There are several model parameters in the cylinder pressure analytic model to be calibrated as following:
4.2.1. Calibration of Poyltropic Index
The polytropic process can be expressed as
and it can be transformed to
by taking the logarithm of each side. Consequently, by setting
and
as the horizontal and vertical coordinate, respectively, a straight line can be obtained with the negative of its slope equal to the polytropic index [
17].
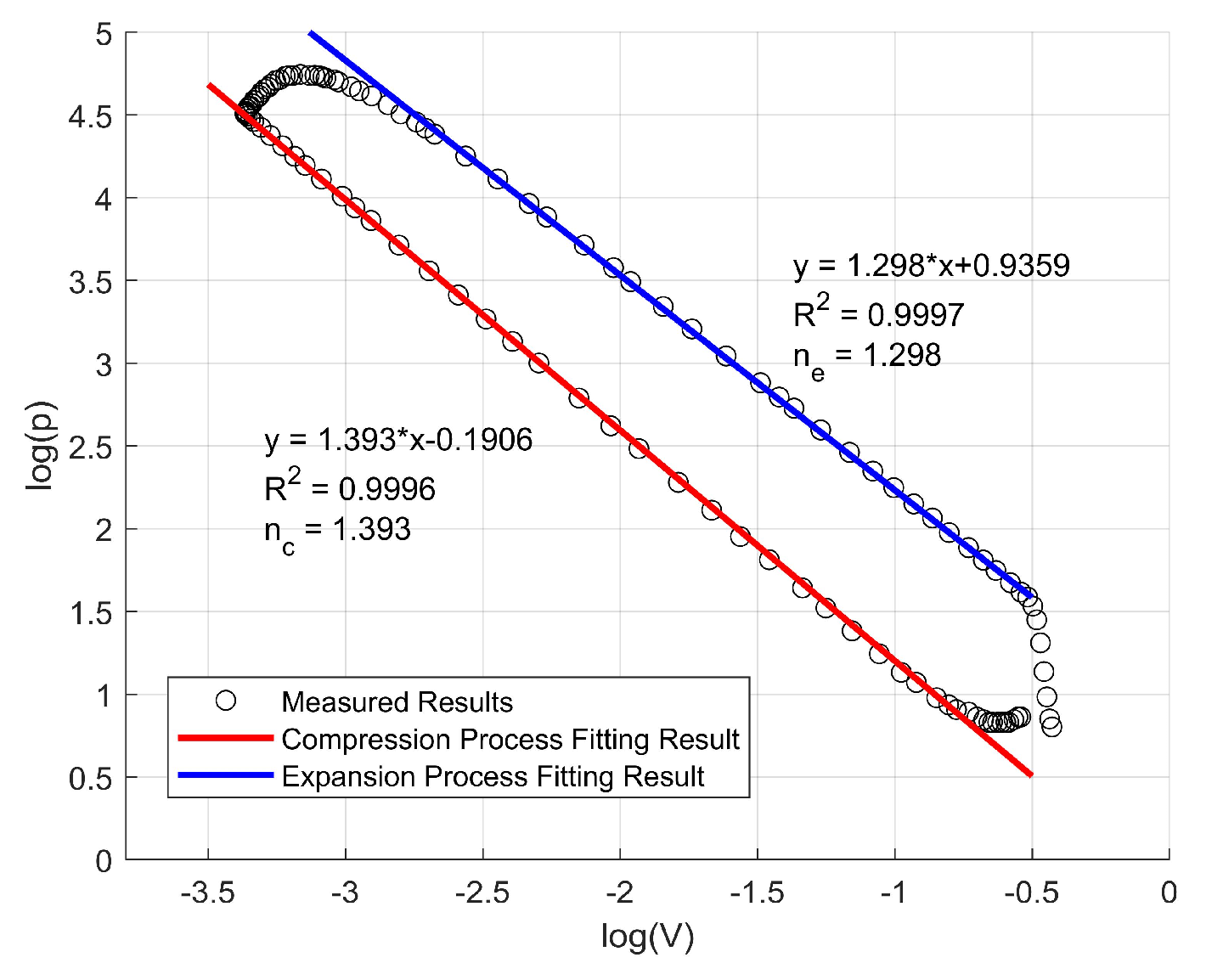
Figure 15 presents the estimation result of
and
for a certain operating condition. As can be observed from this figure, strong linear relationship exists between
and
with
R2 larger than 0.999 for both the compression and expansion phase, which verifies the rationality of the assumption that the actual compression and expansion process can be approximately by the polytropic process.
