Bubble Sweep-Down of Research Vessels Based on the Coupled Eulerian-Lagrangian Method


Abstract
:1. Introduction
2. Numerical Method
2.1. Governing Equations
2.2. Turbulence Model and Coupled Eulerian-Lagrangian Method
2.3. Numerical Scheme in CFD
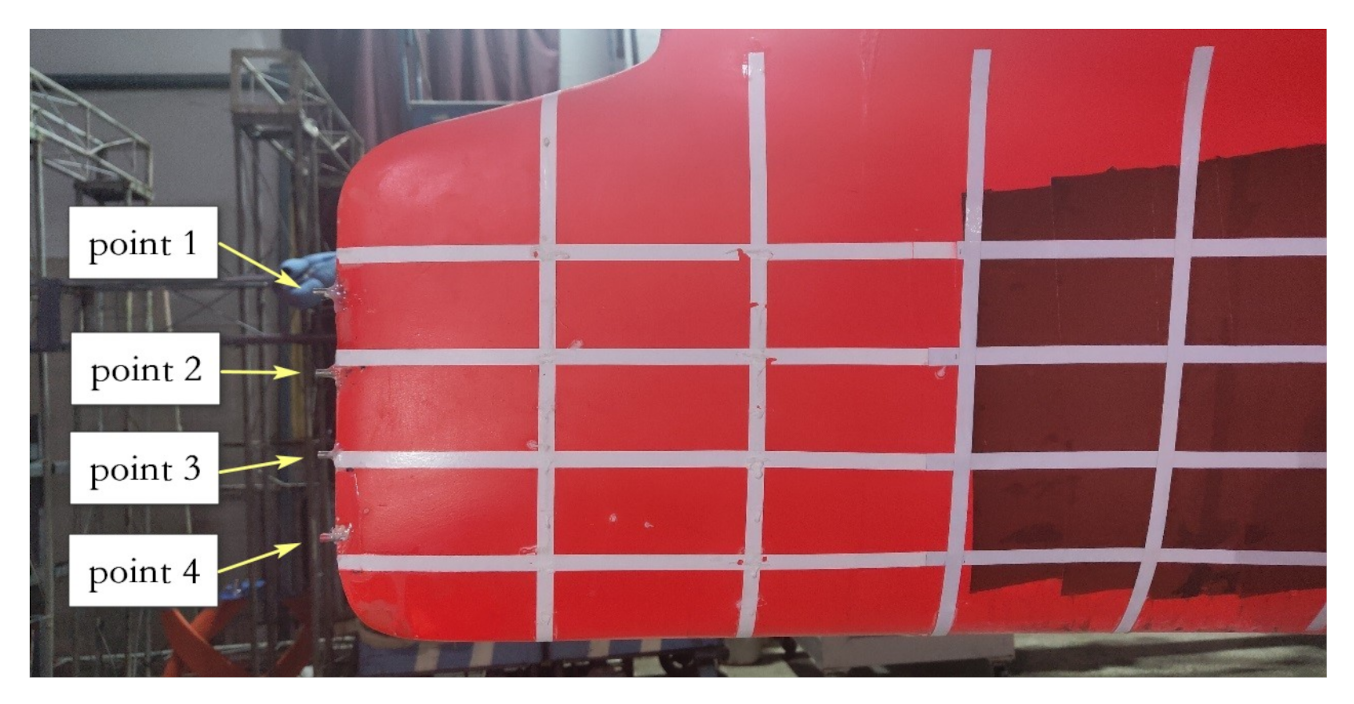
3. Experimental Method
4. Results and Analysis
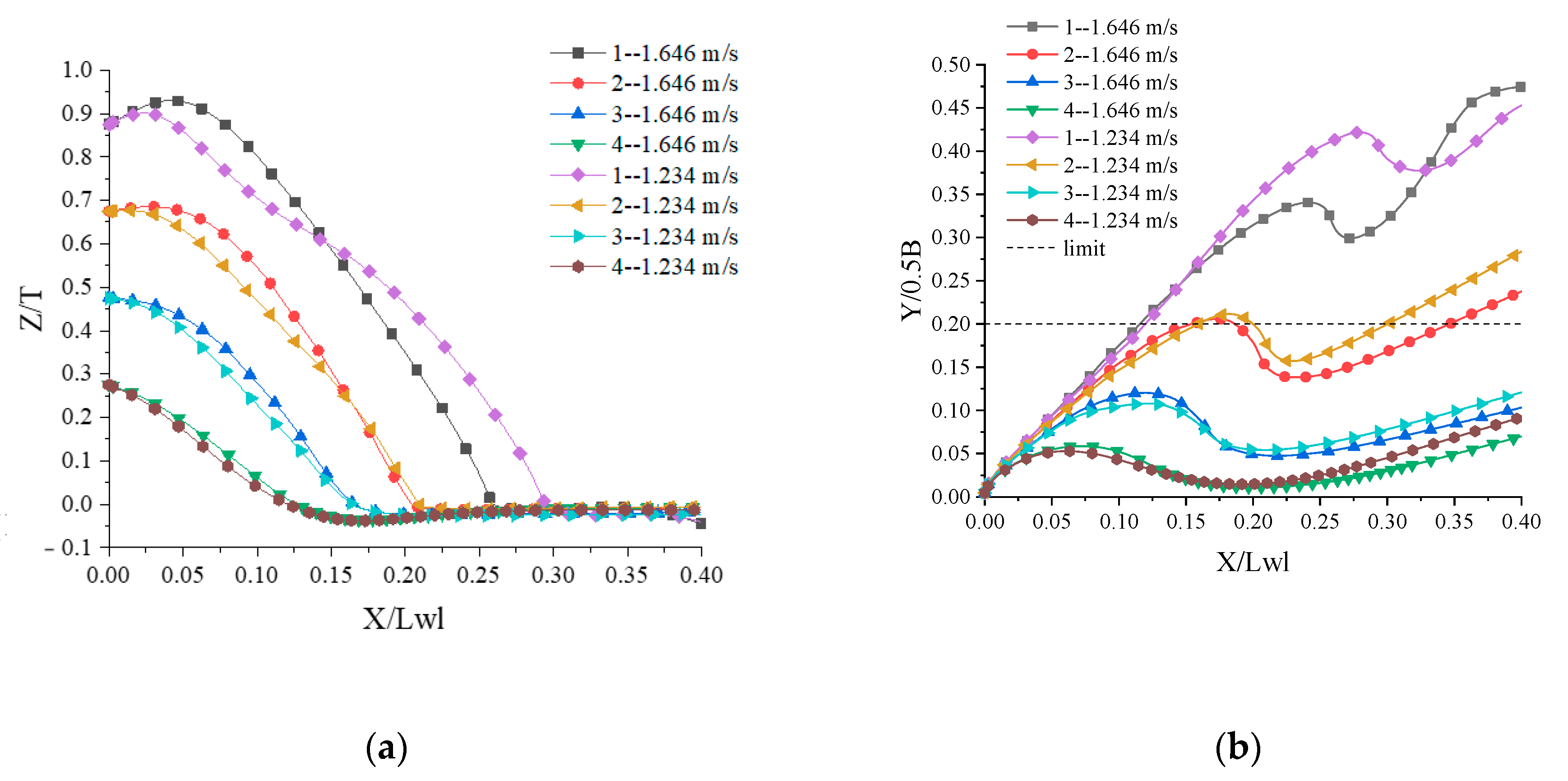
4.1. Spatial Movement Characteristics of Bubbles Under Sweeping
