Combining Numerical Simulations and Normalized Scalar Product Strategy: A New Tool for Predicting Beach Inundation



Abstract
:1. Introduction
2. Materials and Methods
2.1. The hydrodynamic Solver
2.2. The NSP Method
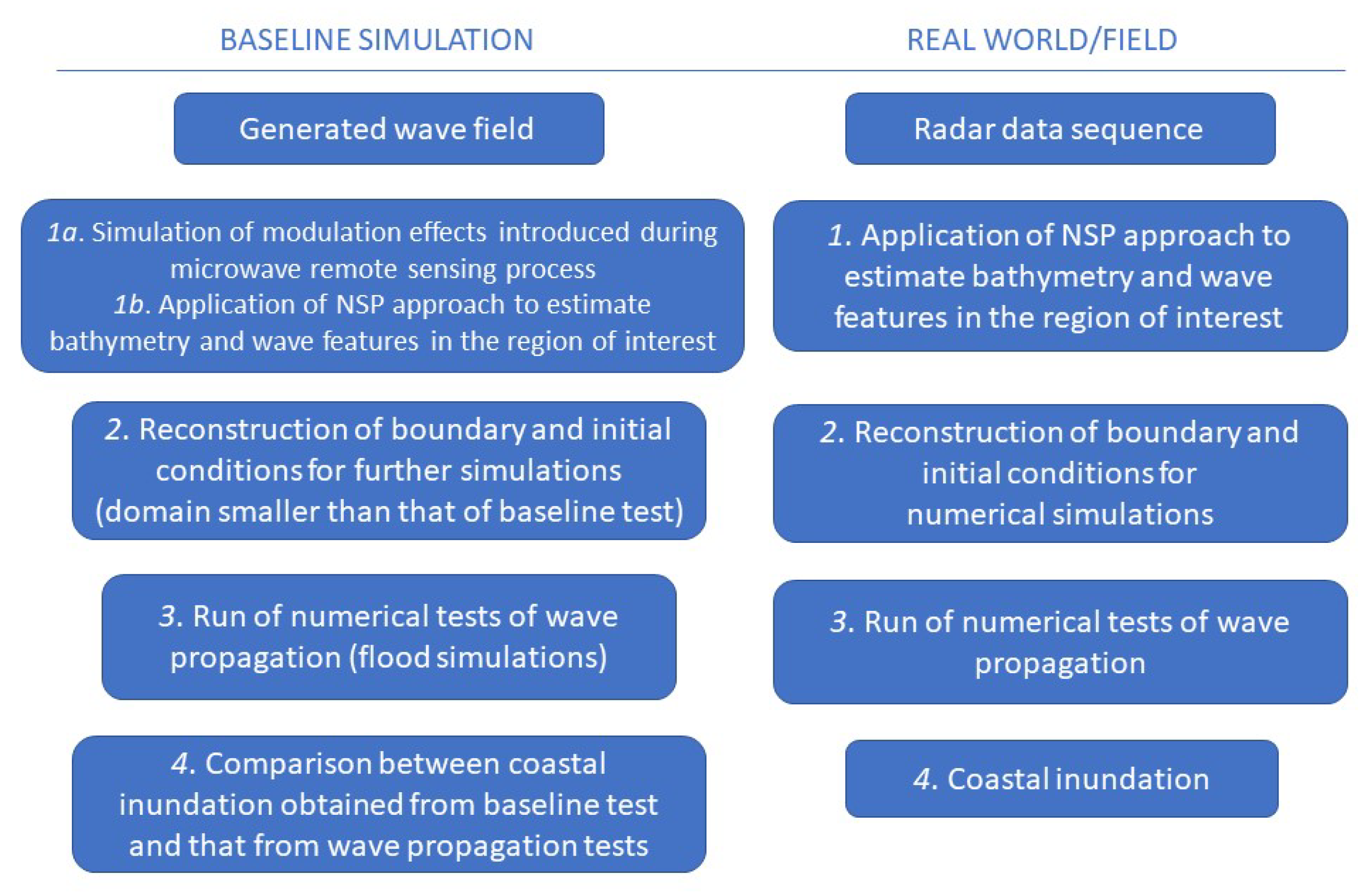
2.3. The Methodology
- The zero-th step is the wave field to be investigated in a specific region of interest: while this exists in the real world, it is here simulated to provide realistic conditions (baseline simulations), similarly to [31].
- The first step is the reconstruction of both wave field and bathymetry in an offshore portion of the domain (order of kilometers from the coast, where typically radar sequence data are collected) using the NSP approach.
