A Wave Energy Converter Design Load Case Study


Abstract
:1. Introduction
2. Materials and Methods
2.1. Reference Model 3 Wave Energy Converter
2.2. Environmental Conditions
2.3. Design Load Analyses
2.3.1. WAMIT Simulations
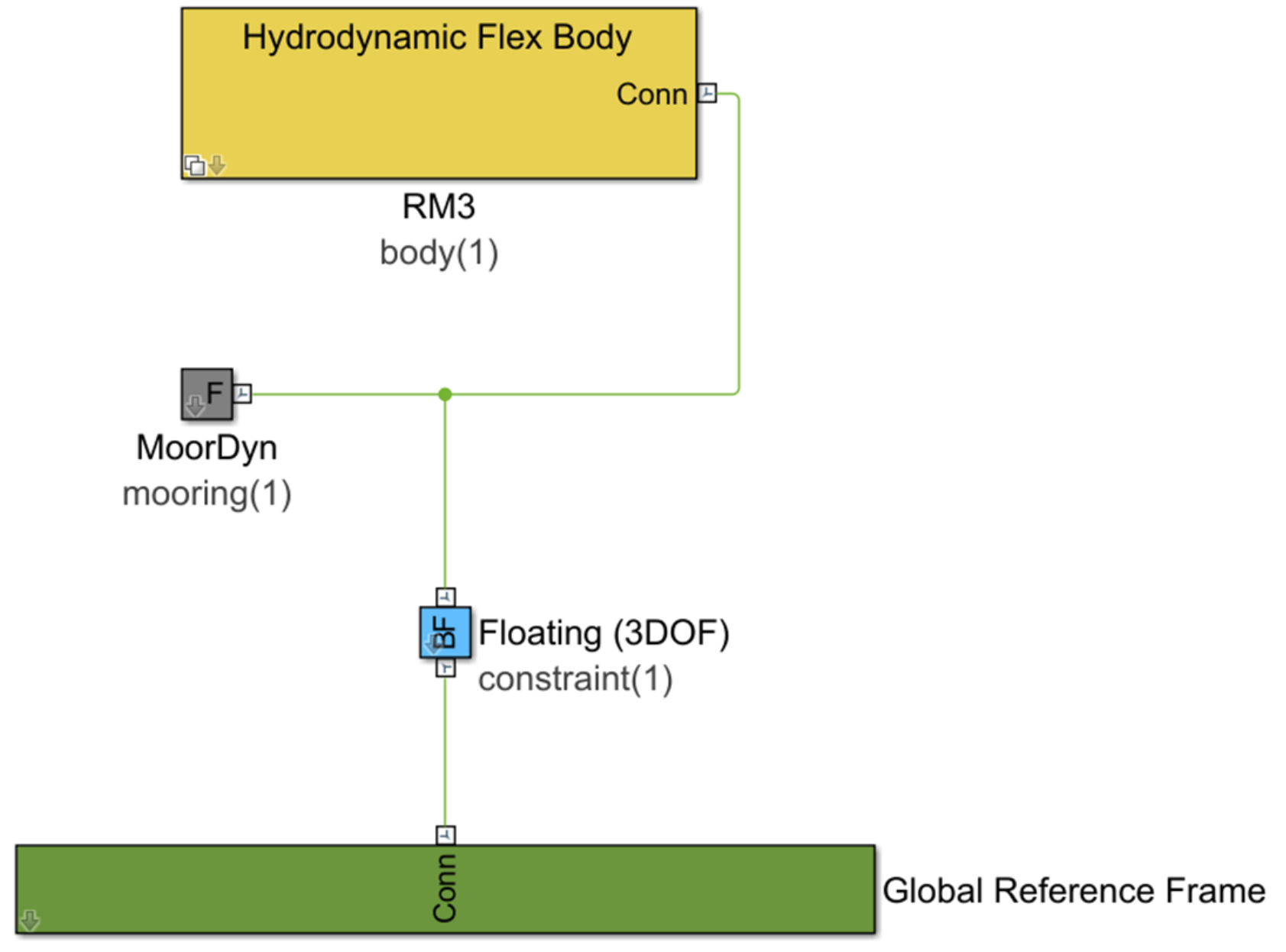
