (2)
- Based on the results of repeatedly conducted experiments, the optimal neural network structure for optimal energy control comprised a single hidden layer and 20 internal nodes. Moreover, a tangent sigmoid function was selected as the activation function of the hidden layer, whereas linear functions were chosen as those of the output layers.
- (3)
- Simulations were performed under various conditions in which the predicted output of a generator, load variation of the ship, and battery SOC environment conditions were each changed from 0 to 100%. The results were learned by the neural network, and subsequently, Bayesian regularization was used to minimize the errors.
- (4)
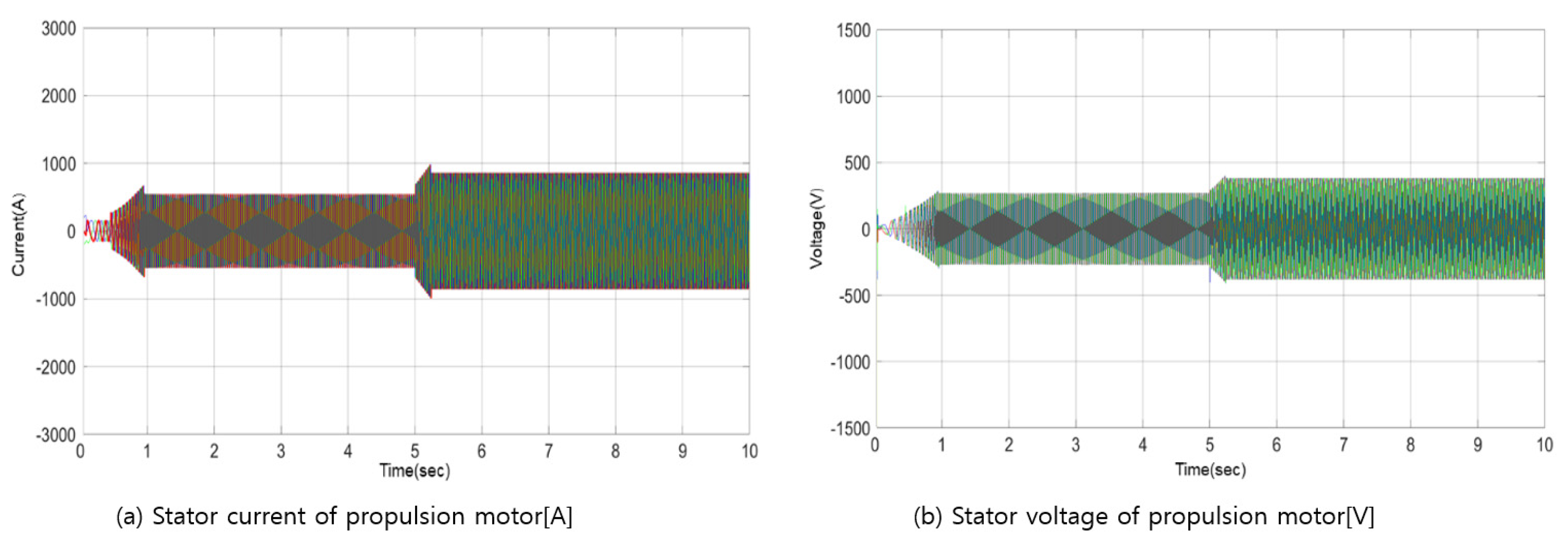
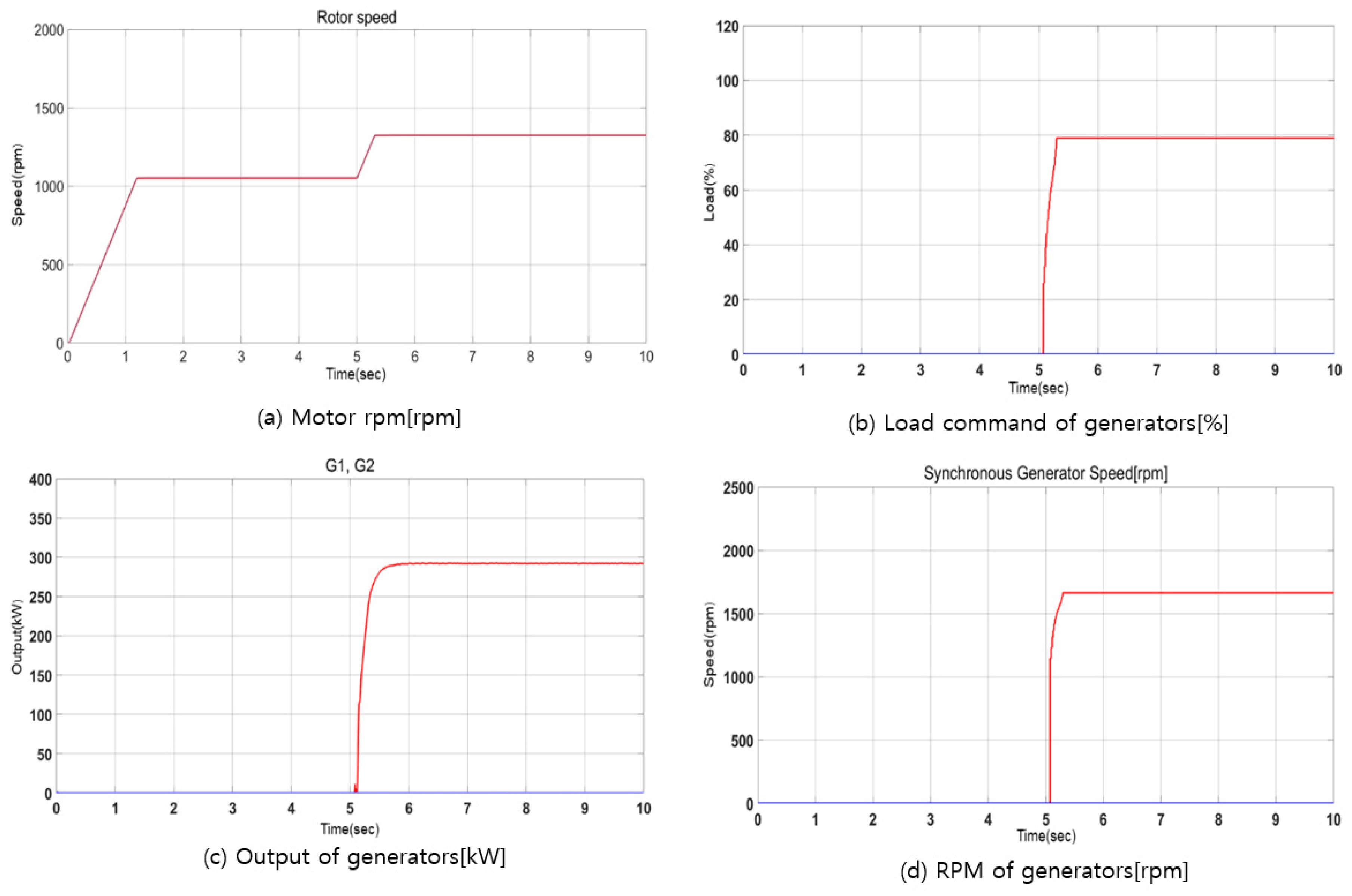
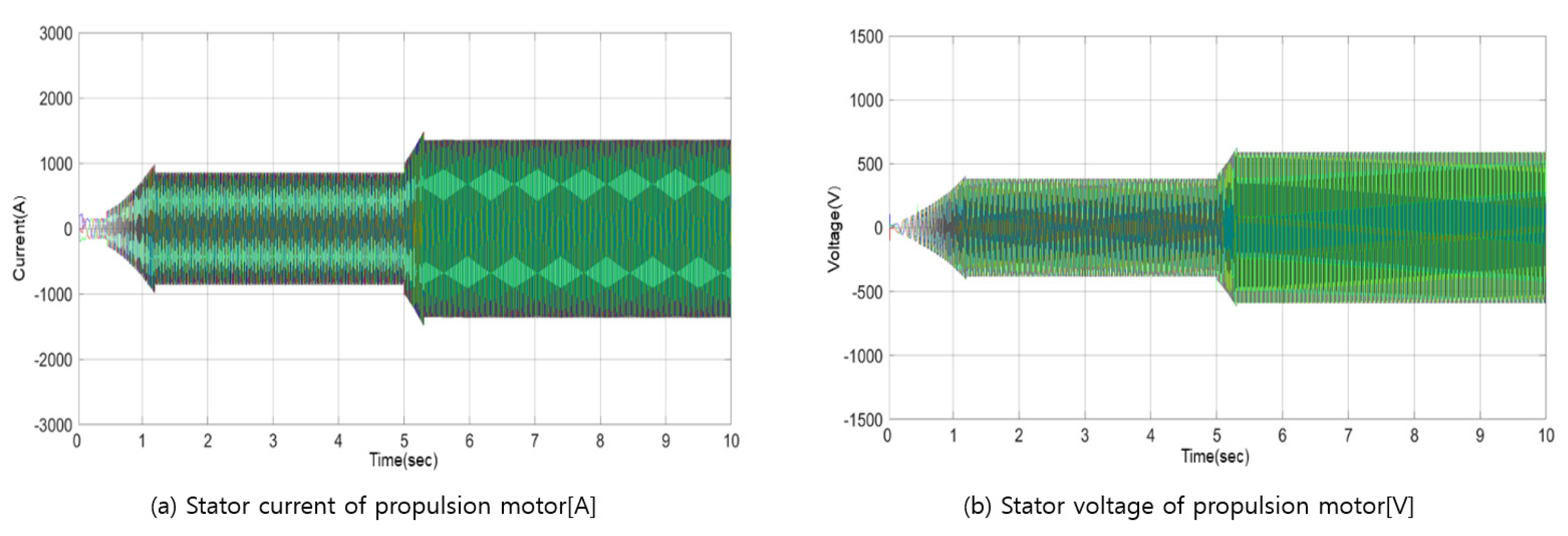
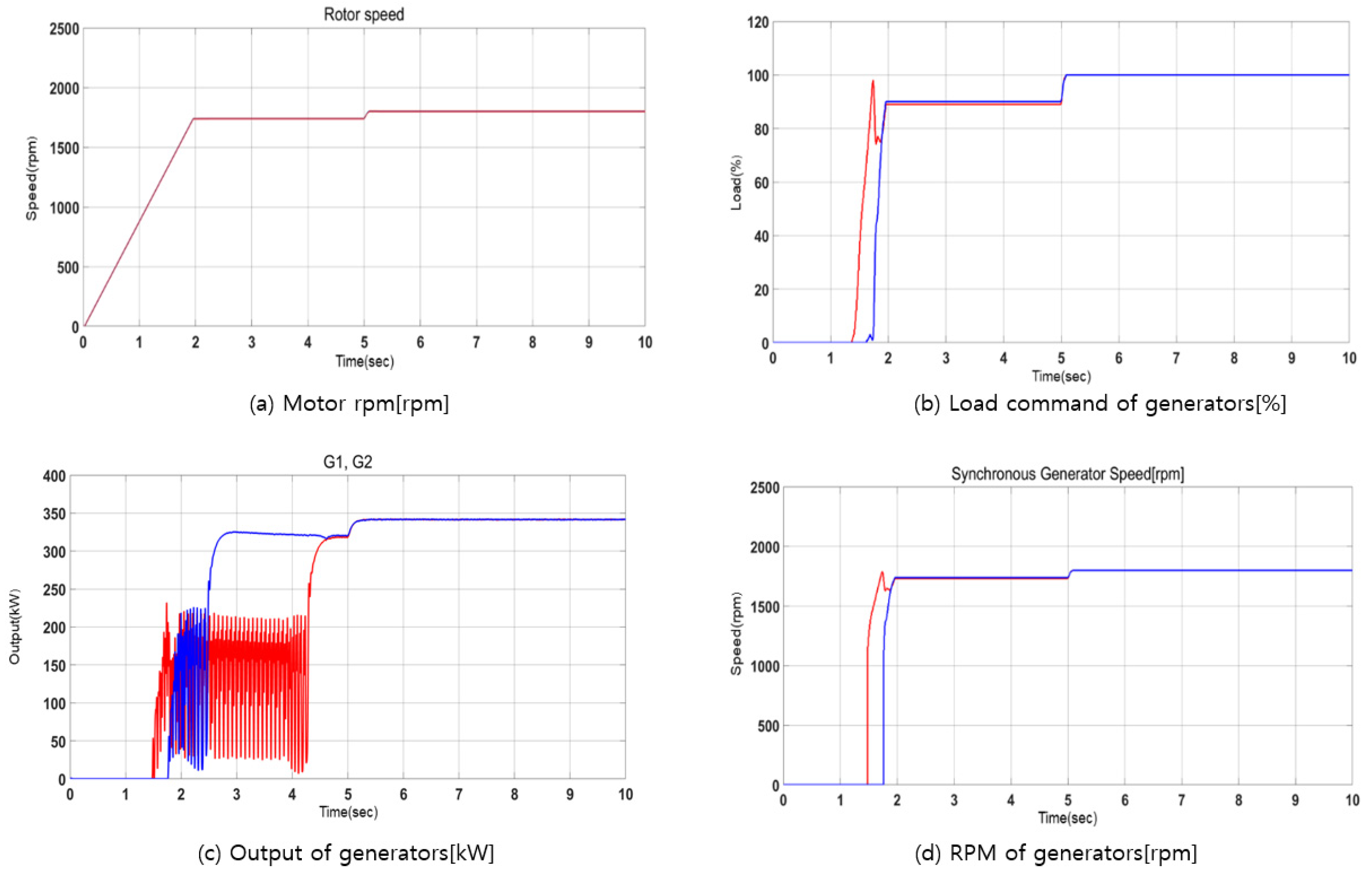
- The stability of the propulsion system was verified in various load environments based on its speed, voltage, and current. Using the output of the neural network controller trained by the optimal energy control rules, simulations confirmed that the control was stably achieved based on the input load of the ship and battery SOC values. Even when these loads and SOCs were not among the input values used for the neural network training, the neural network output controlled the generator output, realizing stable operation of the propulsion motor.
- (5)
- If the control method developed in this study is used for other systems, optimal energy control will be possible. This is because the optimal connection weights could be obtained using the rule-based control logic provided by the designer as the input and output values for training the neural network.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- IMO. Initial IMO GHG Strategy. Available online: https://www.imo.org/en/MediaCentre/HotTopics/Pages/Reducing-greenhouse-gas-emissions-from-ships.aspx (accessed on 23 September 2021).