- The estimated bathymetry and wave characteristics (significant wave height , peak period , direction ) are used to build, respectively, the seabed morphology and the boundary conditions (in terms of JONSWAP spectra) at different depths/locations.
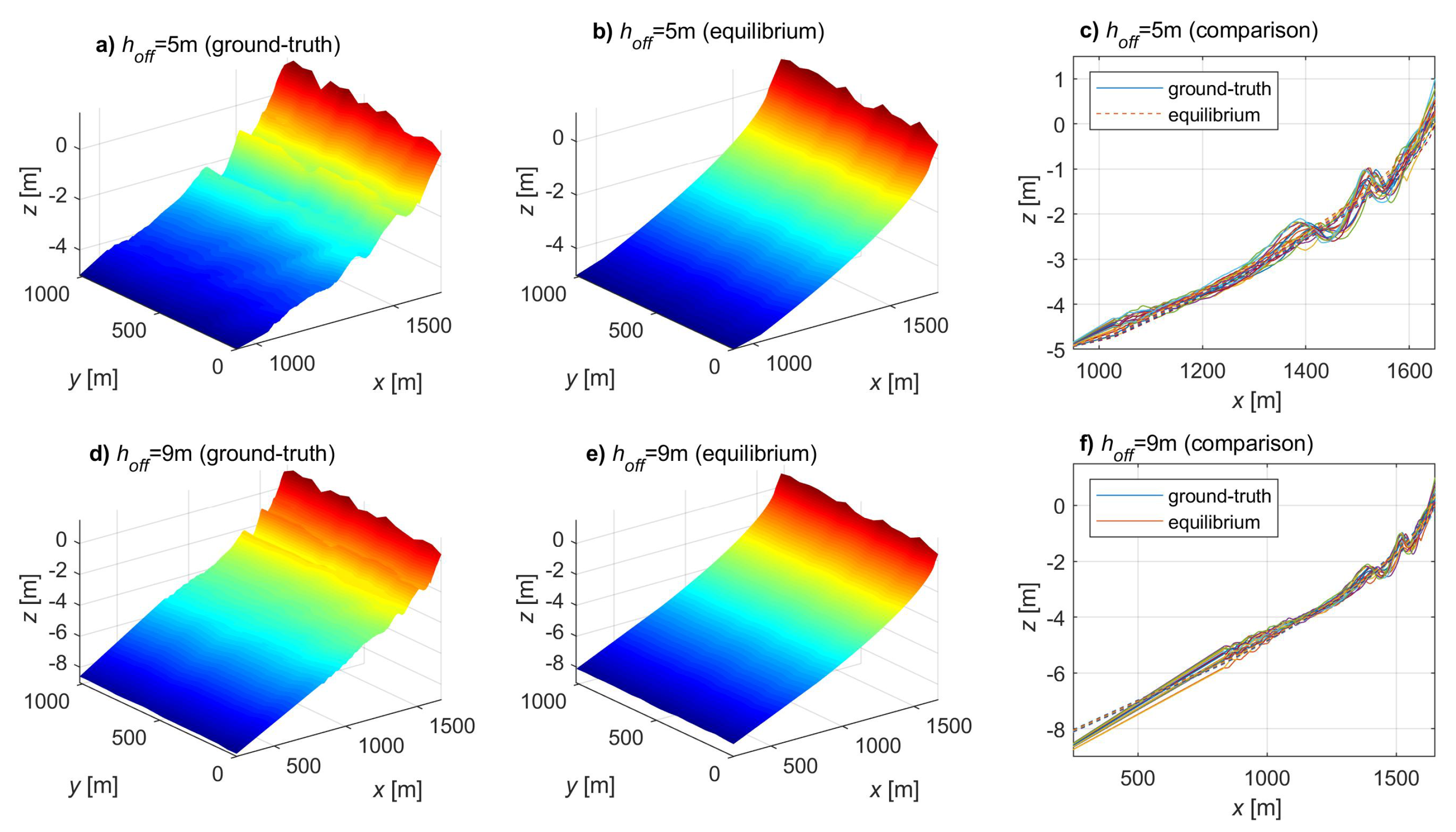
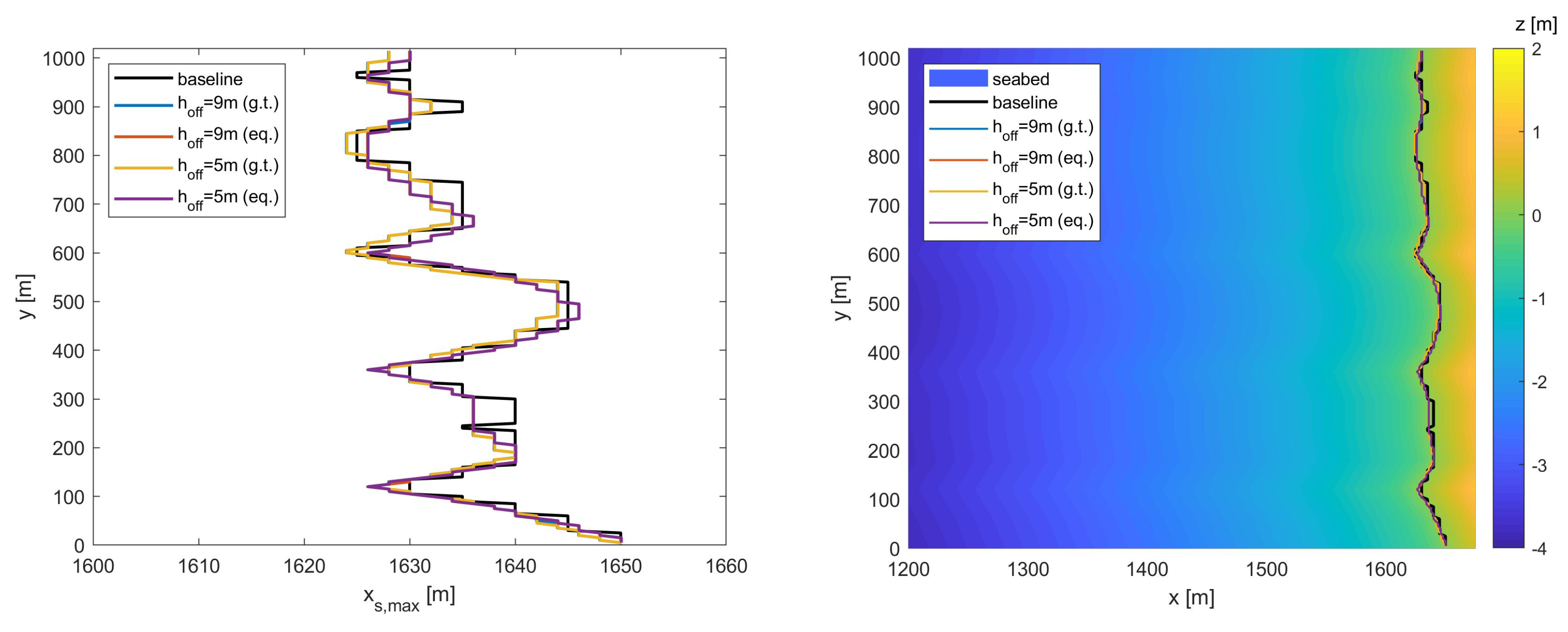
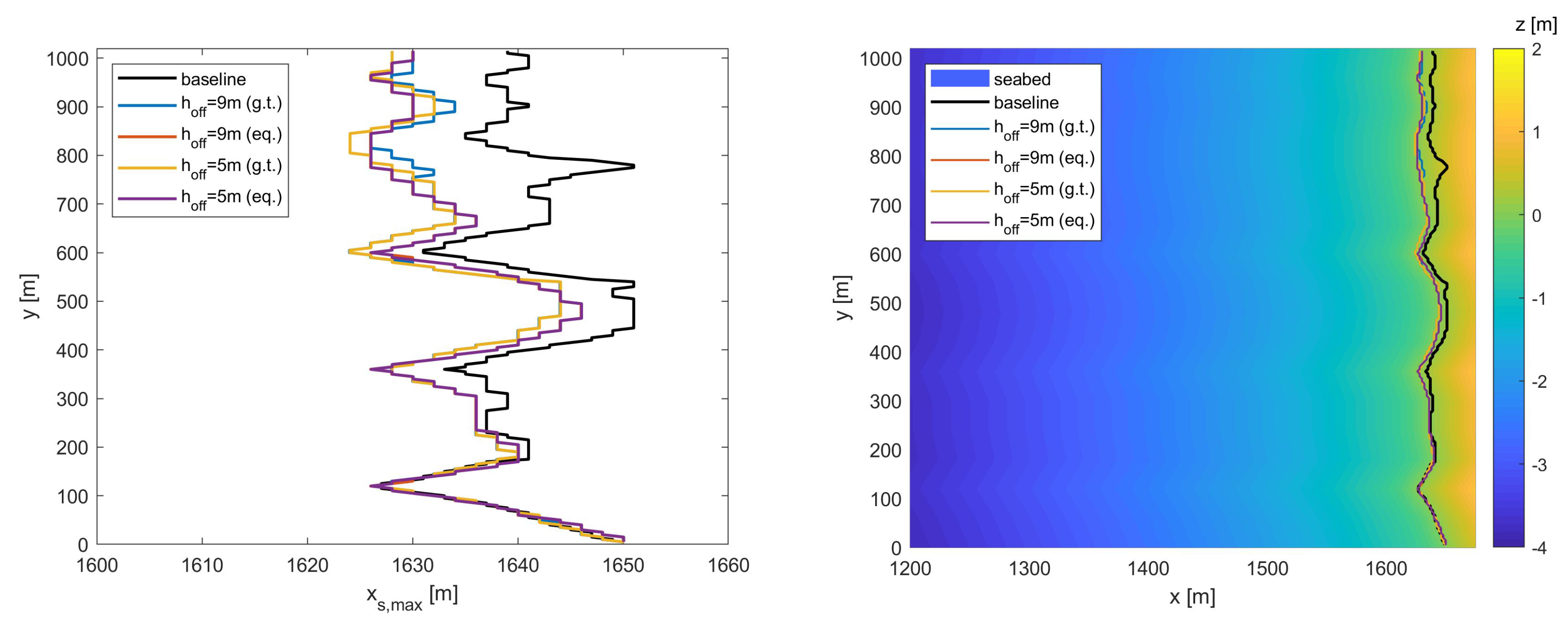
- Flood simulations are run using boundary conditions at depths of either m or m, and using either ground-truth bathymetries or equilibrium-profile bathymetries. While the use of a ground-truth bathymetry represents the case of beach surveys available for the region of interest, the equilibrium profiles may be applied when surveys are not available, as such an approach has already been observed to provide an accurate description of coastal dynamics [48,49].
