Generation and Absorption of Periodic Waves Traveling on a Uniform Current in a Fully Nonlinear BEM-based Numerical Wave Tank


Abstract
:1. Introduction
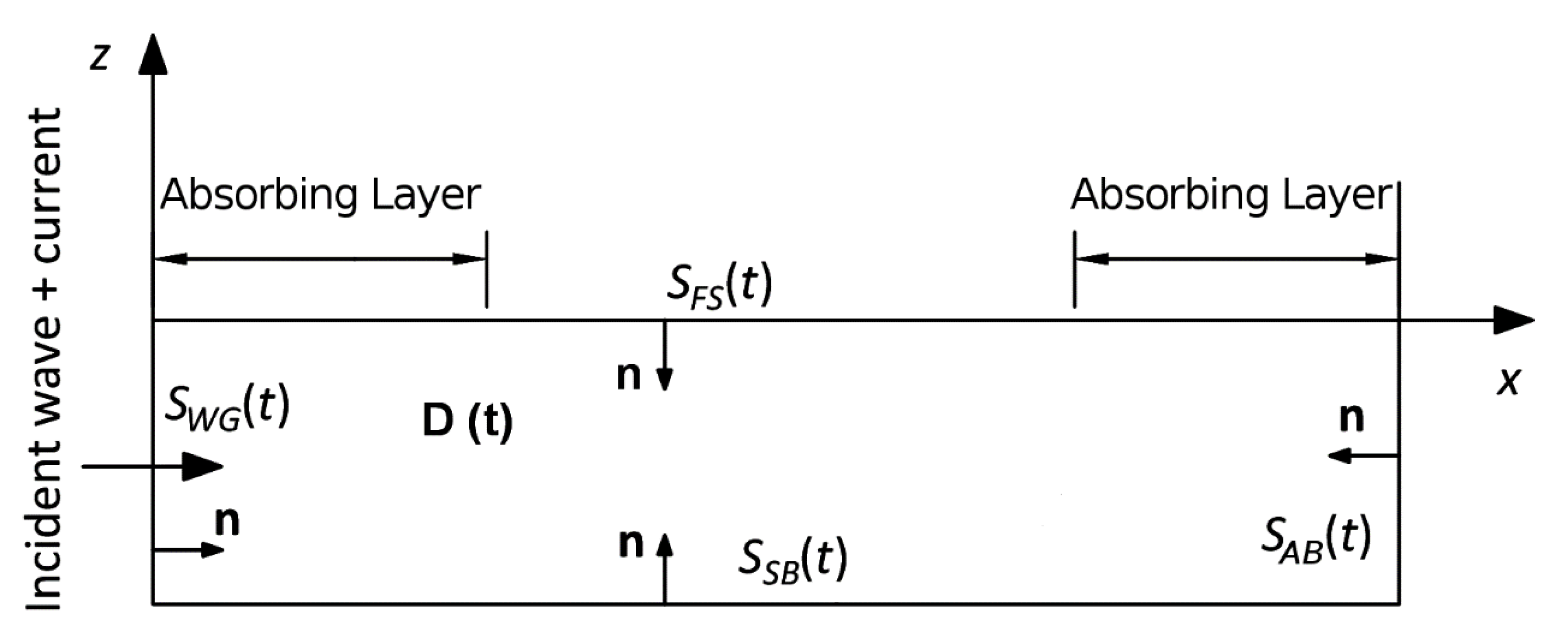
2. Mathematical Formulation
3. Numerical Implementation
3.1. Mixed Eulerian Lagrangian Method
3.2. Initial Conditions and Ramp Function
3.3. Integral form of the Laplace Equation and Its Numerical Solution
3.4. Spatial Derivatives, Double Nodes Representation, and Regridding of Boundaries
3.5. Absorbing Layers
3.6. Modification of the Outflow Condition on the Absorbing Beach Boundary
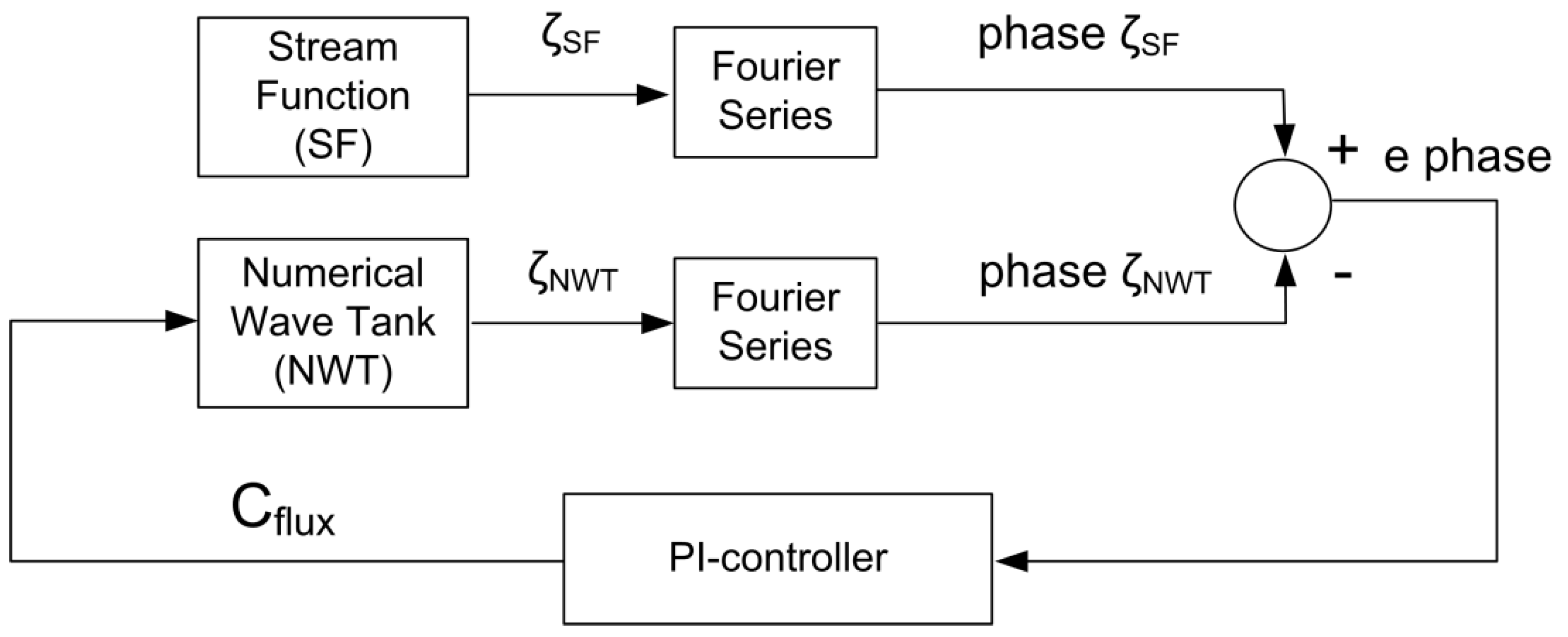
3.7. Wave Kinematics According to Stream Function Theory
3.8. Description of the Solver
- Definition/Generation of Boundary Surface S(t)
- Regridding of the nodes on SFS(t) (if needed) and of the vertical boundaries SWG(t), SAB(t) (every time step) based on the instantaneous surface elevation at the end-nodes;
- Generation of S(t) to be used in BEM.
- Solution of BIEs Using BEM (Eulerian Part)
- Calculation of the convolution integrals in BIE (13) and of the solid angle, ;
- Assignment of the known (Dirichlet or Neumann) data on S(t), i.e., on SWG(t) from the stream function theory and on SFS(t) from the previous time step solution;
- Formulation and solution of the linear system of equations to estimate on SFS(t);
- Calculation (numerically) of and () on SFS(t);
- Calculation of on SFS(t) (transformation from the local coordinate system (s,t) to the global one (x,z) and application of the double-node technique at the end-nodes).
- Integration in Time (Lagrangian Part)
- Calculation of the total derivatives of u(t), based on the estimated and on SFS(t), considering the damping terms that appear within the absorbing layers;
- Estimation of the potential and position vector of the markers on SFS(t) at t + dt.
