1. Introduction
One of the challenges in wave energy harvesting is the motion control. There has been significant developments for different control methods for WECs [
1]. Most studies on the control of one-degree-of-freedom heaving WECs adopt a linear dynamic model—the Cummins’ equation [
2]—which can be written as:
where
z is the heave displacement,
m is the buoy mass,
k is the hydrostatic stiffness due to buoyancy,
is the added mass,
is the excitation force,
u is the control force,
is a viscous damping coefficient, and
is the radiation impulse response function (radiation kernel). The radiation term is called radiation force,
, and the buoyancy stiffness term is called the hydrostatic force.
There are multiple sources of possible nonlinearities in the WEC dynamic model though [
3,
4,
5]. For example, if the buoy shape is not a vertical cylinder near the water surface, then the hydrostatic force will be nonlinear. The hydrodynamic forces can also be nonlinear in the case of large motion [
6]. Control strategies that aim at maximizing the harvested energy usually increase the motion amplitude and, hence, increase the impact of these nonlinearities. The work in [
6] presented a numerical implementation for nonlinear hydrodynamic forces at different levels from a full nonlinear model using Computational Fluid Dynamics (CFD) tools, linear models corrected by nonlinear Froude–Krylov force, as well as nonlinear viscous and hydrostatic forces. The Power Take Off (PTO) unit may have nonlinearities, as well [
7]. The work in [
8] points out that different WEC systems should choose only the relevant nonlinear effects to avoid unnecessary computational costs. For example, in the case of heaving point absorbers, the nonlinear Froude–Krylov force is essential, while the nonlinear diffraction and radiation can be neglected. The nonlinear viscous effects are weak as well for point absorbers [
8], and the nonlinear PTO and mooring effects seem to be significant.
2. Linear WEC System
Consider a cylindrical buoy of radius
r and height
h in a regular wave, and assume that the buoy motion is small. The radiation damping force reduces to a linear damping for the case of a regular wave. The equation of motion in Equation (
1) then becomes:
where
c is the radiation damping coefficient. The harvested power is expressed as:
For the system described above, the kinetic energy and potential energy functions can be written as:
where
is the conservative forces. Although the added mass is not an actual mass, since it represents a force that contributes to the energy balance and this force is always
, it can be included in computing
T. Note that if the control force is two parts
, where
is a conservative force (e.g., a stiffness term) and
is a non-conservative force (e.g., a damping term), then
can be included in the potential function
V. To add that effect, assume that the potential of
is
. Hence:
The Hamiltonian function for the system is calculated as:
The Hamiltonian represents the stored energy, and the time derivative of the Hamiltonian is a power flow. The time derivative of Equation (
7) can be written as:
Using Equations (
2) and (
8), we can write:
The product
represents the power flow into the actuator, the PTO, as can be seen from Equation (
3). Moreover, since the WEC is moving, the power flow is the summation of two parts: a conservative part
and a non-conservative part
.
Hence, by substituting Equation (
11) into Equation (
10), we can write:
A system is said to be conservative if
[
9], which means the stored energy does not change over time. In other words, the power flow into the system balances the power flow out of the system at all times [
10]. One would choose to have the WEC system behave like a conservative system, since in this case, the power flow from the wave into the WEC will go into the PTO (neglecting the power that gets dissipated in other forms such as hydrodynamic damping and structural dynamics). Note that in the case that
and the system accumulates energy, it becomes unstable. By examining Equation (
12) and recalling that
, it can be seen that for this WEC system to behave like a conservative system, the non-conservative part of the control (e.g., damping terms in
u) must balance the summation of radiation damping force (
), the excitation force, and the viscous damping force (
), at all times. In such a case, the WEC will move in a perfect sinusoidal motion, as can be seen from Equation (
9). Note that in this case,
is due to a linear conservative force, which is a spring-type force, and hence, it changes the frequency of the sinusoidal motion. In fact,
adjusts the natural frequency of the system to the resonance frequency.
