Accuracy Assessment of Satellite-Based Correction Service and Virtual GNSS Reference Station for Hydrographic Surveying


Abstract
:1. Introduction
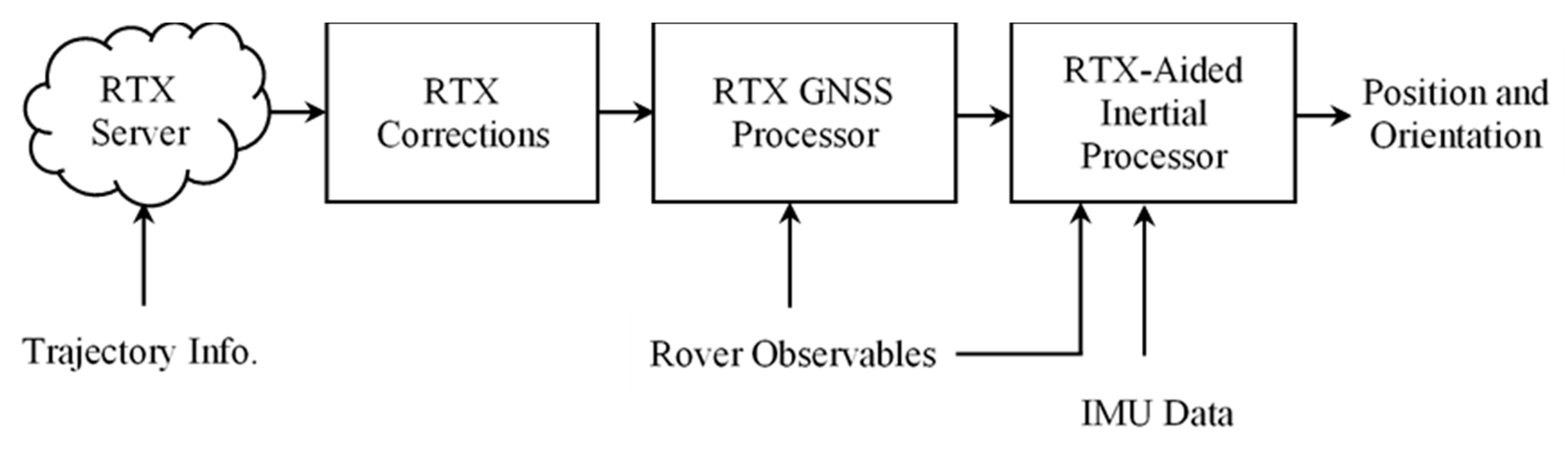
1.1. Trimble PP-RTX Technique
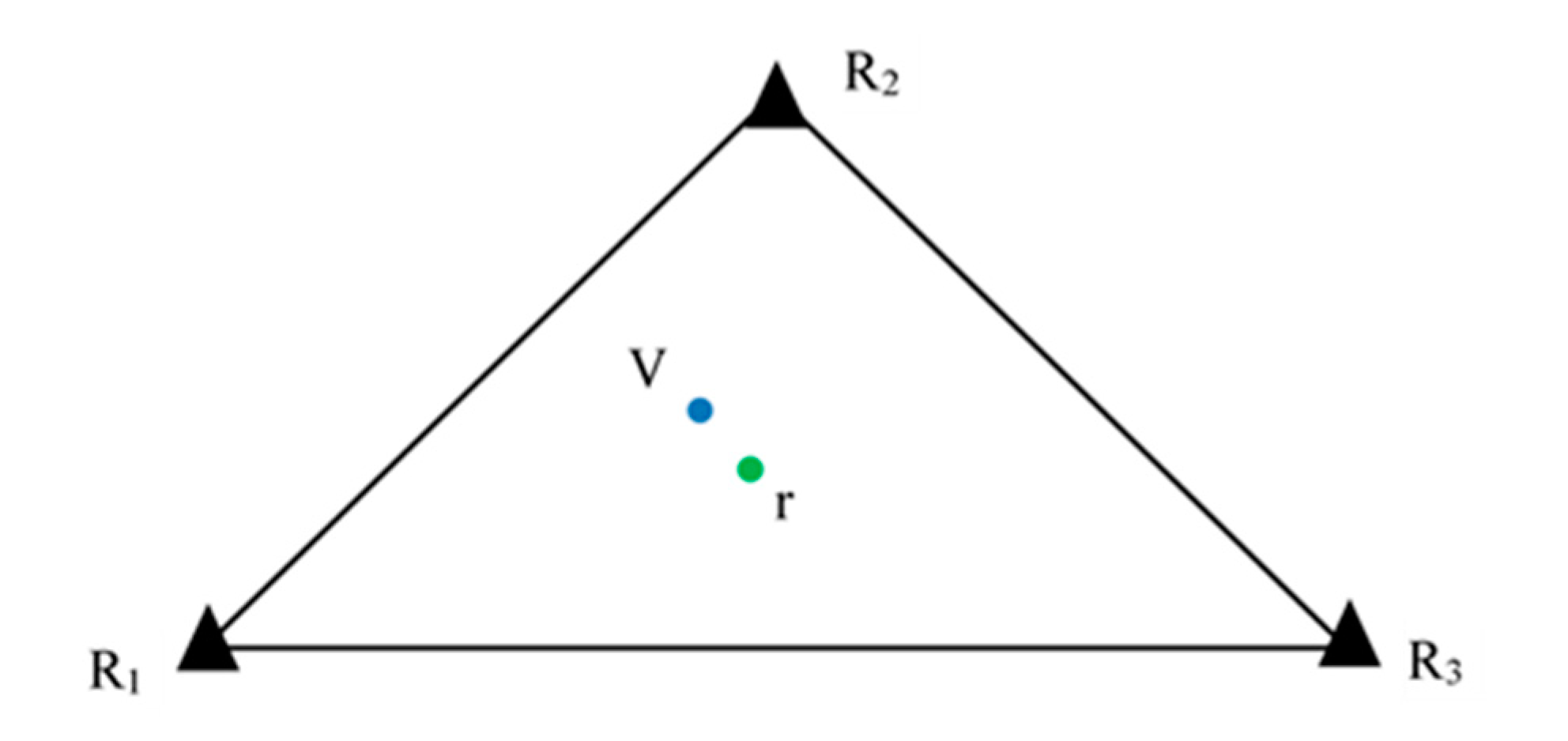
1.2. VRS Principles
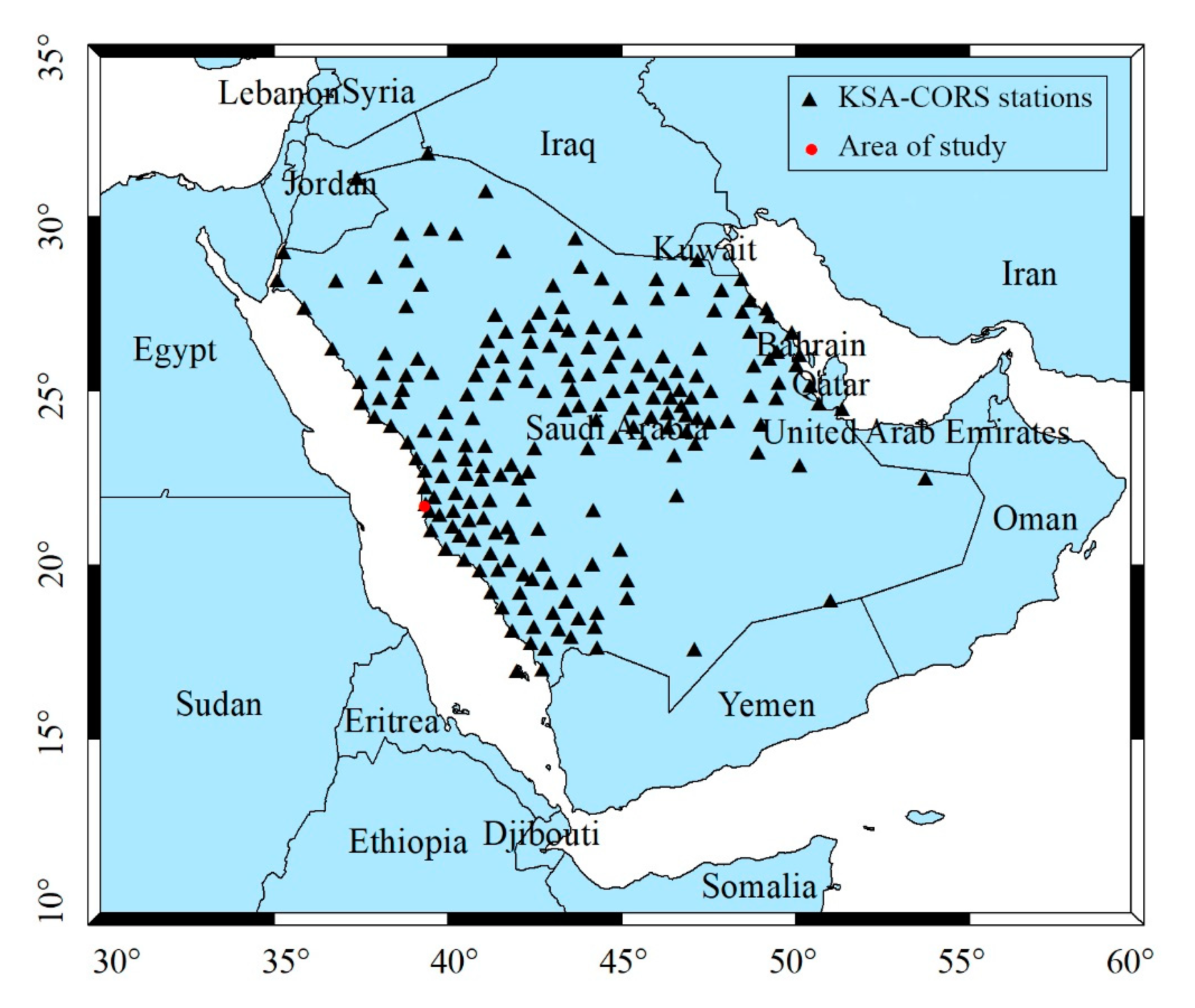
KSA Reference Network
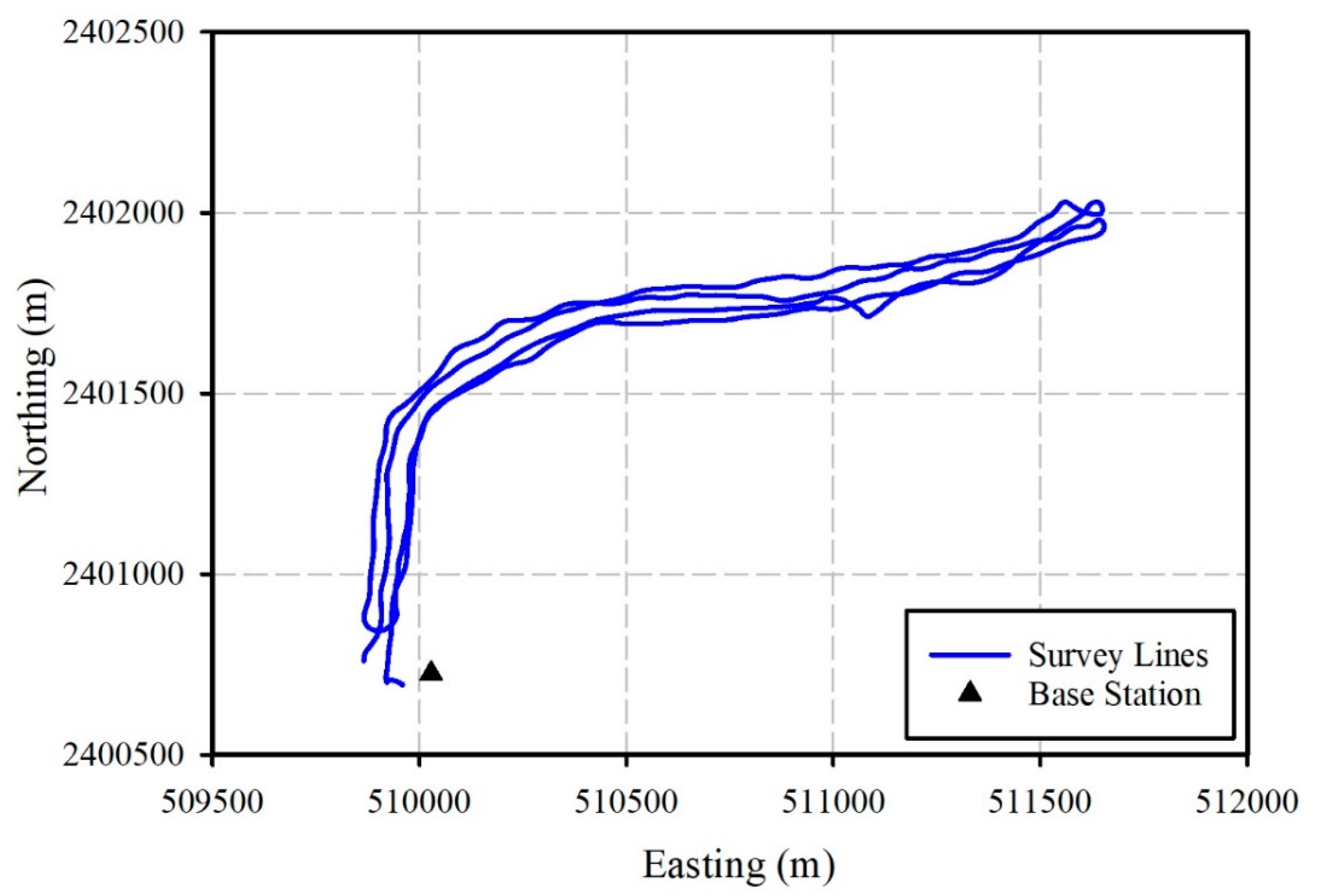
2. Field Test
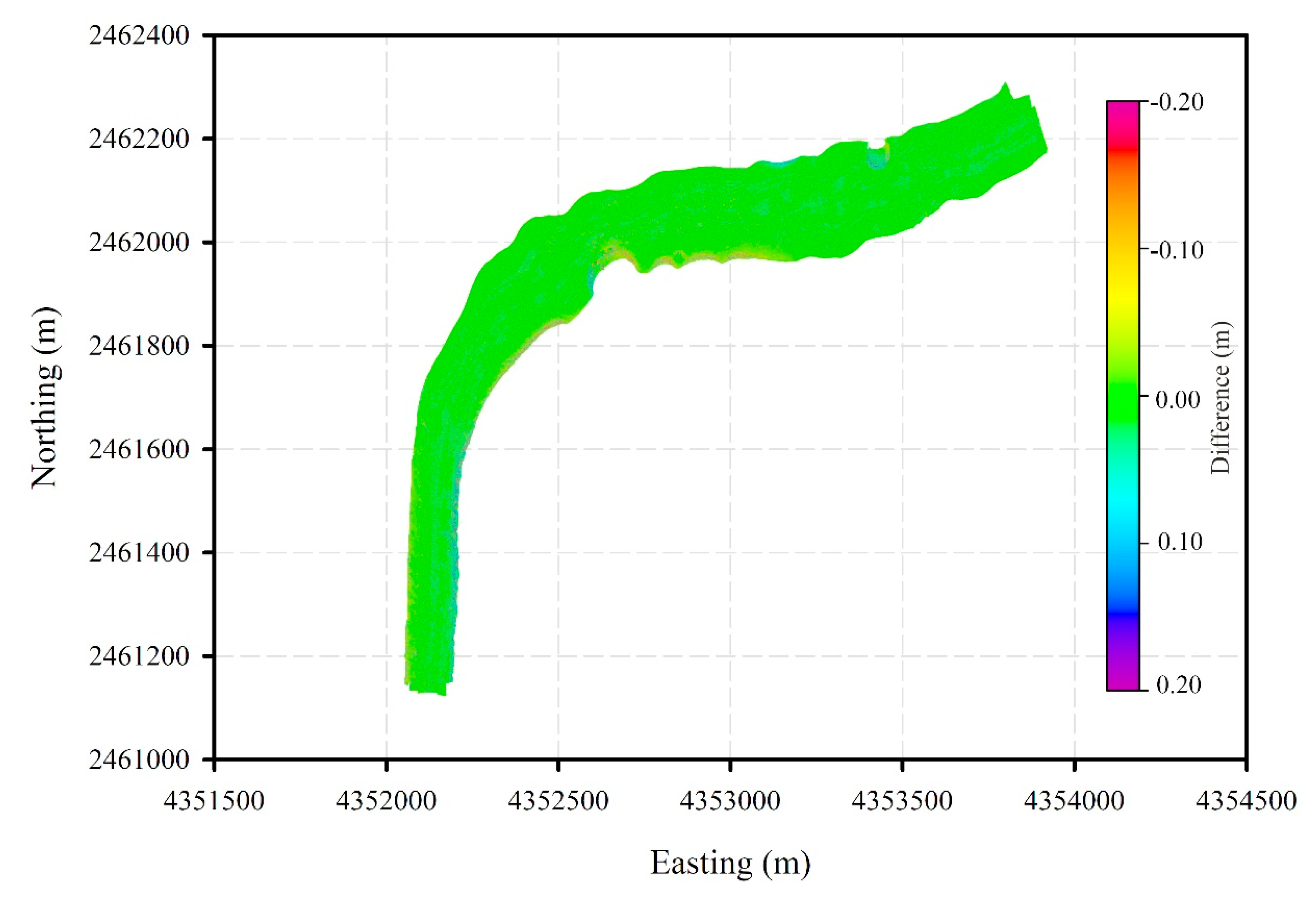
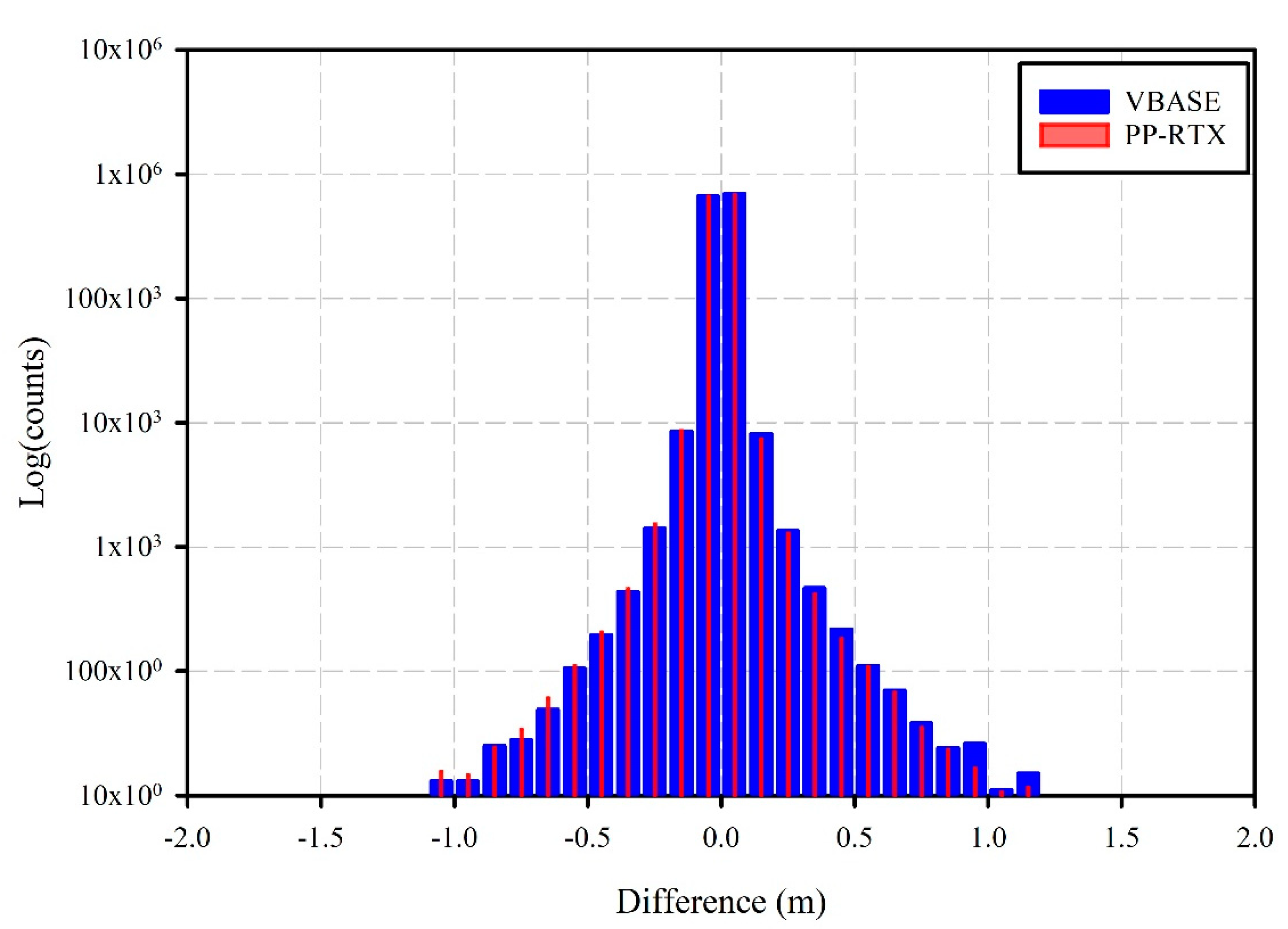
3. Data Processing and Results
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- El-Rabbany, A. Introduction to GPS: The Global Positioning System, 2nd ed.; Artech House: Boston, MA, USA, 2006; p. 230. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer: Vienna, Austria; New York, NY, USA, 2008; p. 516. [Google Scholar]
- Luo, X. GPS Stochastic Modelling: Signal Quality Measures and ARMA Processes; Springer Science & Business Media: Berlin, Germany, 2013; p. 331. [Google Scholar]
- El-Rabbany, A. An Autonomous GPS Carrier-Phased-Based System for Precision Navigation. In Proceedings of the IEEE 2006 Intelligent Transportation Systems Conference (ITSC ‘06), Toronto, ON, Canada, 17–20 September 2006; pp. 783–787. [Google Scholar]
