Tripod-Supported Offshore Wind Turbines: Modal and Coupled Analysis and a Parametric Study Using X-SEA and FAST


Abstract
:1. Introduction
2. Development of Coupled Analysis for OWT and Tripod Support Structures
2.1. Wind Turbine Dynamics
2.2. Structural Dynamics of Substructures
2.3. Hydrodynamics in X-SEA
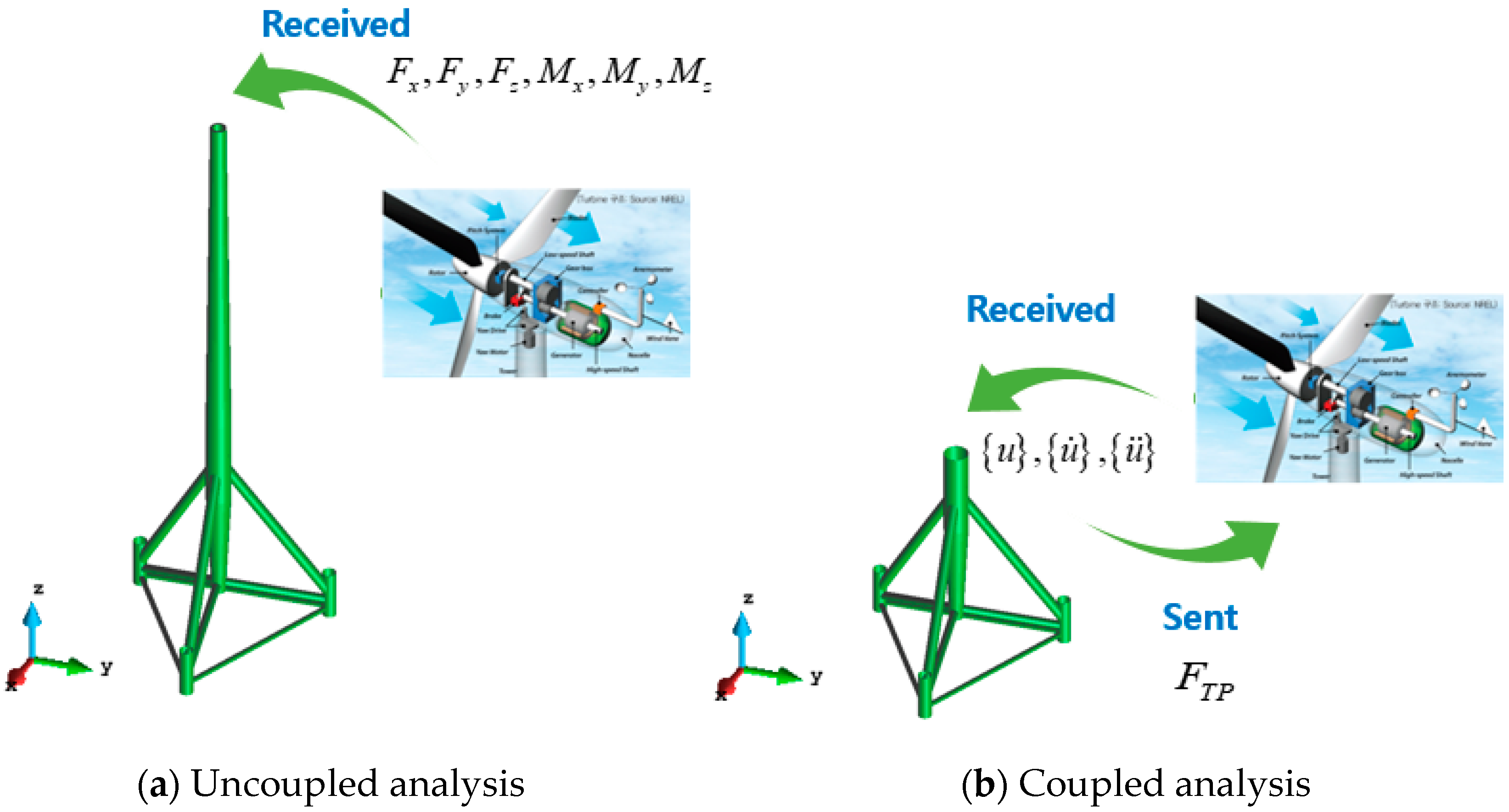
2.4. Coupled Dynamic Analysis of Offshore Wind Turbine and Support Structures
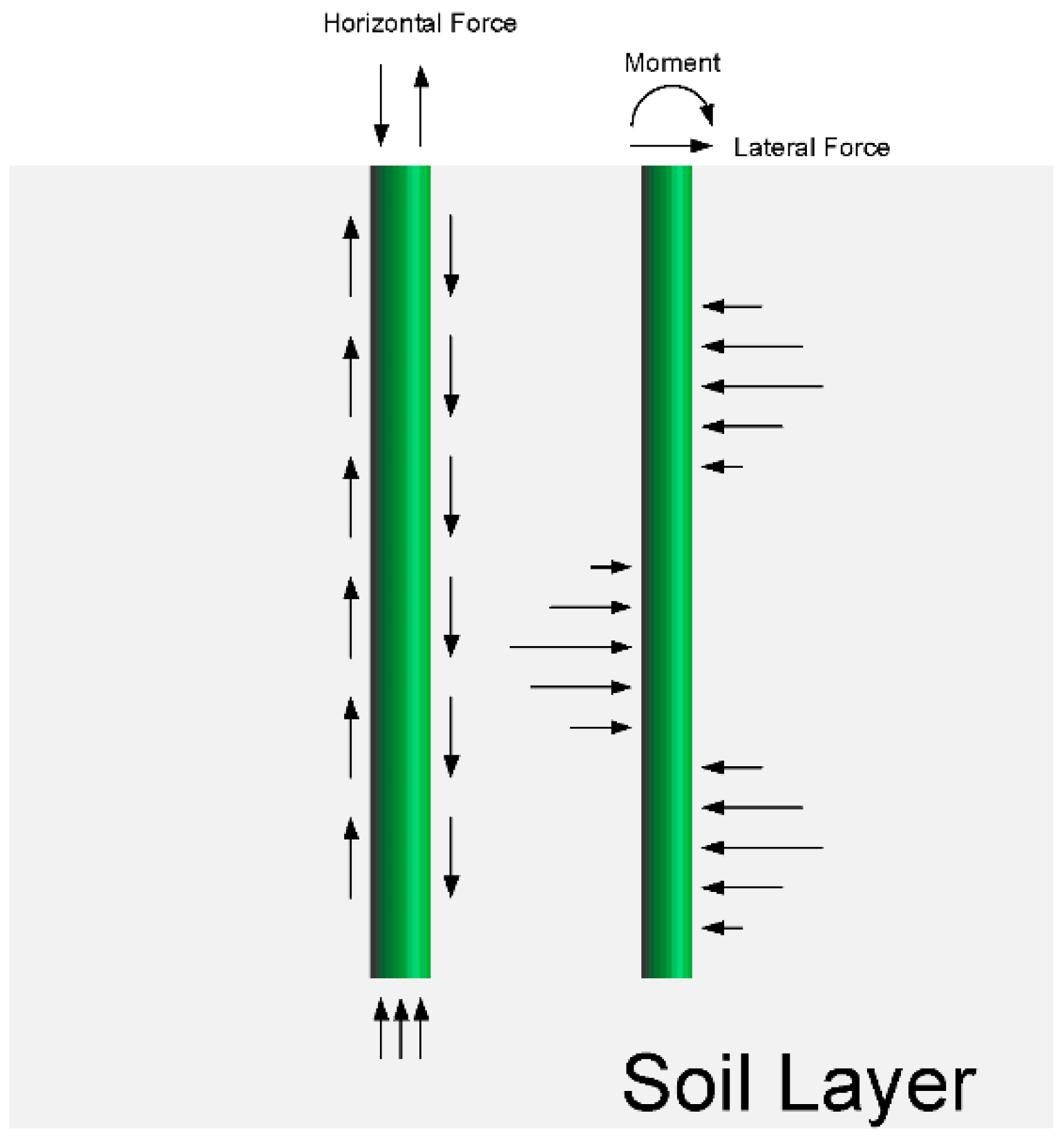
2.5. Soil-Pile-Structure Interaction Analysis
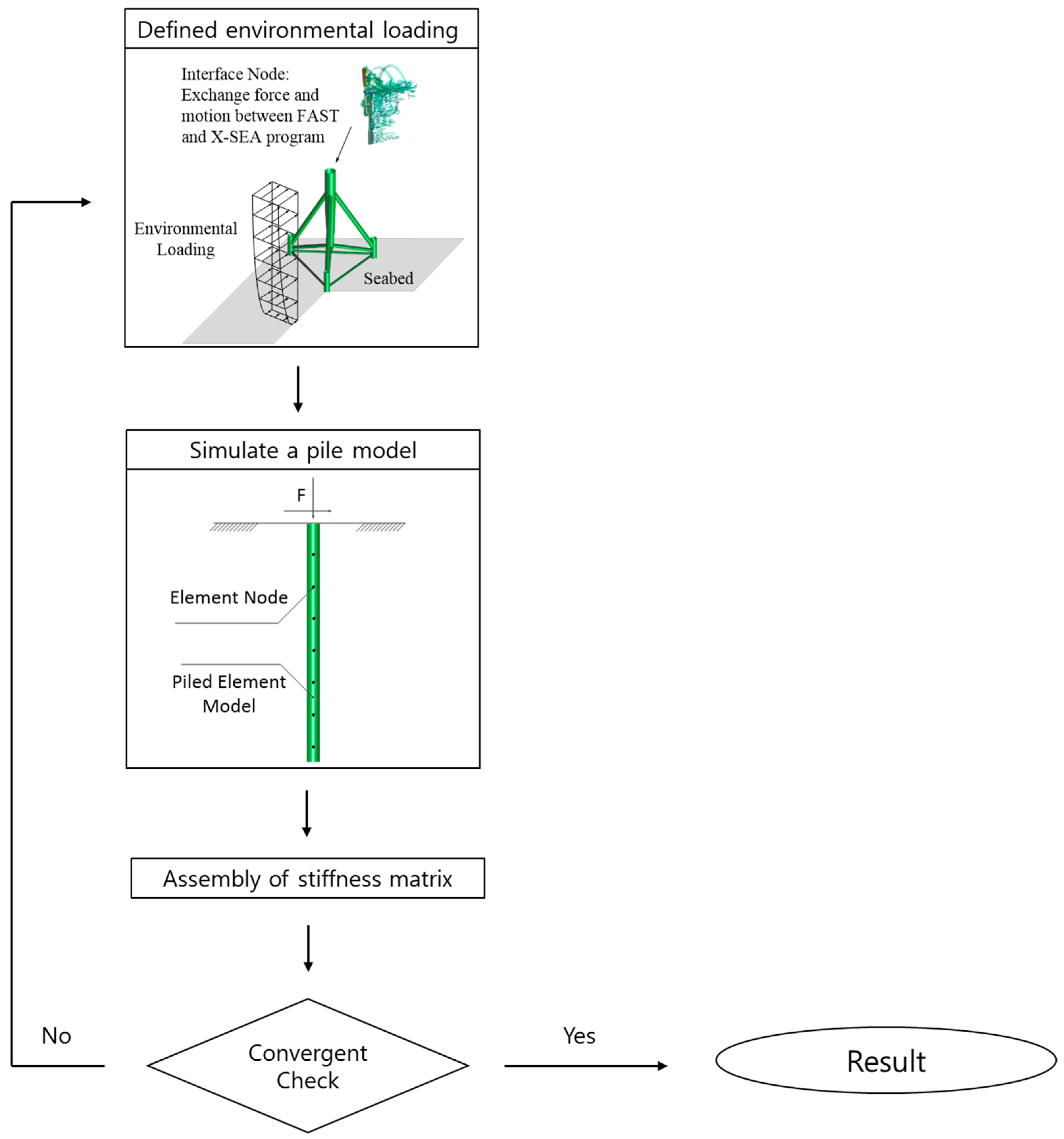
2.6. A Scheme for Coupled Analysis Including the Soil-Pile-Structure Interaction