- The beach inundation obtained from each baseline simulation is compared to the results of the corresponding flood simulations.
2.4. The Application
The Numerical Simulations
3. Results
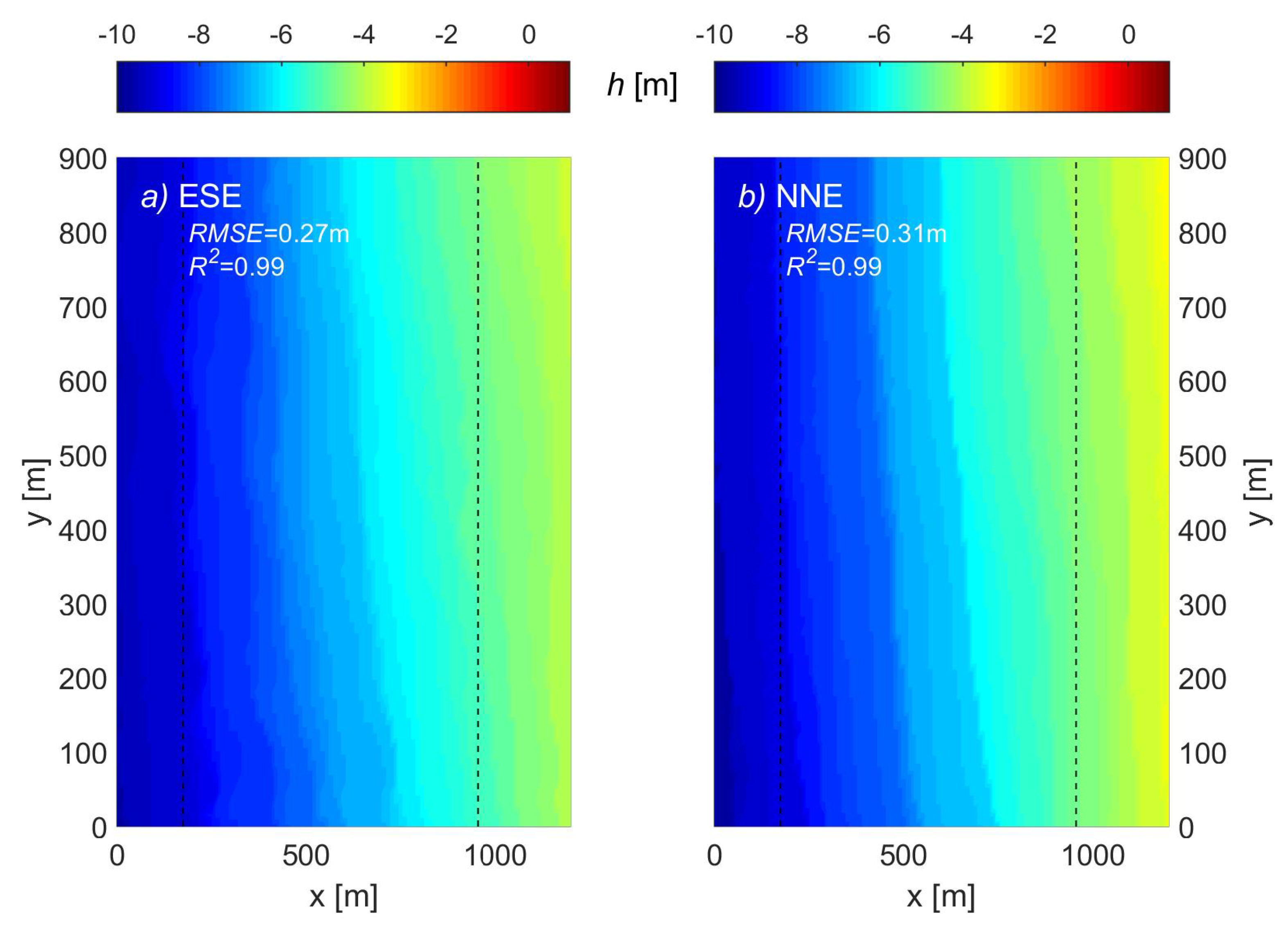
3.1. Step 1: NSP Reconstruction
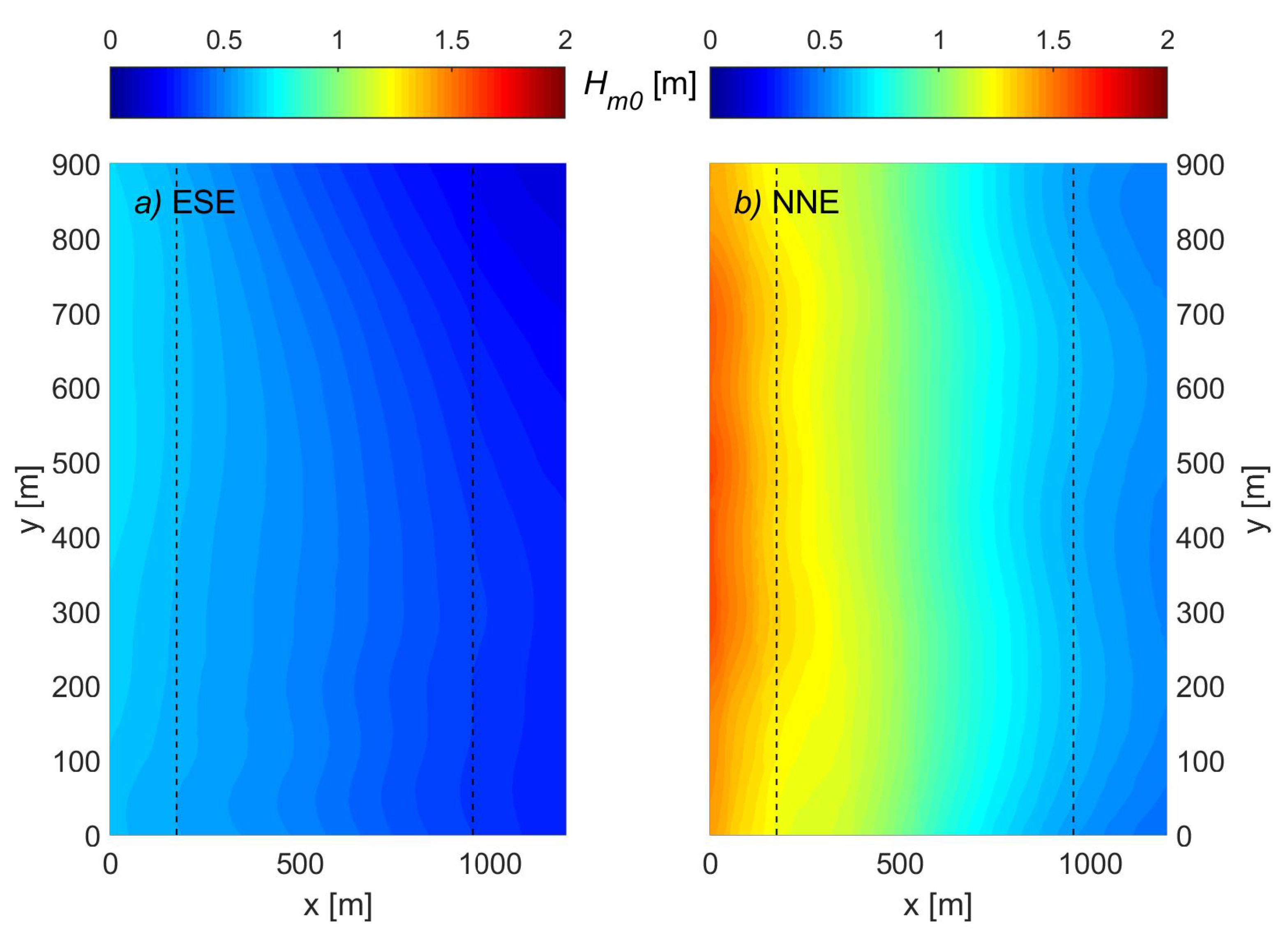
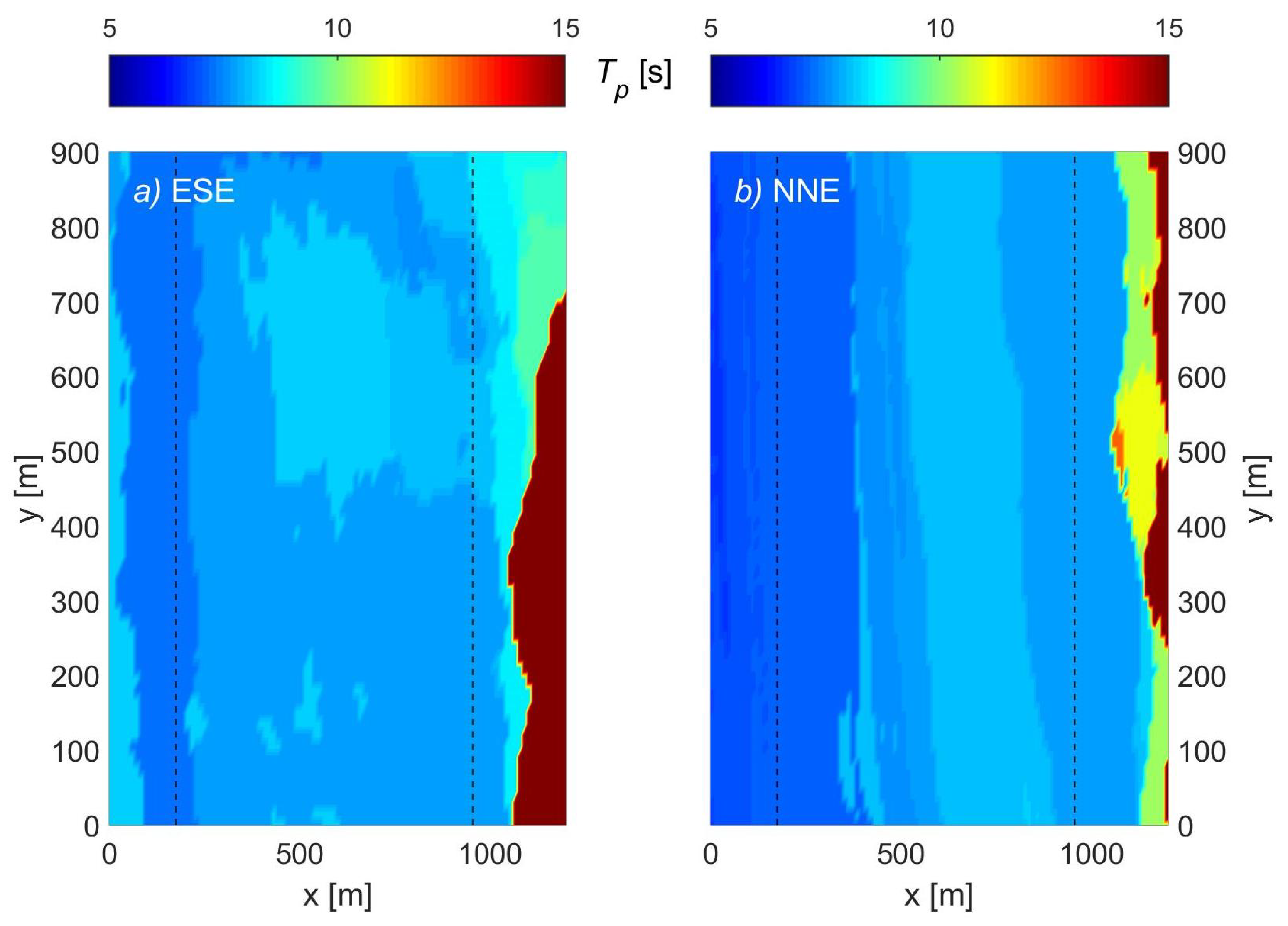
3.2. Step 2: Boundary and Initial Conditions
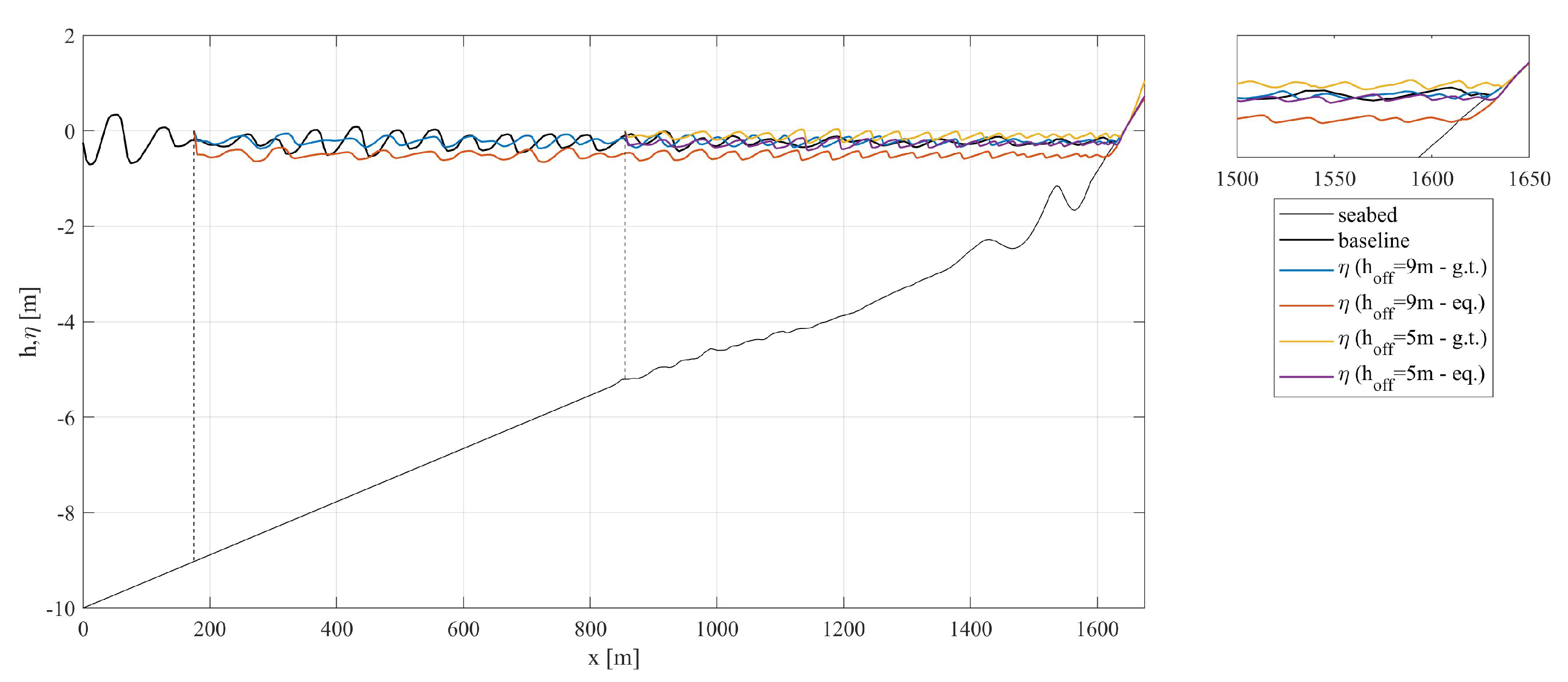
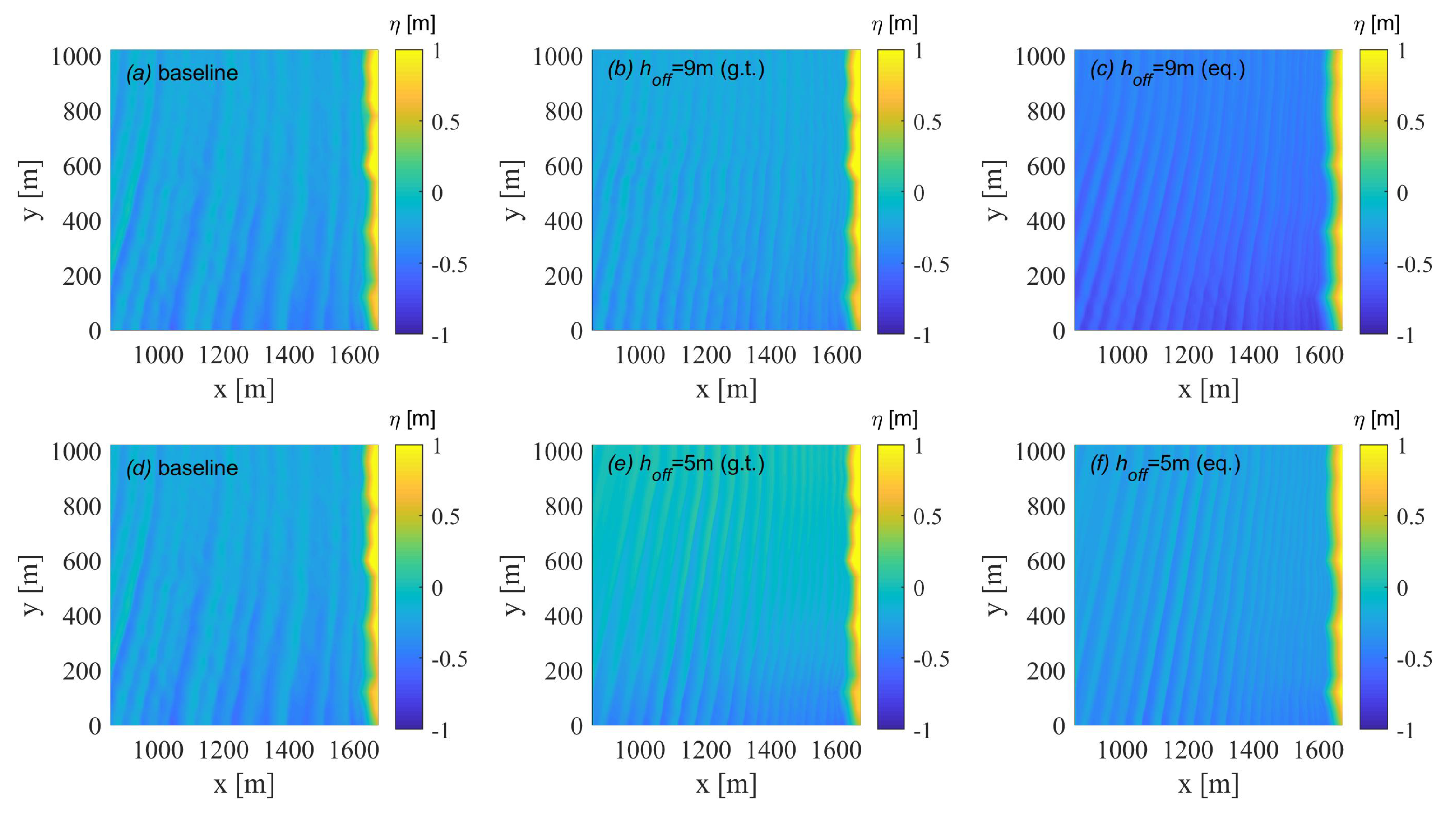
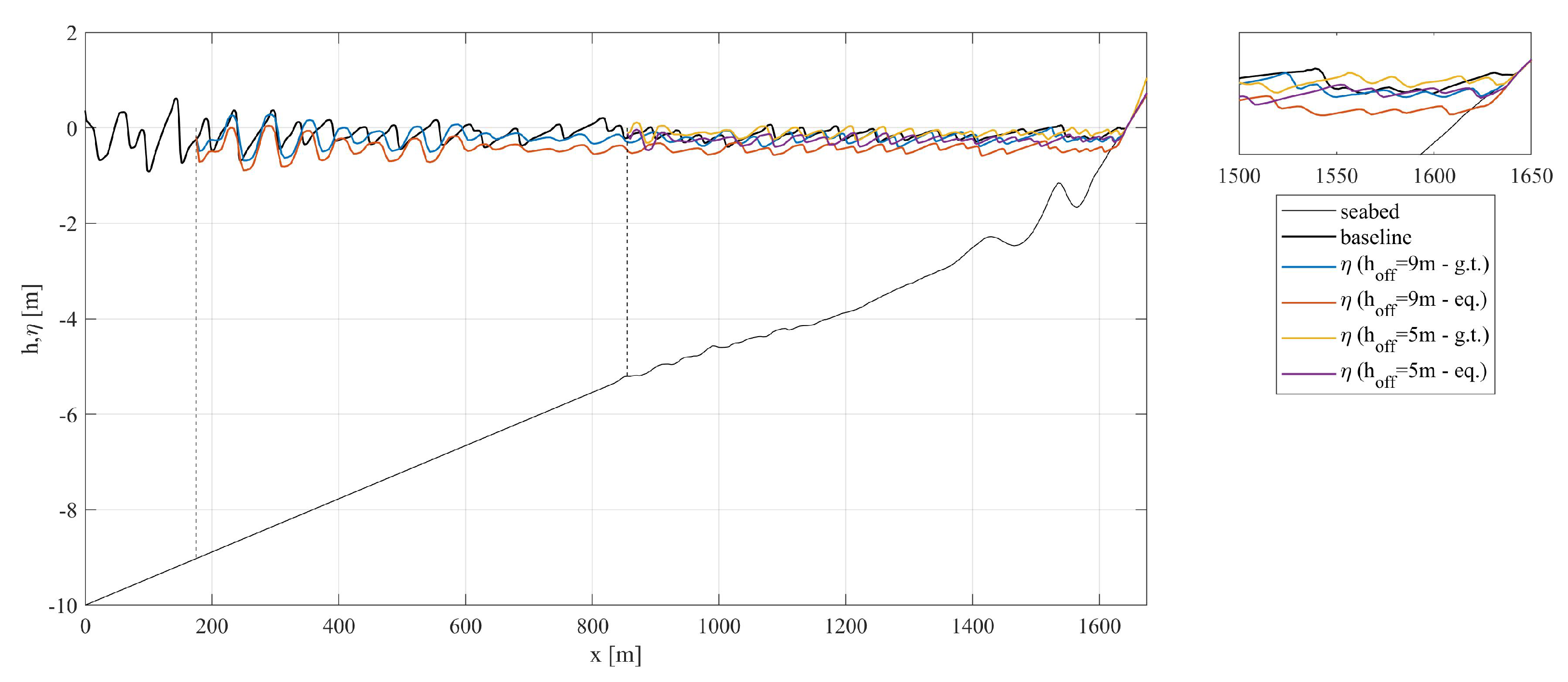
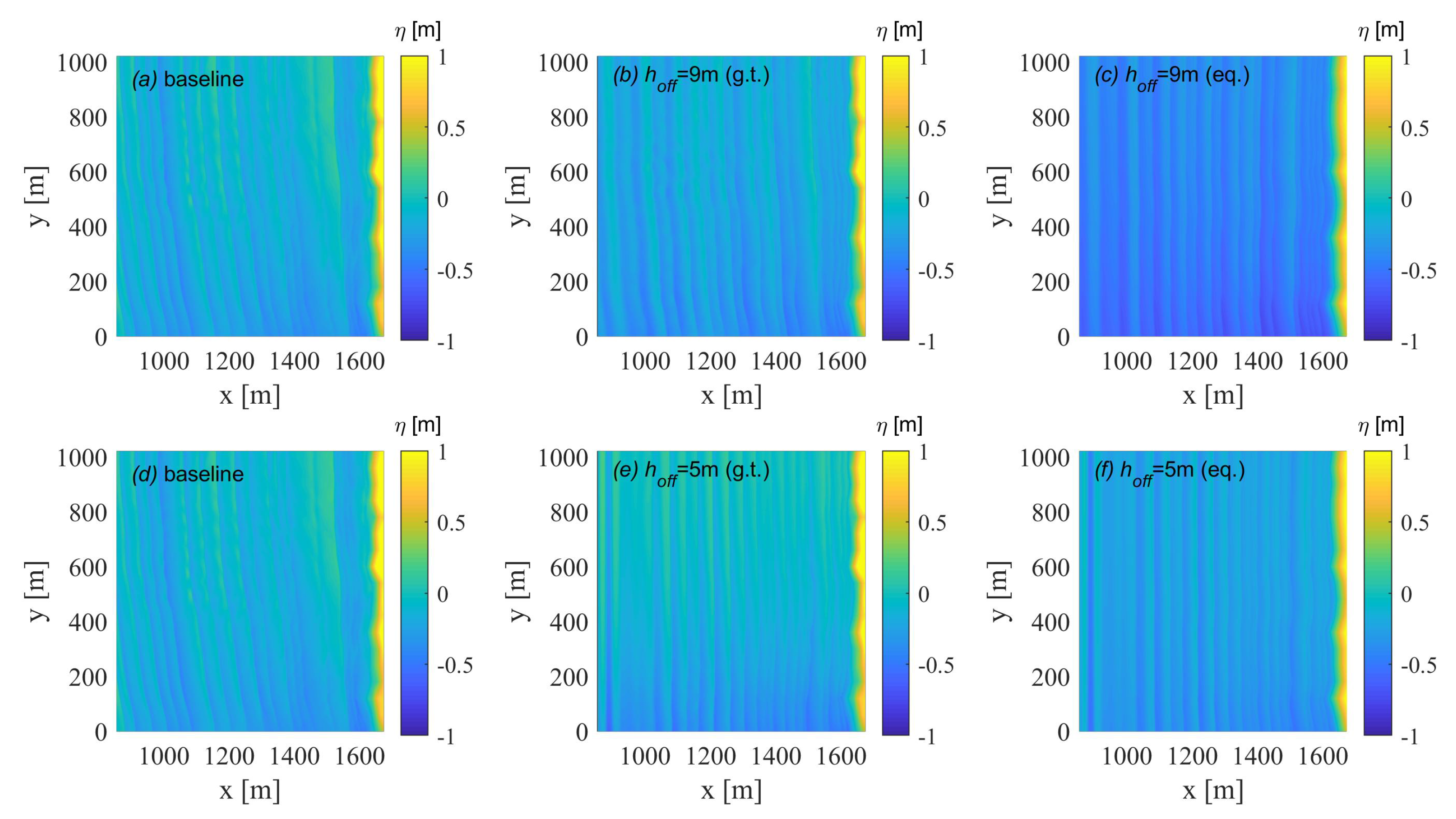
3.3. Step 3: Flood Simulations
3.4. Step 4: Beach Inundation
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- CCCuk. UK Climate Change Risk Assessment 2017. Synthesis report: Priorities for the next five years. In UK Climate Change Risk Assessment 2017 Synthesis Report of Committee on Climate Change; Technical Report; CCCuk: London, UK, 2016. [Google Scholar]
- Barcikowska, M.J.; Weaver, S.J.; Feser, F.; Russo, S.; Schenk, F.; Stone, D.A.; Wehner, M.F.; Zahn, M. Euro-Atlantic winter storminess and precipitation extremes under 1.5 ∘C vs. 2 ∘C warming scenarios. Earth Syst. Dyn. 2018, 9, 679–699. [Google Scholar] [CrossRef]
- Lin, N.; Emanuel, K.A.; Smith, J.A.; Vanmarcke, E. Risk assessment of hurricane storm surge for New York City. J. Geophys. Res. Atmos. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Bosom García, E.; Jiménez Quintana, J.A. Probabilistic coastal vulnerability assessment to storms at regional scale: application to Catalan beaches (NW Mediterranean). Nat. Hazards Earth Syst. Sci. 2011, 11, 475–484. [Google Scholar] [CrossRef]
- Perini, L.; Calabrese, L.; Salerno, G.; Ciavola, P.; Armaroli, C. Evaluation of coastal vulnerability to flooding: comparison of two different methodologies adopted by the Emilia-Romagna region (Italy). Nat. Hazards Earth Syst. Sci. 2016, 16, 181–194. [Google Scholar] [CrossRef] [Green Version]
- Leo, F.D.; Besio, G.; Zolezzi, G.; Bezzi, M. Coastal vulnerability assessment: through regional to local downscaling of wave characteristics along the Bay of Lalzit (Albania). Nat. Hazards Earth Syst. Sci. 2019, 19, 287–298. [Google Scholar] [CrossRef] [Green Version]
- Postacchini, M.; Lalli, F.; Memmola, F.; Bruschi, A.; Bellafiore, D.; Lisi, I.; Zitti, G.; Brocchini, M. A model chain approach for coastal inundation: Application to the bay of Alghero. Estuar. Coast. Shelf Sci. 2019, 219, 56–70. [Google Scholar] [CrossRef]
