Numerical Modelling and Dynamic Response Analysis of Curved Floating Bridges with a Small Rise-Span Ratio


Abstract
:1. Introduction
2. Research Significance
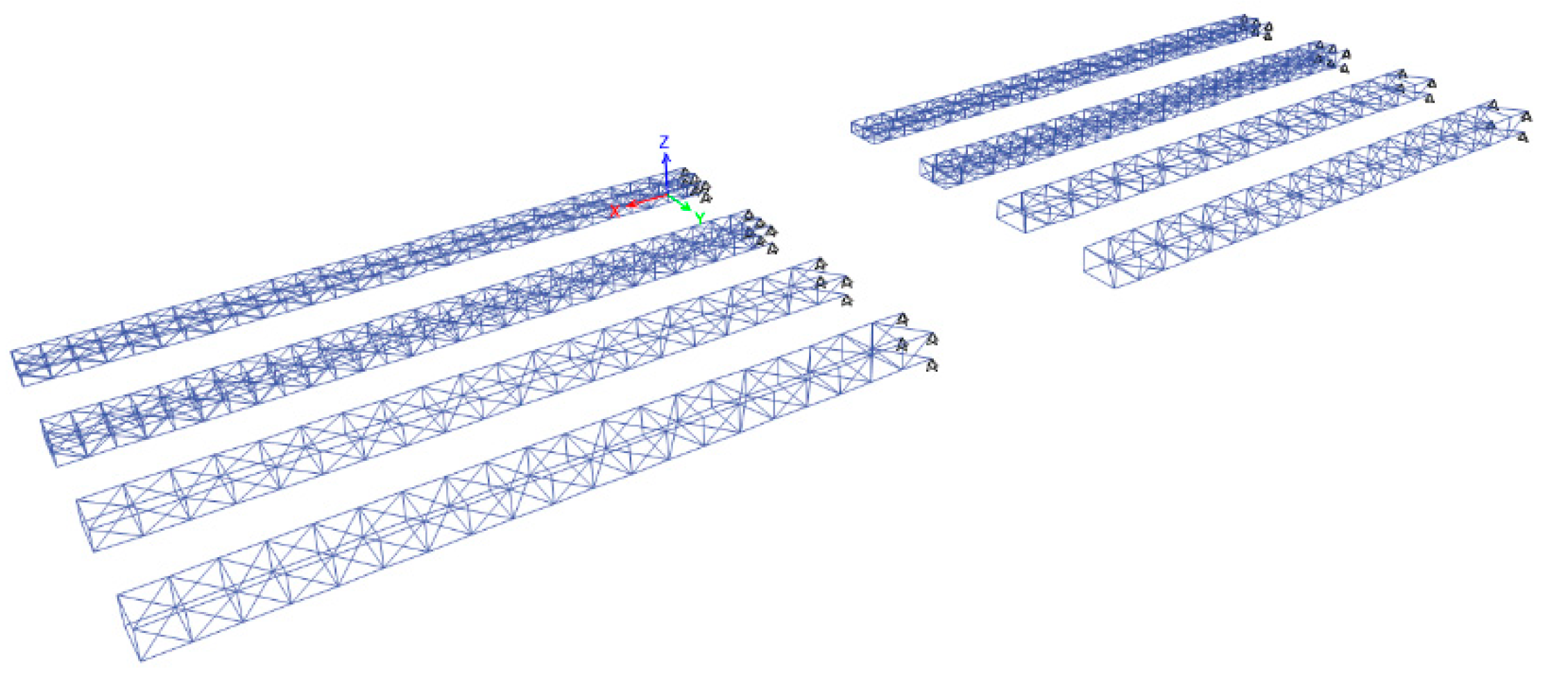
3. Floating Bridge Description
4. Numerical Model
5. Numerical Results
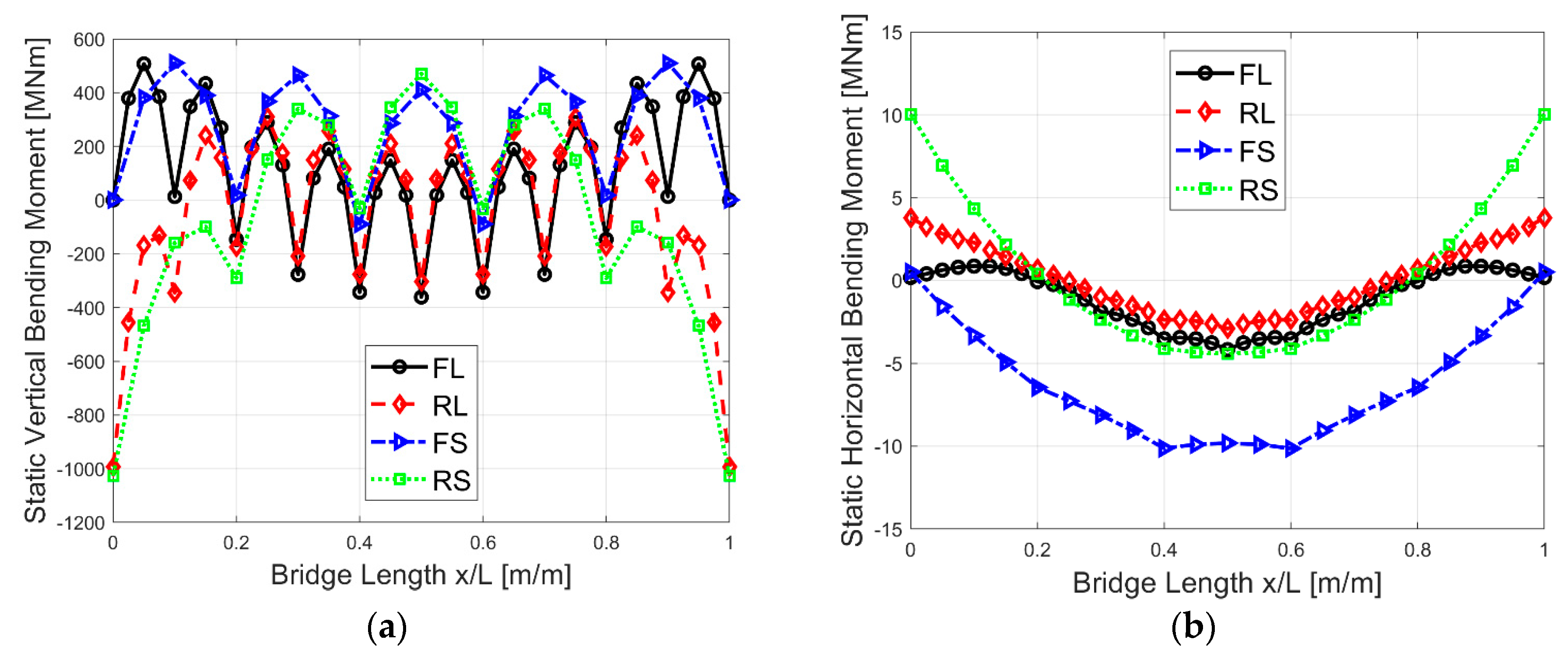
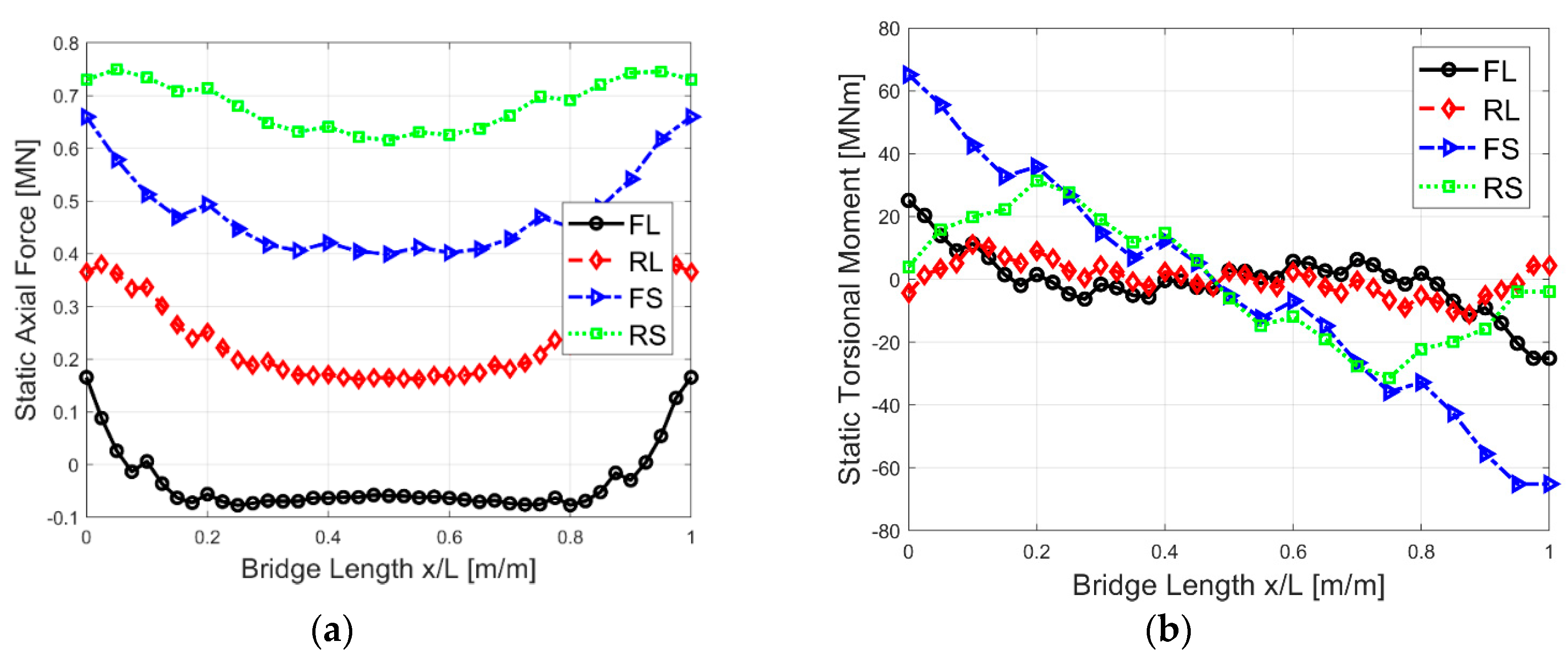
5.1. Static Responses
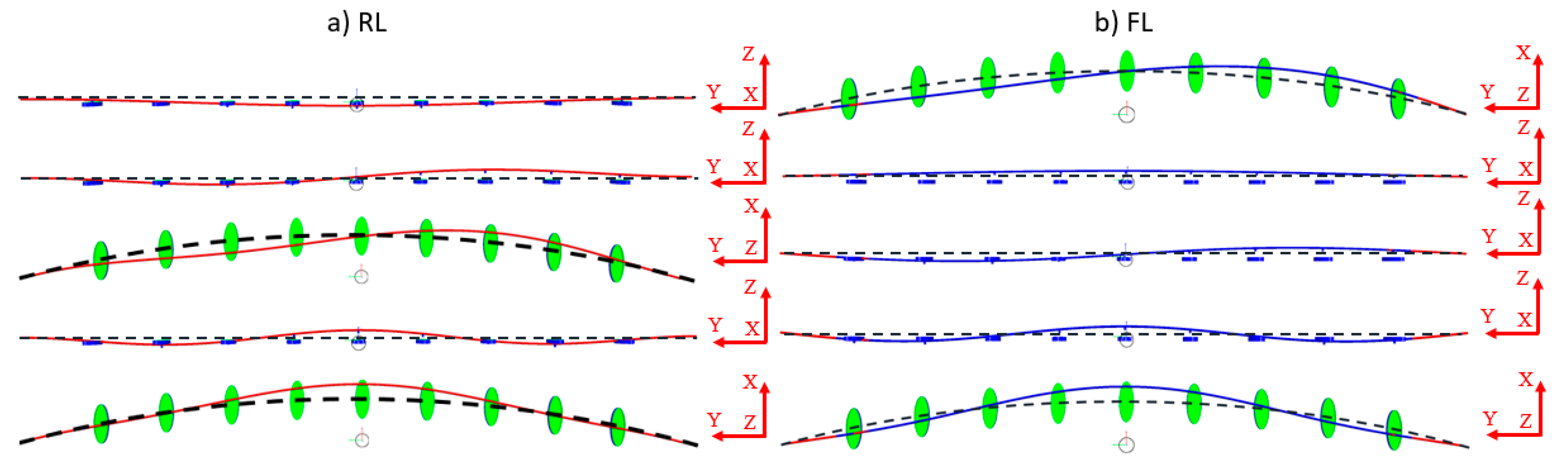
5.2. Eigen Value Analysis
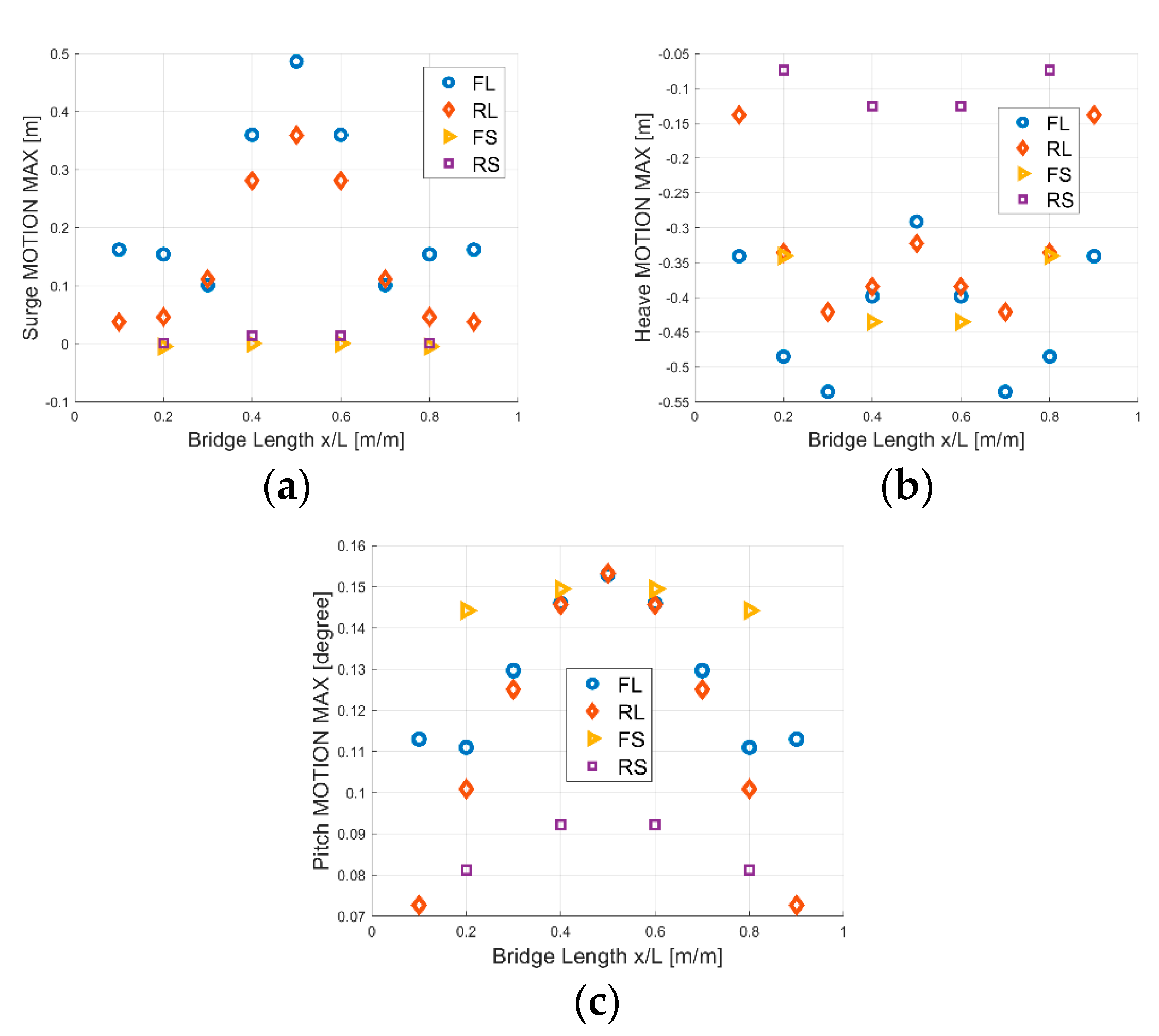
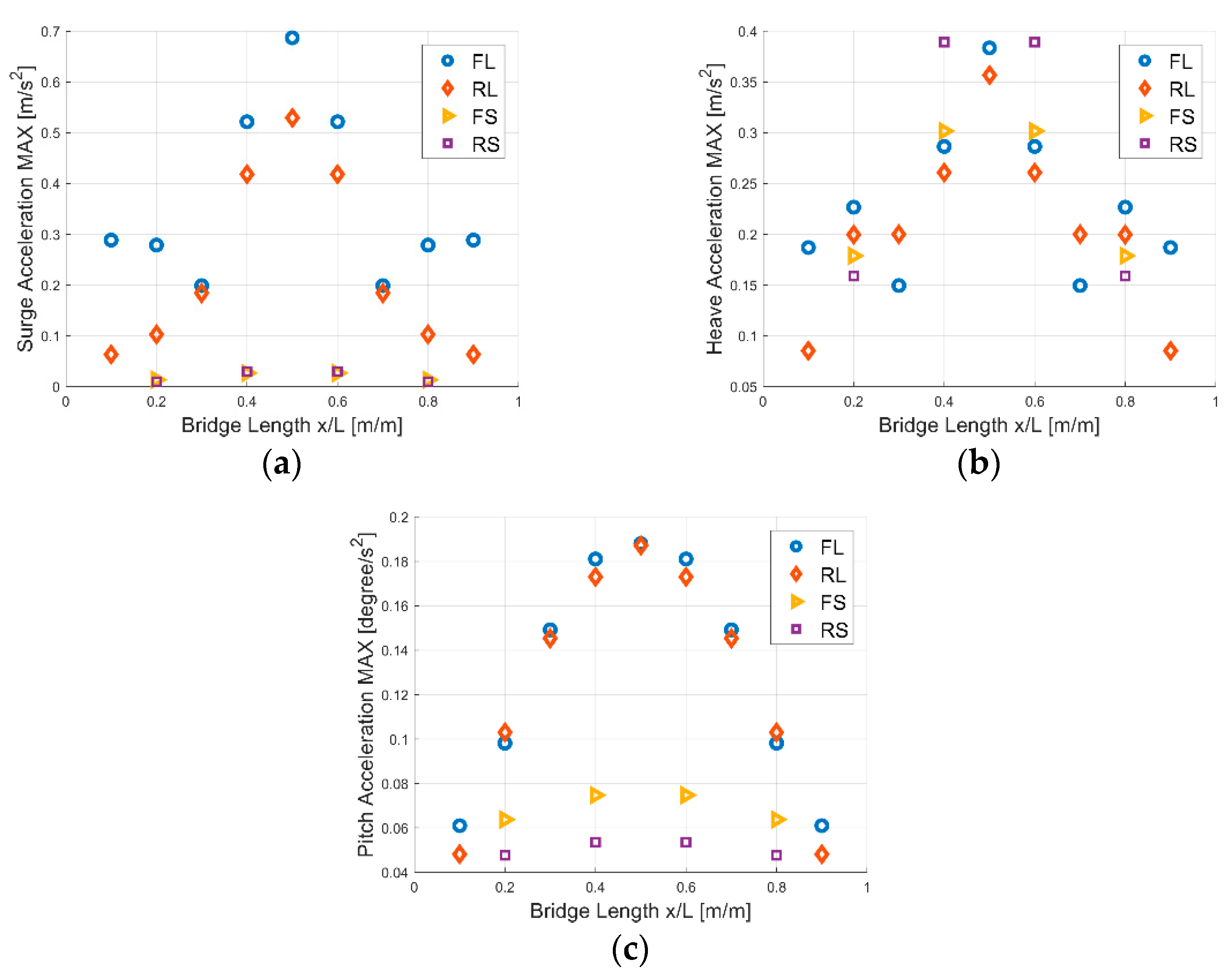
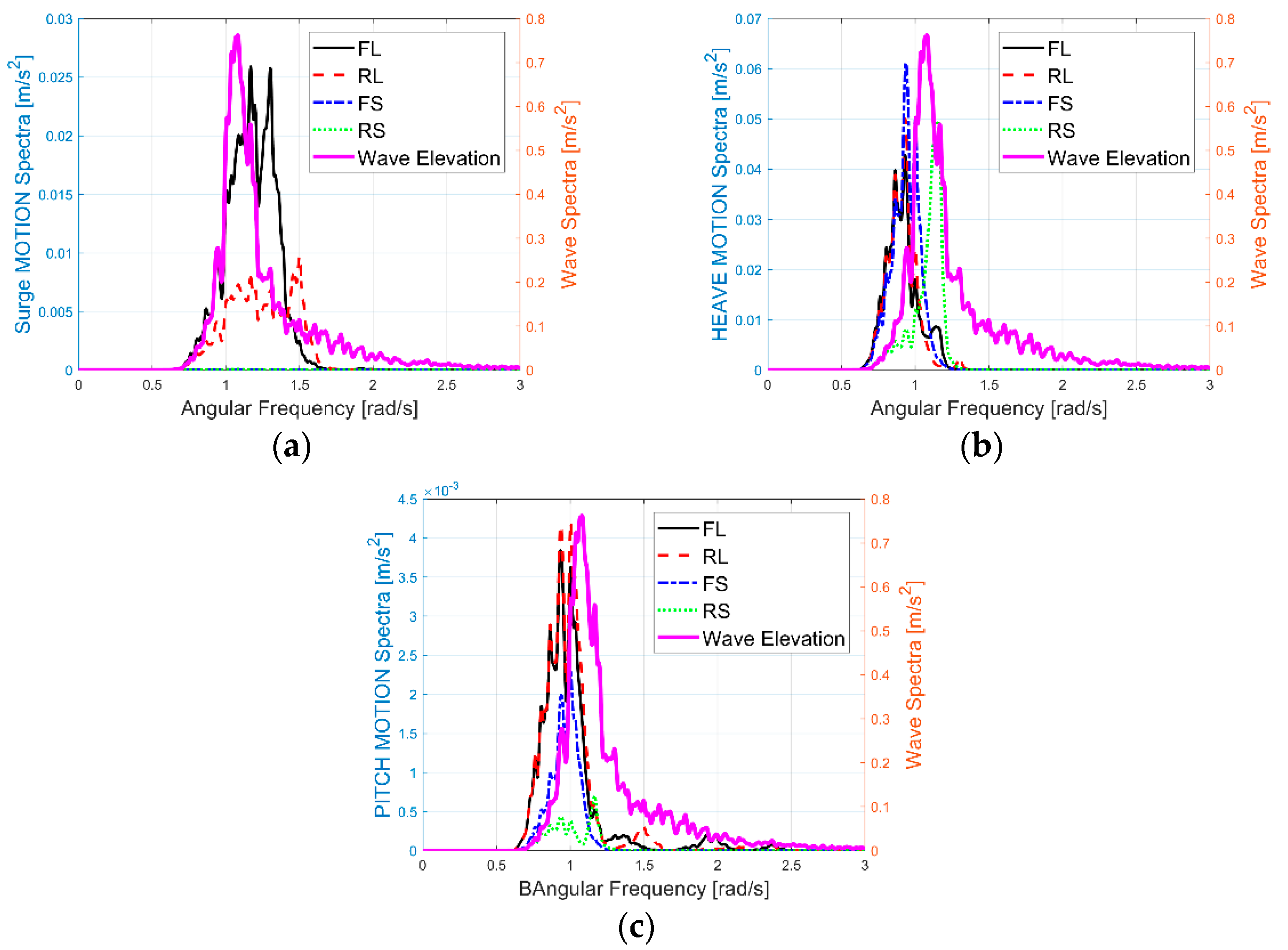
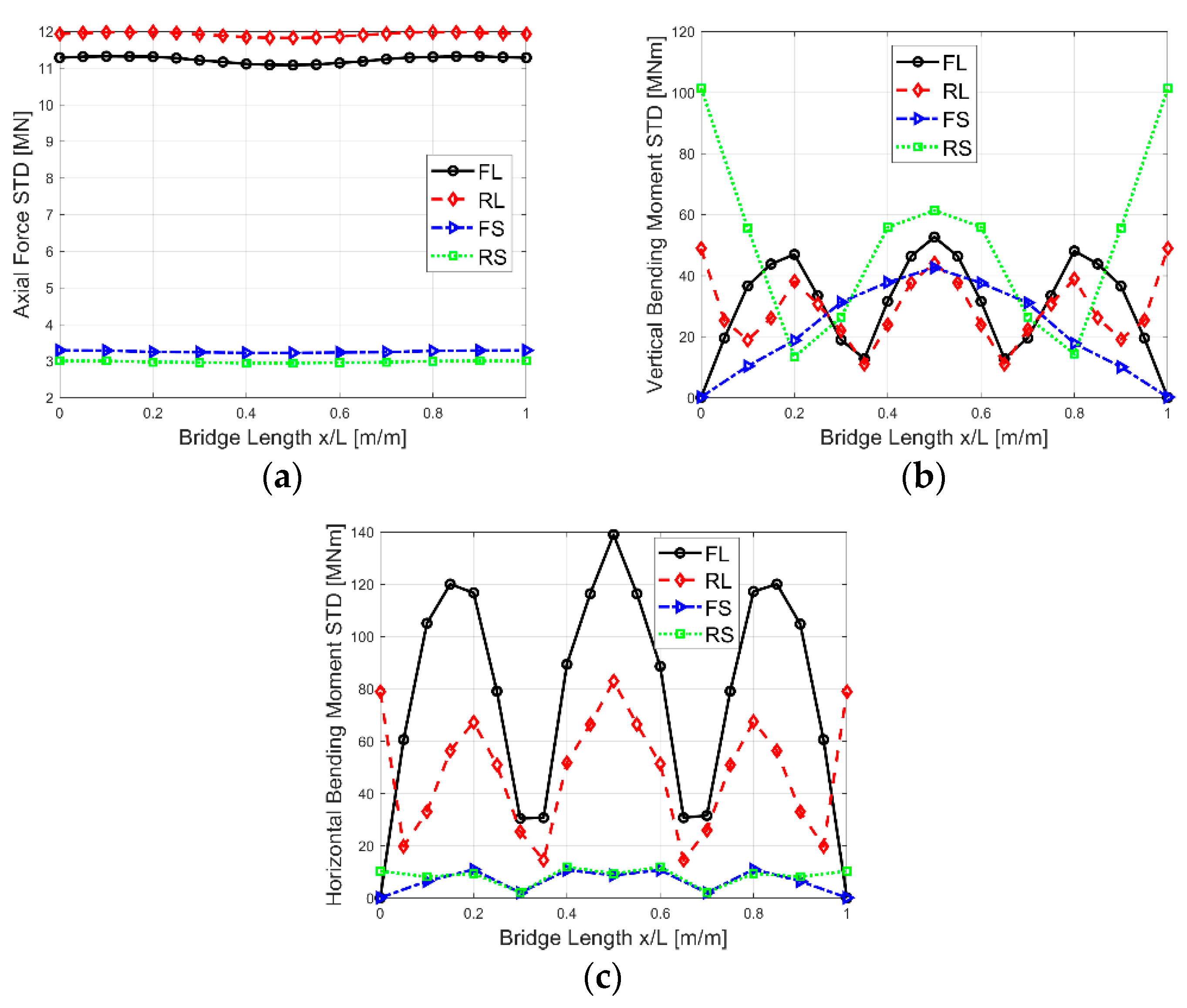
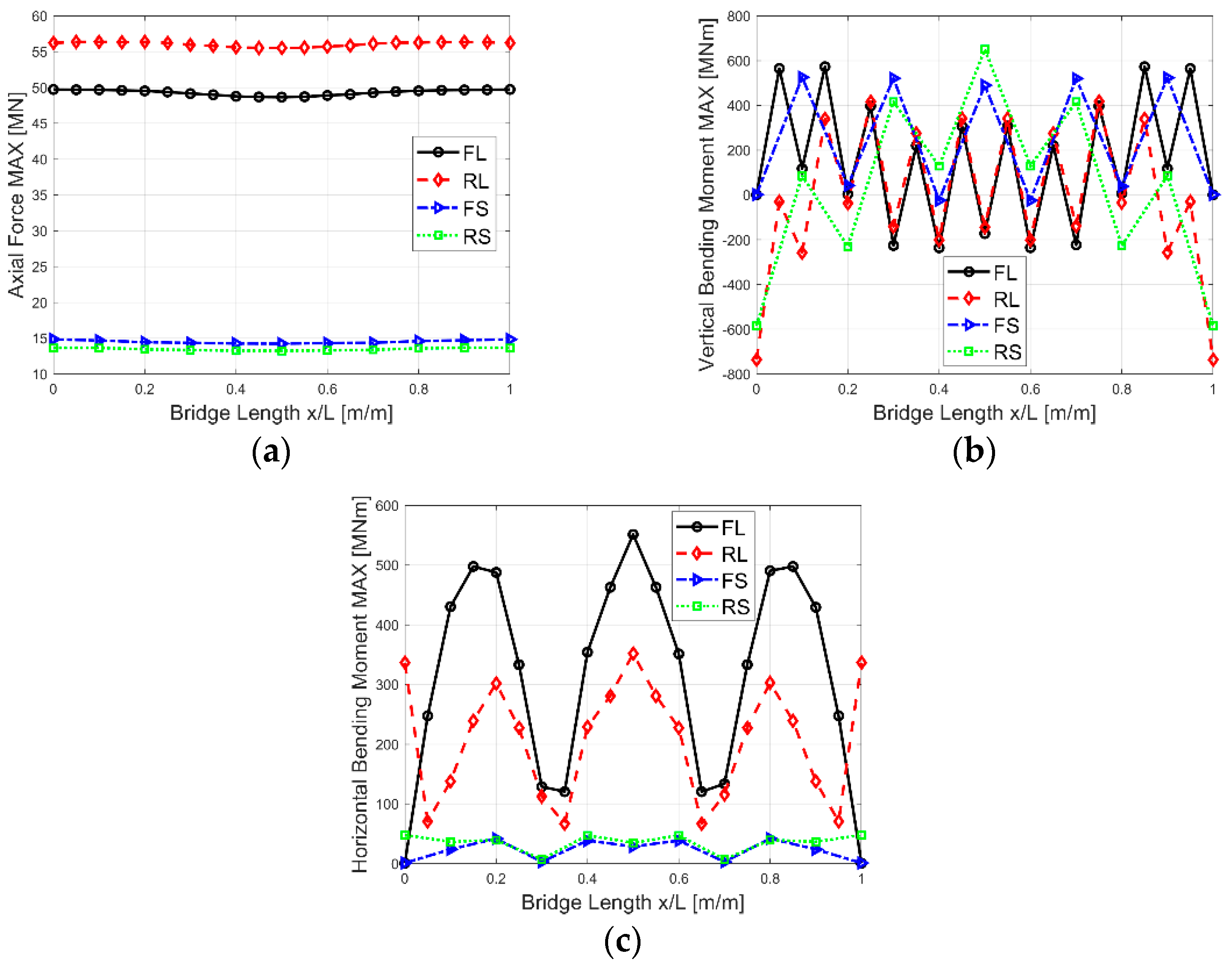
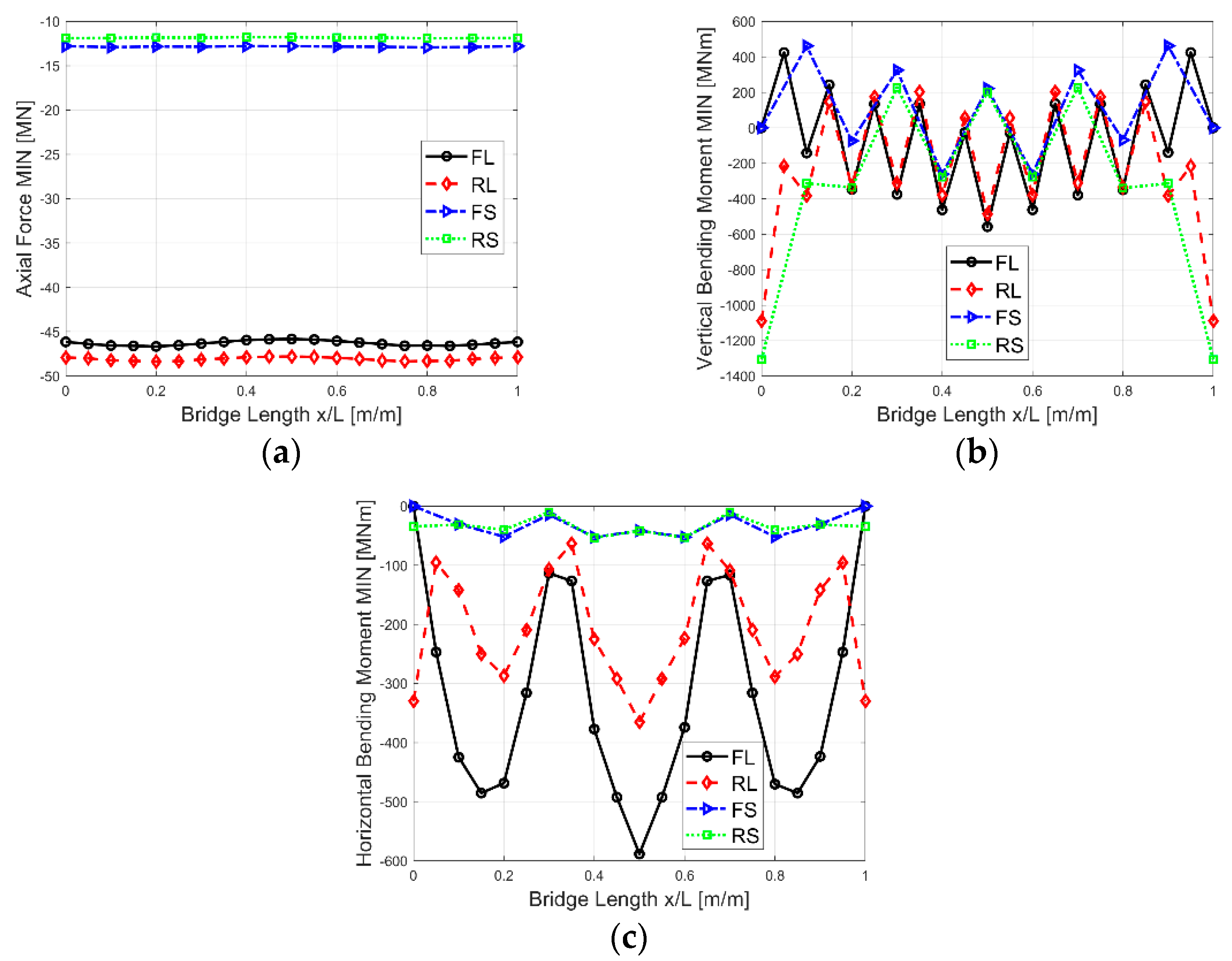
5.3. Irregular Wave Analysis
6. Conclusions and Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Jiang, D.; Tan, K.; Ong, K.; Heng, S.; Dai, J.; Lim, B.; Ang, K. Behavior of prestressed concrete self-stabilizing floating fuel storage tanks. In Proceedings of the 4th Congrès International de Géotechnique–Ouvrages–Structures, Ho Chi Minh City, Vietman, 26–27 October 2017; pp. 1097–1106. [Google Scholar]