3. Numerical Example
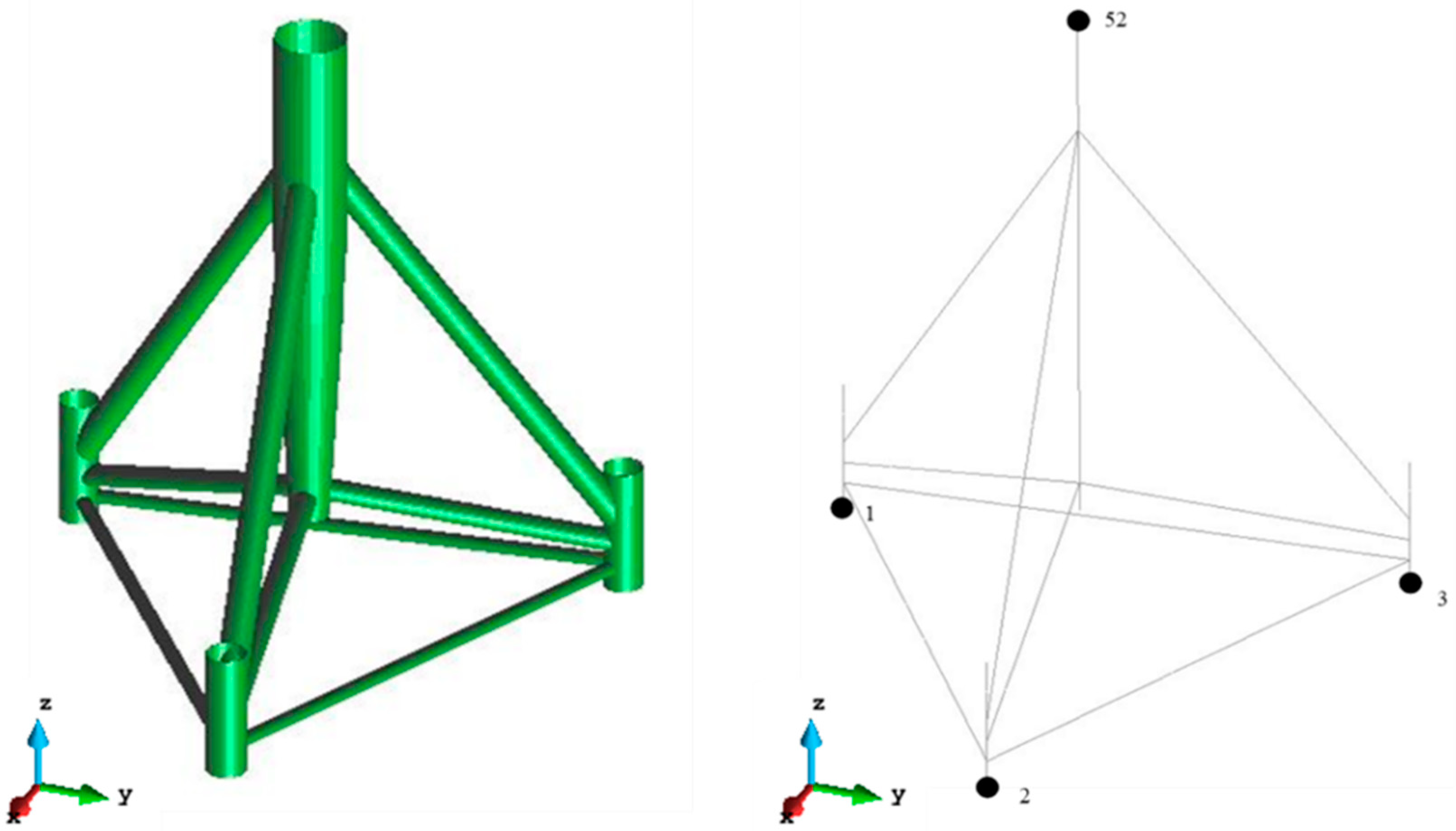
3.1. Verification of Tripod Structures Supporting NREL 5MW Offshore Wind Turbines
3.2. Parametric Study of Tripod/Jacket-Supported Offshore Wind Turbines
3.3. Coupled Analysis of OWT Support Structures Including the Pile-Soil-Structure Interaction