4. Numerical Results and Discussion
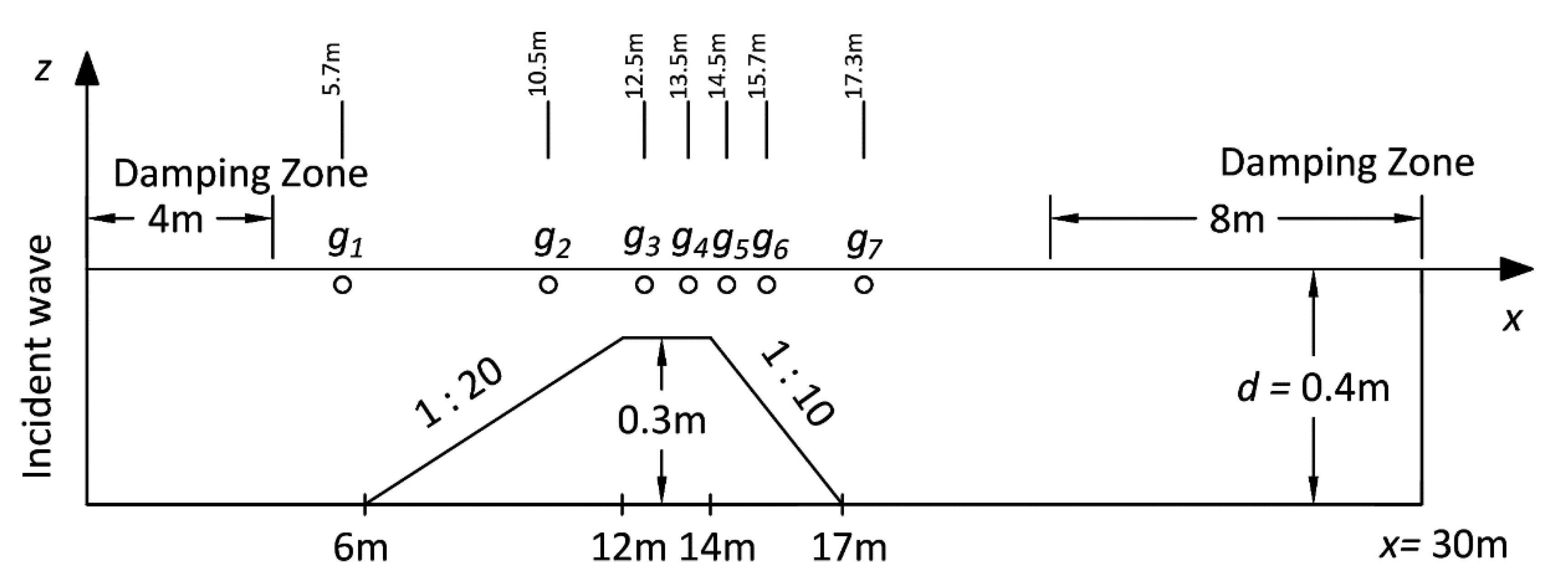
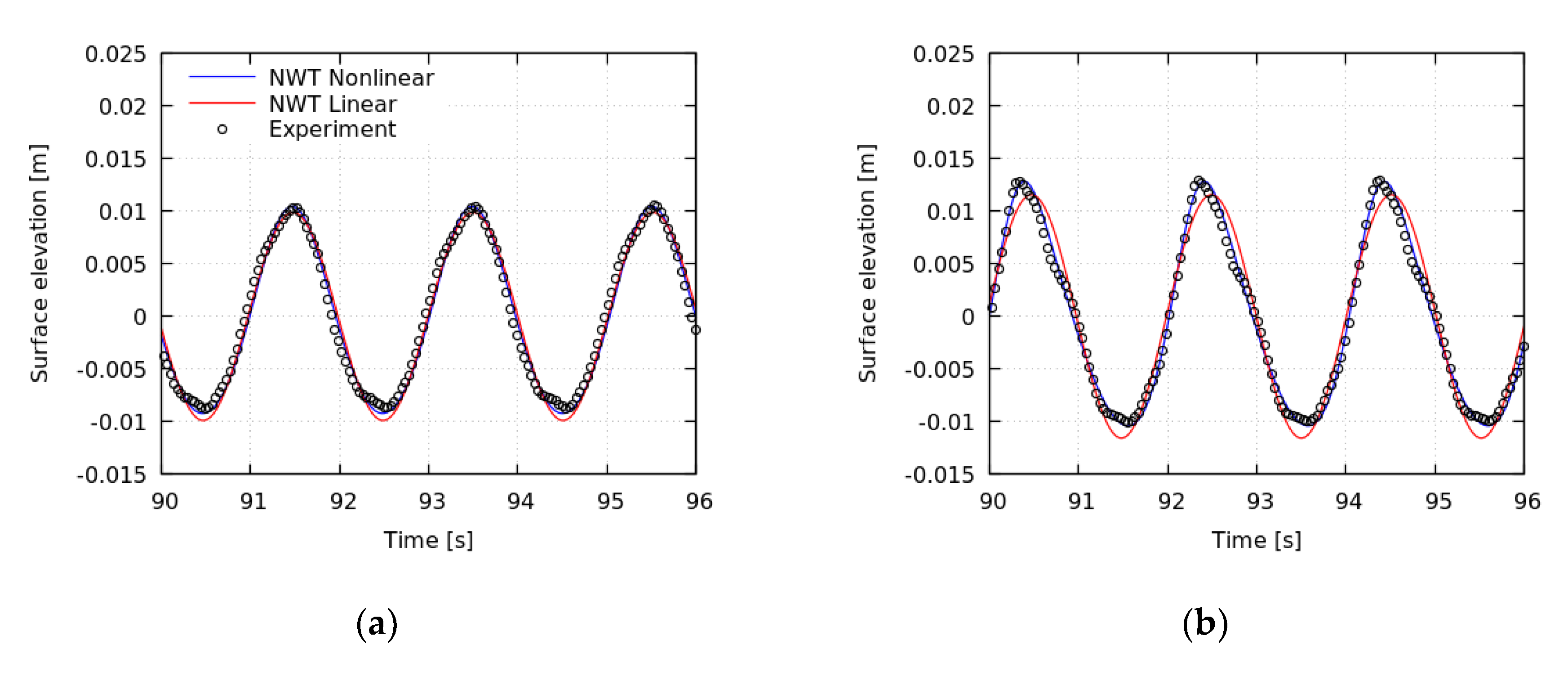
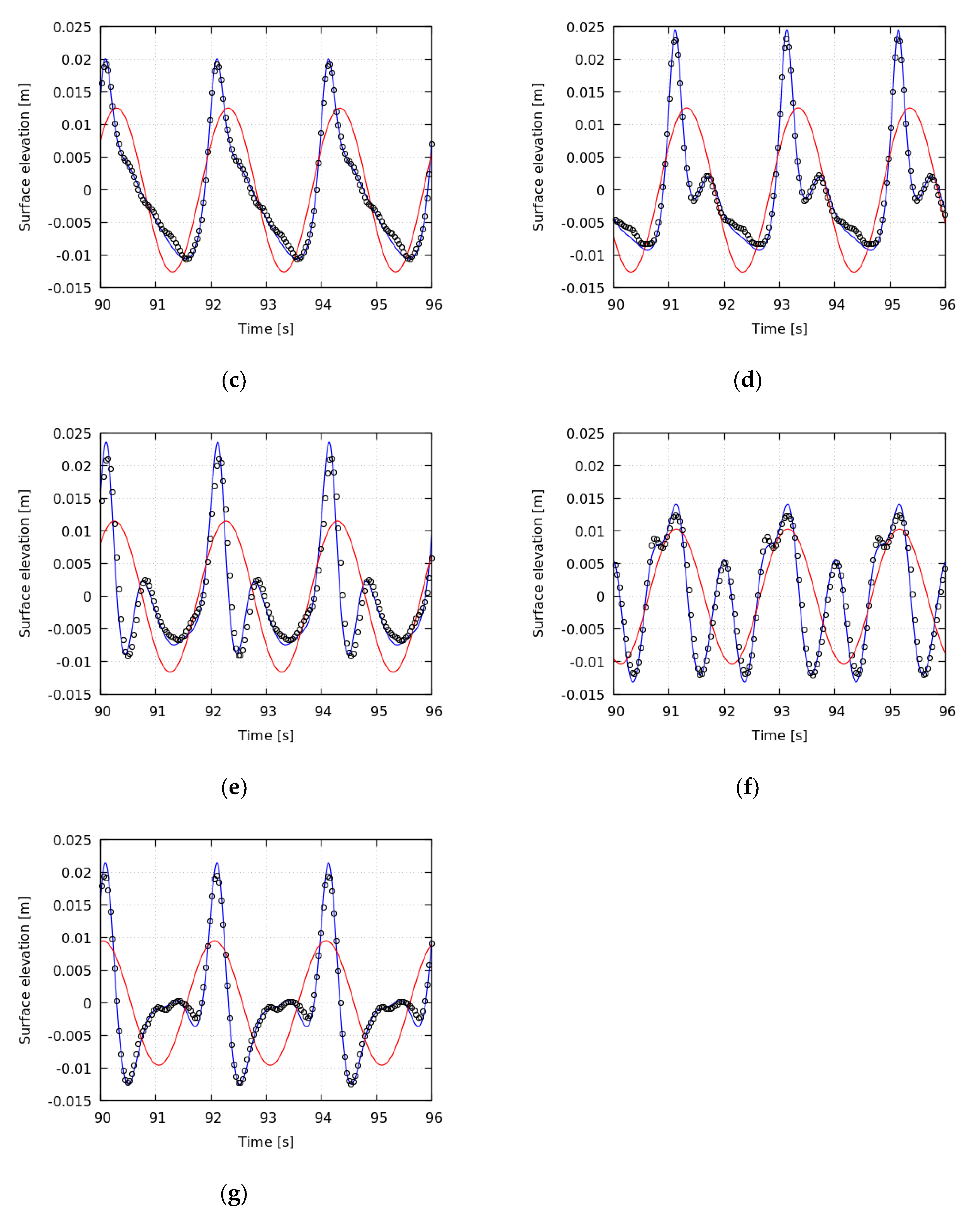
4.1. Validation of the Method Against Measurements
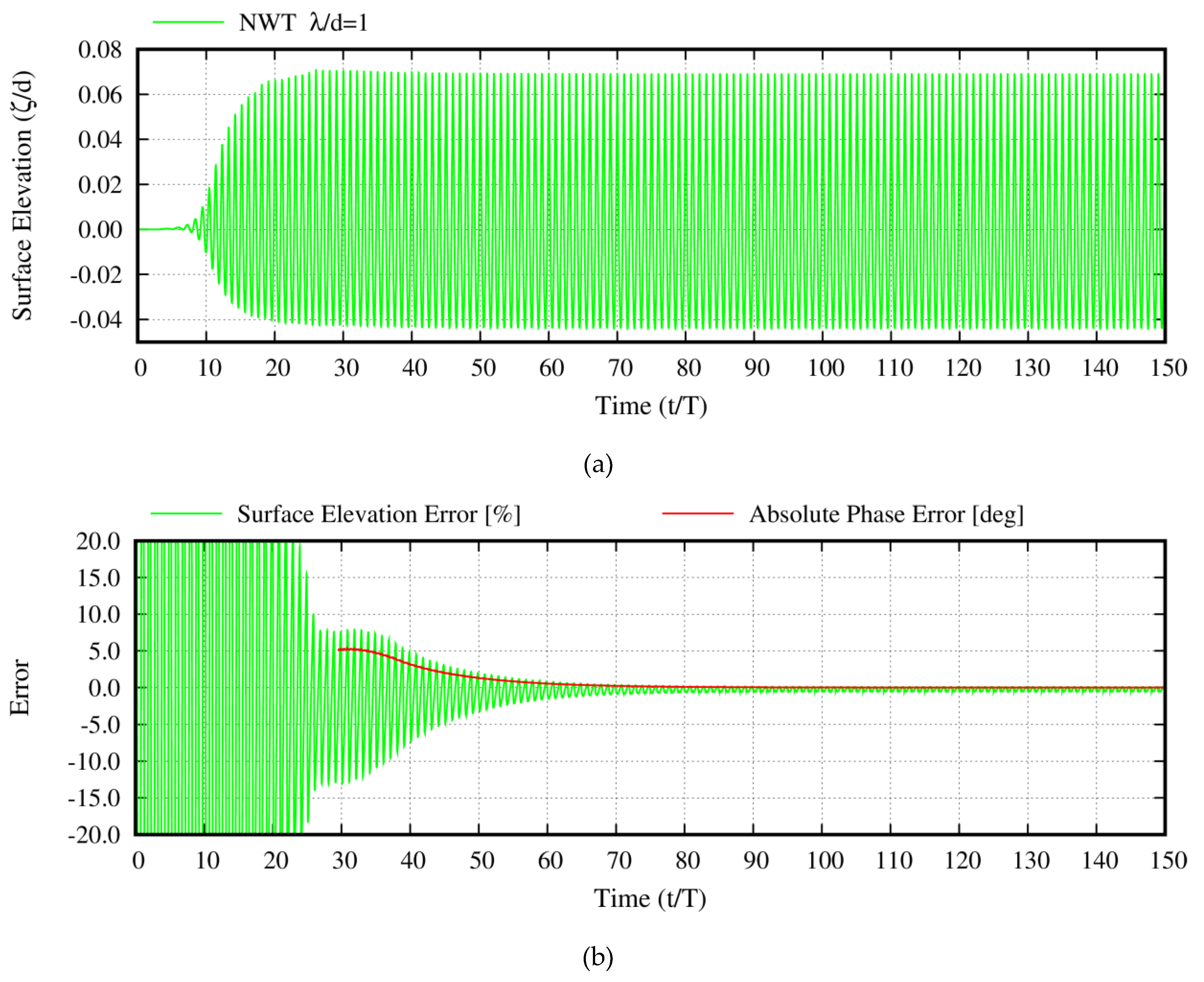
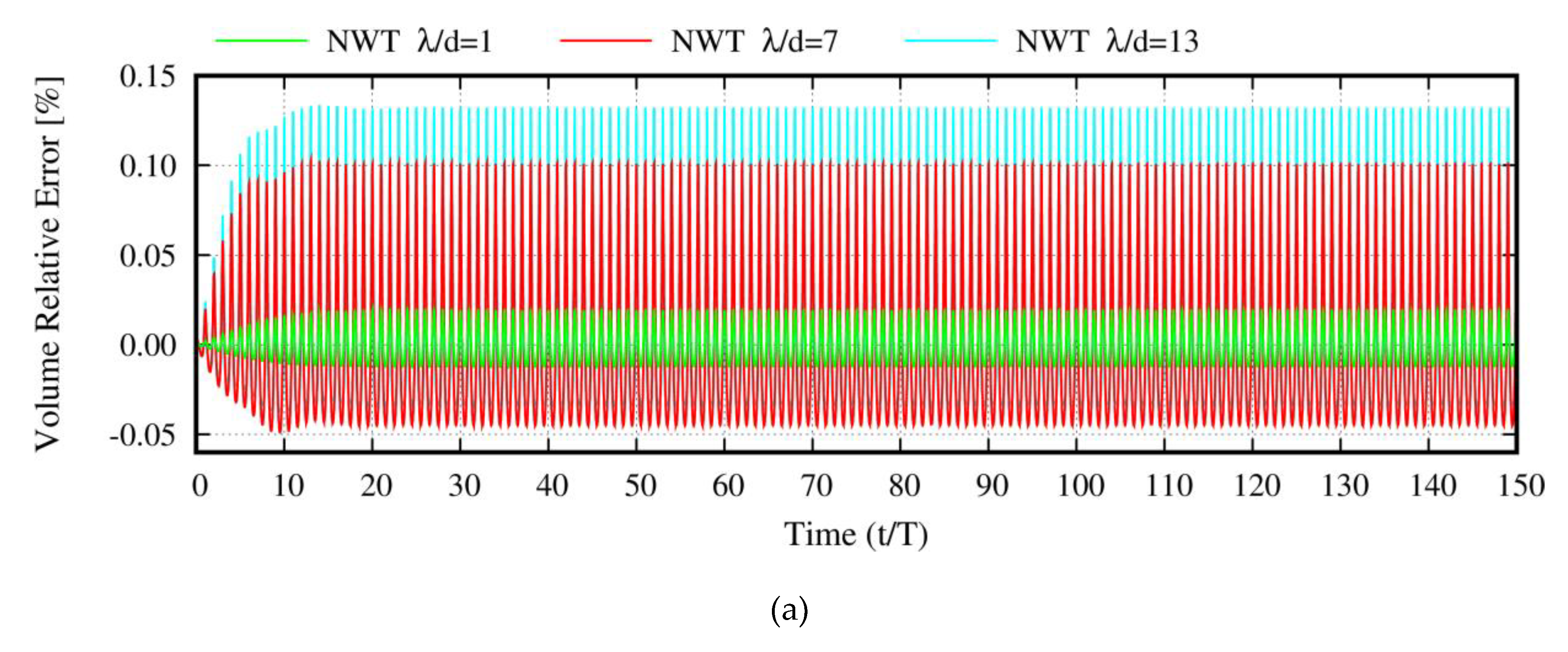
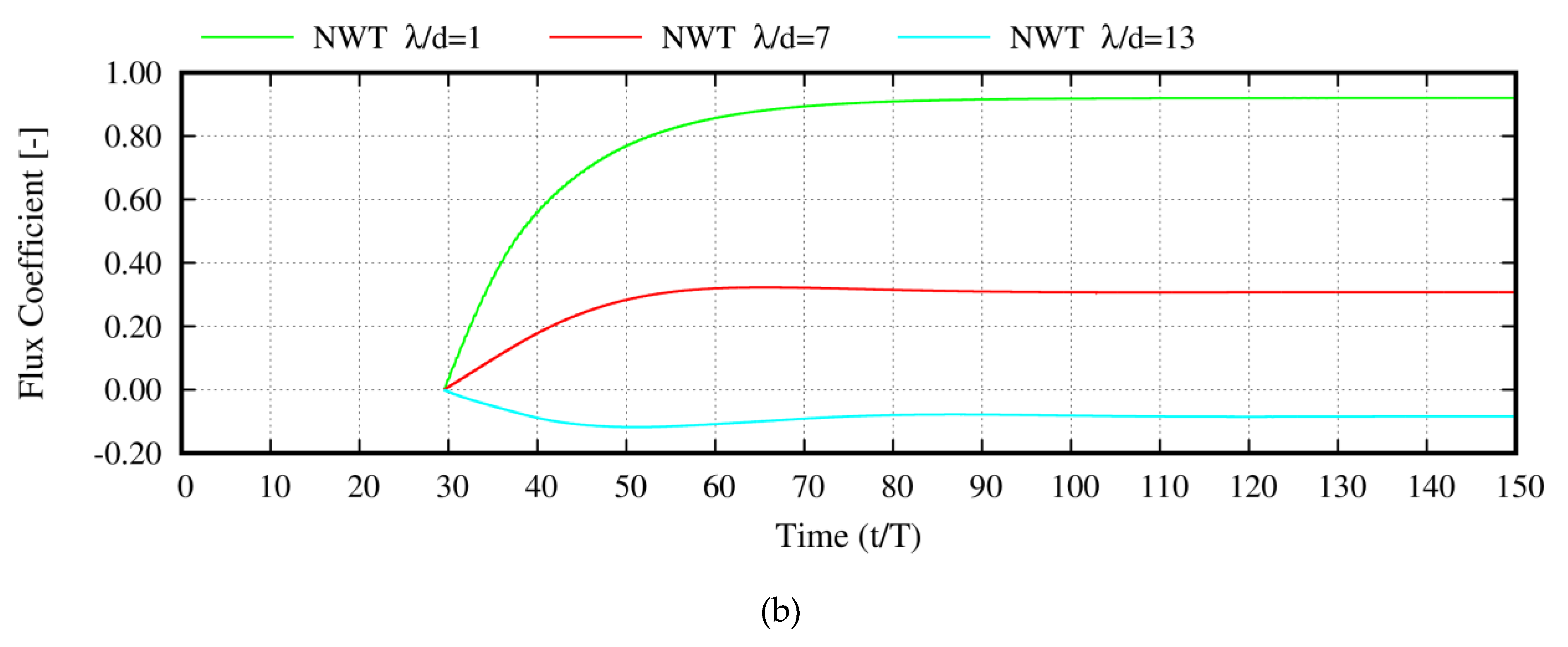
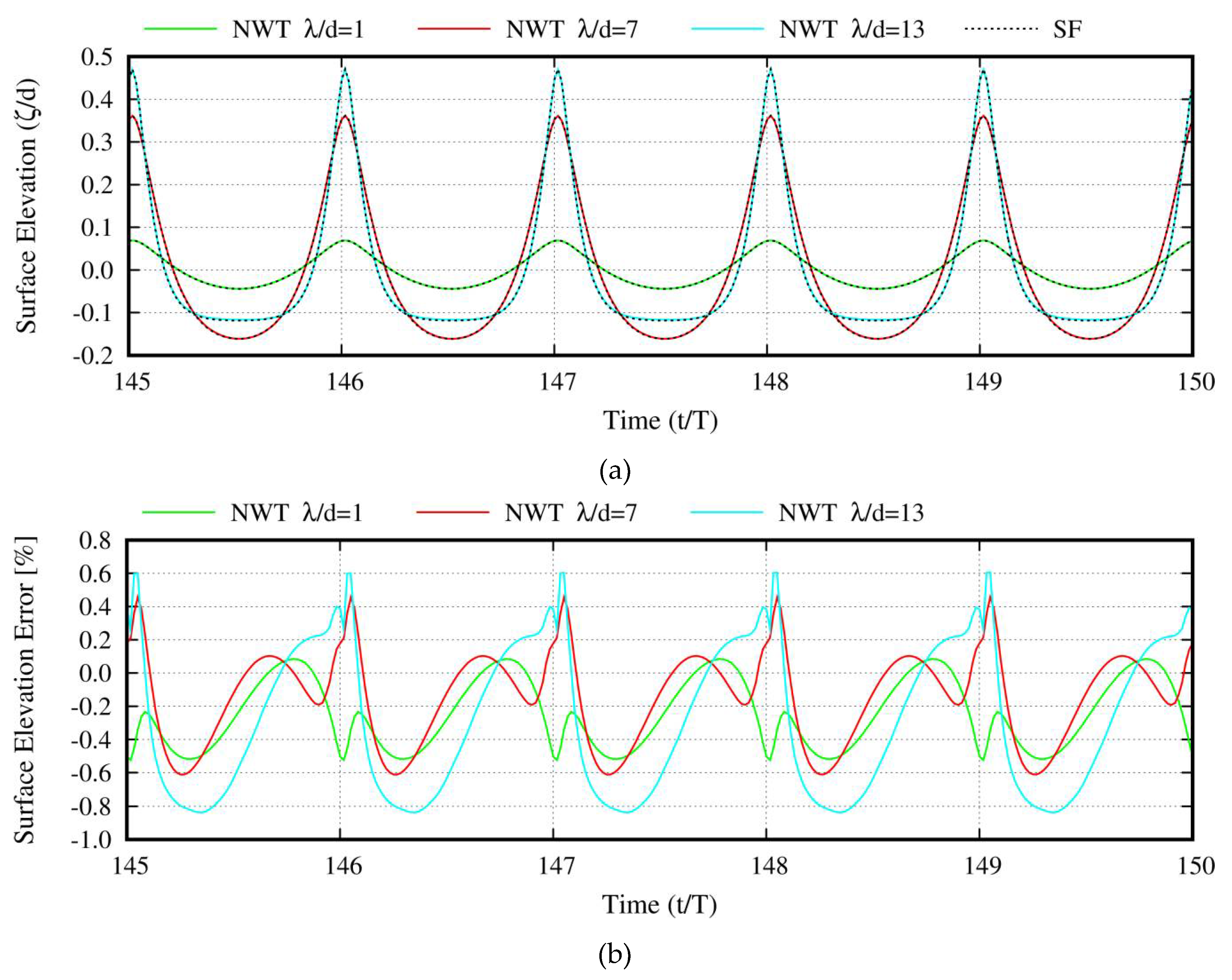
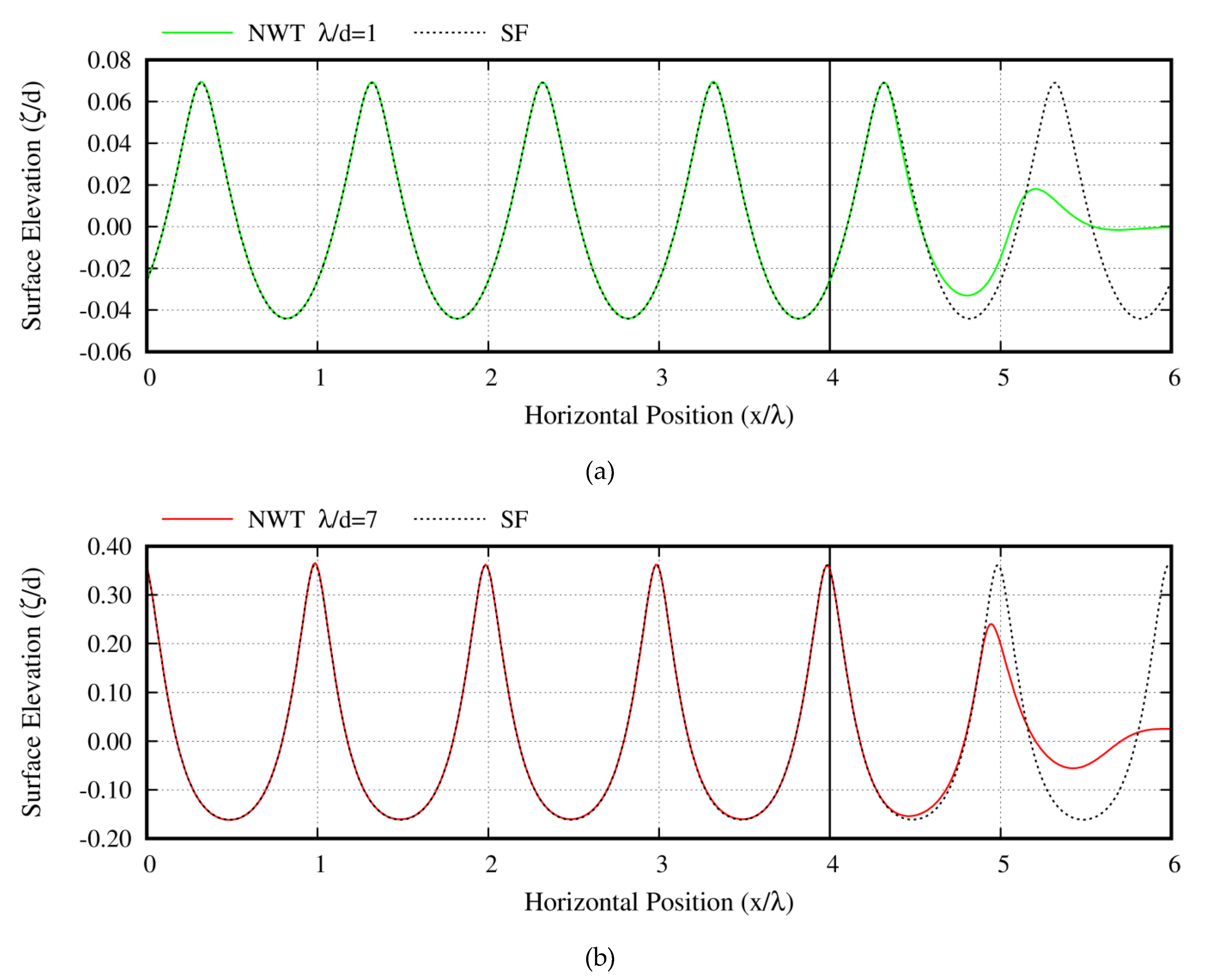
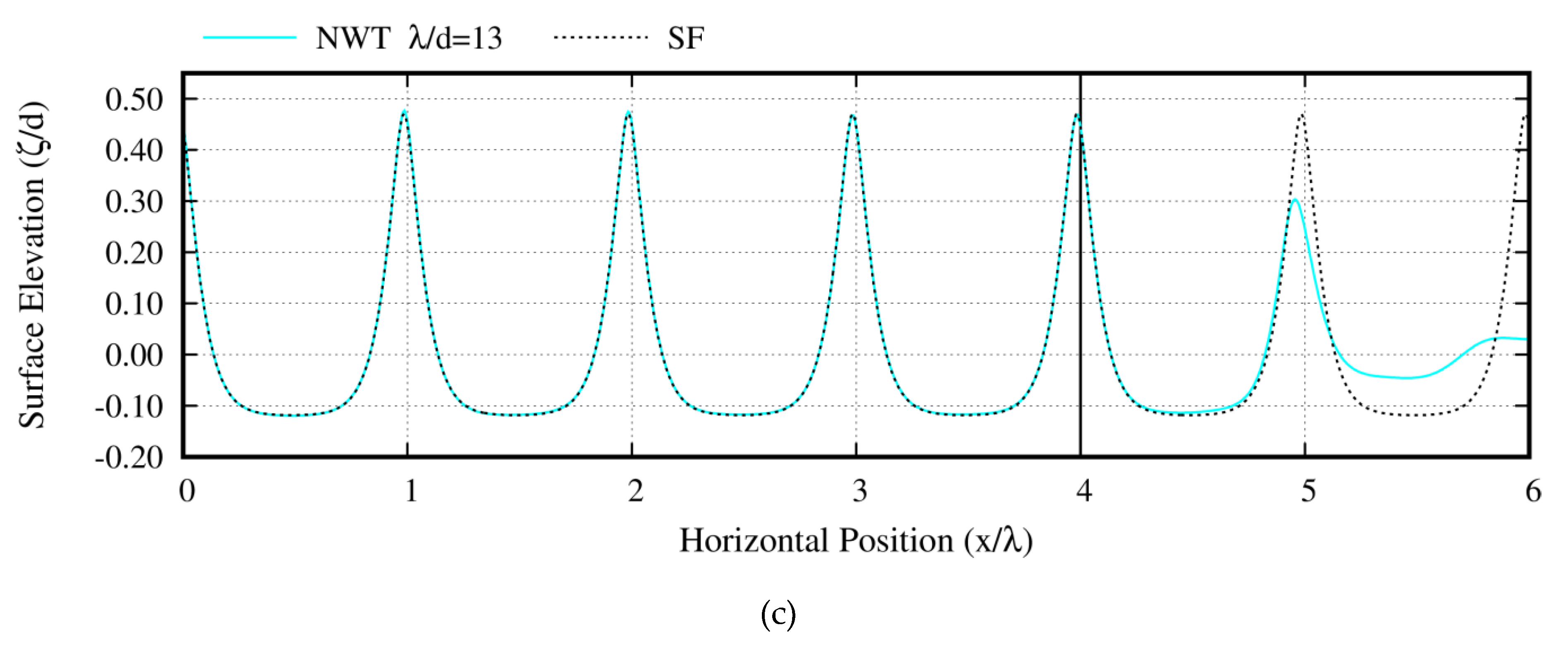
4.2. Generation and Absorption of Periodic Waves with Very High Wave Steepness
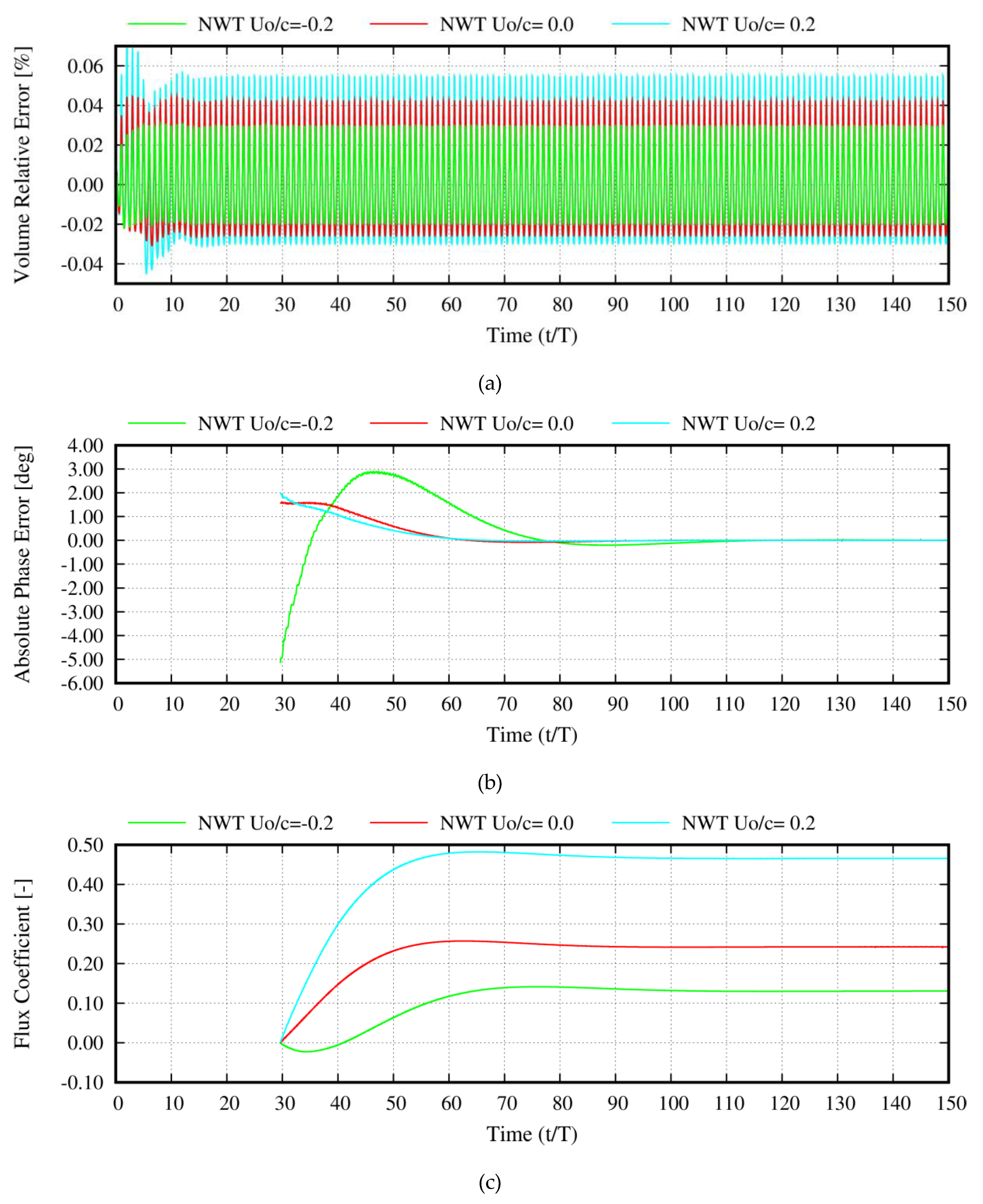
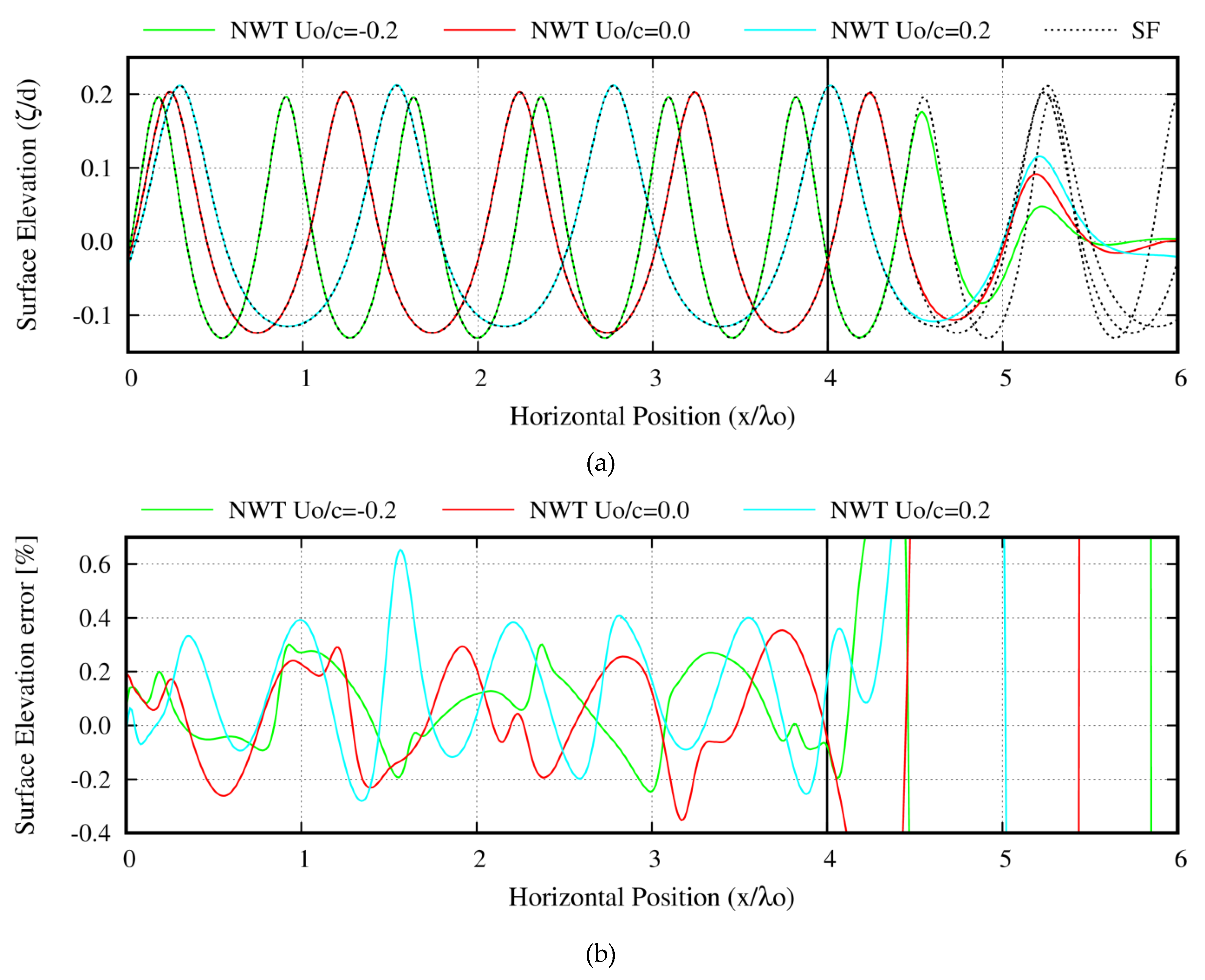
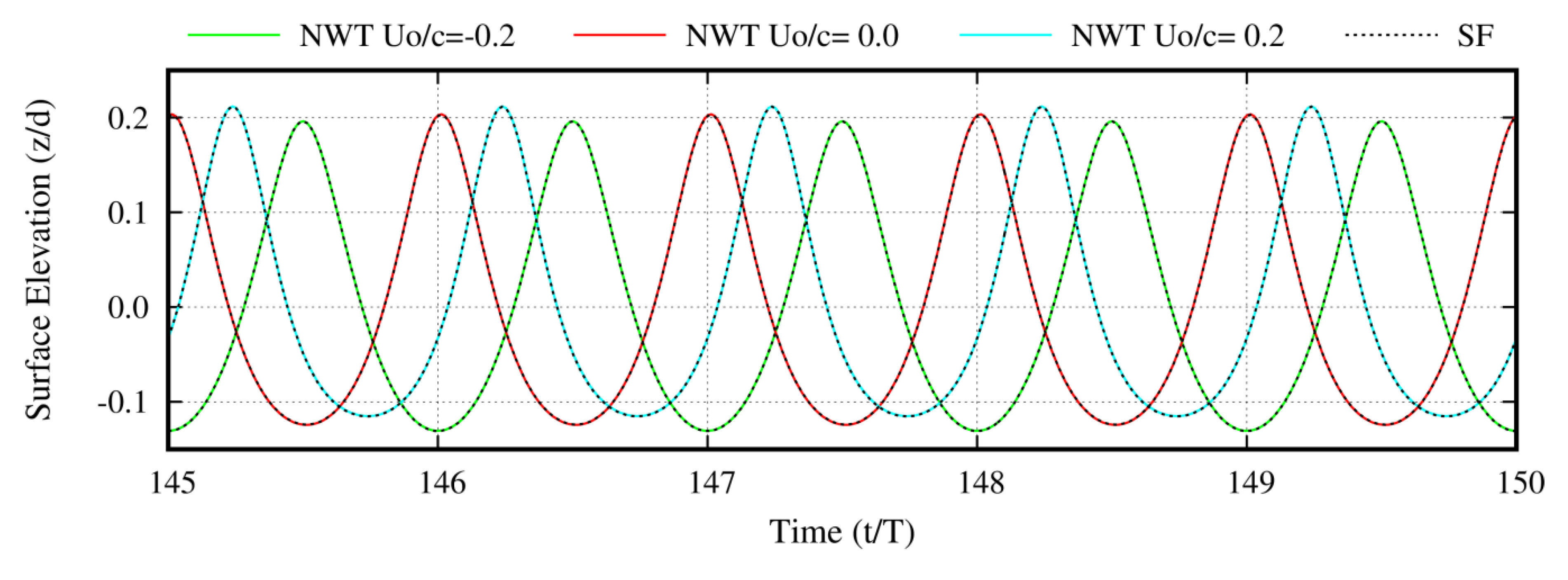
4.3. Generation and Absorption of Periodic Waves Interacting with A Steady, Uniform Current
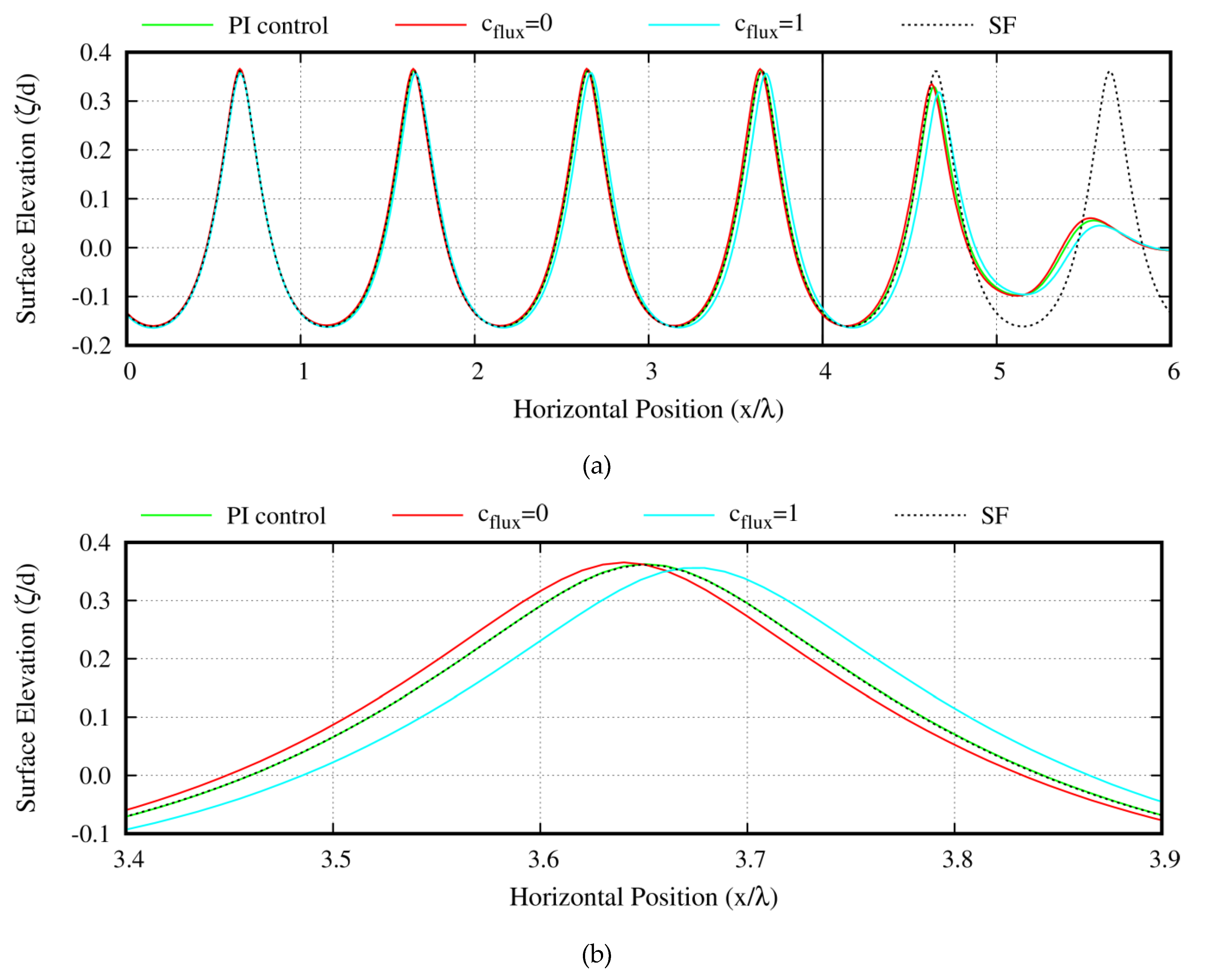
4.4. Sensitivity of the Modified Boundary Condition
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ma, Q. Advances in Numerical Simulation of Nonlinear Water Waves; World Scientific: Singapore, 2010. [Google Scholar] [CrossRef]
- Kim, C.; Clement, A.; Tanizawa, K. Recent Research and Development of Numerical Wave Tanks-a Review. Int. J. Offshore Polar Eng. 1999, 9, 241–256. [Google Scholar]
- Tanizawa, K. The state of the art on numerical wave tank. In Proceedings of the 4th Osaka Colloquium on Seakeeping Performance of Ships, Osaka, Japan, 17–20 October 2000; pp. 95–114. [Google Scholar]