- Jiang, D.; Tan, K.H.; Dai, J.; Ong, K.C.G.; Heng, S. Structural performance evaluation of innovative prestressed concrete floating fuel storage tanks. Struct. Concr. 2019, 20, 15–31. [Google Scholar] [CrossRef]
- Jiang, D.; Tan, K.H.; Wang, C.M.; Ong, K.C.G.; Bra, H.; Jin, J.; Kim, M.O. Analysis and design of floating prestressed concrete structures in shallow waters. Mar. Struct. 2018, 59, 301–320. [Google Scholar] [CrossRef]
- Wan, L.; Han, M.; Jin, J.; Zhang, C.; Magee, A.R.; Hellan, Ø.; Wang, C.M. Global dynamic response analysis of oil storage tank in finite water depth: Focusing on fender mooring system parameter design. Ocean Eng. 2018, 148, 247–262. [Google Scholar] [CrossRef]
- Zhang, C.; Wan, L.; Magee, A.R.; Han, M.; Jin, J.; Ang, K.K.; Hellan, Ø. Experimental and numerical study on the hydrodynamic loads on a single floating hydrocarbon storage tank and its dynamic responses. Ocean Eng. 2019, 183, 437–452. [Google Scholar] [CrossRef]
- Dai, J.; Ang, K.K.; Jin, J.; Wang, C.M.; Hellan, Ø.; Watn, A. Large floating structure with free-floating, self-stabilizing tanks for hydrocarbon storage. Energies 2019, 12, 3487. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, E.; Wang, C.; Utsunomiya, T.; Moan, T. Very large floating structures: Applications, analysis and design. Core Rep. 2004, 2, 104–109. [Google Scholar]
- Watanabe, E.; Utsunomiya, T. Analysis and design of floating bridges. Prog. Struct. Eng. Mater. 2003, 5, 127–144. [Google Scholar] [CrossRef]
- Kashiwagi, M. Research on Hydroelastic Responses of VLFS: Recent Progress and Future Work. In Proceedings of the Ninth International Offshore and Polar Engineering Conference, Brest, France, 30 May–4 June 1999. [Google Scholar]
- Watanabe, E.; Utsunomiya, T.; Wang, C. Hydroelastic analysis of pontoon-type VLFS: A literature survey. Eng. Struct. 2004, 26, 245–256. [Google Scholar] [CrossRef]