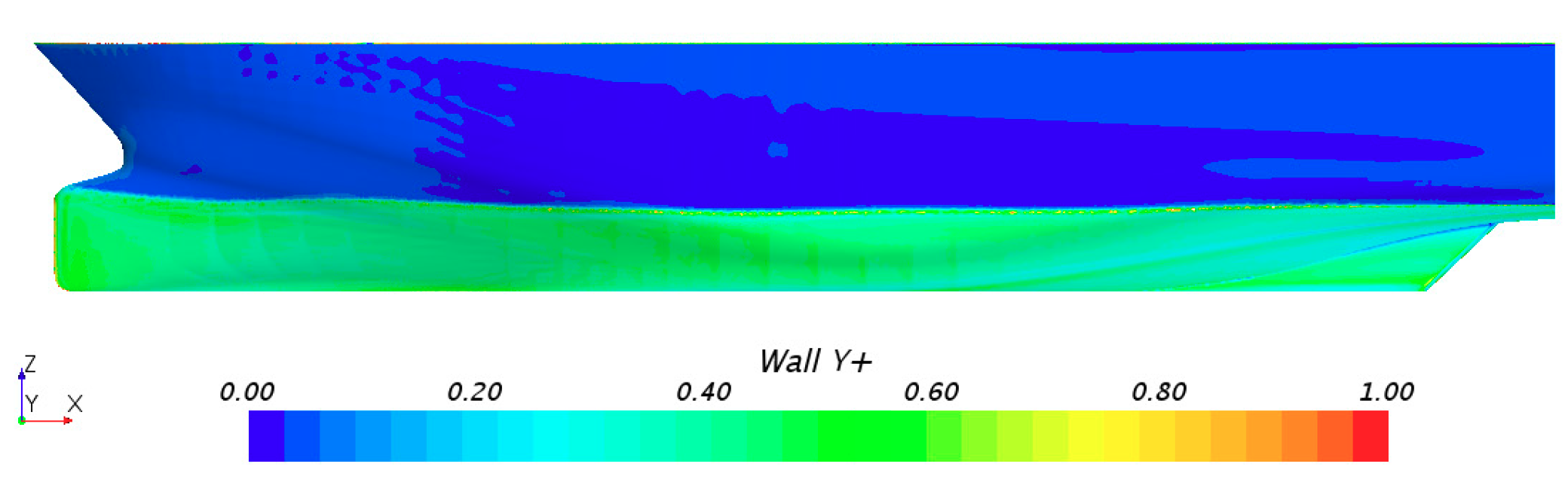
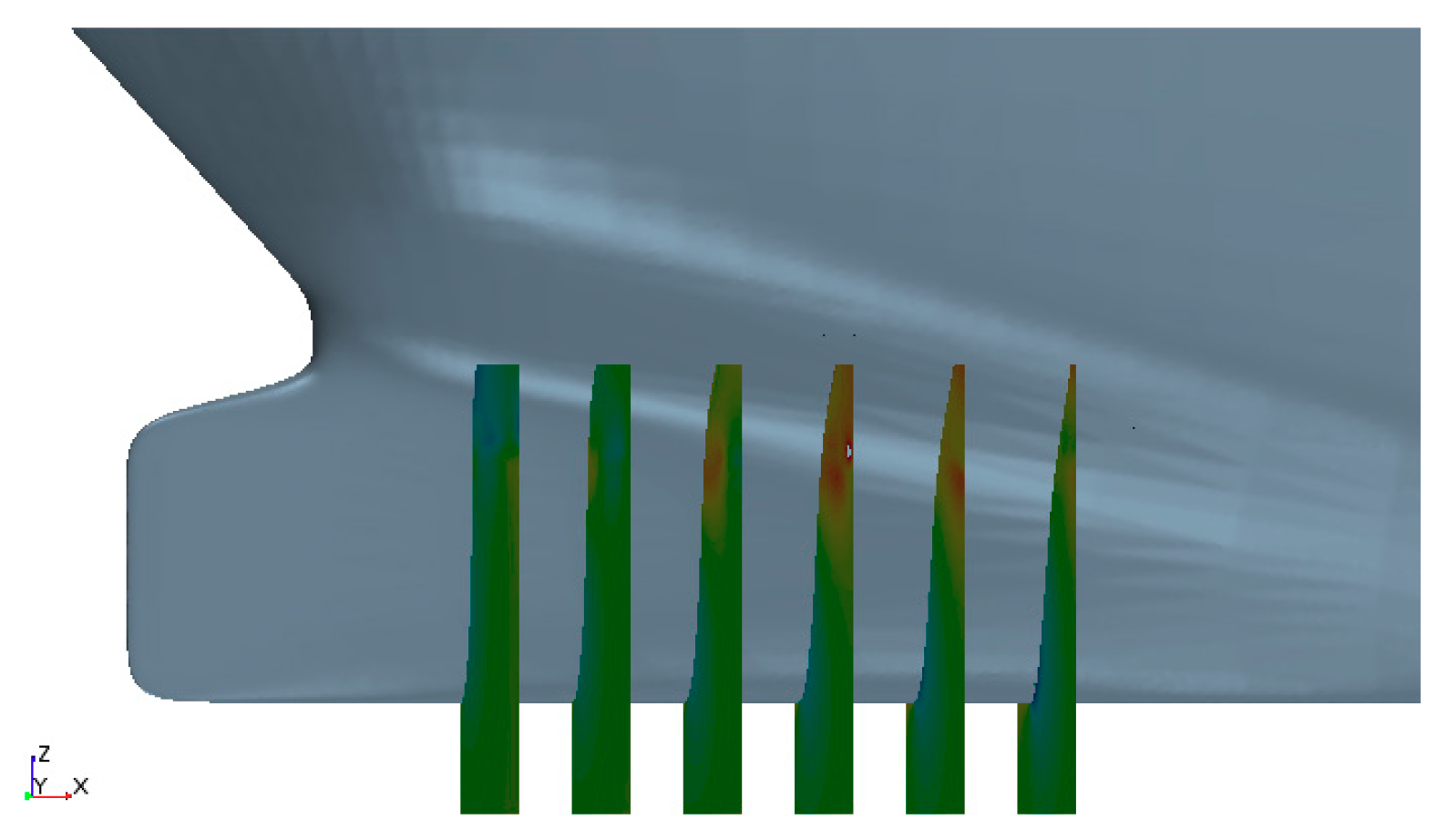
4.2. Flow Around the Bow
4.3. Shroud
5. Conclusions
- 1)
- It is feasible to use the Eulerian-Lagrangian method to calculate the bubble sweep-down phenomenon.