- Hutton, J.; Gopaul, N.; Zhang, X.; Wang, J.; Menon, V.; Rieck, D.; Kipka, A.; Pastor, F. Centimeter-level, robust gnss-aided inertial post-processing for mobile mapping without local reference stations. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2016, XLI-B3, 819–826. [Google Scholar] [CrossRef]
- Zhang, F.; Brandl, M.; Chen, X.; Drescher, R.; Glocker, M.; Landau, H.; Leandro, R.; Nitschke, M.; Salazar, D.; Weinbach, U. Trimble CenterPoint RTX—A First Study on Supporting Galileo. In Proceedings of the European Navigation Conference, Vienna, Austria, 23–25 April 2013. [Google Scholar]
- Alkan, R.M. Cm-level high accurate point positioning with satellite-based GNSS correction service in dynamic applications. J. Spat. Sci. 2019, 1–9. [Google Scholar] [CrossRef]
- Leandro, R.; Landau, H.; Nitschke, M.; Glocker, M.; Seeger, S.; Chen, X.; Deking, A.; BenTahar, M.; Zhang, F.; Ferguson, K.; et al. RTX Positioning: The Next Generation of Cm-Accurate Real-Time GNSS Positioning. In Proceedings of the 24th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 1460–1475. [Google Scholar]