- Fu, S.; Cui, W.-C.; Chen, X.; Wang, C. Hydroelastic analysis of a nonlinearly connected floating bridge subjected to moving loads. Mar. Struct. 2005, 18, 85–107. [Google Scholar]
- Watanabe, E.; Utsunomiya, T.; Wang, C.M.; Xiang, Y. Hydroelastic Analysis of Pontoon-type Circular VLFS. In Proceedings of the Thirteenth International Offshore and Polar Engineering Conference, Honolulu, HI, USA, 25–30 May 2003. [Google Scholar]
- Seif, M.S.; Inoue, Y. Dynamic analysis of floating bridges. Mar. Struct. 1998, 11, 29–46. [Google Scholar] [CrossRef]
- Xu, Y.; Øiseth, O.; Moan, T. Time Domain Modelling of Frequency Dependent Wind and Wave Forces on a Three-span Suspension Bridge with two Floating Pylons Using State Space Models. In Proceedings of the ASME 36th International Conference on Ocean, Offshore and Arctic Engineering, Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Petersen, Ø.W.; Øiseth, O. Sensitivity-based finite element model updating of a pontoon bridge. Eng. Struct. 2017, 150, 573–584. [Google Scholar] [CrossRef] [Green Version]
- Løken, A.; Oftedal, R.; Aarsnes, J. Aspects of Hydrodynamic Loading and Responses in Design of Floating Bridges. In Proceedings of the Second Symposium on Strait Crossings, Trondheim, Norway, 10 June 1990; pp. 10–13. [Google Scholar]
- Solland, G.; Haugland, S.; Gustavsen, J.H. The Bergsøysund Floating Bridge, Norway. Struct. Eng. Int. 1993, 3, 142–144. [Google Scholar] [CrossRef]
- Cheng, Z.; Svangstu, E.; Gao, Z.; Moan, T. Field measurements of inhomogeneous wave conditions in Bjørnafjorden. J. Waterw. PortCoast. Ocean Eng. 2018, 145, 05018008. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Z.; Gao, Z.; Moan, T. Wave load effect analysis of a floating bridge in a fjord considering inhomogeneous wave conditions. Eng. Struct. 2018, 163, 197–214. [Google Scholar] [CrossRef]