- Neumann, B.; Vafeidis, A.T.; Zimmermann, J.; Nicholls, R.J. Future coastal population growth and exposure to sea-level rise and coastal flooding—A global assessment. PLoS ONE 2015, 10, e0118571. [Google Scholar] [CrossRef] [PubMed]
- UNEP/MAP. Protocol on Integrated Coastal Zone Management in the Mediterranean; Technical Report; UNEP/MAP: Nairobi, Kenya, 2008. [Google Scholar]
- Rochette, J.; Bille, R. ICZM protocols to regional seas conventions: What? why? how? Mar. Policy 2012, 36, 977–984. [Google Scholar] [CrossRef]
- Ernoul, L.; Wardell-Johnson, A. Environmental discourses: Understanding the implications on ICZM protocol implementation in two Mediterranean deltas. Ocean Coast. Manag. 2015, 103, 97–108. [Google Scholar] [CrossRef]
- Herbers, T.; Jessen, P.; Janssen, T.; Colbert, D.; MacMahan, J. Observing ocean surface waves with GPS-tracked buoys. J. Atmos. Ocean. Technol. 2012, 29, 944–959. [Google Scholar] [CrossRef]
- Ohlmann, J.C.; Fewings, M.R.; Melton, C. Lagrangian observations of inner-shelf motions in Southern California: Can surface waves decelerate shoreward-moving drifters just outside the surf zone? J. Phys. Oceanogr. 2012, 42, 1313–1326. [Google Scholar] [CrossRef]
- Rogers, W.E.; Holland, K.T. A study of dissipation of wind-waves by mud at Cassino Beach, Brazil: Prediction and inversion. Cont. Shelf Res. 2009, 29, 676–690. [Google Scholar] [CrossRef]
- Brocchini, M.; Calantoni, J.; Postacchini, M.; Sheremet, A.; Staples, T.; Smith, J.; Reed, A.H.; Braithwaite, E.F., III; Lorenzoni, C.; Russo, A.; et al. Comparison between the wintertime and summertime dynamics of the Misa River estuary. Mar. Geol. 2017, 385, 27–40. [Google Scholar] [CrossRef] [Green Version]
- Melville, W.; Loewen, M.R.; Felizardo, F.C.; Jessup, A.T.; Buckingham, M. Acoustic and microwave signatures of breaking waves. Nature 1988, 336, 54. [Google Scholar] [CrossRef]
- Nieto Borge, J.; RodrÍguez, G.R.; Hessner, K.; González, P.I. Inversion of marine radar images for surface wave analysis. J. Atmos. Ocean. Technol. 2004, 21, 1291–1300. [Google Scholar] [CrossRef]
- Archetti, R.; Paci, A.; Carniel, S.; Bonaldo, D. Optimal index related to the shoreline dynamics during a storm: The case of Jesolo beach. Nat. Hazards Earth Syst. Sci. 2016, 16, 1107–1122. [Google Scholar] [CrossRef]