- Tsai, W.-T.; Yue, D.K. Computation of Nonlinear Free-Surface Flows. Annu. Rev. Fluid Mech. 1996, 28, 249–278. [Google Scholar] [CrossRef]
- Grilli, S. Fully Nonlinear Potential Flow Models used for Long Wave Runup Prediction. In Long-Wave Runup Models—Proceedings of the International Workshop; Yeh, H., Liu, P., Synolakis, C., Eds.; World Scientific: Singapore, 1997; pp. 116–180. [Google Scholar] [CrossRef]
- Grilli, S.T.; Horrillo, J.; Guignard, S. Fully Nonlinear Potential Flow Simulations of Wave Shoaling over Slopes: Spilling Breaker Model and Integral Wave Properties. Water Waves 2019, 1–35. [Google Scholar] [CrossRef] [Green Version]
- Longuet-Higgins, M.S.; Cokelet, E. The deformation of steep surface waves on water. I. A numerical method of computation. Proc. R. Soc. Lond. A Math. Phys. Sci. 1976, 350, 1–26. [Google Scholar] [CrossRef]
- Orlanski, I. A Simple Boundary Condition for Unbounded Hyperbolic Flows. J. Comput. Phys. 1976, 21, 251–269. [Google Scholar] [CrossRef]
- Romate, J. Absorbing Boundary Conditions for Free Surface Waves. J. Comput. Phys. 1992, 99, 135–145. [Google Scholar] [CrossRef] [Green Version]
- Bessho, M. Feasibility Study of a Floating-Type Wave Absorber. In Proceedings of the 34th Japan Towing Tank Conference; 1973. (In Japanese). [Google Scholar]