- Trimble. Trimble RTX Frequently Asked Questions. Available online: https://positioningservices.trimble.com/wp-content/uploads/2019/02/Trimble-RTX-FAQ-2020-Brochure.pdf (accessed on 5 June 2020).
- Feld, C. What is the PP-RTX service and how to use it in POSPac. Applanix PP-RTX Technical Note. Available online: https://support.geocue.com/wp-content/uploads/2020/04/Applanix_TechNote_PPRTX.pdf (accessed on 5 June 2020).
- Hu, G.R.; Khoo, H.S.; Goh, P.C.; Law, C.L. Development and assessment of GPS virtual reference stations for RTK positioning. J. Geod. 2003, 77, 292–302. [Google Scholar] [CrossRef]
- Vollath, U.; Buecherl, A.; Landau, H.; Pagels, C.; Wagner, B. Multi-Base RTK Positioning Using Virtual Reference Stations. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 123–131. [Google Scholar]
- Jin, S. Global Navigation Satellite Systems: Signal, Theory and Applications; Intech: Rijeka, Croatia, 2012; p. 426. [Google Scholar]
- Kleusberg, A.; Teunissen, P.J.G. GPS for Geodesy, 2nd ed; completely rev. and extended ed.; Springer: Berlin, Germany; New York, NY, USA, 1998; p. 650. [Google Scholar]
- Han, S.; Rizos, C. Instantaneous Ambiguity Resolution for Medium-Range GPS Kinematic Positioning Using Multiple Reference Stations; Springer: Berlin/Heidelberg, Germany, 1998; pp. 283–288. [Google Scholar]
- Gao, Y. Carrier phase based regional area differential GPS for decimeter-level positioning and navigation. In Proceedings of the 10th International Tech Meeting Satellite Division Inst Navigation, Kansas City, MO, USA, 16–19 September 1997; pp. 1305–1313. [Google Scholar]
- Gao, Y.; Li, Z. Ionosphere effect and modeling for regional area differential GPS network. In Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1998), Nashville, TN, USA, 15–18 September 1998; pp. 91–98. [Google Scholar]
- Dai, L.; Han, S.; Wang, J.; Rizos, C. A study on GPS/GLONASS multiple reference station techniques for precise real-time carrier phase-based positioning. In Proceedings of the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2001), Salt Lake City, UT, USA, 11–14 September 2001; pp. 392–403. [Google Scholar]