- European Commission. Reducing Emissions from the Shipping Sector. Available online: https://ec.europa.eu/clima/policies/transport/shipping_en (accessed on 23 September 2021).
- Wan, Z.; el Makhloufi, A.; Chen, Y.; Tang, J. Decarbonizing the international shipping industry: Solutions and policy recommendations. Mar. Pollut. Bull. 2018, 126, 428–435. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al-Falahi, M.D.; Nimma, K.S.; Jayasinghe, S.D.; Enshaei, H.; Guerrero, J.M. Power management optimization of hybrid power systems in electric ferries. Energy Convers. Manag. 2018, 172, 50–66. [Google Scholar] [CrossRef] [Green Version]
- Stoumpos, S.; Theotokatos, G.; Boulougouris, E.; Vassalos, D.; Lazakis, I.; Livanos, G. Marine dual fuel engine modelling and parametric investigation of engine settings effect on performance-emissions trade-offs. Ocean Eng. 2018, 157, 376–386. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.-H.; Lee, S.-H.; Sul, S.-K. Variable-Speed Engine Generator With Supercapacitor: Isolated Power Generation System and Fuel Efficiency. IEEE Trans. Ind. Appl. 2009, 45, 2130–2135. [Google Scholar] [CrossRef]
- Jeon, H.M.; Kim, S.; Kim, J. A Study on Application of Electric Propulsion System using AFE Rectifier for Small Coastal Vessels. J. Korean Soc. Mar. Environ. Saf. 2018, 24, 373–380. [Google Scholar] [CrossRef]
- Ghenai, C.; Al-Ani, I.; Khalifeh, F.; Alamaari, T.; Hamid, A.K. Design of Solar PV/Fuel Cell/Diesel Generator Energy System for Dubai Ferry. In Proceedings of the 2019 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 26 March–10 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Son, Y.K. High-Efficiency Operation of Maritime DC Power System Consisting of Permanent Magnet Generator and Diode Rectifier; Seoul National University: Seoul, Korea, 2020. [Google Scholar]