4. Concluding Remarks
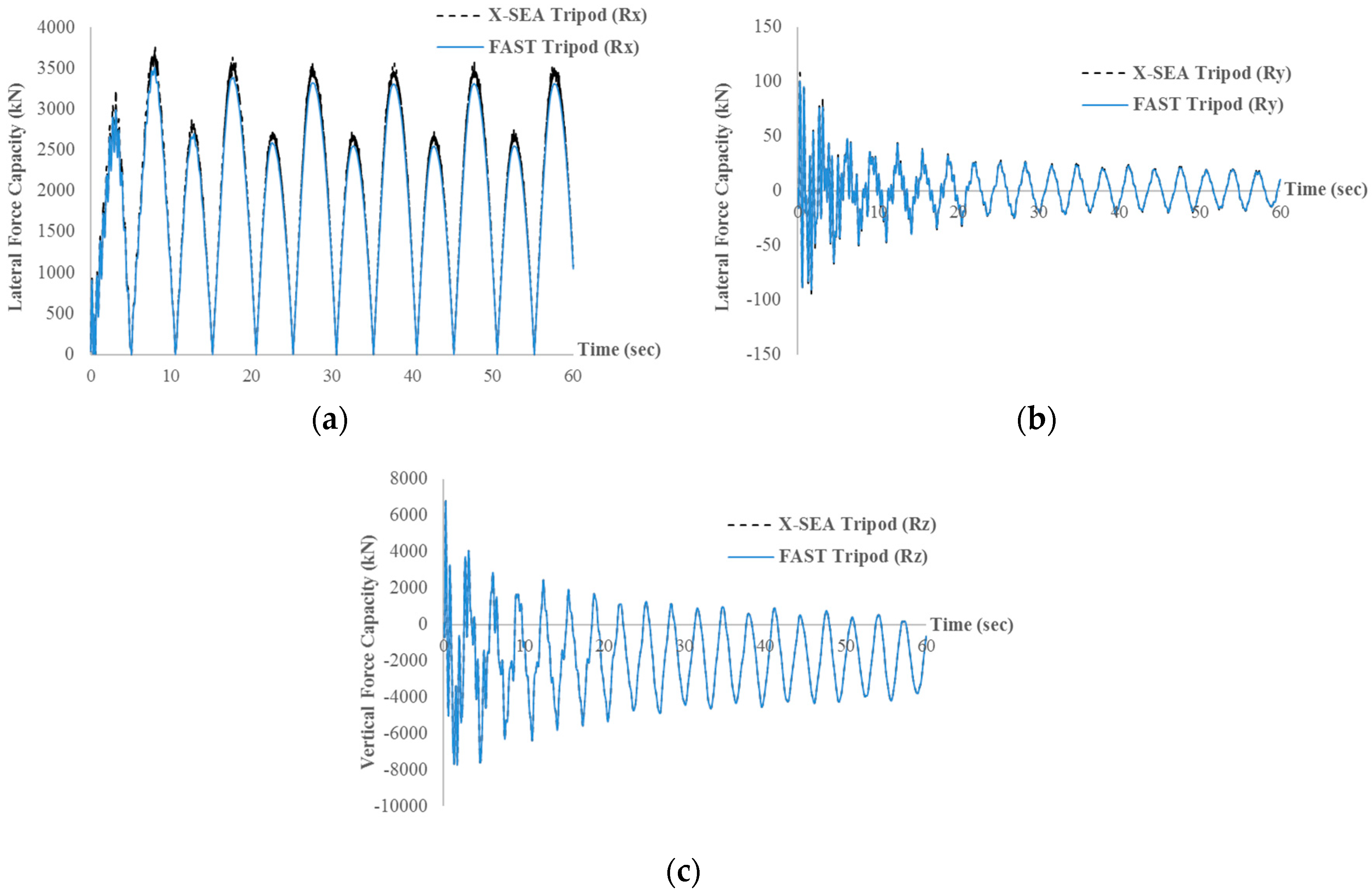
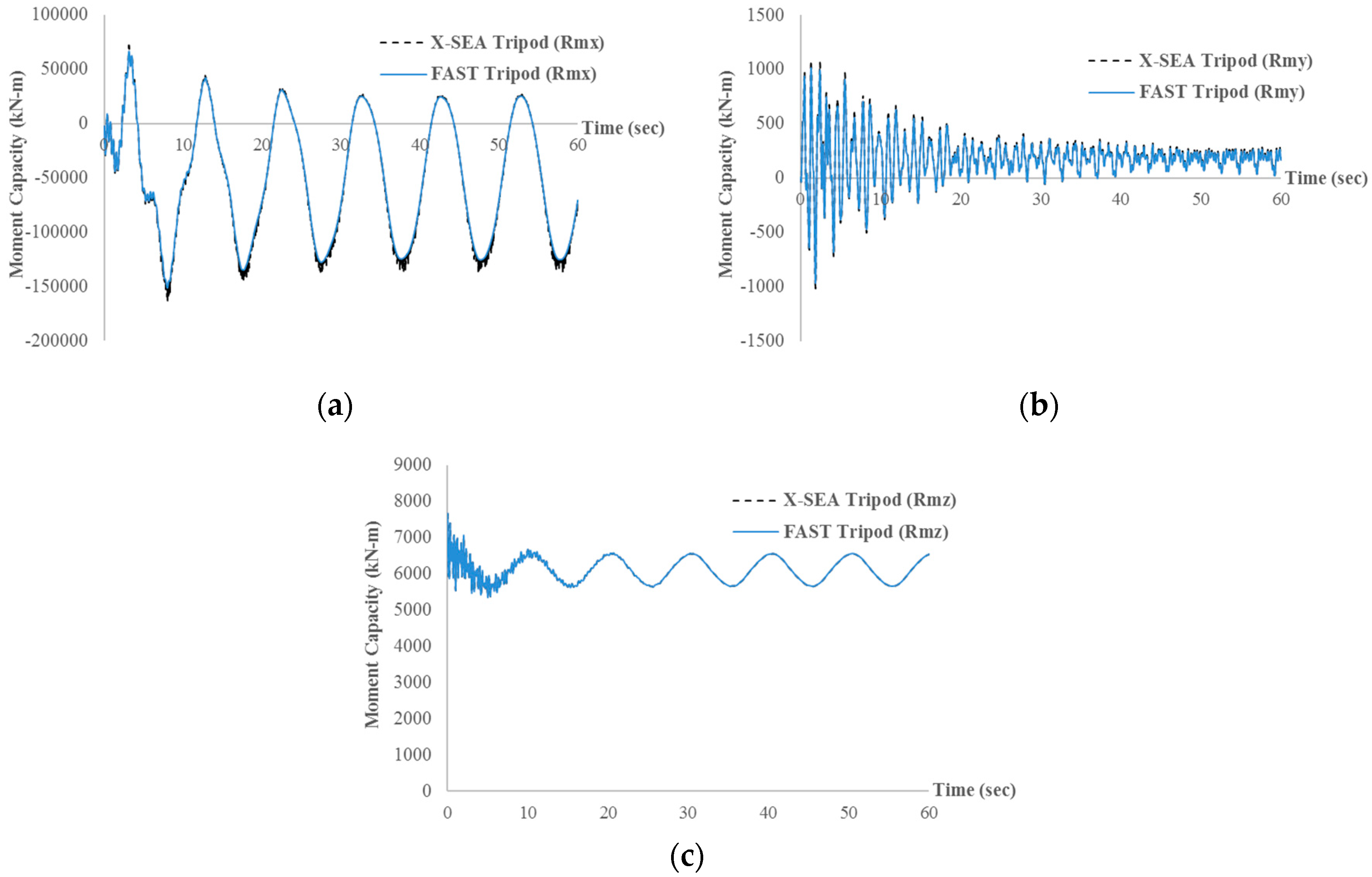
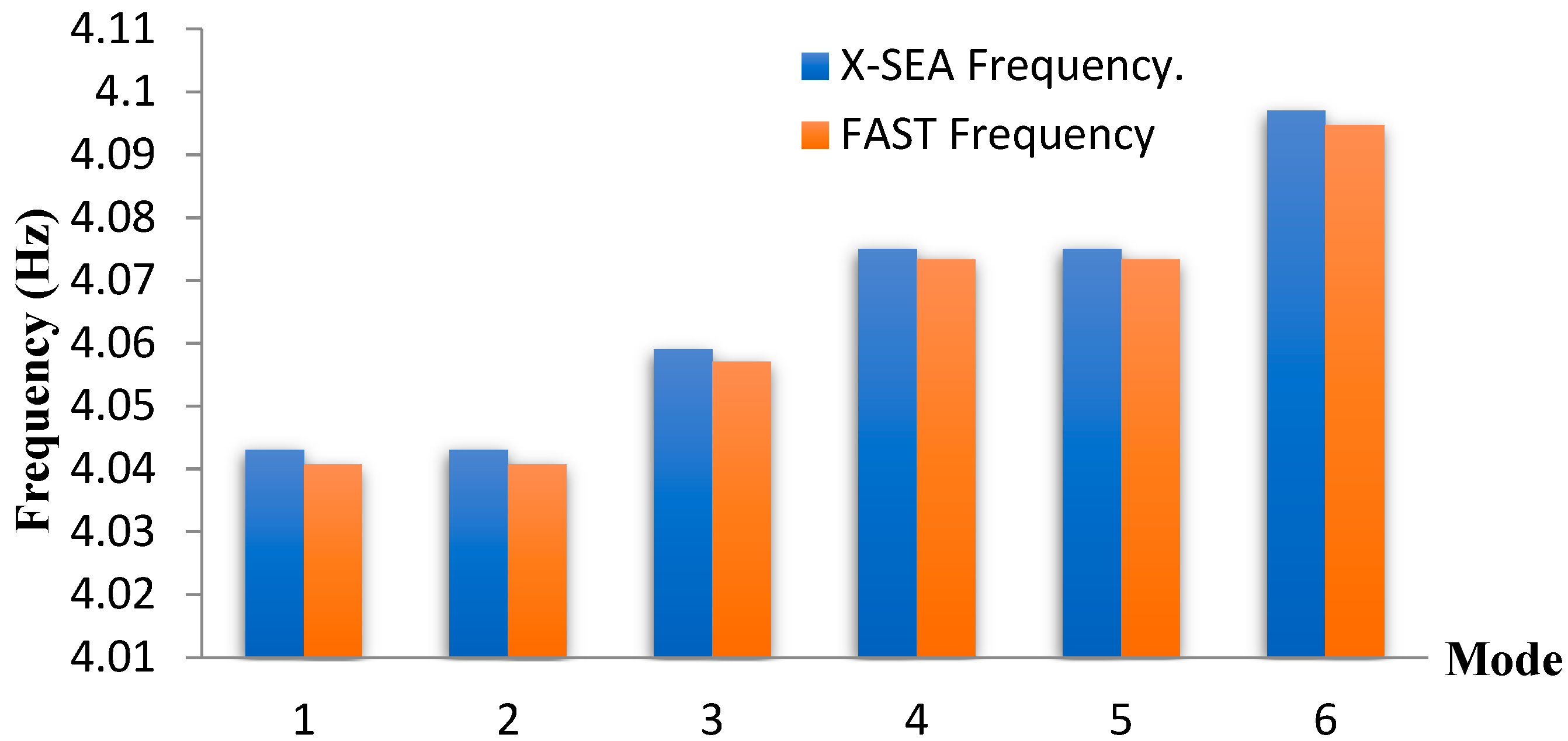
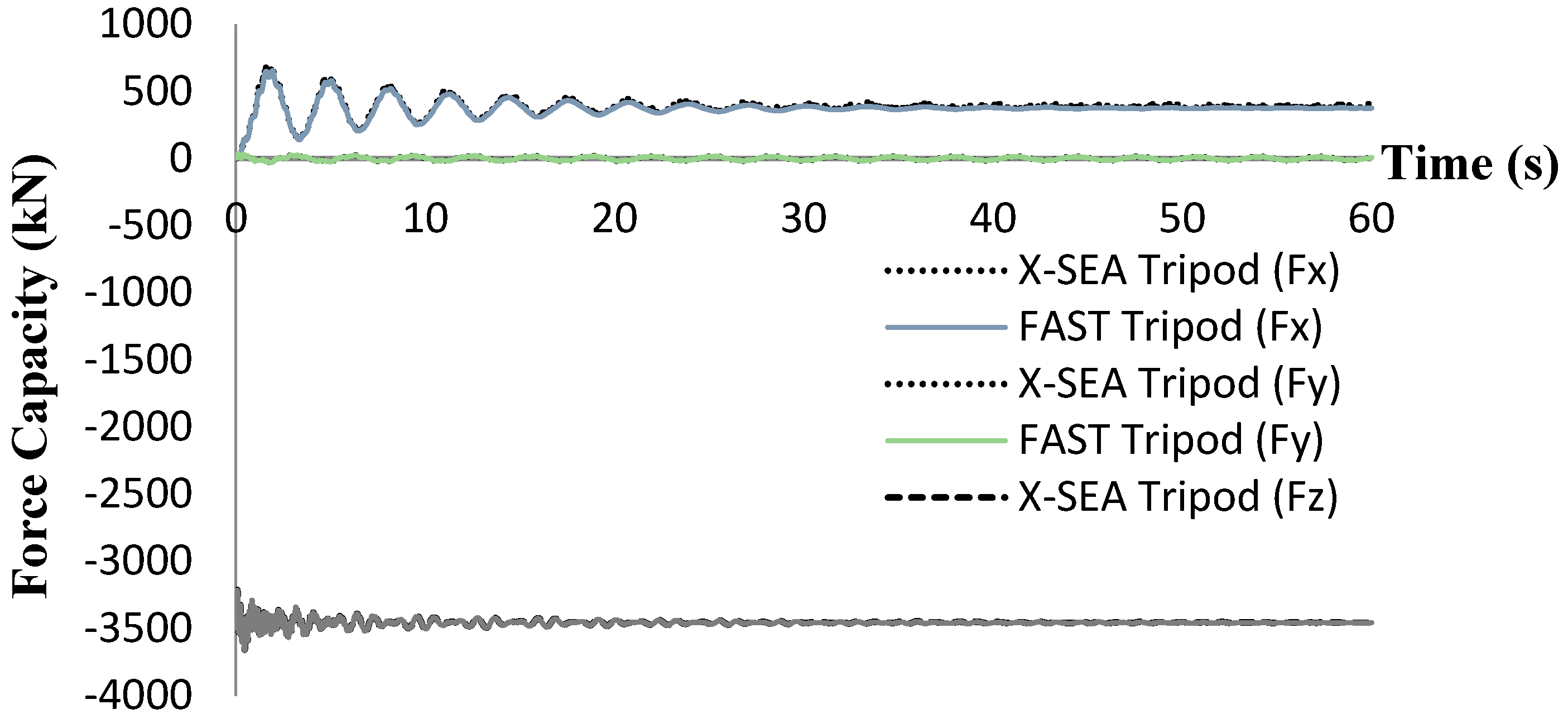
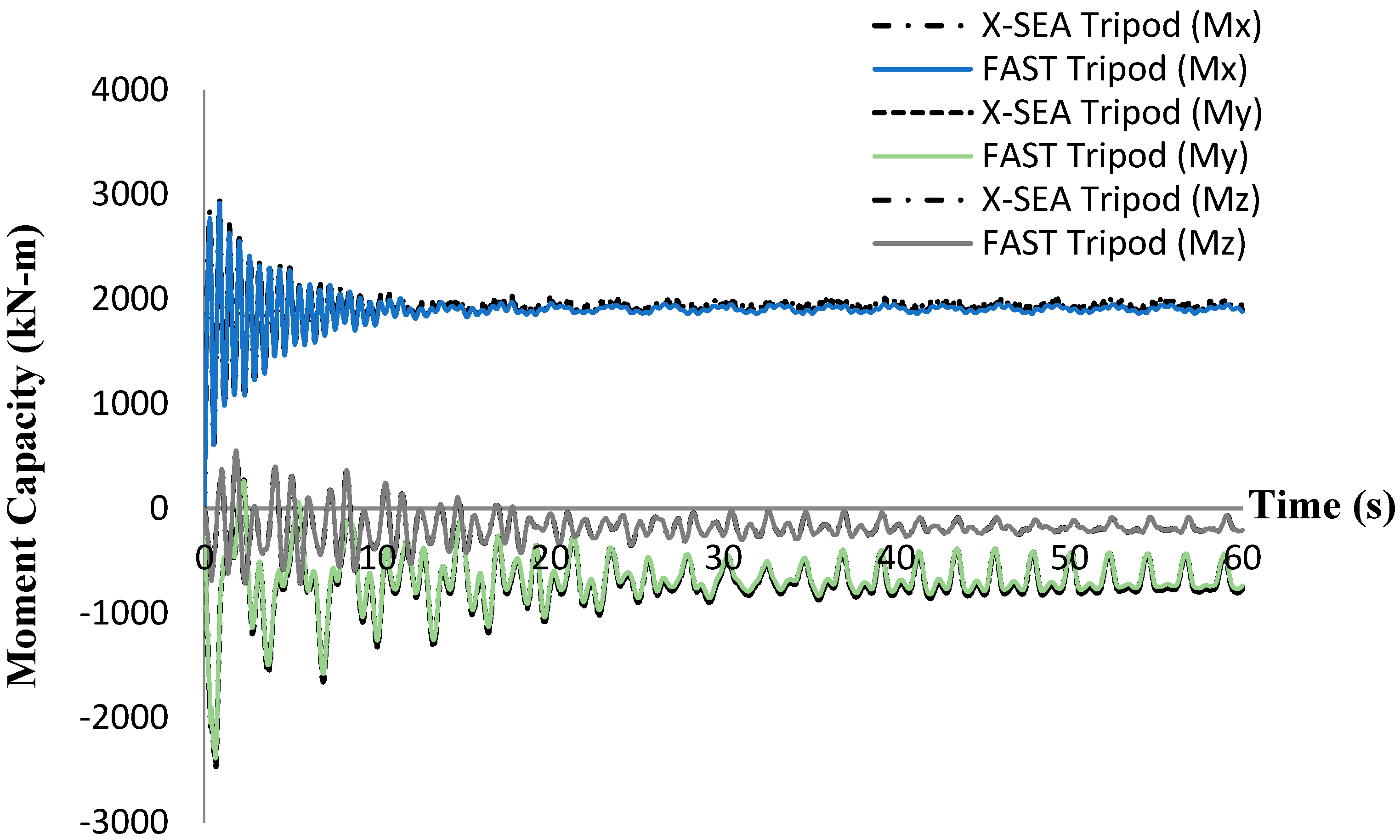
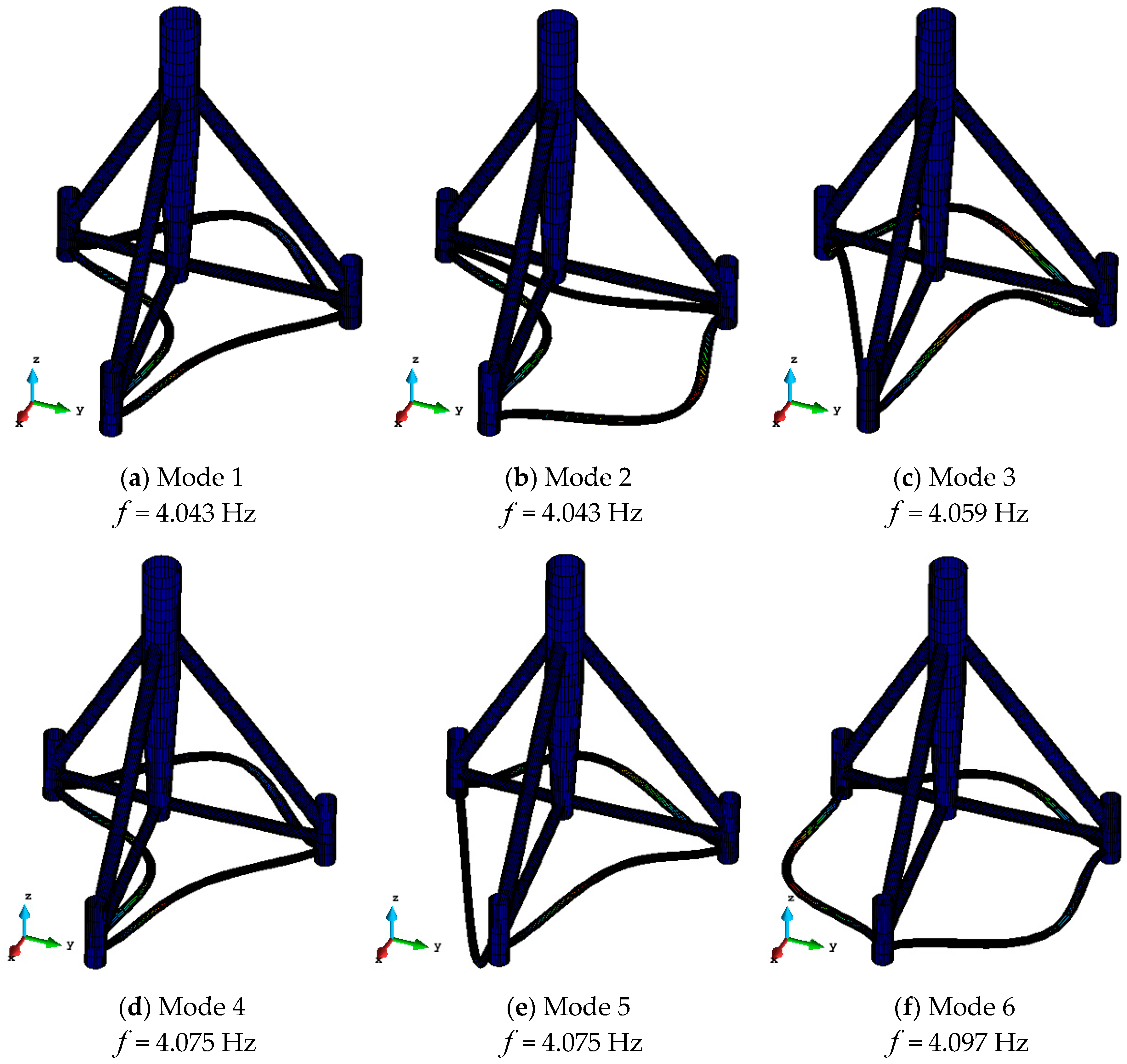
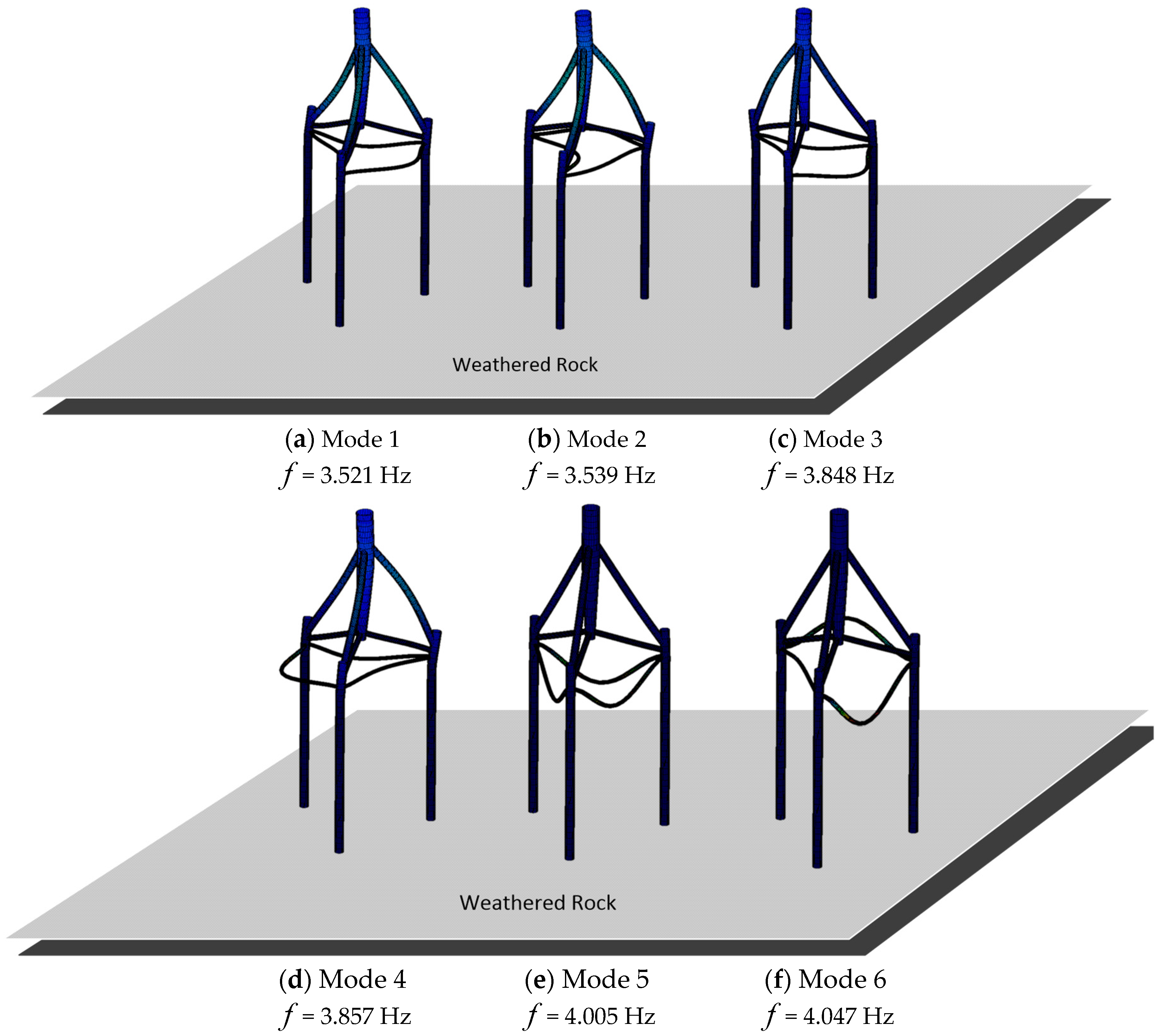
- For the tripod structure itself, the first to sixth modes are oscillating at a local member connected to the pile head. The sixth mode is the globally bending mode. The reaction forces and moments, natural frequencies and top-tower forces that resulted from X-SEA were in good agreement with those that resulted from FAST.