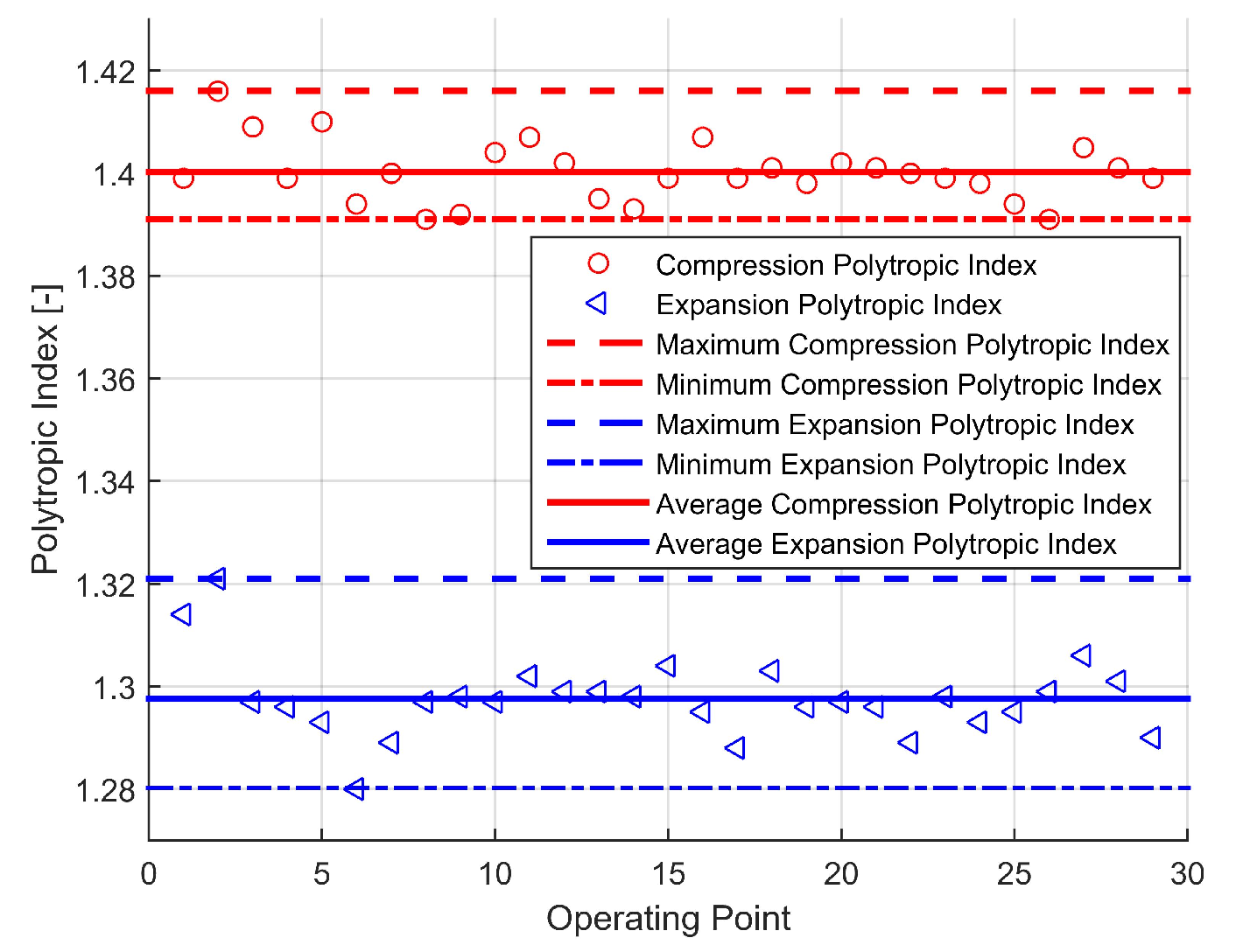
Figure 16 provides the compression and expansion polytropic index estimation results for 29 known engine operating points. These operating points are measured on-board a ship and cover a wide range of operating conditions, which are named as A1 to A29 in this paper. For
, its maximum and minimum value is 1.416 and 1.391, respectively, with a standard deviation of 0.0058; for
, its maximum and minimum value is 1.321 and 1.280, respectively, with a standard deviation of 0.0076. The results indicate that the polytropic index will not change significantly with the engine operating conditions. Actually, it was revealed by Brunt and Platts that the polytropic index was influenced by many factors including engine speed, working medium temperature, heat transfer, etc. [
18]. However, due to lacking of experimental conditions especially for the marine large scale diesel engine investigated in this paper, it is difficult to derive correlations between the polytropic index and other engine performance parameters. Therefore, in this paper a 2-D look-up table is established to calculate the polytropic index with the engine speed and brake power as the input variables.