2.3.2. WEC-Sim Simulations
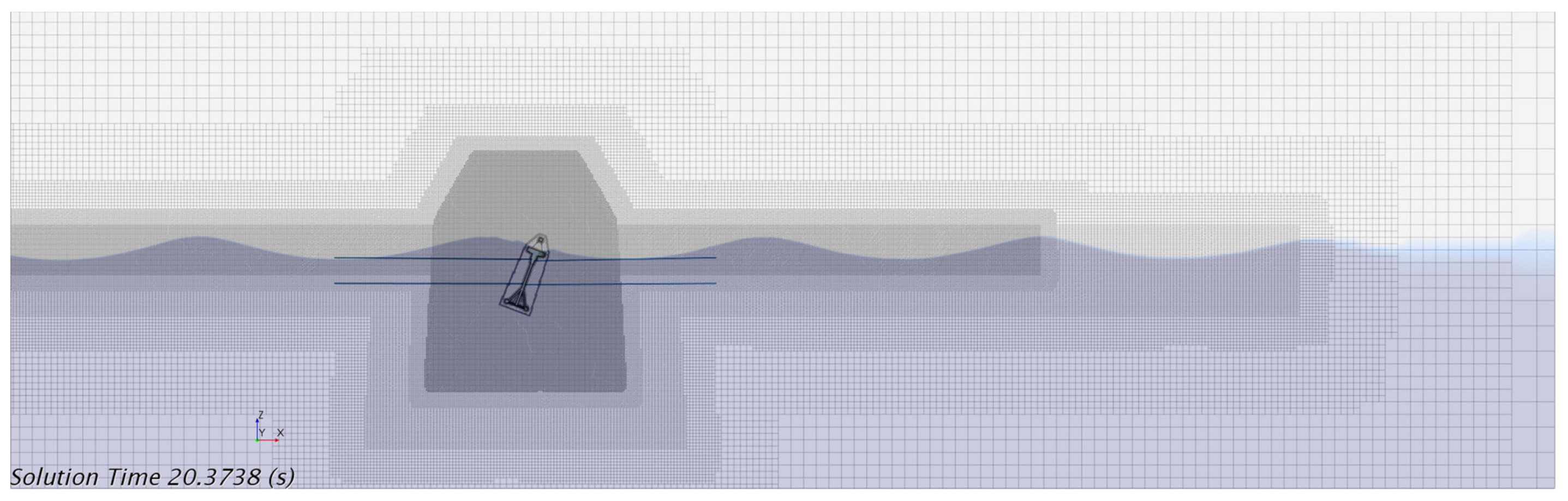
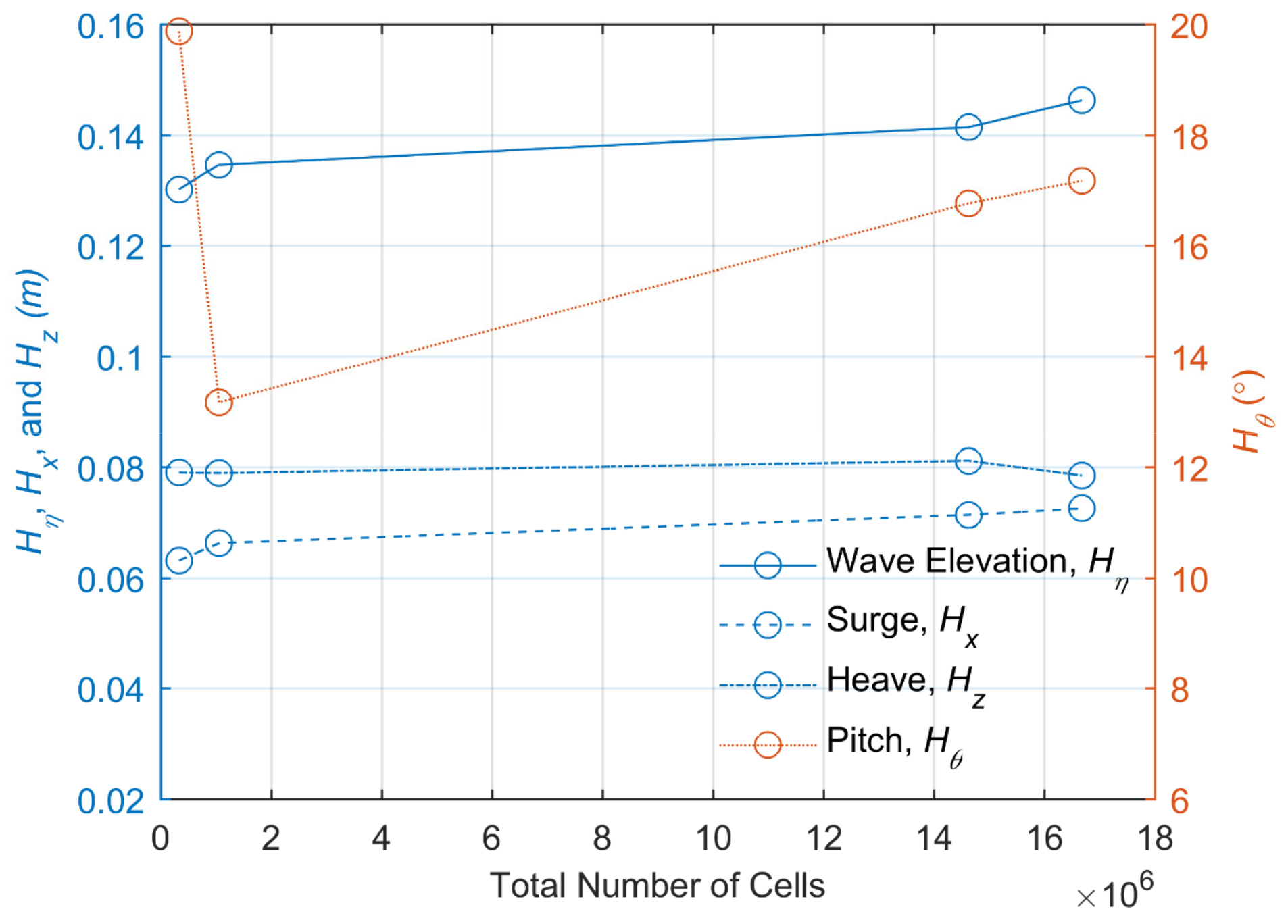
2.3.3. STAR-CCM+ Simulations
Regular Wave Simulations
Most-Likely Extreme Response-Focused Wave Simulations
3. Results
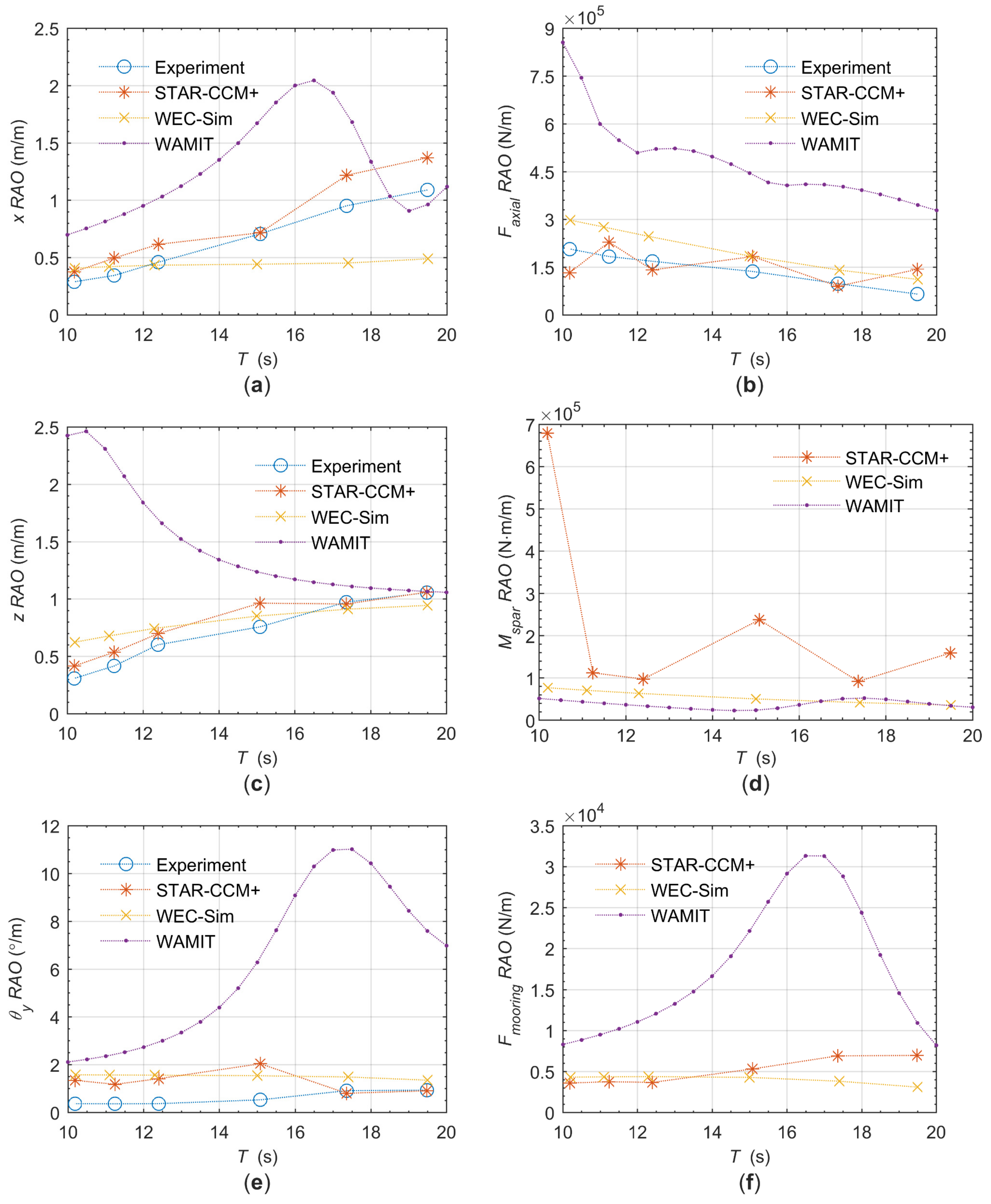