- Yuan, L.C.; Tjahjowidodo, T.; Lee, G.S.; Chan, R.; Ådnanes, A.K. Equivalent consumption minimization strategy for hybrid all-electric tugboats to optimize fuel savings. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 6803–6808. [Google Scholar]
- Chua, L.W.; Tjahjowidodo, T.; Seet, G.G.; Chan, R. Implementation of optimiza-tion-based power management for all-electric hybrid vessels. IEEE Access 2018, 6, 74339–74354. [Google Scholar] [CrossRef]
- Kanellos, F.D.; Anvari-Moghaddan, A.; Guerrero, J. A cost-effective and emission-aware power management system for ships with integrated full electric propulsion. Electr. Power Syst. Res. 2017, 150, 63–75. [Google Scholar] [CrossRef] [Green Version]
- Jaurola, M.; Hedin, A.; Tikkanen, S.; Huhtala, K. Optimising design and power management in energy-efficient marine vessel power systems: A literature review. J. Mar. Eng. Technol. 2019, 18, 92–101. [Google Scholar] [CrossRef] [Green Version]
- Kalikatzarakis, M.; Geertsma, R.; Boonen, E.; Visser, K.; Negenborn, R. Ship energy management for hybrid propulsion and power supply with shore charging. Control. Eng. Pract. 2018, 76, 133–154. [Google Scholar] [CrossRef]
- Syverud, T.H. Modeling and Control of a DC-Grid Hybrid Power System with Battery and Variable Speed Diesel Generators. Master’s Thesis, NTNU, Taipei, Taiwan, 2016. [Google Scholar]
- Motapon, S.N.; Dessaint, L.-A.; Al-Haddad, K. A Comparative Study of Energy Management Schemes for a Fuel-Cell Hybrid Emergency Power System of More-Electric Aircraft. IEEE Trans. Ind. Electron. 2014, 61, 1320–1334. [Google Scholar] [CrossRef]
- Dedes, E.K. Investigation of Hybrid Systems for Diesel Powered Ships; University of Southampton: Southampton, UK, 2013. [Google Scholar]