- Naito, S.; Nakamura, S. Wave energy absorption in irregular waves by feedforward control system. In Hydrodynamics of Ocean Wave-Energy Utilization; Evans, D.V., de Falcão, A.F.O., Eds.; Springer: Berlin, Germany, 1986; pp. 269–280. [Google Scholar] [CrossRef]
- Clément, A. Coupling of Two Absorbing Boundary Conditions for 2D Time-Domain Simulations of Free Surface Gravity Waves. J. Comput. Phys. 1996, 126, 139–151. [Google Scholar] [CrossRef]
- Baker, G.R.; Meiron, D.I.; Orszag, S.A. Generalized Vortex Methods for Free-Surface Flow Problems. J. Fluid Mech. 1982, 123, 477–501. [Google Scholar] [CrossRef]
- Cointe, R. Numerical Simulation of a Wave Channel. Eng. Anal. Bound. Elem. 1990, 7, 167–177. [Google Scholar] [CrossRef]
- Israeli, M.; Orszag, S.A. Approximation of Radiation Boundary Conditions. J. Comput. Phys. 1981, 41, 115–135. [Google Scholar] [CrossRef]
- Le Méhauté, B. Progressive Wave Absorber. J. Hydraul. Res. 1972, 10, 153–169. [Google Scholar] [CrossRef]
- Clamond, D.; Fructus, D.; Grue, J.; Kristiansen, Ø. An Efficient Model for Three-Dimensional Surface Wave Simulations. Part II: Generation and Absorption. J. Comput. Phys. 2005, 205, 686–705. [Google Scholar] [CrossRef]
- Spinneken, J.; Christou, M.; Swan, C. Force-Controlled Absorption in a Fully-Nonlinear Numerical Wave Tank. J. Comput. Phys. 2014, 272, 127–148. [Google Scholar] [CrossRef]