- Wanninger, L. Improved ambiguity resolution by regional differential modelling of the ionosphere. In Proceedings of the 8th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1995), Palm Springs, CA, USA, 12–15 September 1995; pp. 55–62. [Google Scholar]
- Wanninger, L. Enhancing differential GPS using regional ionospheric error models. Bull. Geod. 1995, 69, 283–291. [Google Scholar] [CrossRef]
- Wübbena, G.; Bagge, A.; Seeber, G.; Böder, V.; Hankemeier, P. Reducing distance dependent errors for real-time precise DGPS applications by establishing reference station networks. In Proceedings of the 9th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1996), Kansas City, MO, USA, 17–20 September 1996; pp. 1845–1852. [Google Scholar]
- Fotopoulos, G. Parameterization of Carrier Phase Corrections Based on a Regional Network of Reference Stations. Accepted for publication. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS-00), Salt Lake City, UT, USA, 19–22 September 2000. [Google Scholar]
- Raquet, J.F. Development of a Method for Kinematic GPS Carrier-Phase Ambiguity Resolution Using Multiple Reference Receivers; UCGE Rep 20116, University of Calgary: Calgary, AB, Canada. Available online: http://hdl.handle.net/1880/25880:1998 (accessed on 10 May 2020).
- Elsobeiey, M. Performance Analysis of Low-Cost Single-Frequency GPS Receivers in Hydrographic Surveying. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-4/W5, 67–71. [Google Scholar] [CrossRef] [Green Version]
- International Hydrographic Bureau (IHO). IHO Standards for Hydrographic Surveys, Special Publication No. 44, 5th ed; February 2008; International Hydrographic Bureau: Monaco, 2008; Available online: https://iho.int/uploads/user/pubs/standards/s-44/S-44_5E.pdf (accessed on 15 May 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PP-RTX | VBase | |
|---|---|---|
| THU (cm) | 5.50 | 5.75 |
| TVU (cm) | 5.90 | 7.05 |
| Survey Order | Special | 1a | 1b | 2 |
|---|---|---|---|---|
| Constant [m] | 2 | 5 | 5 | 20 |
| Varible [% of depth] | 0 | 5 | 5 | 10 |
| THU (m) | 2 | 10 | 10 | 30 |
| Survey Order | Special | 1a | 1b | 2 |
|---|---|---|---|---|