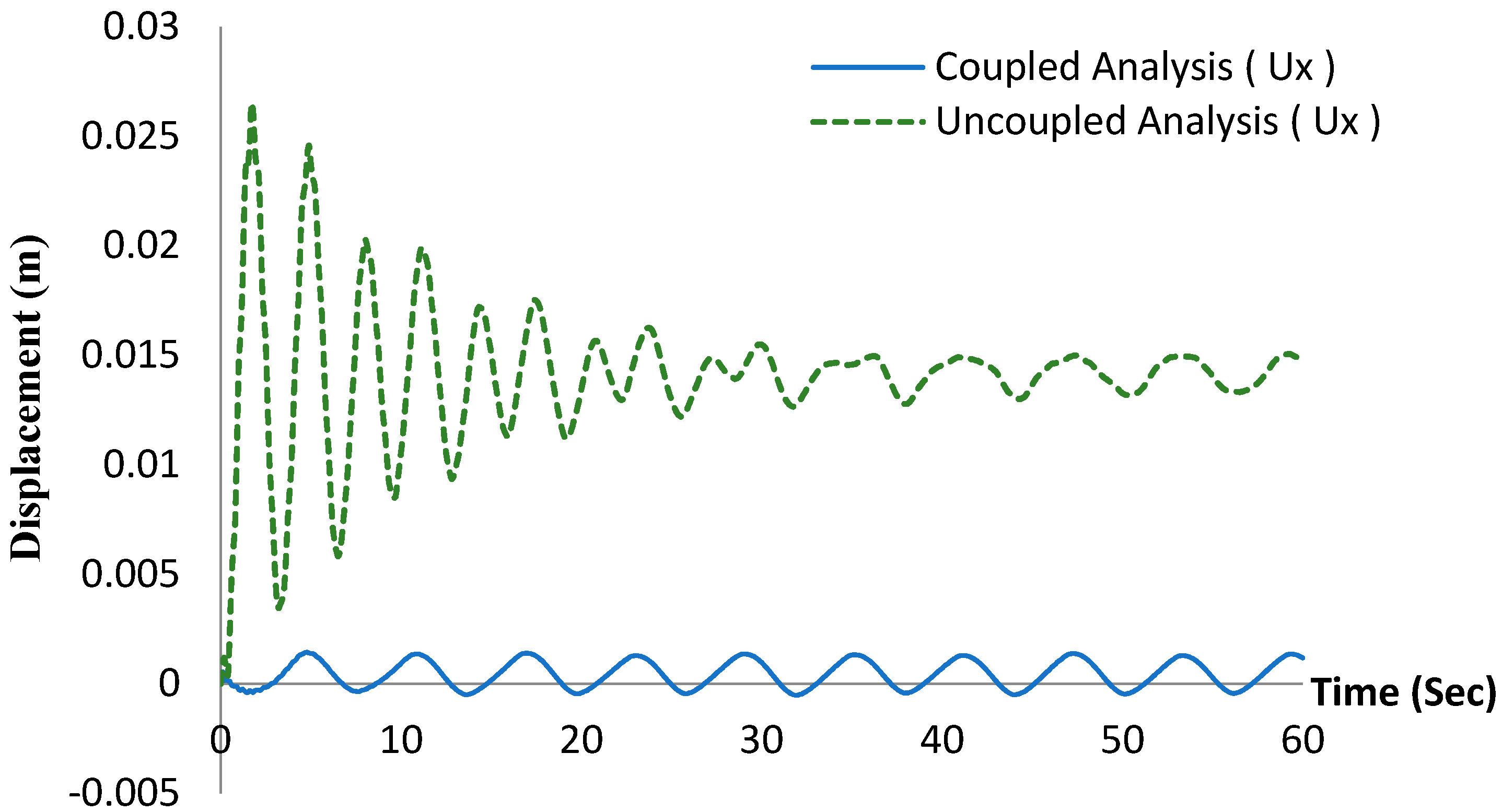
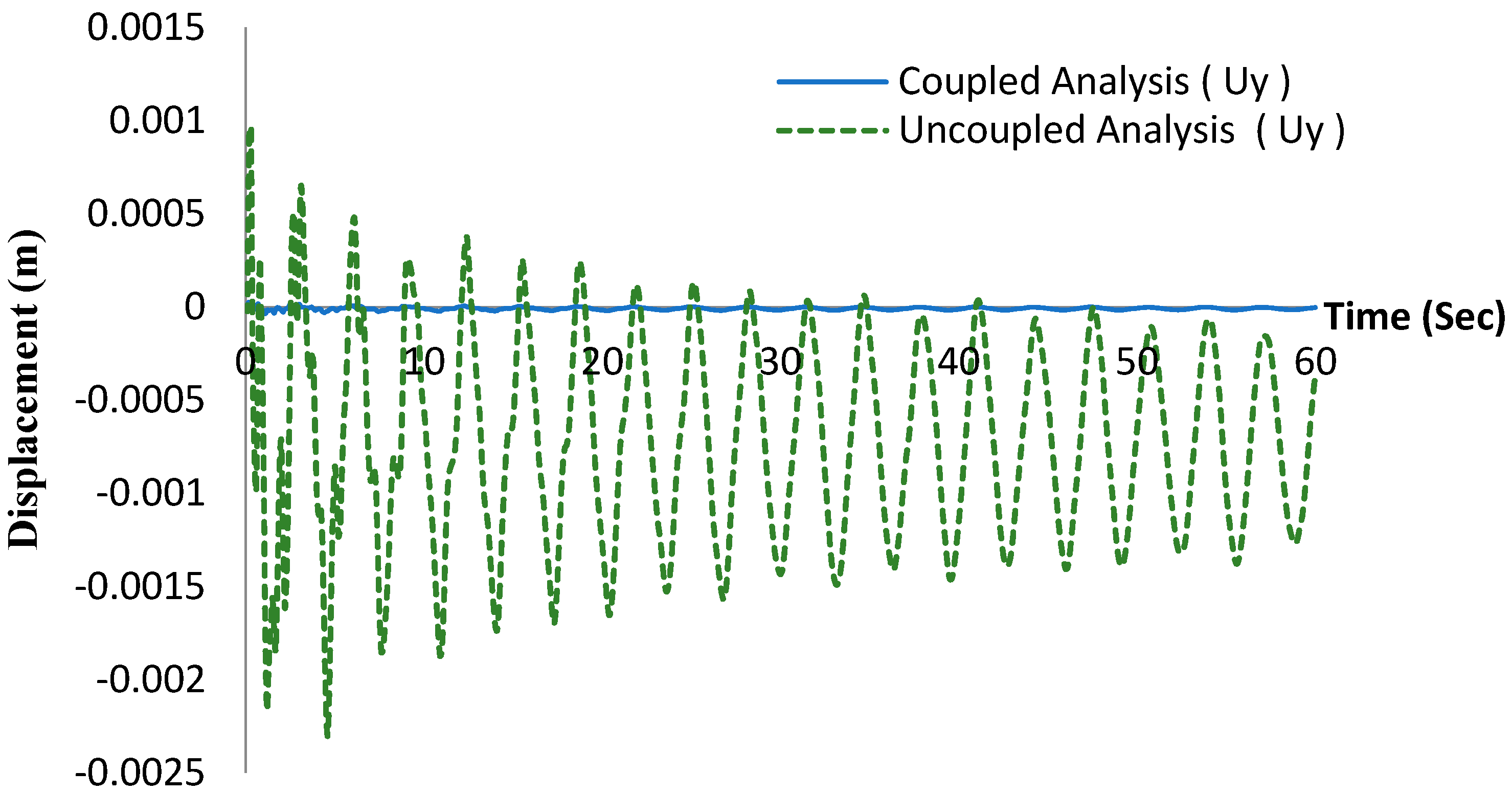
- The physical interaction between the tower and support structure has been included in the coupled models as additional coupling stiffness, which results in considerably smaller responses compared to the uncoupled models. This demonstrates that the coupled model should be used in the analysis and design of offshore wind turbine structures.
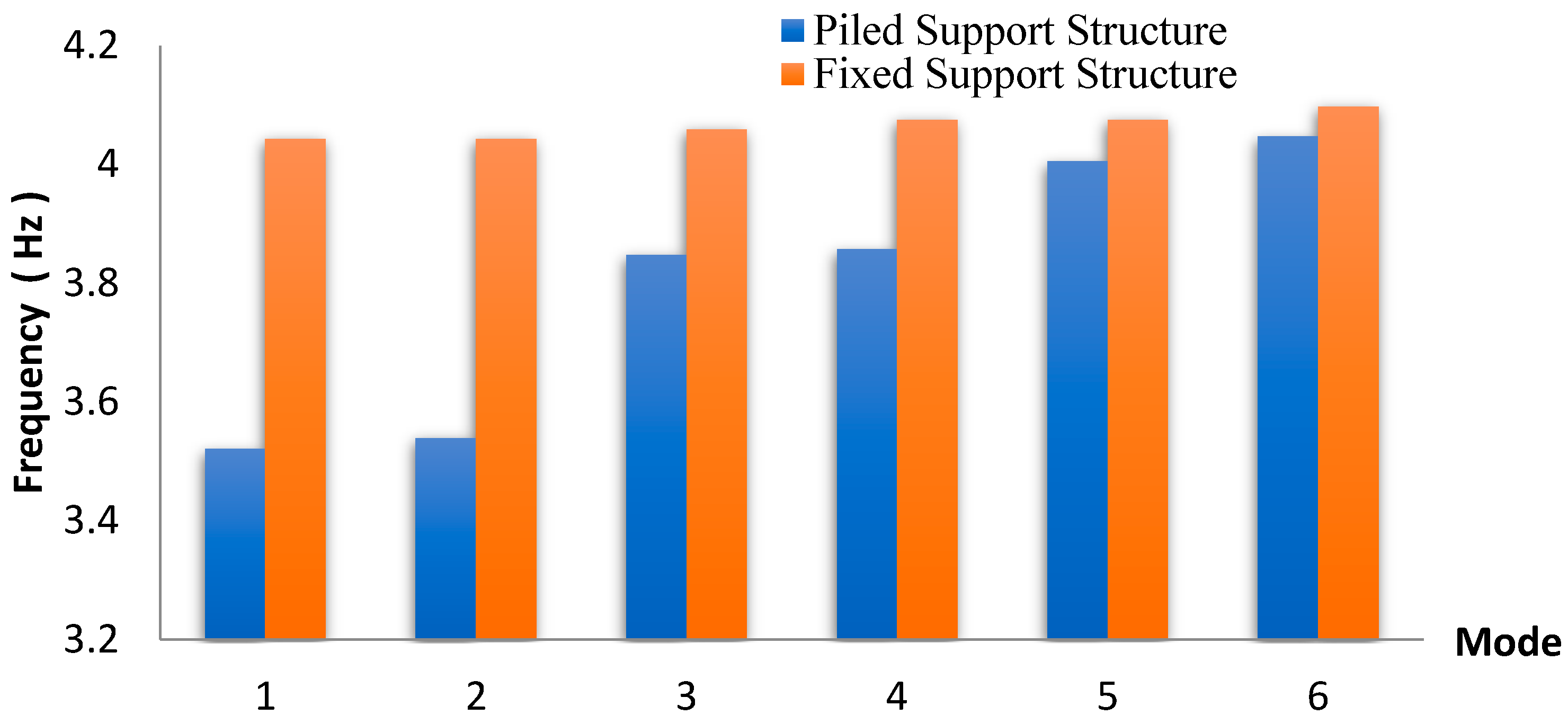
- For the piled-support tripod structures, the first to third modes are global whereas the fourth to sixth mode shapes are at a local member connected to the pile head. Their natural frequencies are considerably larger than those of the fixed support model as the physical interactions and infinite stiffness of the supporting pile-soil have been accounted for. This demonstrates the higher accuracy and validity of the piled-support structure model.