- 2)
- The phenomenon of bubble sweep-down is related to the shape of the bow of the ship and the distribution of the pressure field. The pressure difference caused by the decrease in the hull surface pressure with the increase in water depth and the vertical downward velocity component near the wall forces the bubbles to sweep down.
- 3)
- The movement characteristics of the bubble sweep-down space are related to the initial position and speed of the bubble. When the bow is closer to the bottom of the ship, the sweeping position of the bubble is closer to the bow, and the position after the bottom of the ship is closer to the center line of the bottom of the ship. Therefore, the influence on the position of the stern sonar is greater, and the degree of this influence increases with the increase in speed.
- 4)
- After the bubble moves through the sweep-down point, it moves to the center line of the bottom of the ship to strengthen the influence on the sonar position. From the perspective of hydrodynamics, the installation of the diversion cover plays the role of physical shielding and strengthens the guidance of the lateral vortex system, so that the bubbles move to the side of the ship with the vortex to achieve the purpose of defoaming.
- 5)
- The installation of the shroud produces a certain increase in resistance while achieving a certain defoaming effect, which is especially obvious at low speeds but is already extremely small at working speeds. This occurs because viscous resistance dominates at lower speeds, whereas pressure resistance is more important at higher speeds.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Karafiath, G.; Hotaling, J.M.; Meehan, J.M. Fisheries Research Vessel hydrodynamic design minimizing bubble sweep-down. In Proceedings of the Oceans 2001 MTS/IEEE Conference and Exhibition, Washington, DC, USA, 5–8 November 2001; Volume 2, pp. 1212–1223. [Google Scholar]
- Deane, G.B.; Stokes, M.D. Scale dependence of bubble creation mechanisms in breaking waves. Nat. Cell Biol. 2002, 418, 839–844. [Google Scholar] [CrossRef] [PubMed]
- Thorpe, S.A. The Turbulent Ocean; Cambridge University Press: Cambridge, UK, 2005; pp. 240–243. [Google Scholar]
- Sebastian, S.M.; Caruthers, J.W. Effects of naturally occurring bubbles on multibeam sonar operations. In Proceedings of the Oceans 2001 MTS/IEEE Conference and Exhibition, Washington, DC, USA, 5–8 November 2001; Volume 2, pp. 1241–1247. [Google Scholar]
- Rolland, D.; Clark, P. Reducing bubble sweep-down effects on research vessels. In Proceedings of the Oceans 2001 MTS/IEEE Conference and Exhibition, Washington, DC, USA, 5–8 November 2001; pp. 1–7. [Google Scholar]
- Delacroix, S.; Germain, G.; Berger, L.; Billard, J.-Y. Bubble sweep-down occurrence characterization on Research Vessels. Ocean. Eng. 2016, 111, 34–42. [Google Scholar] [CrossRef] [Green Version]
- Mallat, B.; Germain, G.; Billard, J.-Y.; Gaurier, B. A 3D study of the bubble sweep-down phenomenon around a 1/30 scale ship model. Europ. J. Mech. 2018, 72, 471–484. [Google Scholar] [CrossRef] [Green Version]
- Han, S.; Lee, Y.-S.; Choi, Y.B. Hydrodynamic hull form optimization using parametric models. J. Mar. Sci. Technol. 2012, 17, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Palaniappan, M.; Subramanian, V.A. Hydrodynamic design for mitigation of bubble sweep down in sonar mounted research vessels. Int. Shipbuild. Prog. 2017, 64, 101–126. [Google Scholar] [CrossRef]