3.1. WAMIT and WEC-Sim Simulation Results
3.2. STAR-CCM+ Regular Wave Simulation Results
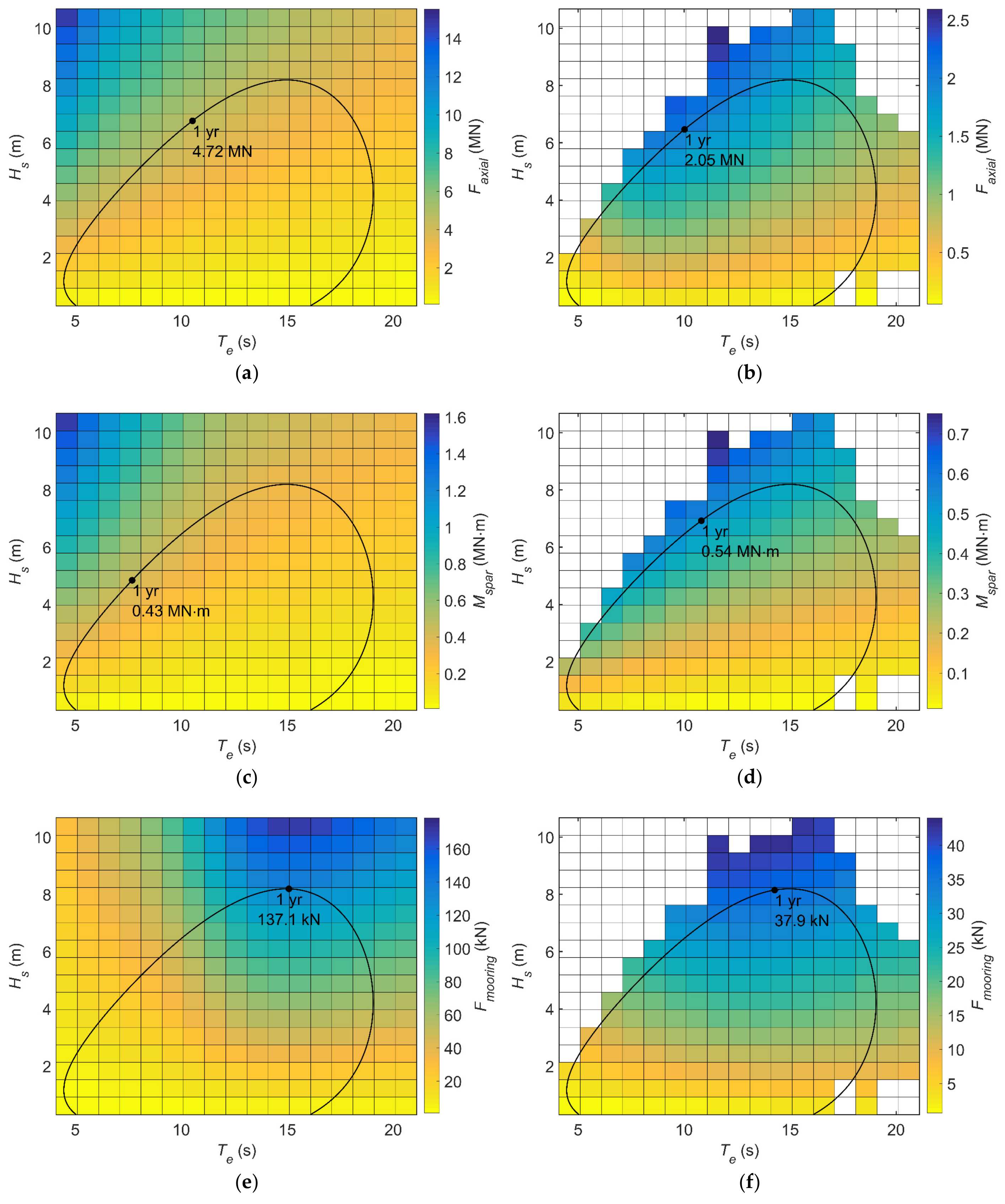
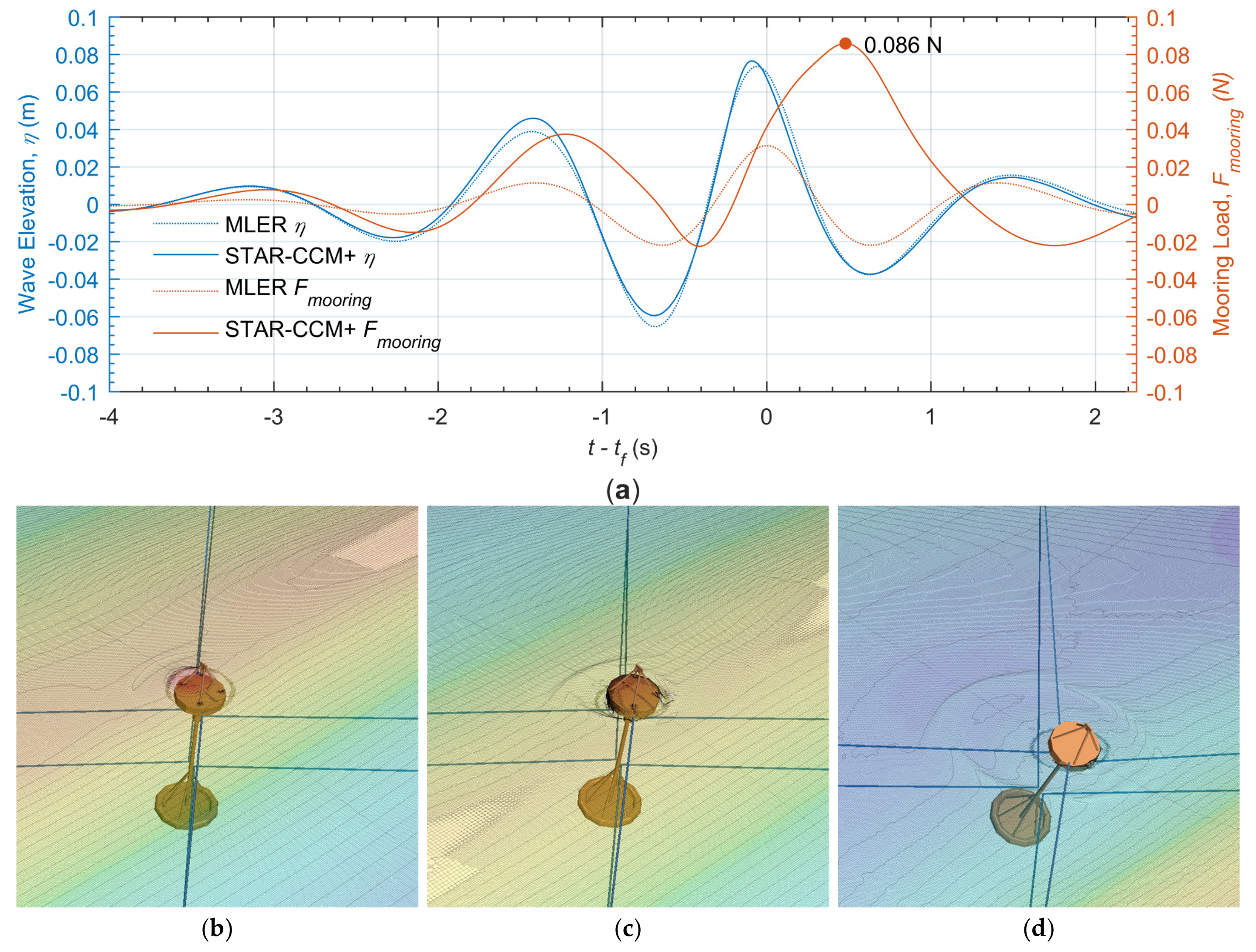
3.3. STAR-CCM+ Most-Likely Extreme Response-Focused Wave Simulation Results
4. Discussion and Conclusions
- This case study demonstrates one possible design load evaluation framework. However, the evaluation of WEC design loads is still a subject of research, and there are many other possible frameworks and methods for analysis. Even so, with current computational limitations, it will generally be necessary with any analysis framework to follow a progression from low-fidelity modeling methods to high-fidelity modeling methods, as done in this study, to efficiently use high-fidelity simulations and accurately calculate the design loads.