- Geertsma, R.; Negenborn, R.; Visser, K.; Hopman, J. Design and control of hybrid power and propulsion systems for smart ships: A review of developments. Appl. Energy 2017, 194, 30–54. [Google Scholar] [CrossRef]
- Lan, H.; Wen, S.; Hong, Y.-Y.; Yu, D.C.; Zhang, L. Optimal sizing of hybrid PV/diesel/battery in ship power system. Appl. Energy 2015, 158, 26–34. [Google Scholar] [CrossRef] [Green Version]
- Ghenai, C.; Bettayeb, M.; Brdjanin, B.; Hamid, A.K. Hybrid solar PV/PEM fuel Cell/Diesel Generator power system for cruise ship: A case study in Stockholm, Sweden. Case Stud. Therm. Eng. 2019, 14, 100497. [Google Scholar] [CrossRef]
- Yu, W.; Zhou, P.; Wang, H. Evaluation on the energy efficiency and emissions reduction of a short-route hybrid sightseeing ship. Ocean Eng. 2018, 162, 34–42. [Google Scholar] [CrossRef] [Green Version]
- Skjong, E.; Johansen, T.A.; Molinas, M.; Sorensen, A.J. Approaches to Economic Energy Management in Diesel–Electric Marine Vessels. IEEE Trans. Transp. Electrif. 2017, 3, 22–35. [Google Scholar] [CrossRef] [Green Version]
- La Tona, G.; Luna, M.; Di Piazza, M.C.; Pietra, A. Energy Management System for Efficiency Increase in Cruise Ship Microgrids. In Proceedings of the IECON 45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 1, pp. 4056–4062. [Google Scholar]
- Rezk, H.; Nassef, A.M.; Abdelkareem, M.A.; Alami, A.H.; Fathy, A. Comparison among various energy management strategies for reducing hydrogen consumption in a hybrid fuel cell/supercapacitor/battery system. Int. J. Hydrogen Energy 2021, 46, 6110–6126. [Google Scholar] [CrossRef]
- Bassam, A.M.; Phillips, A.; Turnock, S.R.; Wilson, P. An improved energy management strategy for a hybrid fuel cell/battery passenger vessel. Int. J. Hydrogen Energy 2016, 41, 22453–22464. [Google Scholar] [CrossRef] [Green Version]