- Dai, J.; Leira, B.J.; Moan, T.; Kvittem, M.I. Inhomogeneous wave load effects on a long, straight and side-anchored floating pontoon bridge. Mar. Struct. 2020, 72, 102763. [Google Scholar] [CrossRef]
- Istrati, D.; Buckle, I.G. Effect of Fluid-structure Interaction on Connection Forces in Bridges Due to Tsunami Loads. In Proceedings of the 30th US-Japan Bridge Engineering Workshop, Washington, DC, USA, 21–23 October 2014. [Google Scholar]
- Higgins, C.; Lehrman, J.; Bradner, C.; Schumacher, T.; Cox, D. Hybrid Testing of a Prestressed Girder Bridge to Resist Wave Forces. In Proceedings of the 29th US-Japan bridge engineering workshop, Tsukuba, Japan, 11–13 November 2013. [Google Scholar]
- Sha, Y.; Amdahl, J. Numerical investigations of a prestressed pontoon wall subjected to ship collision loads. Ocean Eng. 2019, 172, 234–244. [Google Scholar] [CrossRef]
- Sha, Y.; Amdahl, J.; Dørum, C. Local and Global Responses of a Floating Bridge Under Ship–Girder Collisions. J. Offshore Mech. Arct. Eng. 2019, 141, 031601. [Google Scholar] [CrossRef]
- Lwin, M. Floating bridges. Bridge Eng. Handb. 2000, 22, 1–23. [Google Scholar]
- The ISSC Committee VI.2. Very Large Floating Structures. In Proceedings of the 16th International Ship and Offshore Structures Congress, Southampton, UK, 20–25 August 2006. [Google Scholar]
- Wan, L.; Magee, A.R.; Hellan, Ø.; Arnstein, W.; Ang, K.K.; Wang, C.M. Initial Design of a Double Curved Floating Bridge and Global Hydrodynamic Responses under Environmental Conditions. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, OMAE2017-61802, Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Kvåle, K.A.; Sigbjörnsson, R.; Øiseth, O. Modelling the stochastic dynamic behaviour of a pontoon bridge: A case study. Comput. Struct. 2016, 165, 123–135. [Google Scholar] [CrossRef]
- Computers & Structures, Inc. CSI Analysis Reference Manual, rev. 15. Berkeley, CA, USA, July 2016; Available online: https://wiki.csiamerica.com/display/doc/CSI+Analysis+Reference+Manual (accessed on 10 May 2019).