- For WEC configurations in which responses are mostly linear, the design load evaluation framework used in this study will suffice, as shown in previous studies [6,28]. However, based on the results of this study, when using the generalized body modes method, for anything but the simplest geometries, multiple mode shapes of each type and/or FEA-derived mode shapes should be used to obtain accurate structural load estimates using low- and mid-fidelity modeling methods.
- For WEC configurations in which the responses are only slightly nonlinear, the design load evaluation framework demonstrated here should still be sufficient, but with an additional design load evaluation stage in which weakly nonlinear restoring and Froude–Krylov forcing terms are included in WEC-Sim, or similar, models [2,25]. It might be an interesting future study to reconsider the design load evaluation framework demonstrated in this study with the inclusion of this step.
- In this case study, regular waves were more effective in estimating the design loads than focused waves. With this in mind, it may be beneficial in future studies to estimate the nonlinearities of the system (using the low- and mid-fidelity modeling results) prior to conducting focused wave simulations. If the wave structure interactions are expected to be highly nonlinear, high-fidelity regular wave, or even irregular wave, simulations may be more informative.
- Recently, computational advances have made 3-h irregular wave CFD simulations possible, as reported in [29]. With this as an option, a very informative potential future study could be to compare the accuracy of equivalent regular and focused wave load results, for a given sea state, to 3-h irregular wave load results.
- For WEC configurations in which the wave structure interactions and responses are highly nonlinear, new computationally efficient, high-fidelity simulation methods must be developed to accurately evaluate WEC design loads and the conditions under which they occur. In the near term, this could potentially include the development of linear-RANS hybrid models. In the long term, it is possible that computational capabilities may be advanced enough that the all-sea-state, long-term irregular wave, RANS-FEA simulations can be run directly.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Coe, R.; Yu, Y.-H.; van Rij, J. A Survey of WEC Reliability, Survival and Design Practices. Energies 2017, 11, 4. [Google Scholar] [CrossRef]
- Van Rij, J.; Yu, Y.-H.; Coe, R.G. Design Load Analysis for Wave Energy Converters. In Proceedings of the 37th International Conference on Ocean, Offshore & Arctic Engineering (OMAE2018), Madrid, Spain, 17–22 June 2018. [Google Scholar]
- International Electrotechnical Commission. Marine Energy—Wave, Tidal and Other Water Current Converters—Part 2: Design Requirements for Marine Energy Systems; IEC: Geneva, Switzerland, 2016. [Google Scholar]
- NORSOK. Actions and Action Effects; Standards Norway: Oslo, Norway, 2007. [Google Scholar]
- Det Norske Veritas. Recommended Practice: Environmental Conditions and Environmental Loads; DNV: Oslo, Norway, 2007. [Google Scholar]
- Quon, E.; Platt, A.; Yu, Y.-H.; Lawson, M. Application of the Most Likely Extreme Response Method for Wave Energy Converters. In Proceedings of the 35th International Conference on Ocean, Offshore and Arctic Engineering (OMAE2016), Busan, Korea, 19–24 June 2016. [Google Scholar]
- Lee, C.; Newman, J. WAMIT® User Manual Version 7.1; WAMIT, Inc.: Chestnut Hill, MA, USA, 2015. [Google Scholar]
- NEMOH. Available online: https://lheea.ec-nantes.fr/logiciels-et-brevets/nemoh-presentation-192863.kjsp?RH=1489593406974 (accessed on 29 July 2019).