4.2.2. Calibration of and
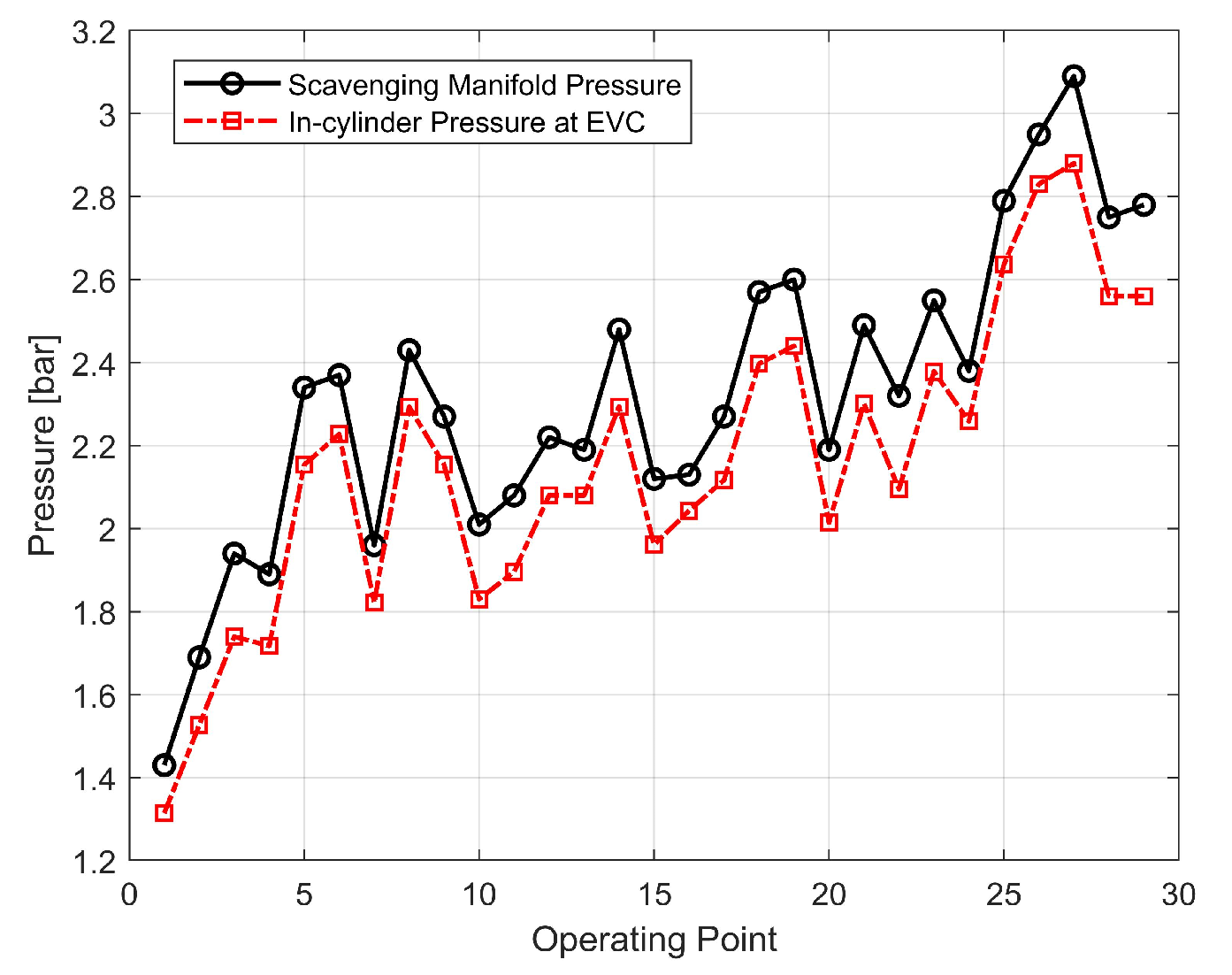
In
Figure 17, the measured value of
and
for the 29 known engine operating points are presented and compared. It can be observed from this figure that
is always greater than
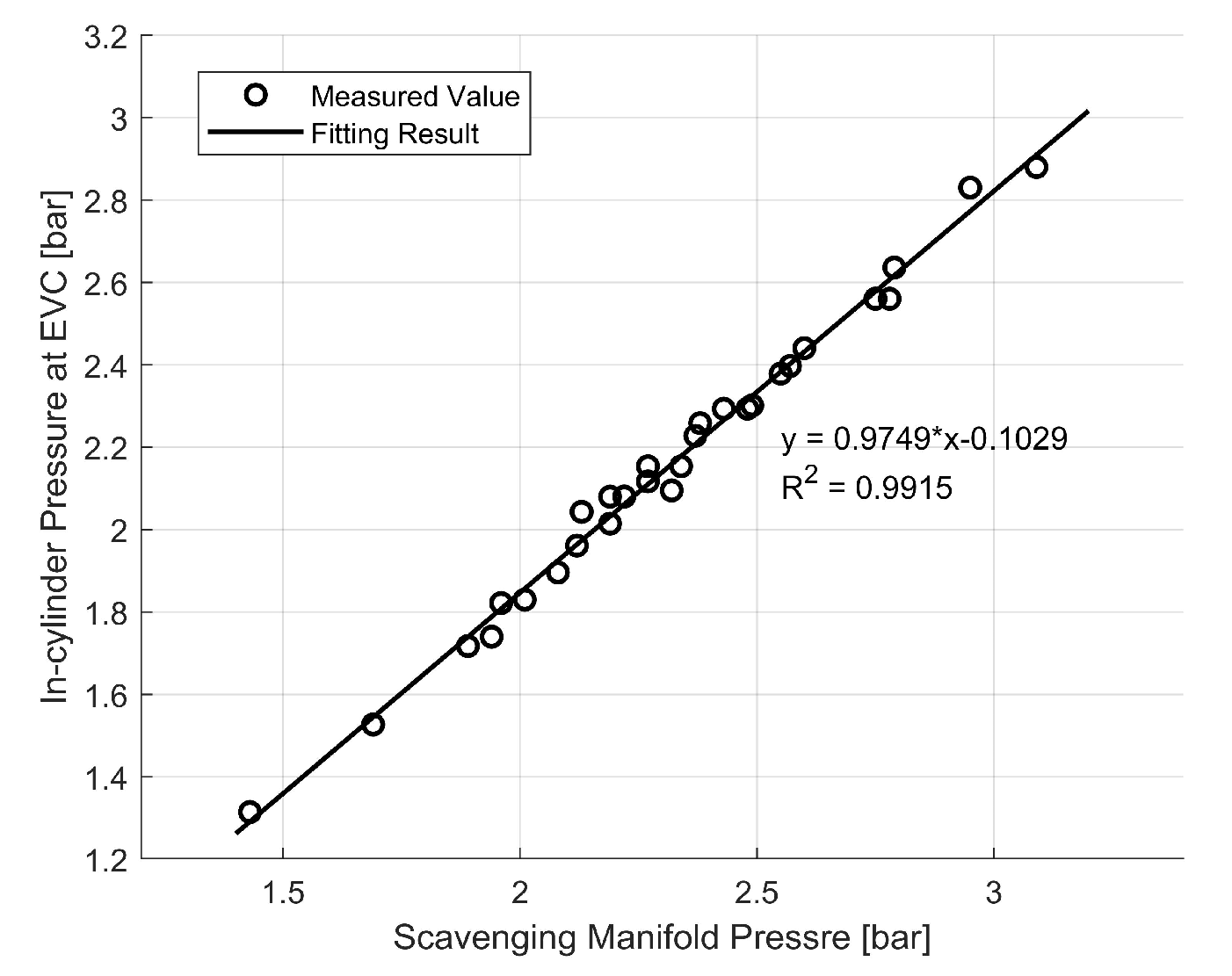
. In order to evaluate the quantitative relationship between
and
, they are set as the horizontal and vertical coordinate, respectively, as shown in
Figure 18. It can be found from this figure that strong linear relationship exists between them with a
R2 greater than 0.99. Consequently,
can be expressed as a linear function of
, that is
in this paper.