- Benetazzo, A.; Serafino, F.; Bergamasco, F.; Ludeno, G.; Ardhuin, F.; Sutherland, P.; Sclavo, M.; Barbariol, F. Stereo imaging and X-band radar wave data fusion: An assessment. Ocean Eng. 2018, 152, 346–352. [Google Scholar] [CrossRef] [Green Version]
- Díaz, H.; Catalán, P.; Wilson, G. Quantification of Two-Dimensional Wave Breaking Dissipation in the Surf Zone from Remote Sensing Data. Remote Sens. 2018, 10, 38. [Google Scholar]
- Bell, P.S.; Osler, J.C. Mapping bathymetry using X-band marine radar data recorded from a moving vessel. Ocean Dyn. 2011, 61, 2141–2156. [Google Scholar] [CrossRef]
- Ludeno, G.; Orlandi, A.; Lugni, C.; Brandini, C.; Soldovieri, F.; Serafino, F. X-band marine radar system for high-speed navigation purposes: A test case on a cruise ship. IEEE Geosci. Remote Sens. Lett. 2014, 11, 244–248. [Google Scholar] [CrossRef]
- Lund, B.; Graber, H.C.; Hessner, K.; Williams, N.J. On shipboard marine X-band radar near-surface current “calibration”. J. Atmos. Ocean. Technol. 2015, 32, 1928–1944. [Google Scholar] [CrossRef]
- Ludeno, G.; Brandini, C.; Lugni, C.; Arturi, D.; Natale, A.; Soldovieri, F.; Gozzini, B.; Serafino, F. Remocean system for the detection of the reflected waves from the costa concordia ship wreck. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3011–3018. [Google Scholar] [CrossRef]
- Ludeno, G.; Reale, F.; Dentale, F.; Carratelli, E.; Natale, A.; Soldovieri, F.; Serafino, F. An X-band radar system for bathymetry and wave field analysis in a harbour area. Sensors 2015, 15, 1691–1707. [Google Scholar] [CrossRef] [PubMed]
- Gangeskar, R. Ocean current estimated from X-band radar sea surface, images. IEEE Trans. Geosci. Remote Sens. 2002, 40, 783–792. [Google Scholar] [CrossRef]
- Senet, C.M.; Seemann, J.; Flampouris, S.; Ziemer, F. Determination of bathymetric and current maps by the method DiSC based on the analysis of nautical X-band radar image sequences of the sea surface (November 2007). IEEE Trans. Geosci. Remote Sens. 2008, 46, 2267–2279. [Google Scholar] [CrossRef]
- Young, I.R.; Rosenthal, W.; Ziemer, F. A three-dimensional analysis of marine radar images for the determination of ocean wave directionality and surface currents. J. Geophys. Res. Oceans 1985, 90, 1049–1059. [Google Scholar] [CrossRef] [Green Version]