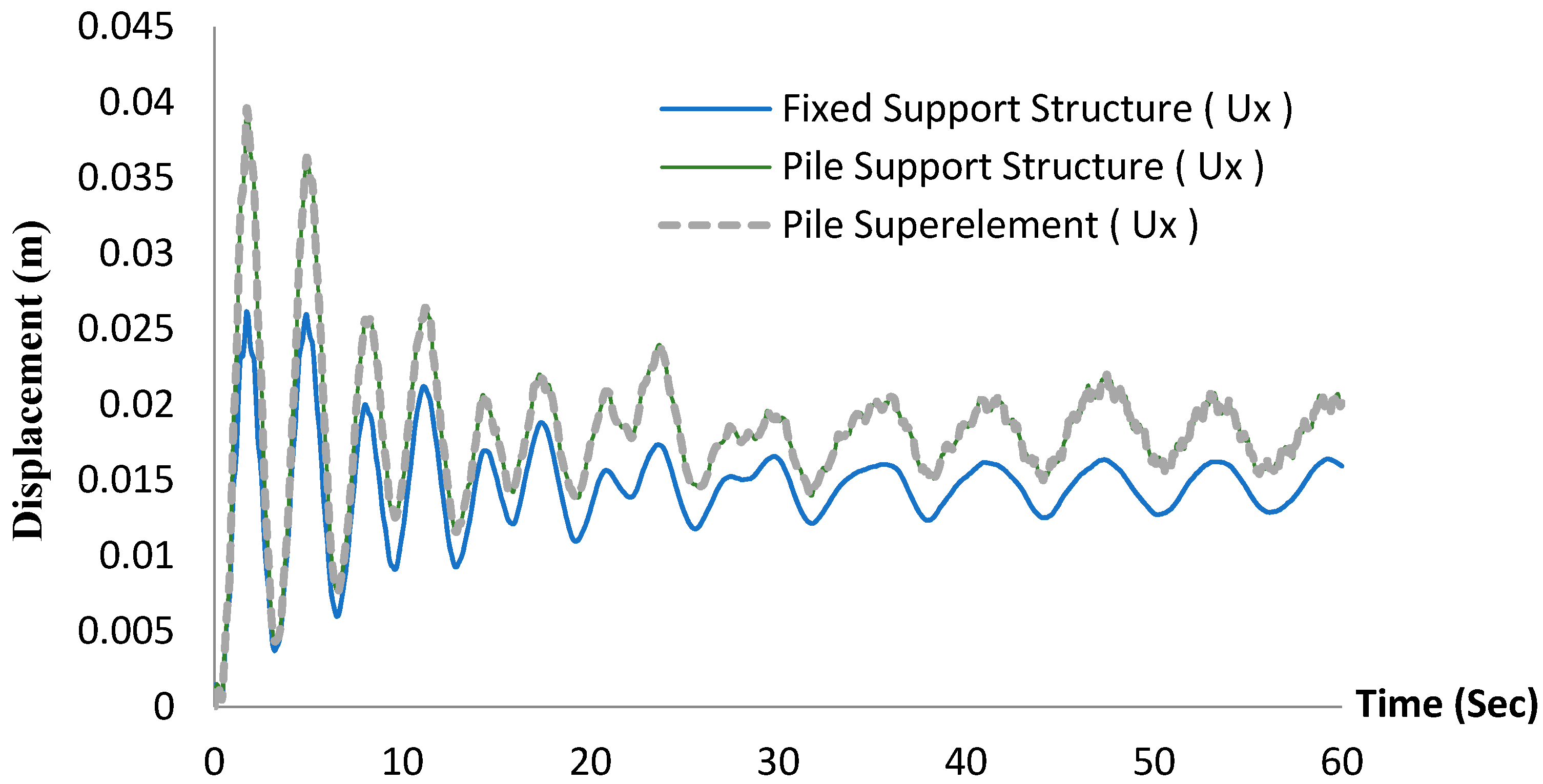
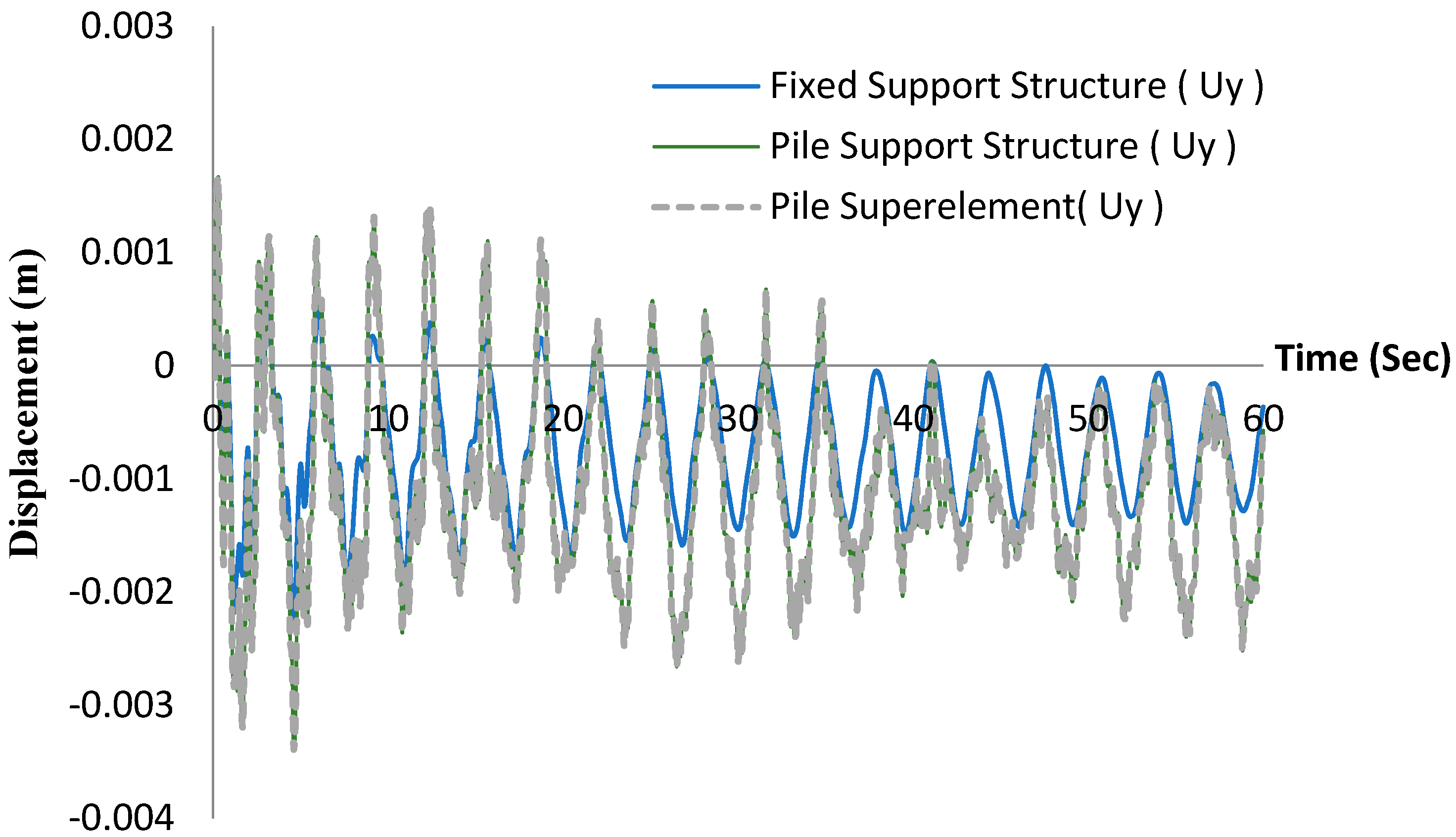
- The piled-support model produces larger responses than the fixed support model but is identical to the pile superelement model. Besides the physical factors, the simulation of OWT structures is significantly influenced by the chosen model, because it needs condensed stiffness information for the foundation base.