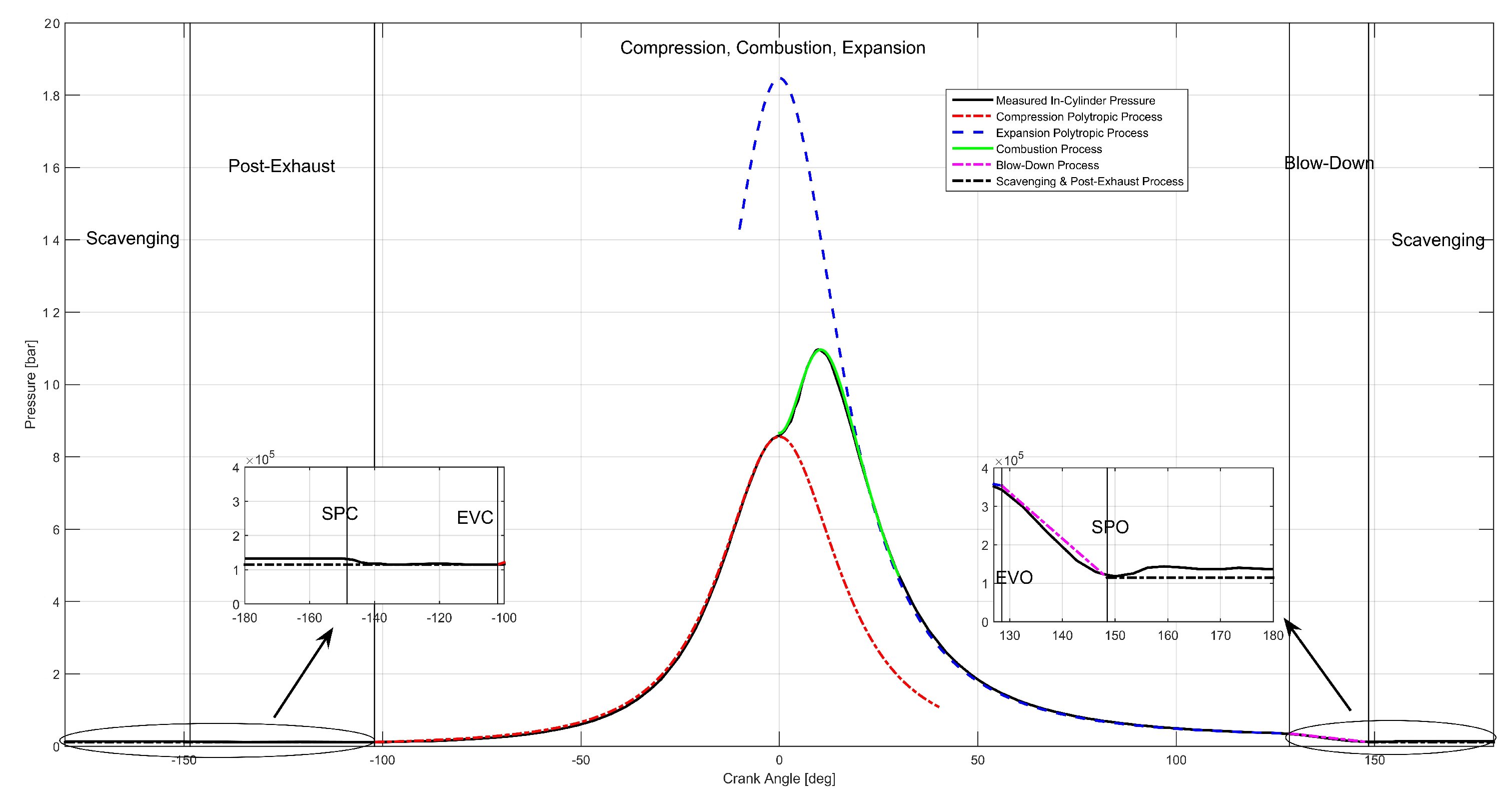
To guarantee the continuity of the simulated in-cylinder pressure trace during the scavenging and post-exhaust phase and also to reduce the model complexity, it is assumed that the in-cylinder pressure during the scavenging and post-exhaust phase is equal to
. Although it can be observed from
Figure 14 that this assumption will make the predicted in-cylinder pressure during the two phases slightly lower than the measured pressure, this will not significantly influence the model’s predictive accuracy because the pressure during the two phases is only about 0.5% of the in-cylinder maximum pressure. Based on this assumption, the slope and intercept of Equation (32) can be determined.