- Senet, C.M.; Seemann, J.; Ziemer, F. The near-surface current velocity determined from image sequences of the sea surface. IEEE Trans. Geosci. Remote Sens. 2001, 39, 492–505. [Google Scholar] [CrossRef]
- Serafino, F.; Lugni, C.; Soldovieri, F. A novel strategy for the surface current determination from marine X-band radar data. IEEE Geosci. Remote Sens. Lett. 2010, 7, 231–235. [Google Scholar] [CrossRef]
- Ludeno, G.; Postacchini, M.; Natale, A.; Brocchini, M.; Lugni, C.; Soldovieri, F.; Serafino, F. Normalized Scalar Product Approach for Nearshore Bathymetric Estimation From X-Band Radar Images: An Assessment Based on Simulated and Measured Data. IEEE J. Ocean. Eng. 2018, 43, 221–237. [Google Scholar] [CrossRef]
- Bellafiore, D.; Zaggia, L.; Broglia, R.; Ferrarin, C.; Barbariol, F.; Zaghi, S.; Lorenzetti, G.; Manfè, G.; De Pascalis, F.; Benetazzo, A. Modeling ship-induced waves in shallow water systems: The Venice experiment. Ocean Eng. 2018, 155, 227–239. [Google Scholar] [CrossRef]
- Gaeta, M.; Bonaldo, D.; Samaras, A.; Carniel, S.; Archetti, R. Coupled Wave-2D Hydrodynamics Modeling at the Reno River Mouth (Italy) under Climate Change Scenarios. Water 2018, 10, 1380. [Google Scholar] [CrossRef]
- Brocchini, M.; Bernetti, R.; Mancinelli, A.; Albertini, G. An efficient solver for nearshore flows based on the WAF method. Coast. Eng. 2001, 43, 105–129. [Google Scholar] [CrossRef]
- Briganti, R.; Torres-Freyermuth, A.; Baldock, T.E.; Brocchini, M.; Dodd, N.; Hsu, T.J.; Jiang, Z.; Kim, Y.; Pintado-Patiño, J.C.; Postacchini, M. Advances in numerical modelling of swash zone dynamics. Coast. Eng. 2016, 115, 26–41. [Google Scholar] [CrossRef]
- Kennedy, A.B.; Chen, Q.; Kirby, J.T.; Dalrymple, R.A. Boussinesq modeling of wave transformation, breaking, and runup. I: 1D. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 39–47. [Google Scholar] [CrossRef]
- Antuono, M.; Colicchio, G.; Lugni, C.; Greco, M.; Brocchini, M. A depth semi-averaged model for coastal dynamics. Phys. Fluids 2017, 29, 056603. [Google Scholar] [CrossRef] [Green Version]
- Tonelli, M.; Petti, M. Hybrid finite volume—Finite difference scheme for 2DH improved Boussinesq equations. Coast. Eng. 2009, 56, 609–620. [Google Scholar] [CrossRef]
- Shi, F.; Kirby, J.T.; Harris, J.C.; Geiman, J.D.; Grilli, S.T. A high-order adaptive time-stepping TVD solver for Boussinesq modeling of breaking waves and coastal inundation. Ocean Model. 2012, 43, 36–51. [Google Scholar] [CrossRef]