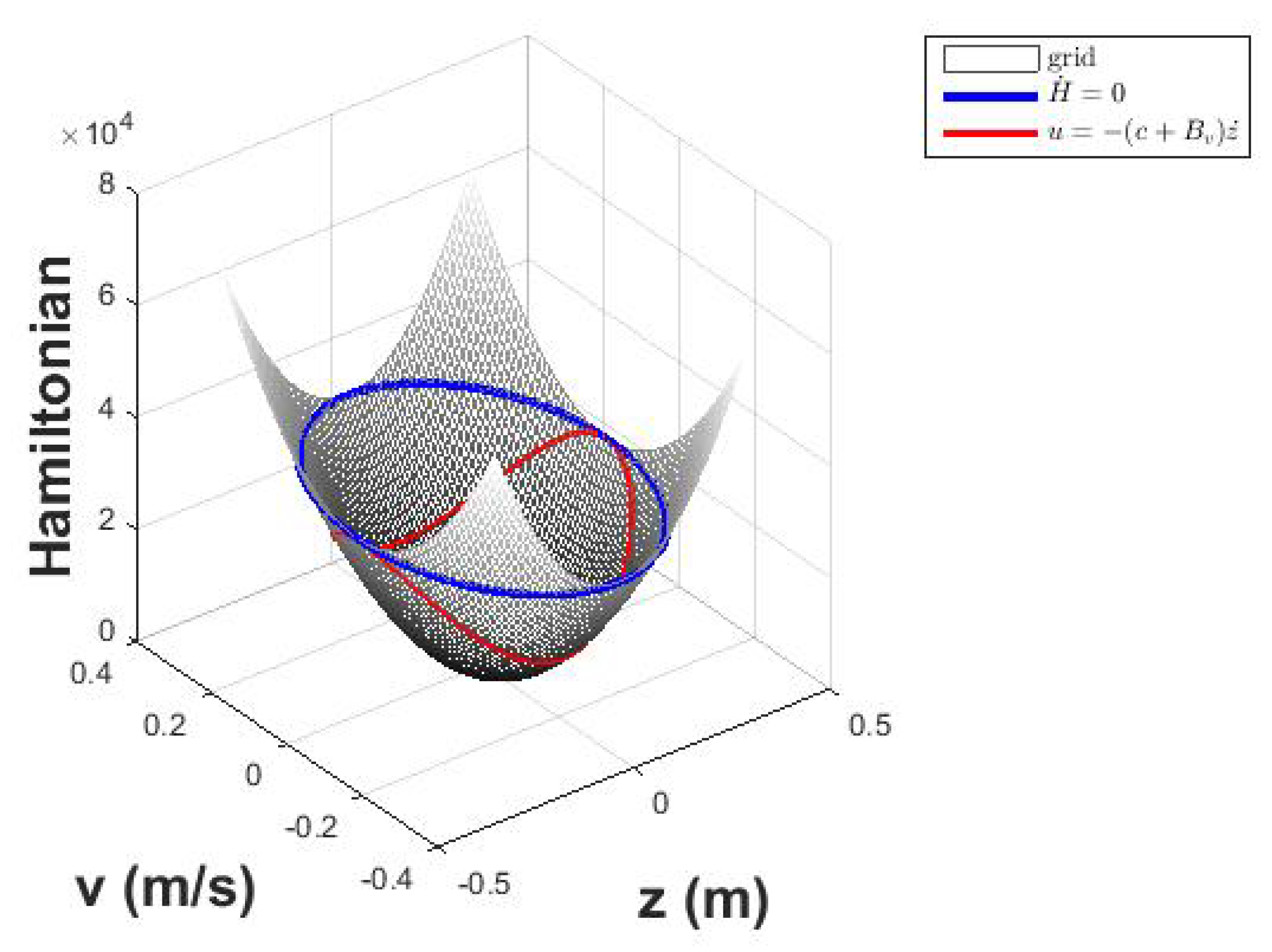
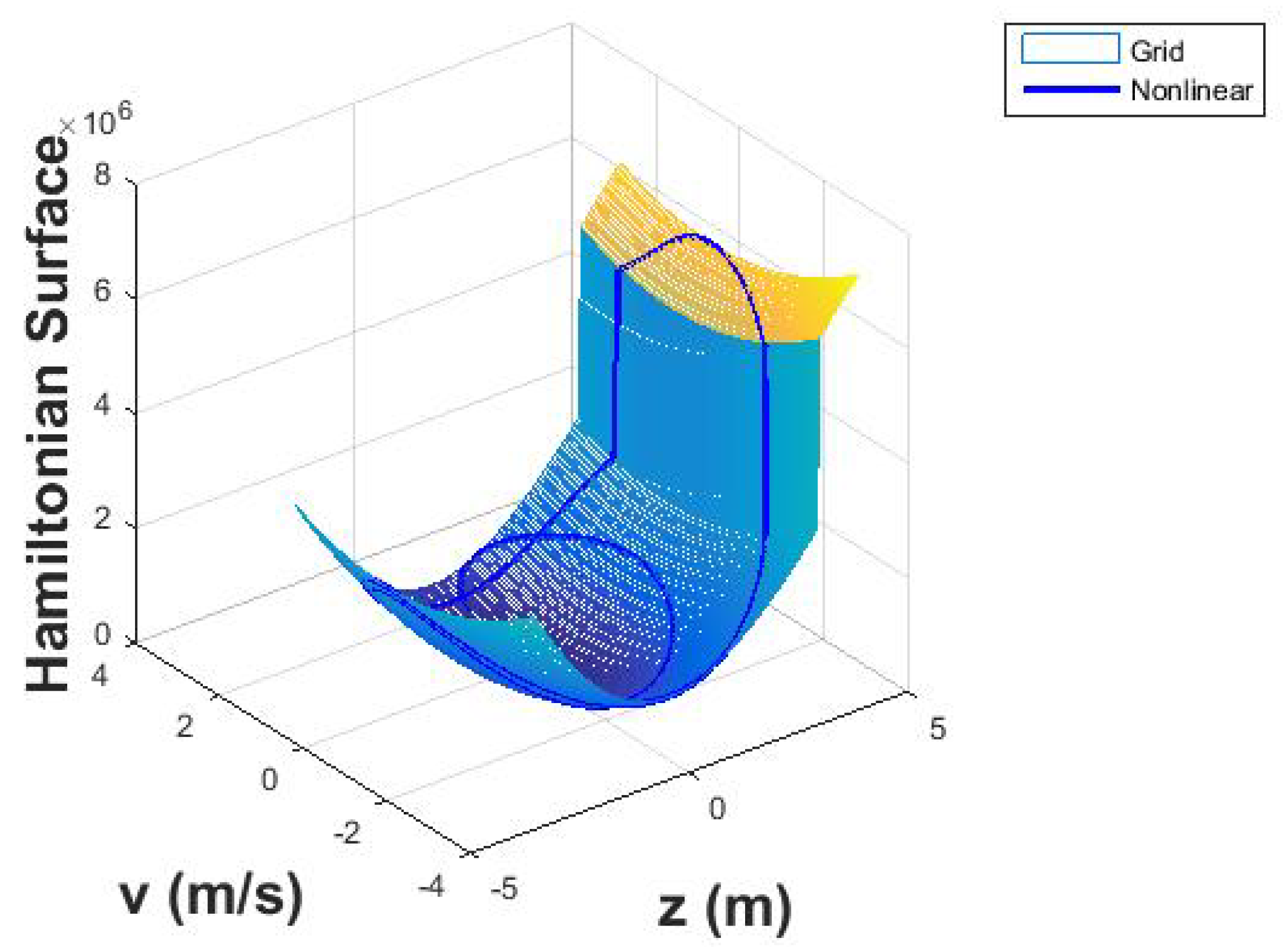