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1993; Volume 1. [Google Scholar]
- Naess, A.; Moan, T. Stochastic Dynamics of Marine Structures; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Cummins, W. The impulse response function and ship motions. Schiffstechnik 1962, 47, 101–109. [Google Scholar]
- Wan, L.; Gao, Z.; Moan, T.; Lugni, C. Experimental and numerical comparisons of hydrodynamic responses for a combined wind and wave energy converter concept under operational conditions. Renew. Energy 2016, 93, 87–100. [Google Scholar] [CrossRef]
- Wan, L.; Gao, Z.; Moan, T. Experimental and numerical study of hydrodynamic responses of a combined wind and wave energy converter concept in survival modes. Coast. Eng. 2015, 104, 151–169. [Google Scholar] [CrossRef] [Green Version]
- Karimirad, M.; Moan, T. A simplified method for coupled analysis of floating offshore wind turbines. Mar. Struct. 2012, 27, 45–63. [Google Scholar] [CrossRef]
- Gao, Z.; Moan, T.; Wan, L.; Michailides, C. Comparative numerical and experimental study of two combined wind and wave energy concepts. J. Ocean Eng. Sci. 2016, 1, 36–51. [Google Scholar] [CrossRef] [Green Version]
- Michailides, C.; Gao, Z.; Moan, T. Experimental and numerical study of the response of the offshore combined wind/wave energy concept SFC in extreme environmental conditions. Mar. Struct. 2016, 50, 35–54. [Google Scholar] [CrossRef]
- Cheng, Z.; Gao, Z.; Moan, T. Hydrodynamic load modeling and analysis of a floating bridge in homogeneous wave conditions. Mar. Struct. 2018, 59, 122–141. [Google Scholar] [CrossRef]
- Wu, M.; Moan, T. Linear and nonlinear hydroelastic analysis of high-speed vessels. J. Ship Res. 1996, 40, 149–163. [Google Scholar]
- Kashiwagi, M. Transient responses of a VLFS during landing and take-off of an airplane. J. Mar. Sci. Technol. 2004, 9, 14–23. [Google Scholar] [CrossRef]
- Wan, L.; Greco, M.; Lugni, C.; Gao, Z.; Moan, T. A combined wind and wave energy-converter concept in survivalmode: Numerical and experimental study in regular waves with afocus on water entry and exit. Appl. Ocean Res. 2017, 63, 200–216. [Google Scholar] [CrossRef]
- Marintek. Riflex Theory Manual v4.0 Rev3. 2013. Available online: https://www.manualslib.com/products/Lexicon-Lx-Rev-3-2622504.html (accessed on 10 May 2019).
- DNV. Recommended Practice Dnv-rp-c205, Environmental Conditions and Environmental Loads. 2010. Available online: https://rules.dnvgl.com/docs/pdf/dnv/codes/docs/2010-10/rp-c205.pdf (accessed on 10 May 2019).
- Marintek. SIMO—Theory Manual Version 3.6, Rev: 2. 2009. Available online: https://projects.dnvgl.com/sesam/status/Simo/SIMO-release-notes_4.16.0.pdf (accessed on 10 May 2019).
- DNV. Wave Analysis by Diffraction and Morison Theory (WADAM), Sesam User Manual. V8.3. 2011. Available online: https://home.hvl.no/ansatte/tct/FTP/V2020%20Hydrodynamikk/Sesam/SESAM%20UM%20Brukermanualer/Wadam_UM.pdf (accessed on 10 May 2019).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bridge Total Span L | 500/1000 (m) |
|---|---|
| Pontoon Number | 4/9 |
| Pontoon Overall Dimension (Elliptic Cylinder) | 60 × 22 × 9 (m) |
| Pontoon Draft | 6 (m) |
| Pontoon C.O.G | (0, 0, −2) (m) |
| GM (Horizontal and Longitudinal) | 3 and 35.5 (m) |
| Pontoon mass | 2.319 (Mkg) |
| Pontoon rotational Inertia Ixx, Iyy and Izz | 145.39, 660.29 and 721.03 (Mkg m2) |
| Bridge Deck C.O.G | (0, 0, 5) (m) |
| Bridge Deck Weight | 3.990 (Mkg/100 m) |
| Cases | Total Span (m) | EIy (× 106 MNm2) | EIzv (× 106 MNm2) | EA (× 106 MN) | GJ (× 106 MNm2/rad) | Boundary Conditions (B.Cs) |
|---|---|---|---|---|---|---|
| RS | 500 | 10 | 20 | 1 | 10 | Fixed at 6 D.O.Fs |
| RL | 1000 | 10 | 20 | 1 | 10 | |
| FS | 500 | 10 | 20 | 1 | 10 | Fixed at Translational D.O.F Free at Ry and Rz, fixed at Rx |
| FL | 1000 | 10 | 20 | 1 | 10 |
| Length | Cases | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1000(m) | RL | 7.77 | 6.84 | 6.13 | 5.18 | 4.28 | 3.67 | 2.82 | 2.63 | 2.61 | 1.96 | 1.90 | 1.54 | 1.44 | 1.28 | 1.27 |
| FL | 9.63 | 7.92 | 7.44 | 6.05 | 4.75 | 4.37 | 3.25 | 3.09 | 2.63 | 2.39 | 2.24 | 1.71 | 1.53 | 1.44 | 1.36 | |
| 500 (m) | RS | 6.03 | 3.10 | 1.82 | 1.74 | 1.55 | 1.42 | 1.22 | 0.79 | 0.78 | 0.57 | 0.54 | 0.48 | 0.40 | 0.31 | 0.31 |
| FS | 7.46 | 4.38 | 2.42 | 2.25 | 1.85 | 1.42 | 1.36 | 1.05 | 0.78 | 0.62 | 0.57 | 0.49 | 0.44 | 0.38 | 0.35 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, L.; Jiang, D.; Dai, J. Numerical Modelling and Dynamic Response Analysis of Curved Floating Bridges with a Small Rise-Span Ratio. J. Mar. Sci. Eng. 2020, 8, 467. https://doi.org/10.3390/jmse8060467
Wan L, Jiang D, Dai J. Numerical Modelling and Dynamic Response Analysis of Curved Floating Bridges with a Small Rise-Span Ratio. Journal of Marine Science and Engineering. 2020; 8(6):467. https://doi.org/10.3390/jmse8060467
Chicago/Turabian StyleWan, Ling, Dongqi Jiang, and Jian Dai. 2020. "Numerical Modelling and Dynamic Response Analysis of Curved Floating Bridges with a Small Rise-Span Ratio" Journal of Marine Science and Engineering 8, no. 6: 467. https://doi.org/10.3390/jmse8060467