- Ludeno, G.; Nasello, C.; Raffa, F.; Ciraolo, G.; Soldovieri, F.; Serafino, F. A comparison between drifter and X-band wave radar for sea surface current estimation. Remote Sens. 2016, 8, 695. [Google Scholar] [CrossRef]
- Plant, W. Studies of backscattered sea return with a CW, dual-frequency, X-band radar. IEEE J. Ocean. Eng. 1977, 2, 28–36. [Google Scholar] [CrossRef]
- Lee, P.; Barter, J.; Beach, K.; Hindman, C.; Lake, B.; Rungaldier, H.; Shelton, J.; Williams, A.; Yee, R.; Yuen, H. X band microwave backscattering from ocean waves. J. Geophys. Res. Oceans 1995, 100, 2591–2611. [Google Scholar] [CrossRef]
- Wetzel, L.B. Electromagnetic scattering from the sea at low grazing angles. In Surface Waves and Fluxes; Springer: Dordrecht, The Netherlands, 1990; pp. 109–171. [Google Scholar]
- Hessner, K.; Reichert, K.; Borge, J.C.N.; Stevens, C.L.; Smith, M.J. High-resolution X-band radar measurements of currents, bathymetry and sea state in highly inhomogeneous coastal areas. Ocean Dyn. 2014, 64, 989–998. [Google Scholar] [CrossRef]
- Ludeno, G.; Flampouris, S.; Lugni, C.; Soldovieri, F.; Serafino, F. A novel approach based on marine radar data analysis for high-resolution bathymetry map generation. IEEE Geosci. Remote Sens. Lett. 2014, 11, 234–238. [Google Scholar] [CrossRef]
- Raffa, F.; Ludeno, G.; Patti, B.; Soldovieri, F.; Mazzola, S.; Serafino, F. X-band wave radar for coastal upwelling detection off the southern coast of Sicily. J. Atmos. Ocean. Technol. 2017, 34, 21–31. [Google Scholar] [CrossRef]
- Lund, B.; Collins, C.O.; Graber, H.C.; Terrill, E.; Herbers, T.H. Marine radar ocean wave retrieval’s dependency on range and azimuth. Ocean Dyn. 2014, 64, 999–1018. [Google Scholar] [CrossRef]
- Kriebel, D.L.; Dean, R.G. Convolution method for time-dependent beach-profile response. J. Waterw. Port Coast. Ocean Eng. 1993, 119, 204–226. [Google Scholar] [CrossRef]
- Soldini, L.; Antuono, M.; Brocchini, M. Numerical modeling of the influence of the beach profile on wave run-up. J. Waterw. Port Coast. Ocean Eng. 2013, 139, 61–71. [Google Scholar] [CrossRef]
- Postacchini, M.; Soldini, L.; Lorenzoni, C.; Mancinelli, A. Medium-term dynamics of a middle Adriatic barred beach. Ocean Sci. 2017, 13, 719. [Google Scholar] [CrossRef]