- Hague, C.; Swan, C. A Multiple Flux Boundary Element Method Applied to the Description of Surface Water Waves. J. Comput. Phys. 2009, 228, 5111–5128. [Google Scholar] [CrossRef]
- Mei, C.C. The Applied Dynamics of Ocean Surface Waves; World Scientific: Singapore, 1989. [Google Scholar] [CrossRef]
- Chapalain, G.; Cointe, R.; Temperville, A. Observed and Modeled Resonantly Interacting Progressive Water-Waves. Coast. Eng. 1992, 16, 267–300. [Google Scholar] [CrossRef]
- Goda, Y. Perturbation analysis of nonlinear wave interactions in relatively shallow water. In Proceedings of the 3rd International Conference on Hydrodynamics, Seoul, Korea, 12–15 October 1998; pp. 33–51. [Google Scholar]
- Ryu, S.; Kim, M.; Lynett, P.J. Fully nonlinear wave-current interactions and kinematics by a BEM-based numerical wave tank. Comput. Mech. 2003, 32, 336–346. [Google Scholar] [CrossRef]
- Dean, R. Stream Function Representation of Nonlinear Ocean Waves. J. Geophys. Res. 1965, 70, 4561–4572. [Google Scholar] [CrossRef]
- Rienecker, M.; Fenton, J. A Fourier Approximation Method for Steady Water Waves. J. Fluid Mech. 1981, 104, 119–137. [Google Scholar] [CrossRef]
- Fenton, J. The Numerical Solution of Steady Water Wave Problems. Comput. Geosci. 1988, 14, 357–368. [Google Scholar] [CrossRef]