| Constant (a) [m] | 0.25 | 0.50 | 0.50 | 1.00 |
| Varible (b) [% of depth] | 0.75 | 1.30 | 1.30 | 2.30 |
| TVU (m) | 0.39 | 1.39 | 1.39 | 2.51 |
| PP-RTX | VBase | |
|---|---|---|
| Minimum (m) | −3.82 | −4.76 |
| Maximum (m) | 4.56 | 4.57 |
| Mean (cm) | −0.07 | −0.03 |
| Standard Deviation (cm) | 3.60 | 3.61 |
| Total Count | 1,375,305 | 1,375,213 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elsobeiey, M.E. Accuracy Assessment of Satellite-Based Correction Service and Virtual GNSS Reference Station for Hydrographic Surveying. J. Mar. Sci. Eng. 2020, 8, 542. https://doi.org/10.3390/jmse8070542
Elsobeiey ME. Accuracy Assessment of Satellite-Based Correction Service and Virtual GNSS Reference Station for Hydrographic Surveying. Journal of Marine Science and Engineering. 2020; 8(7):542. https://doi.org/10.3390/jmse8070542
Chicago/Turabian StyleElsobeiey, Mohamed Elsayed. 2020. "Accuracy Assessment of Satellite-Based Correction Service and Virtual GNSS Reference Station for Hydrographic Surveying" Journal of Marine Science and Engineering 8, no. 7: 542. https://doi.org/10.3390/jmse8070542