The research carried out by Tang et al [
5] and Kharroubi and Söğüt [
19] all indicated that relationship exists between the scavenging air temperature
and
. As
is not measured both during the engine shop trial and on-board the ship, a 0-D engine model is adopted to investigate the relationship between
and
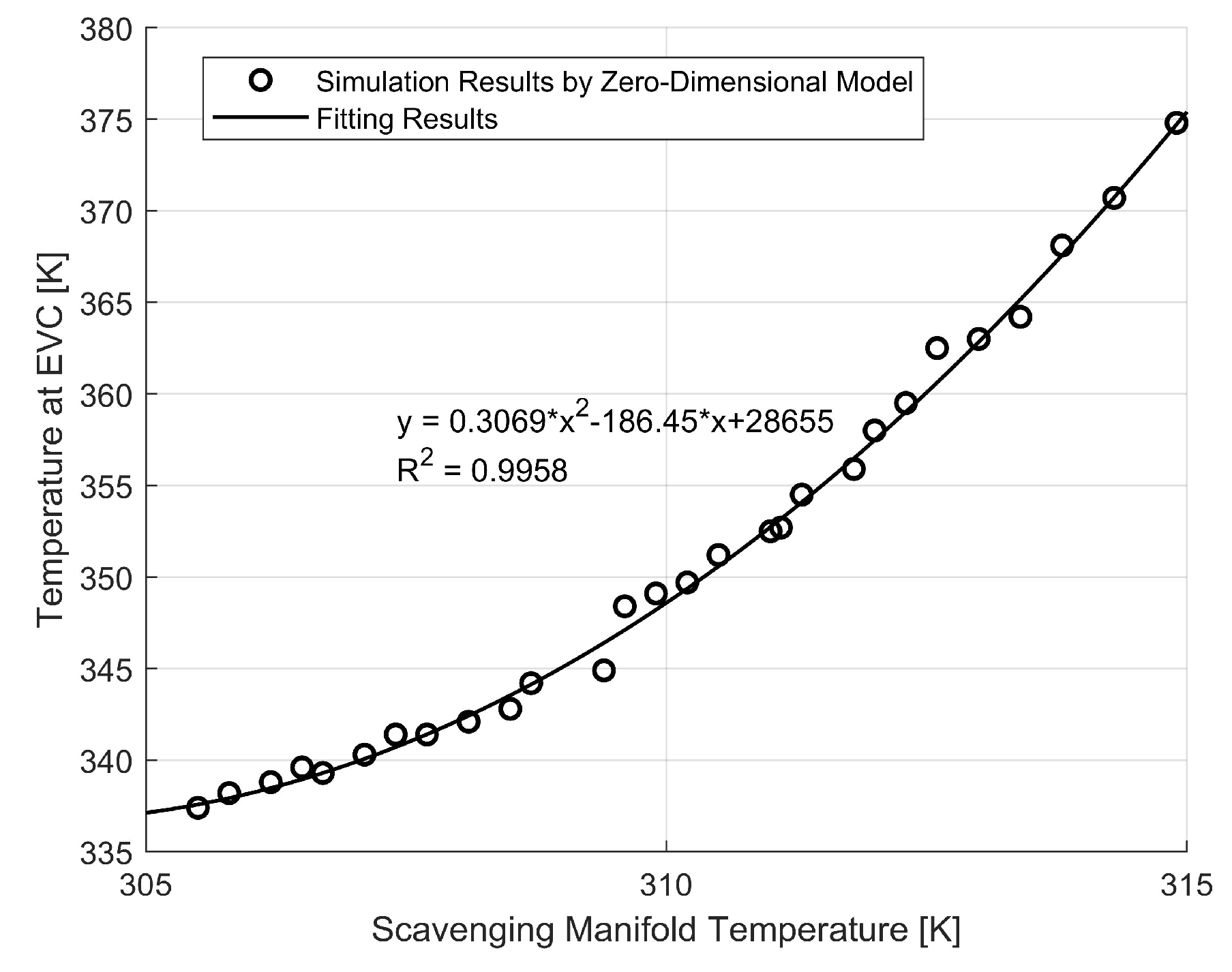
in this paper. In
Figure 19, the simulated results of
and
are set as the horizontal and vertical coordinate. It can be found from this figure that a second-order polynomial is sufficient to capture the changing trend of
with
with a
R2 of 0.9958, indicating satisfactory fitting results.