- Van Rij, J.; Yu, Y.-H.; Guo, Y. Structural Loads Analysis for Wave Energy Converters. In Proceedings of the 36th International Conference on Ocean, Offshore & Arctic Engineering (OMAE2017), Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Newman, J.N. Wave effects on deformable bodies. Appl. Ocean Res. 1994, 16, 47–59. [Google Scholar] [CrossRef]
- WEC-Sim. Available online: https://wec-sim.github.io/WEC-Sim/ (accessed on 29 July 2019).
- Guo, Y.; Yu, Y.-H.; van Rij, J.; Tom, N. Inclusion of Structural Flexibility in Design Load Analysis for Wave Energy Converters. In Proceedings of the European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Yu, Y.-H.; Lawson, M.; Li, Y.; Previsic, M.; Epler, J.; Lou, J. Experimental Wave Tank Test for Reference Model 3 Floating-Point Absorber Wave Energy Converter Project; National Renewable Energy Laboratory: Golden, CO, USA, 2015. [Google Scholar]
- Reference Model Project. Available online: https://energy.sandia.gov/energy/renewable-energy/water-power/technology-development/reference-model-project-rmp/ (accessed on 29 July 2019).
- Coe, R.; Michelen, C.; Eckert-Gallup, A.; Yu, Y.-H.; van Rij, J. WDRT: A Toolbox for design-response analysis of wave energy converters. In Proceedings of the Proceedings of the 4th Marine Energy Technology Symposium (METS2016), Washington, DC, USA, 25–27 April 2016. [Google Scholar]
- Coe, R.; Michelen, C.; Eckert-Gallup, A.; Martin, N.; van Rij, J.; Yu, Y.-H.; Quon, E.; Manuel, L.; Nguyen, P.; Canning, J.; et al. WEC Design Response Toolbox (WDRT). Available online: https://wec-sim.github.io/WDRT/ (accessed on 29 July 2019).
- Kert-Gallup, A.C.; Sallaberry, C.J.; Dallman, A.R.; Neary, V.S. Application of principal component analysis (PCA) and improved joint probability distributions to the inverse first-order reliability method (I-FORM) for predicting extreme sea states. Ocean Eng. 2016, 112, 307–319. [Google Scholar] [CrossRef] [Green Version]
- Kelly, S.G. Theory and Problems of Mechanical Vibrations; McGraw-Hill: New York, NY, USA, 1993. [Google Scholar]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Cummins, W.E. The Impulse Response Function and Ship Motions; Department of the Navy, David Taylor Model Basin: Bethesda, MD, USA, 1962. [Google Scholar]
- Hall, M. MoorDyn User’s Guide; Department of Mechanical Engineering, University of Maine: Orono, ME, USA, 2015. [Google Scholar]
- Michelen, C.; Coe, R. Comparison of Methods for Estimating Short-Term Extreme Response of Wave Energy Converters. In Proceedings of the IEEE Oceans 2015, Washington, DC, USA, 19–22 October 2015. [Google Scholar]
- Coe, R.G.; Michelen, C.; Eckert-Gallup, A.; Sallaberry, C. Full long-term design response analysis of a wave energy converter. Renew. Energy 2018, 116, 356–366. [Google Scholar] [CrossRef]
- STAR-CCM+ | MDX. Available online: https://mdx.plm.automation.siemens.com/star-ccm-plus (accessed on 29 July 2019).