- Grilli, S.T.; Horrillo, J. Numerical Generation and Absorption of Fully Nonlinear Periodic Waves. J. Eng. Mech. 1997, 123, 1060–1069. [Google Scholar] [CrossRef] [Green Version]
- Klopman, G. Numerical Simulation of Gravity Wave Motion on Steep Slopes; Delft Hydr. Report No. H195; Waterloopkundig Laboratorium: Delft, The Nederlands, October 1988. [Google Scholar]
- Ferrant, P. Runup on a Cylinder due to Waves and Current: Potential Flow Solution with Fully Nonlinear Boundary Conditions. Int. J. Offshore Polar Eng. 2001, 11, 33–41. [Google Scholar]
- Fenton, J. Nonlinear Wave Theories. In The Sea, Vol. 9: Ocean Engineering Science; Le Méhauté, B., Hanes, D.M., Eds.; Wiley: New York, NY, USA, 1990. [Google Scholar]
- Brebbia, C.A. The Boundary Element Method for Engineers; Pentech Press: London, UK, 1980. [Google Scholar]
- Katz, J.; Plotkin, A. Low-Speed Aerodynamics; Cambridge University Press: Cambridge, UK, 2001; Volume 13. [Google Scholar] [CrossRef]
- Grilli, S.; Svendsen, I. Corner Problems and Global Accuracy in the Boundary Element Solution of Nonlinear Wave Flows. Eng. Anal. Bound. Elem. 1990, 7, 178–195. [Google Scholar] [CrossRef]
- Dalrymple, R.A.; Dean, R.G. Water Wave Mechanics for Engineers and Scientists; World Scientific: Singapore, 1991. [Google Scholar] [CrossRef]