- Parlagreco, L.; Melito, L.; Devoti, S.; Perugini, E.; Soldini, L.; Zitti, G.; Brocchini, M. Monitoring for Coastal Resilience: Preliminary Data from Five Italian Sandy Beaches. Sensors 2019, 19, 1854. [Google Scholar] [CrossRef]
- Melito, L.; Postacchini, M.; Sheremet, A.; Calantoni, J.; Zitti, G.; Darvini, G.; Brocchini, M. Hydrodynamics at a Microtidal Inlet: Analysis of Propagation of the Main Wave Components. Estuar. Coast. Shelf Sci. 2019. under review. [Google Scholar]
- Liu, Z.; Frigaard, P. Generation and Analysis of Random Waves; Technical Report; Aalborg Universitet: Aalborg, Denmark, 1990. [Google Scholar]
- Dean, R.G. Equilibrium beach profiles: Characteristics and applications. J. Coast. Res. 1991, 7, 53–84. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Type | ||||
|---|---|---|---|---|
| [m] | [s] | [] | [] | |
| ESE | 1.51 | 7.25 | 67 | −22 |
| NNE | 2.25 | 6.75 | 40 | 5 |
| Wave Type | Bathymetry | ||||
|---|---|---|---|---|---|
| [m] | [m] | [s] | [] | ||
| ESE | ground-truth | 9.22 | 0.62 | 7.35 | −17 |
| ESE | equilibrium | 9.22 | 0.62 | 7.35 | −17 |
| ESE | ground-truth | 5.34 | 0.33 | 7.8 | −10 |
| ESE | equilibrium | 5.34 | 0.33 | 7.8 | −10 |
| NNE | ground-truth | 9.23 | 1.32 | 6.8 | 0 |
| NNE | equilibrium | 9.23 | 1.32 | 6.8 | 0 |
| NNE | ground-truth | 5.14 | 0.64 | 7.8 | 0 |
| NNE | equilibrium | 5.14 | 0.64 | 7.8 | 0 |
| Wave Type | Bathymetry | ||
|---|---|---|---|
| [m] | [m] | ||
| ESE | ground-truth | 9 | 2.28 |
| ESE | equilibrium | 9 | 2.34 |
| ESE | ground-truth | 5 | 2.26 |
| ESE | equilibrium | 5 | 2.34 |
| NNE | ground-truth | 9 | 7.67 |
| NNE | equilibrium | 9 | 8.07 |
| NNE | ground-truth | 5 | 8.40 |
| NNE | equilibrium | 5 | 8.05 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Postacchini, M.; Ludeno, G. Combining Numerical Simulations and Normalized Scalar Product Strategy: A New Tool for Predicting Beach Inundation. J. Mar. Sci. Eng. 2019, 7, 325. https://doi.org/10.3390/jmse7090325
Postacchini M, Ludeno G. Combining Numerical Simulations and Normalized Scalar Product Strategy: A New Tool for Predicting Beach Inundation. Journal of Marine Science and Engineering. 2019; 7(9):325. https://doi.org/10.3390/jmse7090325
Chicago/Turabian StylePostacchini, Matteo, and Giovanni Ludeno. 2019. "Combining Numerical Simulations and Normalized Scalar Product Strategy: A New Tool for Predicting Beach Inundation" Journal of Marine Science and Engineering 7, no. 9: 325. https://doi.org/10.3390/jmse7090325