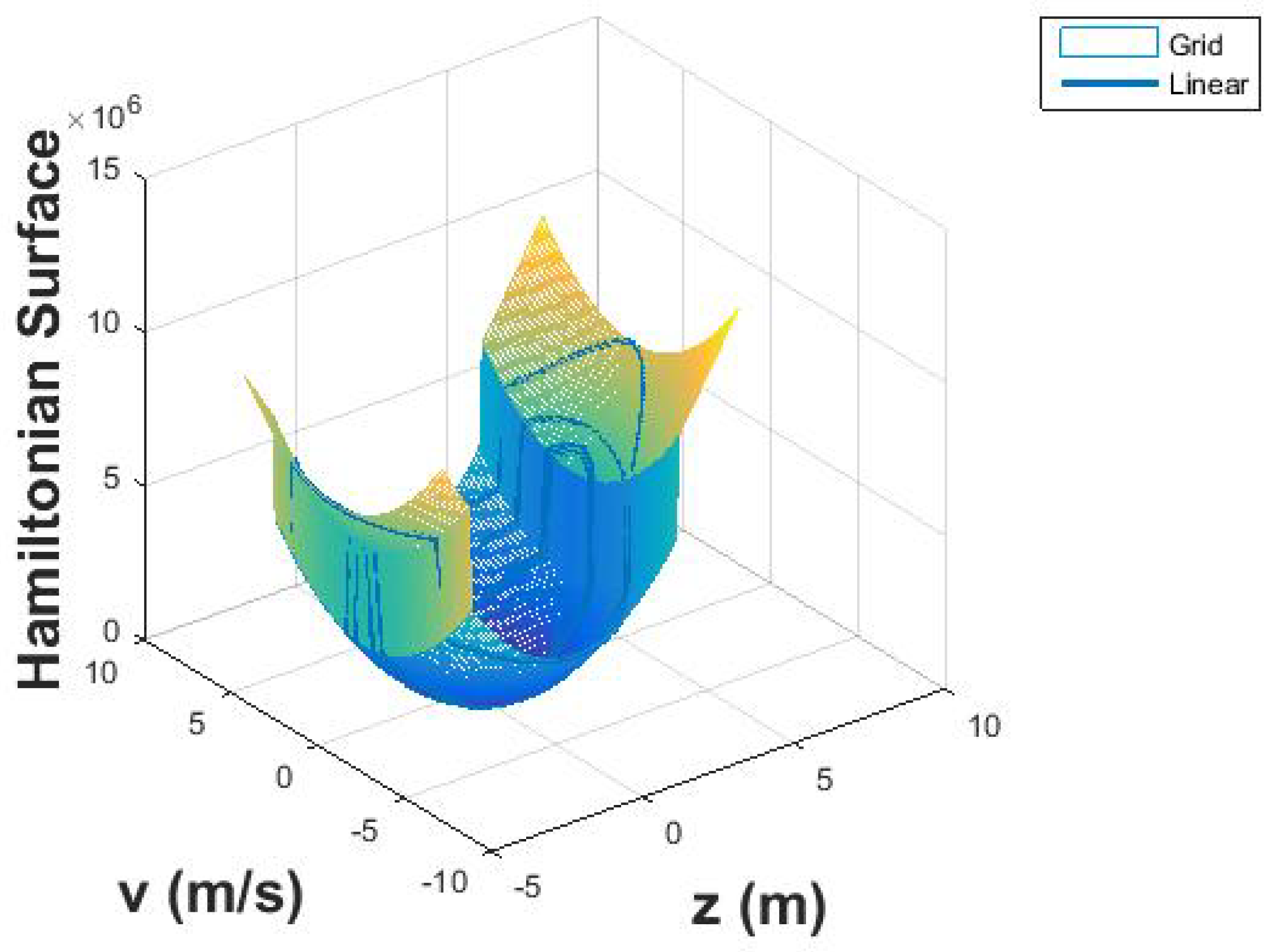
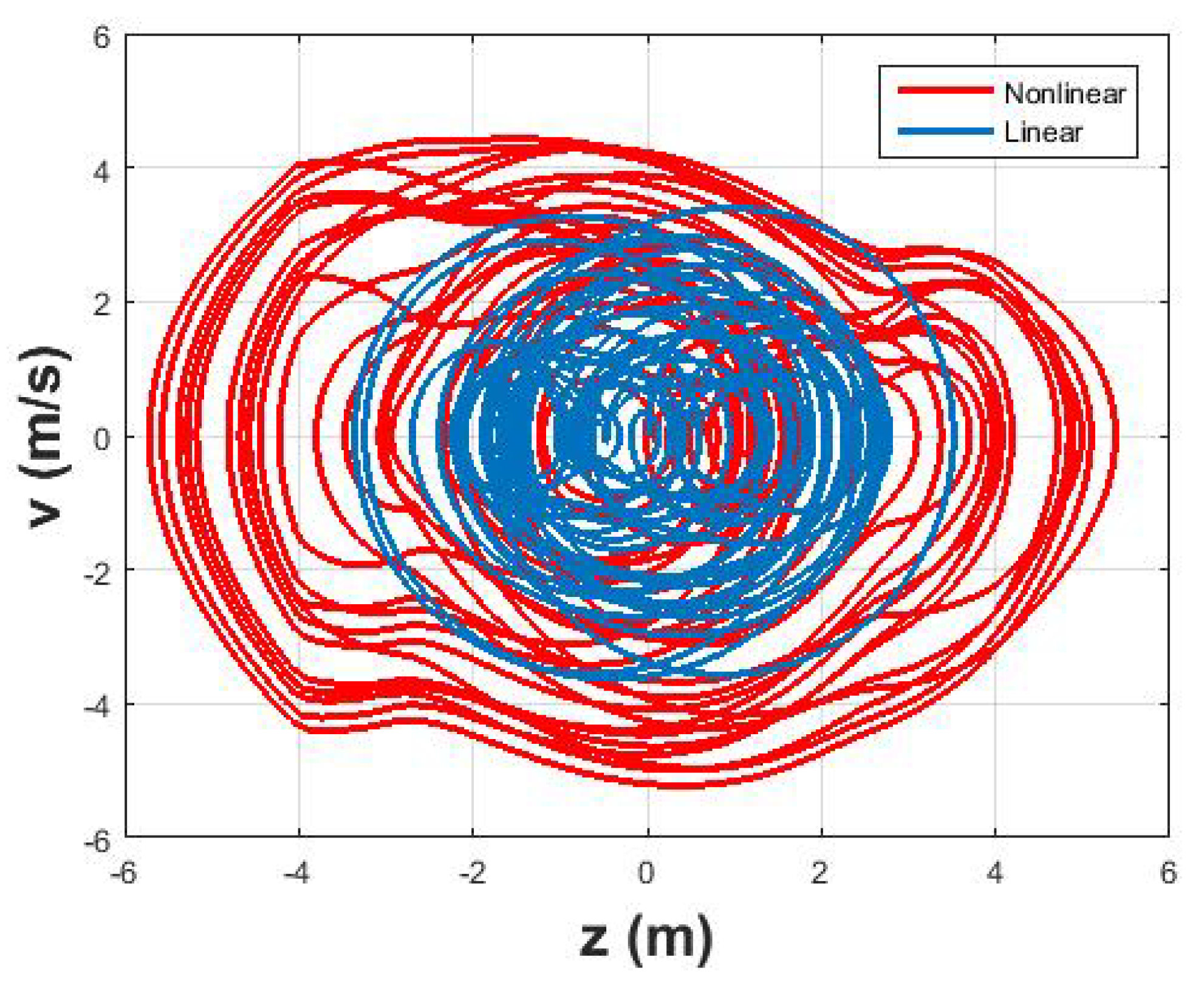
If we plot
H versus
z and
for the whole range of
z and
, we get the Hamiltonian surface, which is the locus for the states
z and
.