- Fallah, S.N.; Deo, R.C.; Shojafar, M.; Conti, M.; Shamshirband, S. Computational Intelligence Approaches for Energy Load Forecasting in Smart Energy Management Grids: State of the Art, Future Challenges, and Research Directions. Energies 2018, 11, 596. [Google Scholar] [CrossRef] [Green Version]
- Fitch, F.B.; McCulloch Warren, S.; Pitts, W. A logical calculus of the ideas immanent in nervous activity. J. Symb. Log. 1944, 9, 115–133. [Google Scholar]
- Hagan, M.T. Neural Network Design, 2nd ed.; PWS: Boston, MA, USA, 2014; p. 800. [Google Scholar]
- Hinton, G.E.; van Camp, D. Keeping the neural networks simple by minimizing the description length of the weights. In Proceedings of the Sixth Annual Conference on Computational Learning Theory-COLT ’93, Toronto, ON, Canada, 1 August 1993; ACM Press: New York, NY, USA, 1993; pp. 5–13. [Google Scholar]
- Barber, D.; Bishop, C.M. Ensemble learning in Bayesian neural networks. NATO ASI Ser. F Comput. Syst. Sci. 1998, 168, 215–238. [Google Scholar]
- Beşikçi, E.B.; Arslan, O.; Turan, O.; Ölçer, A. An artificial neural network based decision support system for energy efficient ship operations. Comput. Oper. Res. 2016, 66, 393–401. [Google Scholar] [CrossRef] [Green Version]
- Wen, S.; Zhao, T.; Tang, Y.; Xu, Y.; Zhu, M.; Fang, S.; Ding, Z. Coordinated Optimal Energy Management and Voyage Scheduling for All-Electric Ships Based on Predicted Shore-Side Electricity Price. IEEE Trans. Ind. Appl. 2021, 57, 139–148. [Google Scholar] [CrossRef]
- Yavasoglu, H.A.; Tetik, Y.E.; Ozcan, H.G. Neural network-based energy management of multi-source (battery/UC/FC) powered electric vehicle. Int. J. Energy Res. 2020, 44, 12416–12429. [Google Scholar] [CrossRef]
- Dinh, T.Q.; Bui, T.M.; Marco, J.; Watts, C.; Yoon, J.I. Optimal Energy Management for Hybrid Electric Dynamic Positioning Vessels. IFAC-PapersOnLine 2018, 51, 98–103. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power | Mode | ||||