4.2.3. Calibration of Wiebe Function Model Parameters
In order to predict the in-cylinder pressure trace during the combustion phase, the Wiebe function is used to interpolate between the compression and expansion pressure. The general form of the single Wiebe function can be written as:
where
is the mass fraction burned (MFB);
is the start of combustion crank angle;
is the combustion duration;
a is the efficiency factor;
m is the form factor.
Step 1: Derive the MFB based on the measured in-cylinder pressure trace
Several classical MFB estimation methods can be found in the literature, such as the Apparent Heat Release model, the Gatowski model, the RW model, as well as the pressure ratio management (PRM) model [
20]. In this paper, the PRM model is adopted to derive the MFB:
where
PR is referred to as the pressure ratio;
is the measured in-cylinder pressure;
is the motored in-cylinder pressure;
is the maximum value of
PR, which is used to normalize
PR to obtain the MFB.
In this paper, the motored in-cylinder pressure
is estimated by assuming the motored process as a polytropic process as it was done by many researchers [
21,
22,
23]. In addition, it is assumed that the expansion polytropic index is equal to that of the compression process, the value of which can be estimated by following the calibration procedure as described in
Section 4.2.1. Consequently,
can be determined by using the following equation:
where
and
are the pressure and volume at the reference point, which can be an arbitrary crank angle position between the EVC and SOC.
Step 2: Determine the number of single Wiebe function needed to be superposed
Ghojel pointed out that the form factor
m in Wiebe function can reflect the distribution of combustion process, thus, the variation of
m can be exploited to determine the number of single Wiebe function to be superposed [
24]. Following this idea, the original single Wiebe function as shown in Equation (33) can be transformed to the following form by appropriate mathematical manipulation:
where
is the crank angle corresponding to 50% MFB.
Set the and as the horizontal and vertical coordinate, respectively. If a straight line is obtained, a single Wiebe function is sufficient to simulate the combustion process accurately, otherwise, two or more single Wiebe functions are needed, the number of which can be estimated by the number of broken lines in the plane of ~. For the 7S80ME-C9.2 marine engine, it is found that superposing two single Wiebe functions is sufficient in the whole engine operating envelope.
Step 3: Estimate the Wiebe function model parameters by using LSM
As mentioned in Step 2, double Wiebe function is sufficient to simulate the actual combustion process, which can be written as:
where subscript
p and
d represents premixed and diffusive combustion, respectively;
is the fraction of fuel burned during the diffusive combustion phase.
There are totally 9 model parameters in the double Wiebe function as shown in equation (38), making the model calibration process relatively laborious. Therefore, to reduce the number of Wiebe function model parameters to be calibrated, two assumptions are made herein:
(1) The premixed combustion duration is assumed to be equal to that of diffusive combustion. In addition, the crank angle range between 1% and 99% MFB is defined as the combustion duration by taking into account that the Signal to Noise Ratio (SNR) is relatively lower and the combustion is unstable at the start and end of the combustion;
(2) The crank angle at the start of premixed combustion is also assumed to be equal to that of diffusive combustion.
Based on the two assumptions, the number of Wiebe function model parameters to be calibrated reduces from 9 to 7; in addition, and can be estimated from the MFB curve beforehand. As a result, only 5 Wiebe function model parameters remain to be estimated.
Table 4 presents the calibration results of the Wiebe function model parameters for four operating points as well as the relevant predictive errors in MFB. As can be observed from this table,
PE is less than 1.07 %, whereas
MAE is less than 0.31 %, indicating the sufficient accuracy of double Wiebe function in simulating the actual combustion process in CI engines as well as the satisfactory calibration results.
To obtain an overall accurate Wiebe function, a 2-D look-up table is established for the Wiebe function model parameters with the engine speed and brake power as the inputs. In addition, it is found that the combustion duration can be well approximated by a linear function of the fuel injection rate.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}