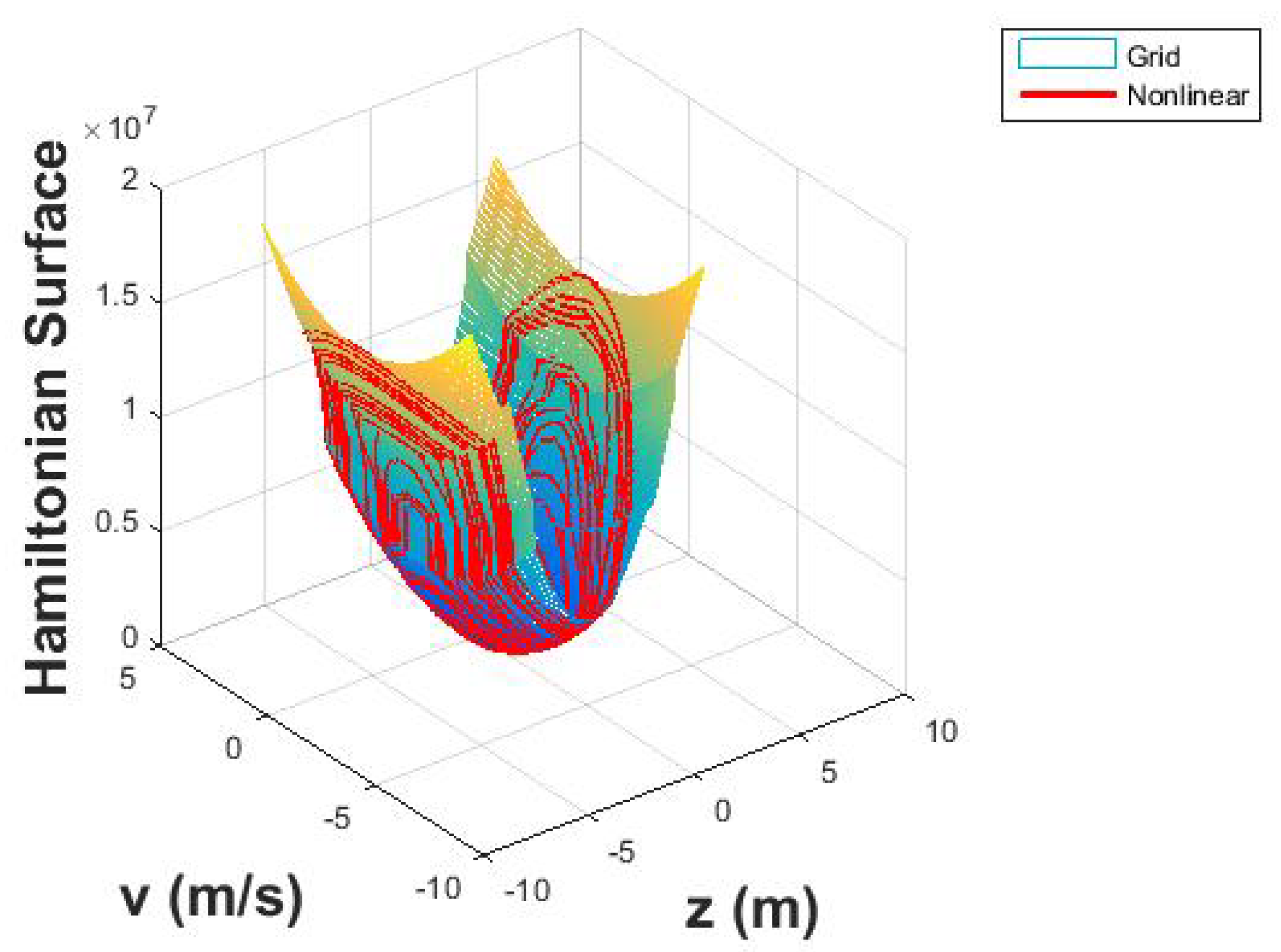
Figure 1 shows an example of a Hamiltonian surface. As the system is moving over time, the states
z and
will trace a trajectory on the Hamiltonian surface. In the case of a conservative system,
H is constant (
), which means that as the states change over time, the Hamiltonian value traces a closed trajectory (cycle) that is parallel to the
plane on the Hamiltonian surface. The time needed for the system to travel a full closed cycle is called the period of the cycle
. Note that the value of
H on this cycle can be determined from the initial conditions of
z and
.
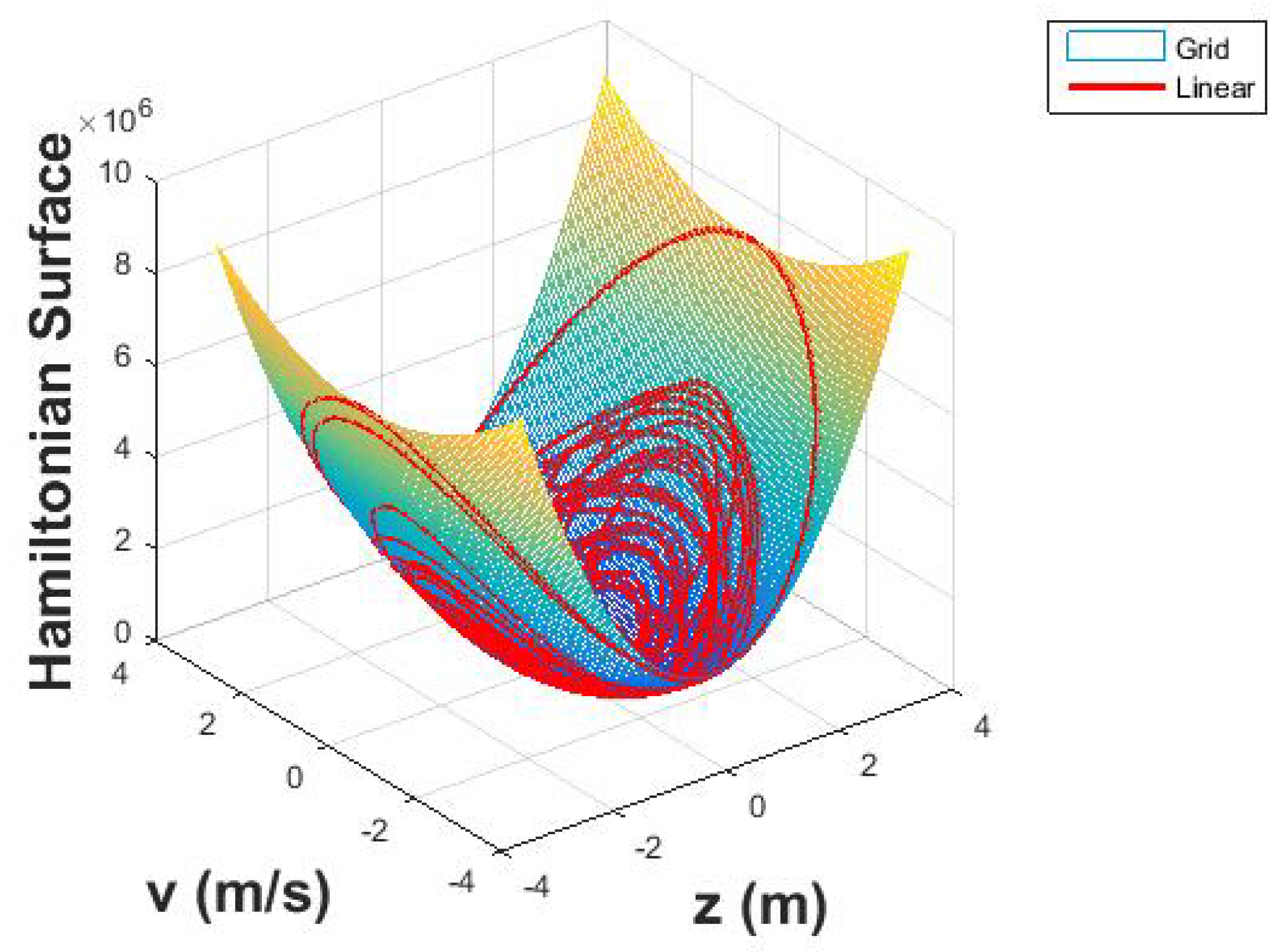
The works in [
10,
11] pointed out, however, that it is possible to integrate the power flow in Equation (
8) to compute the work per cycle:
Hence, it is possible to design a control system that will achieve
as opposed to
. This condition allows more flexibility for the control design; the cyclic trajectory of the WEC is not constrained to be parallel to the
plane in this case; as long as the system returns to its initial state after some
period of time. The two lines in
Figure 1 represent two different controls for the same WEC. The WEC has a cylindrical buoy of radius
m and a draft of
m, in a regular wave of
m in amplitude and a period of nine seconds. No viscous damping is assumed. The
line represents the case when the non-conservative part of the control
cancels the summation of the radiation damping and excitation forces (see Equation (
12)). The
trajectory represents a case where a damping control is used of the form
N. In other words, the difference between the two cases is due to the additional reactive power due to
. The initial states are assumed
m and
m/second. Clearly in this case, there is no power flow balance at each point in time. As a result, the
H value changes on the Hamiltonian surface along the trajectory and returns to its original value.
3. WEC in Large Motion
In the case of using nonlinear control, it is possible that the motion of the buoy grows large enough to make the buoy almost fully submerged or almost fully in the air. In such cases, the linear hydrodynamic model becomes invalid, and modeling of nonlinear hydrodynamics becomes inevitable. This is not the focus of this paper however. In this paper, we investigate the impact of having nonlinear terms in the equation of motion whether they appear due to nonlinear hydrodynamics, nonlinear hydrostatics, nonlinear damping, nonlinear control forces, or all of the above. Toward that end, the control force is here assumed in the form of a summation of two quantities:
where
is the linear part of the control and
is the nonlinear control part. The harvested power can be expressed as:
The nonlinear control part is assumed in the form:
where
and
are constant coefficients and
and
are the number of nonlinear terms that determine the order of control forces. The nonlinear control part
does not have to be of the form presented in Equation (
16); this form is selected as a case study in this paper.
The equation of motion of a WEC in large motion with nonlinear control takes the form:
where
m is the buoy mass in addition to the added mass at infinite frequency,
represents the radiation states,
is the radiation damping force, and
is the buoyancy force.
The equation of motion, Equation (
17), is derived assuming that the buoy does not leave the water, nor gets fully submerged in the water. In the case of nonlinear control presented in this paper, the motion of the buoy may grow large, and these two cases should not be excluded. Hence, the model in Equation (
17) is modified as follows. A range
is defined in which the model in Equation (
17) is considered valid. The limit
is selected based on the buoy dimensions and the wave height. When
, there are two possible cases. The first case is when
, that is when the buoy is (or very close to being) fully submerged under water. The second case is when
, that is when the buoy is (or very close to being) totally out of the water. In these two cases, the dynamic model in Equation (
17) is not valid, and an approximate dynamic model is defined as follows:
- Case 1 (z > 0):
The linear stiffness term becomes a constant . The excitation force is assumed to remain unchanged.
- Case 2 (z < 0):
The buoy is out of the water, so there is no buoyancy force on it, meaning that
, where
g is the gravitational acceleration. There is no excitation force acting on the WEC; and there is no linear damping term on the left-hand side of Equation (
17). The equation of motion reduces to
.