- Van Rij, J.; Yu, Y.-H.; Tom, N. Validation of Simulated Wave Energy Converter Responses to Focused Waves for CCP-WSI Blind Test Series 2. In Proceedings of the 13th European Wave and Tidal Energy Conference Series (EWTEC), Napoli, Italy, 1–6 September 2019. [Google Scholar]
- Ransley, E.J.; Greaves, D.; Raby, A.; Simmonds, D.; Hann, M. Survivability of wave energy converters using CFD. Renew. Energy 2017, 109, 235–247. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.-H.; Li, Y. Reynolds-Averaged Navier–Stokes simulation of the heave performance of a two-body floating-point absorber wave energy system. Comput. Fluids 2013, 73, 104–114. [Google Scholar] [CrossRef]
- Coe, R.G.; Rosenberg, B.J.; Quon, E.W.; Chartrand, C.C.; Yu, Y.-H.; van Rij, J.; Mundon, T.R. CFD design-load analysis of a two-body wave energy converter. J. Ocean Eng. Mar. Energy 2019, 5, 1–19. [Google Scholar] [CrossRef]
- Baquet, A.; Jang, H.; Lim, H.-J.; Kyoung, J.; Tcherniguin, N.; Lefebvre, T.; Kim, J. CFD-Based Numerical Wave Basin for FPSO in Irregular Waves. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value | Units |
|---|---|---|
| m | 0.313 | kg |
| Ix | 8.89 × 10−3 | kg·m2 |
| Iy | 8.89 × 10−3 | kg·m2 |
| zcg | −0.214 | m |
| zmooring,top | −0.051 | m |
| zmooring,bottom | −0.213 | m |
| kmooring | 0.700 | N/m |
| Parameter | Setting | Units |
|---|---|---|
| ρwater | 1000 | kg/m3 |
| μwater | 8.887 × 10−4 | Pa·s |
| ρair | 1.184 | kg/m3 |
| μair | 1.855 × 10−5 | Pa·s |
| Test Number | H (m) | T (s) | Total Cells | ||
|---|---|---|---|---|---|
| 12 | 14.86 | 19.49 | 25 | 125 | 7.72 × 106 |
| 13 | 15.10 | 17.36 | 25 | 97 | 7.14 × 106 |
| 14 | 15.38 | 15.08 | 25 | 144 | 8.36 × 106 |
| 15 | 15.38 | 12.40 | 25 | 98 | 7.36 × 106 |
| 16 | 15.26 | 11.24 | 30 | 194 | 16.68 × 106 |
| 17 | 14.92 | 10.19 | 30 | 163 | 15.63 × 106 |
| Load | H (m) | T (s) | Total Cells | ||||
|---|---|---|---|---|---|---|---|
| 0.065 | 1.002 | 0.124 | 0.831 | 40 | 349 | 21.35 × 106 | |
| 0.069 | 1.082 | 0.131 | 0.897 | 40 | 383 | 23.81 × 106 | |
| 0.081 | 1.427 | 0.154 | 1.183 | 40 | 568 | 29.79 × 106 |
| Model | ||||||
|---|---|---|---|---|---|---|
| WAMIT | 0.569 | 0.939 | 4.865 | 3.732 × 105 | 1.900 × 105 | 1.054 × 104 |
| WEC-Sim | 0.264 | 0.164 | 0.935 | 6.633 × 104 | 1.729 × 105 | 1.670 × 103 |
| STAR-CCM+ | 0.159 | 0.092 | 0.747 | 4.652 × 104 | - | - |
| Design Load Method | Sea-State Realization Method | Modeling Method | Faxial (MN) | Mspar (MN·m) | Fmooring (kN) |
|---|---|---|---|---|---|
| One-dimensional | Regular waves | WAMIT | 12.15 | 0.79 | 445.7 |
| WEC-Sim | 4.44 | 1.15 | 67.1 | ||
| STAR-CCM+ | 3.34 | 9.48 | 102.4 | ||
| Experiment | 3.09 | - | - | ||
| Contour * | Irregular waves | WAMIT | 4.72 | 0.43 | 137.1 |
| WEC-Sim | 2.05 | 0.54 | 37.9 | ||
| Long term All-sea-state | Irregular waves | WAMIT | 5.55 | 0.49 | 161.2 |
| WEC-Sim | 2.72 | 0.82 | 50.0 | ||
| Contour * | MLER wave | STAR-CCM+ | 0.64 | 0.59 | 85.7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
van Rij, J.; Yu, Y.-H.; Guo, Y.; Coe, R.G. A Wave Energy Converter Design Load Case Study. J. Mar. Sci. Eng. 2019, 7, 250. https://doi.org/10.3390/jmse7080250
van Rij J, Yu Y-H, Guo Y, Coe RG. A Wave Energy Converter Design Load Case Study. Journal of Marine Science and Engineering. 2019; 7(8):250. https://doi.org/10.3390/jmse7080250
Chicago/Turabian Stylevan Rij, Jennifer, Yi-Hsiang Yu, Yi Guo, and Ryan G. Coe. 2019. "A Wave Energy Converter Design Load Case Study" Journal of Marine Science and Engineering 7, no. 8: 250. https://doi.org/10.3390/jmse7080250