- Maxwell, R.; Ata, S.; Wanless, E.; Moreno-Atanasio, R. Computer simulations of particle–bubble interactions and particle sliding using Discrete Element Method. J. Colloid Interface Sci. 2012, 381, 1–10. [Google Scholar] [CrossRef]
- Bérard, A.; Patience, G.S.; Blais, B. Experimental methods in chemical engineering: Unresolved CFD-DEM. Can. J. Chem. Eng. 2020, 98, 424–440. [Google Scholar] [CrossRef]
- Li, X.; Chen, G.; Zhu, H. Modelling and assessment of accidental oil release from damaged subsea pipelines. Mar. Pollut. Bull. 2017, 123, 133–141. [Google Scholar] [CrossRef]
- Zhang, X.; Ahmadi, G. Eulerian-Lagrangian simulations of liquid-gas-solid flows in three-phase slurry reactors. Chem. Eng. Sci. 2005, 60, 5089–5104. [Google Scholar] [CrossRef]
- Watson, N.A.; Kelly, M.; Owen, I.; Hodge, S.; White, M. Computational and experimental modelling study of the unsteady airflow over the aircraft carrier HMS Queen Elizabeth. Ocean. Eng. 2019, 172, 562–574. [Google Scholar] [CrossRef]
- Home, D.; Lightstone, M. Numerical investigation of quasi-periodic flow and vortex structure in a twin rectangular subchannel geometry using detached eddy simulation. Nucl. Eng. Des. 2014, 270, 1–20. [Google Scholar] [CrossRef]
- Jee, S.; Shariff, K. Detached-eddy simulation based on the v 2–f model. Int. J. Heat Fluid Flow 2014, 46, 84–101. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Symbol | Real Ship | Model | Unit |
|---|---|---|---|---|
| Waterline length | LWL | 90.2 | 3.608 | m |
| Breadth | B | 16.8 | 0.672 | m |
| Fore draft | TF | 5 | 0.2 | m |
| Aft draft | TA | 5 | 0.2 | m |
| Displaced volume | ▽ | 3844.6 | 0.2461 | m3 |
| Wet surface area | S0 | 1663 | 2.661 | m2 |
| Longitudinal center of buoyancy | LCB | 41.008 | 1.64 | m |
| Block coefficient | CB | 0.5074 | ||
| Scale ratio | λ | 1 | 25 | |
| Grid Scheme | Base Size (M) | Number of Grids (Million) | Simulated Drag Coefficient ×10³ | Test Resistance Coefficient ×10³ |
|---|---|---|---|---|
| 1 | 0.1 | 6.8 | 4.745 | 4.827 |
| 2 | 0.071 | 9.7 | 4.782 | |
| 3 | 0.05 | 11.8 | 4.790 |
| Ctm1 | RG | PG | CG | UG | ||
|---|---|---|---|---|---|---|
| 4.790 | 0.216 | 1.531 | 0.70 | 0.0114 | 0.010 | 0.003 |
| Actual Ship Speed Vs (Kn) | Froude Number Fr | Model Speed Vm (m/s) | Trim Angle (°) | Wave |
|---|---|---|---|---|
| 12 | 0.225 | 1.234 | 0 | Static water |
| 16 | 0.277 | 1.646 | 0 | Static water |
| Item | Symbol | Model | Unit |
|---|---|---|---|
| Displaced volume | ▽ | 0.0002 | m3 |
| Wet surface area | S | 0.0416 | m2 |
| Installed surface area | S | 0.0295 | m2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Cai, G.; Pang, Y.; Guo, C.; Han, Y.; Zhou, G. Bubble Sweep-Down of Research Vessels Based on the Coupled Eulerian-Lagrangian Method. J. Mar. Sci. Eng. 2020, 8, 1040. https://doi.org/10.3390/jmse8121040
Wang W, Cai G, Pang Y, Guo C, Han Y, Zhou G. Bubble Sweep-Down of Research Vessels Based on the Coupled Eulerian-Lagrangian Method. Journal of Marine Science and Engineering. 2020; 8(12):1040. https://doi.org/10.3390/jmse8121040
Chicago/Turabian StyleWang, Wei, Guobin Cai, Yongjie Pang, Chunyu Guo, Yang Han, and Guangli Zhou. 2020. "Bubble Sweep-Down of Research Vessels Based on the Coupled Eulerian-Lagrangian Method" Journal of Marine Science and Engineering 8, no. 12: 1040. https://doi.org/10.3390/jmse8121040