|---|---|---|---|---|---|
| Load Condition | |||||
| M1 | |||||
| M2 | |||||
| M3-1 | Gopt | ||||
| M3-2 | |||||
| Load [kW] | 1000 | 900 | 800 | 700 | 600 | 500 | 400 | 300 | 200 | 100 | 50 | 0 | ||
| Load [%] | 100 | 90 | 80 | 70 | 60 | 50 | 40 | 30 | 20 | 10 | 5 | 0 | ||
| SOC [kW] | 310 | 100[%] | 100, 100 | 90, 90 | 76, 76 | 75, 47 | 93, 0 | 64, 0 | 35, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 |
| 279 | 90[%] | 100, 100 | 90, 90 | 76, 76 | 75, 47 | 93, 0 | 64, 0 | 35, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | |
| 248 | 80[%] | 100, 100 | 95, 95 | 80, 80 | 75, 56 | 75, 27 | 73, 0 | 44, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | |
| 217 | 70[%] | 100, 100 | 99, 99 | 85, 85 | 75, 65 | 75, 36 | 82, 0 | 53, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | |
| 186 | 60[%] | 100, 100 | 100, 100 | 89, 89 | 75, 75 | 75, 45 | 91, 0 | 62, 0 | 33, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | |
| 155 | 50[%] | 100, 100 | 100, 100 | 94, 94 | 79, 79 | 75, 54 | 100, 0 | 71, 0 | 42, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | |
| 124 | 40[%] | 100, 100 | 100, 100 | 98, 98 | 84, 84 | 75, 63 | 75, 34 | 80, 0 | 51, 0 | 0, 0 | 0, 0 | 0, 0 | 0, 0 | |
| 93 | 30[%] | 100, 100 | 100, 100 | 100, 100 | 88, 88 | 75, 72 | 75, 43 | 89, 0 | 60, 0 | 31, 0 | 0, 0 | 0, 0 | 0, 0 | |
| 62 | 20[%] | 100, 100 | 100, 100 | 100, 100 | 100, 100 | 87, 87 | 75, 70 | 75, 41 | 87, 0 | 58, 0 | 29, 0 | 29, 0 | 29, 0 | |
| 31 | 10[%] | 100, 100 | 100, 100 | 100, 100 | 100, 100 | 87, 87 | 75, 70 | 75, 41 | 87, 0 | 58, 0 | 29, 0 | 29, 0 | 29, 0 | |
| 0 | 0[%] | 100, 100 | 100, 100 | 100, 100 | 100, 100 | 87, 87 | 75, 70 | 75, 41 | 87, 0 | 58, 0 | 29, 0 | 29, 0 | 29, 0 | |
| Neural Network Input | Rule-Based Strategy | Neural Network Output | ||||