- Beji, S.; Battjes, J. Experimental Investigation of Wave Propagation over A Bar. Coast. Eng. 1993, 19, 151–162. [Google Scholar] [CrossRef]
- Hjelmervik, K.B.; Trulsen, K. Freak Wave Statistics on Collinear Currents. J. Fluid Mech. 2009, 637, 267. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | λ/d | H/d | U0/c | H/Hmax | |
|---|---|---|---|---|---|
| deep water depth | 1.000 | 2.354 | 0.113 | 0.0 | 80.00% |
| intermediate water depth | 7.000 | 7.286 | 0.523 | 0.0 | 80.00% |
| shallow water depth | 13.000 | 12.040 | 0.589 | 0.0 | 80.00% |
| NT | Deep Water (λ/d = 1) | Intermediate Water (λ/d = 7) | Shallow Water (λ/d = 13) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Nλ = 40 | Nλ = 7 | Nλ = 100 | Nλ = 40 | Nλ = 70 | Nλ = 100 | Nλ = 100 | Nλ = 130 | Nλ = 160 | |
| 20 | 5.07 | - | - | 10.92 | - | - | - | - | - |
| 40 | 2.76 | 0.73 | - | 7.07 | 2.23 | 0.88 | 6.51 | - | - |
| 60 | 2.15 | 0.45 | 0.24 | 7.10 | 1.79 | 0.86 | 4.67 | 2.16 | 0.84 |
| 80 | 2.03 | 0.39 | 0.27 | 6.18 | 1.58 | 0.79 | 4.69 | 2.13 | 0.97 |
| Case | λ/d | H/d | U0/c | H/Hmax | |
|---|---|---|---|---|---|
| opposing current | 5.103 | 7.606 | 0.327 | −0.2 | 56.62% |
| no current | 7.000 | 7.606 | 0.327 | 0.0 | 50.00% |
| coplanar current | 8.678 | 7.606 | 0.327 | 0.2 | 47.32% |