In this model, the radiation damping force
takes the form:
The buoyancy force
can be calculated as:
where
is the submerged volume and
is the total buoy volume. Please note that the slam force is not considered in this paper. Considering the approximate dynamic model (Cases 1 and 2) and Equations (
17)–(
19), the equation of motion in all the cases can be written in the state space form shown in Equation (
20).
where
G is defined as:
When
and
, the excitation force vanishes,
. The matrix
in Equation (
20) is defined as described in Equation (
22).
Recall that
. For the system described above, the potential energy in Equation (
6) can be expressed as follows:
Note that the
terms are not shown in this equation since they are independent of
z. The kinetic energy is computed as expressed in Equation (
4). By substituting in Equation (
7), the time derivative of the Hamiltonian can be written as:
Using Equations (
17) and (
24), in the case when
, we can write:
Similarly for the other two regions (
), we can write:
Using Equations (
24) and (
25), then the work per cycle can be computed as:
Also using Equations (
26)–(
28), the work per cycle can be computed as:
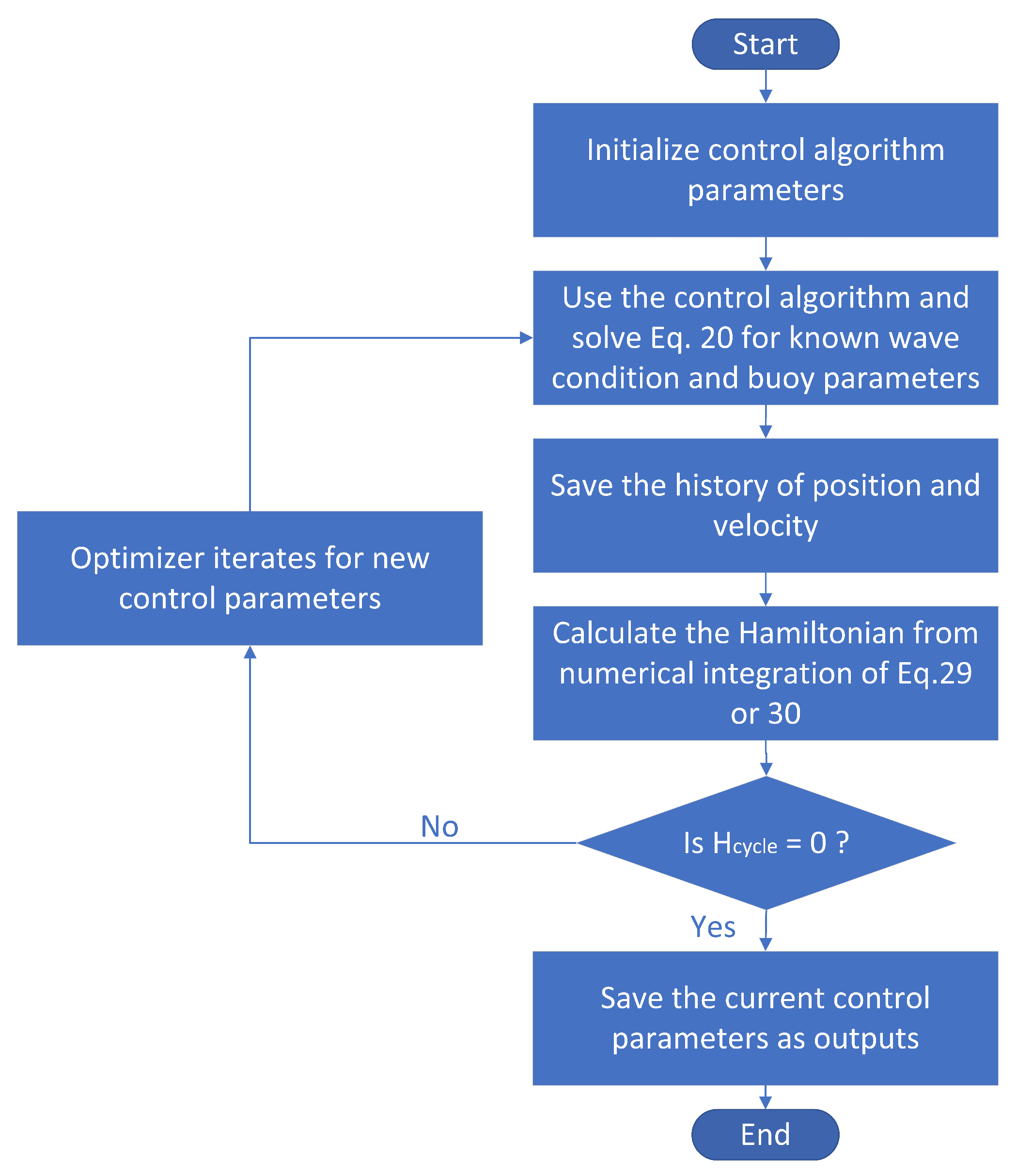
Equations (
29) and (
30) can be used for control design and for simulation of this nonlinear WEC system. Depending on the form that
has, the equation of motion can be selected such that
over some period
. This will guarantee stability of the control system design. The coefficients
should be selected such that
in Equation (
29) over the same period
. Using the selected values for
and
, the system can be simulated via numerical integration of Equations (
24) and (
26)–(
28), simultaneously. A conceptual diagram of this process is shown in
Figure 2.
Section 4 presents an illustrative case study.