|---|---|---|---|---|---|---|
| Item | Load | SOC | G1 | G2 | G1 | G2 |
| Unit | [%] | [%] | [%] | [%] | [%] | [%] |
| 1 | 0 | 0 | 29 | 0 | 30 | 1 |
| 2 | 0 | 30 | 0 | 0 | 1 | 0 |
| 3 | 10 | 90 | 0 | 0 | 0 | 0 |
| 4 | 20 | 50 | 0 | 0 | 0 | 1 |
| 5 | 40 | 40 | 80 | 0 | 79 | 0 |
| 6 | 40 | 0 | 75 | 41 | 75 | 41 |
| 7 | 90 | 100 | 90 | 90 | 89 | 90 |
| 8 | 100 | 100 | 100 | 100 | 100 | 100 |
| 9 | 25 | 25 | N/A | N/A | 73 | 0 |
| 10 | 75 | 35 | N/A | N/A | 93 | 92 |
| Start | After | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Mode | Load | SOC | G1 | G2 | Mode | Load | SOC | G1 | G2 | |
| Initial start | 2 | 0 | 0 | 29 | 0 | 1 | 0 | 30 | 0 | 0 |
| Battery only | 1 | 10 | 90 | 0 | 0 | 1 | 20 | 50 | 0 | 0 |
| Sole running | 1 | 20 | 50 | 0 | 0 | 2 | 40 | 40 | 80 | 0 |
| Parallel running | 2 | 40 | 40 | 80 | 0 | 3 | 40 | 0 | 75 | 41 |
| Max. load | 3 | 90 | 100 | 90 | 90 | 4 | 100 | 100 | 100 | 100 |
| Random load | 2 | 25 | 25 | 73 | 0 | 3 | 75 | 35 | 93 | 93 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Kim, J. Optimal Energy Control of Battery Hybrid System for Marine Vessels by Applying Neural Network Based on Equivalent Consumption Minimization Strategy. J. Mar. Sci. Eng. 2021, 9, 1228. https://doi.org/10.3390/jmse9111228
Kim S, Kim J. Optimal Energy Control of Battery Hybrid System for Marine Vessels by Applying Neural Network Based on Equivalent Consumption Minimization Strategy. Journal of Marine Science and Engineering. 2021; 9(11):1228. https://doi.org/10.3390/jmse9111228
Chicago/Turabian StyleKim, Seongwan, and Jongsu Kim. 2021. "Optimal Energy Control of Battery Hybrid System for Marine Vessels by Applying Neural Network Based on Equivalent Consumption Minimization Strategy" Journal of Marine Science and Engineering 9, no. 11: 1228. https://doi.org/10.3390/jmse9111228