| NT | Deep Water (λ/d = 1) | Intermediate Water (λ/d = 7) | Shallow Water (λ/d = 13) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Nλ = 40 | Nλ = 70 | Nλ = 100 | Nλ = 40 | Nλ = 70 | Nλ = 100 | Nλ = 100 | Nλ = 130 | Nλ = 160 | |
| 20 | 1.67 | - | - | 0.78 | - | - | - | - | - |
| 40 | 1.04 | 1.05 | - | 0.40 | 0.38 | 0.33 | 0.30 | - | - |
| 60 | 0.89 | 0.97 | 0.95 | 0.32 | 0.33 | 0.31 | 0.15 | 0.02 | −0.07 |
| 80 | 0.85 | 0.94 | 0.94 | 0.27 | 0.30 | 0.31 | 0.10 | −0.01 | −0.08 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manolas, D.I.; Riziotis, V.A.; Voutsinas, S.G. Generation and Absorption of Periodic Waves Traveling on a Uniform Current in a Fully Nonlinear BEM-based Numerical Wave Tank. J. Mar. Sci. Eng. 2020, 8, 727. https://doi.org/10.3390/jmse8090727
Manolas DI, Riziotis VA, Voutsinas SG. Generation and Absorption of Periodic Waves Traveling on a Uniform Current in a Fully Nonlinear BEM-based Numerical Wave Tank. Journal of Marine Science and Engineering. 2020; 8(9):727. https://doi.org/10.3390/jmse8090727
Chicago/Turabian StyleManolas, Dimitris I., Vasilis A. Riziotis, and Spyros G. Voutsinas. 2020. "Generation and Absorption of Periodic Waves Traveling on a Uniform Current in a Fully Nonlinear BEM-based Numerical Wave Tank" Journal of Marine Science and Engineering 8, no. 9: 727. https://doi.org/10.3390/jmse8090727