Author Contributions
Funding
Conflicts of Interest
References
- Esteban, M.D.; López-Gutiérrez, J.-S.; Negro, V. Gravity-based foundations in the offshore sector. J. Mar. Sci. Eng. 2019, 7, 64. [Google Scholar] [CrossRef]
- Oh, K.-Y.; Nam, W.-C.; Ryu, M.-S.; Kim, J.-Y.; Epureanud, B.I. A review of foundations of offshore wind energy convertors: Current status and future perspectives. Renew. Sustain. Energy Rev. 2018, 88, 16–36. [Google Scholar] [CrossRef]
- Ryu, M.S.; Kim, J.-Y.; Lee, J.-S. Comparison of two meteorological tower foundations for offshore wind turbines. In Proceedings of the Twenty-Sixth International Offshore and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016. [Google Scholar]
- Kim, S.-R.; Hung, L.C.; Oh, M. Group effect on bearing capacities of tripod bucket foundations in undrained clay. Ocean Eng. 2014, 79, 1–9. [Google Scholar] [CrossRef]
- Schaumann, P.; Böker, C. Can jackets and tripods compete with monopiles? In Proceedings of the Copenhagen Offshore Wind, Copenhagen, Denmark, 6–28 October 2005. [Google Scholar]
- Zaaijer, M.B. Comparison of Monopile, Tripod, Suction Bucket and Gravity Base Design for a 6 MW Turbine; Delft University of Technology: Delft, The Netherlands, 2003. [Google Scholar]
- Ryu, M.S.; Kim, J.-Y.; Kang, K.-S. The first met-mast for offshore wind farm in Korea and its remote sensing system. In Proceedings of the Twenty-First International Offshore and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Chen, D.; Huang, K.; Bretel, V.; Hou, L. Comparison of structural properties between monopile and tripod offshore wind-turbine support structures. Adv. Mech. Eng. 2013, 5, 1–9. [Google Scholar] [CrossRef]
- Hung, L.C.; Kim, S.-R. Evaluation of combined horizontal-moment bearing capacities of tripod bucket foundations in undrained clay. Ocean Eng. 2014, 85, 100–109. [Google Scholar] [CrossRef]
- Tran, N.X.; Hung, L.C.; Kim, S.-R. Evaluation of horizontal and moment bearing capacities of tripod bucket foundations in sand. Ocean Eng. 2017, 140, 209–221. [Google Scholar] [CrossRef]
- Yang, H.; Zhu, Y.; Lu, Q.; Zhang, J. Dynamic reliability based design optimization of the tripod sub-structure of offshore wind turbines. Renew. Energy 2015, 78, 16–25. [Google Scholar] [CrossRef]
- Margariti, G.; Papadopoulos, A.; Barmpas, D.; Gantes, C.J.; Gkologiannis, C.P. Design of monopile and tripod foundation of fixed offshore wind turbines via advanced numerical analysis. In Proceedings of the 8th GRACM International Congress on Computational Mechanics, Volos, Greece, 2–15 July 2015. [Google Scholar]
- Hübler, C.; Hafele, J.; Gebhardt, C.G.; Rolfes, R. Experimentally supported consideration of operating point dependent soil properties in coupled dynamics of offshore wind turbines. Mar. Struct. 2018, 57, 18–37. [Google Scholar] [CrossRef]
- Häfele, J.; Hübler, C.; Gebhardt, C.G.; Rolfes, R. An improved two-step soil-structure interaction modeling method for dynamical analyses of offshore wind turbines. Appl. Ocean Res. 2016, 55, 141–150. [Google Scholar] [CrossRef]
- Dinh, V.N.; McKeogh, E. Offshore Wind Energy: Technology Opportunities and Challenges. In Lecture Notes in Civil Engineering, Proceedings of the Vietnam Symposium on Advances in Offshore Engineering, Hanoi, Vietnam, 25 September 2018; Springer: Singapore, 2018. [Google Scholar] [CrossRef]
- Ong, M.C.; Bachynski, E.E.; Økland, O.D.; Passano, E. Dynamic responses of a jacket-type offshore wind turbine using decoupled and coupled models. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering (OMAE), San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Voormeeren, S.N.; van der Valk, P.L.C.; Nortier, B.P.; Molenaar, D.-P.; Rixen, D.J. Accurate and efficient modeling of complex offshore wind turbine support structures using augmented superelements. Wind Energy 2014, 17, 1035–1054. [Google Scholar] [CrossRef]
- Kim, K.D.; Plodpradit, P.; Manovachirasan, A.; Sinsabvarodom, C.; Kim, B.J. Analysis of offshore structures for wind turbines and oil and gas using X-SEA software. In Proceedings of the 11th World Congress on Computational Mechanics (WCCM XI), 5th European Conference on Computational Mechanics (ECCM V), 6th European Conference on Computational Fluid Dynamics (ECFD VI), Barcelona, Spain, 20–25 July 2014. [Google Scholar]
- Kim, K.-D.; Vachirapanyaku, S.; Plodpradit, P.; Dinh, V.-N.; Park, J.-H. Development of offshore structural analysis software X-SEA coupled with FAST. In Proceedings of the 38th International Conference on Ocean, Offshore & Artic Engineering, ASME 2019 OMAE 2019-96778, Glasgow, Scotland, UK, 9–14 June 2019. [Google Scholar]
- Jonkman, J. FAST v8. National Renewable Energy Laboratory (NREL). USA, 2018. Available online: https://nwtc.nrel.gov/FAST8 (accessed on 19 September 2017).
- Plodpradit, P.; Dinh, V.-N.; Kim, K.-D. Coupled analysis of offshore wind turbine jacket structures with pile-soil-structure interaction using FAST v8 and X-SEA. Appl. Sci. 2019, 9, 1633. [Google Scholar] [CrossRef]
- Dinh, V.N.; Basu, B.; Brinkgreve, R.B.J. Wavelet-based evolutionary response of multi-span structures including wave-passage and site-response effects. J. Eng. Mech. 2014, 140, 8. [Google Scholar] [CrossRef]
- Failla, G.; Santangelo, F.; Foti, G.; Scali, F.; Arena, F. Response-spectrum uncoupled analyses for seismic assessment of offshore wind turbines. J. Mar. Sci. Eng. 2018, 6, 85. [Google Scholar] [CrossRef]
- Basu, B.; Staino, A.; Dinh, V.N. Vibration of wind turbines under seismic excitations. In Proceedings of the 5th Asian-Pacific Symposium on Structural Reliability and its Applications, Singapore, 23–25 May 2012. [Google Scholar] [CrossRef]
- Fitzgerald, B.; Basu, B. A monitoring system for wind turbines subjected to combined seismic and turbulent aerodynamic loads. Struct. Monit. Maint. 2017, 4, 175–194. [Google Scholar] [CrossRef]
- Kim, K.-D. X-SEA User Manual; Konkuk University: Seoul, Korea, 2016. [Google Scholar]
- Kim, K.D.; Suthasupradit, S.; Kim, Y.H.; Lomboy, G.R.; Dinh, V.N. New development of XFINAS software for nonlinear dynamic and seismic analysis of structure. In Proceedings of the Third Asian-Pacific Congress on Computational Mechanics (APCOM’07) & the Eleventh International Conference on the Enhancement and Promotion of Computational Methods in Engineering and Science (EPMESC XI), Kyoto, Japan, 3–6 December 2007. [Google Scholar]
- Kim, B.J.; Plodpradit, P.; Kim, K.D.; Kim, H.G. Three-dimensional analysis of prestressed concrete offshore wind turbine structure under environmental and 5-MW turbine loads. J. Mar. Sci. Appl. 2018, 17, 625–637. [Google Scholar] [CrossRef]
- Dinh, V.N.; Basu, B.; Nielsen, S.R.K. Impact of spar-nacelle-blade coupling on the edgewise response of floating offshore wind turbines. Coupled Syst. Mech. 2013, 2. [Google Scholar] [CrossRef]
- Damiani, R.; Jonkman, J.; Hayman, G. SubDyn User’s Guide and Theory Manual; National Renewable Energy Laboratory (NREL): Golden, CO, USA, March 2015. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Outer diameter of diagonal brace (m) | 2.475–1.200 |
| Wall thickness of diagonal brace (m) | 0.035–0.025 |
| Outer diameter of main tubular (m) | 5.412–1.875 |
| Wall thickness of main tubular (m) | 0.05–0.035 |
| Young’s Modulus (N/m2) | 2.1 × 1011 |
| Density (kg/m3) | 7850 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Plodpradit, P.; Dinh, V.N.; Kim, K.-D. Tripod-Supported Offshore Wind Turbines: Modal and Coupled Analysis and a Parametric Study Using X-SEA and FAST. J. Mar. Sci. Eng. 2019, 7, 181. https://doi.org/10.3390/jmse7060181
Plodpradit P, Dinh VN, Kim K-D. Tripod-Supported Offshore Wind Turbines: Modal and Coupled Analysis and a Parametric Study Using X-SEA and FAST. Journal of Marine Science and Engineering. 2019; 7(6):181. https://doi.org/10.3390/jmse7060181
Chicago/Turabian StylePlodpradit, Pasin, Van Nguyen Dinh, and Ki-Du Kim. 2019. "Tripod-Supported Offshore Wind Turbines: Modal and Coupled Analysis and a Parametric Study Using X-SEA and FAST" Journal of Marine Science and Engineering 7, no. 6: 181. https://doi.org/10.3390/jmse7060181