4. Case Study 1: Prescribed Hamiltonian
As discussed in the previous sections, it is possible to design a controller that satisfies the requirement of
over some period
. This would be of interest in wave energy conversion especially in the case of regular waves since the wave repeats itself at a regular rate; and hence, it is intuitive that a control system that brings the WEC to some initial state at the same rate would be suitable. Consider a cylindrical buoy of radius
m and a draft of
m, in a regular wave of period
s. Assume that:
Next, the control coefficients
and
are chosen such that the selected Hamiltonian trajectory over time, Equation (
31), is achieved. To do that, we start by substituting for
from Equation (
31) into Equation (
24) to get:
Then, Equation (
32) can be solved for the control coefficients
,
, and
; this can be achieved by solving a least squares error to minimize
, for a given number of coefficients
. In this case, the optimizer iterates on different values for the coefficients
, where in each iteration, Equation (
32) is solved for
and
, and the objective function value
is computed for this iteration. Once obtained,
and
are substituted in Equations (
26)–(
28) to solve for the coefficients
. In fact, in this illustrative example, where we assumed a shape for the Hamiltonian given by Equation (
31), we do not need to solve for the coefficients
; rather, it is possible to set a variable
and solve for
in Equations (
26)–(
28) to get:
Finally, the power harvested by this buoy can be computed using Equation (
3), where
. One obtained solution for this case when
is:
,
,
,
.
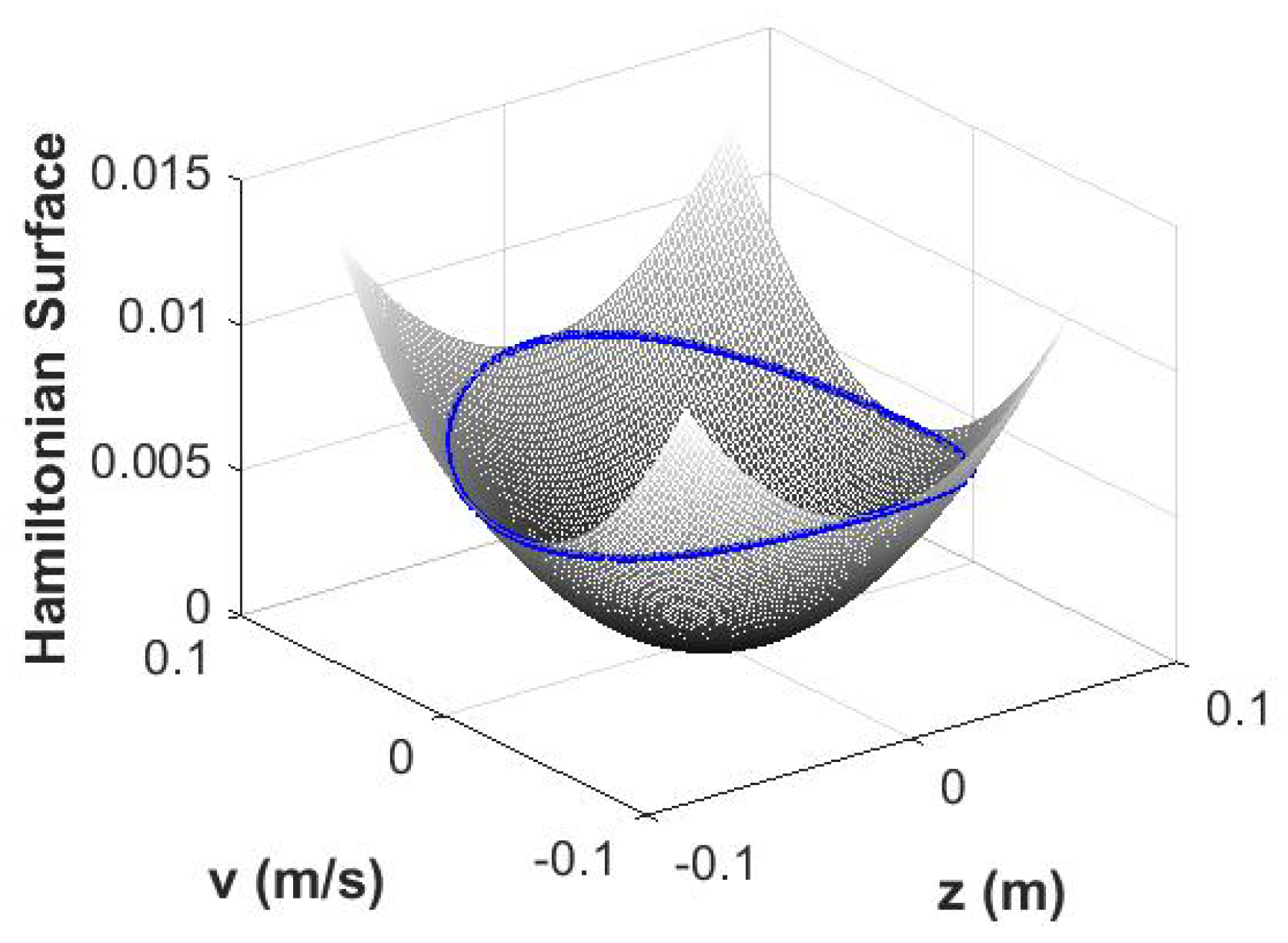
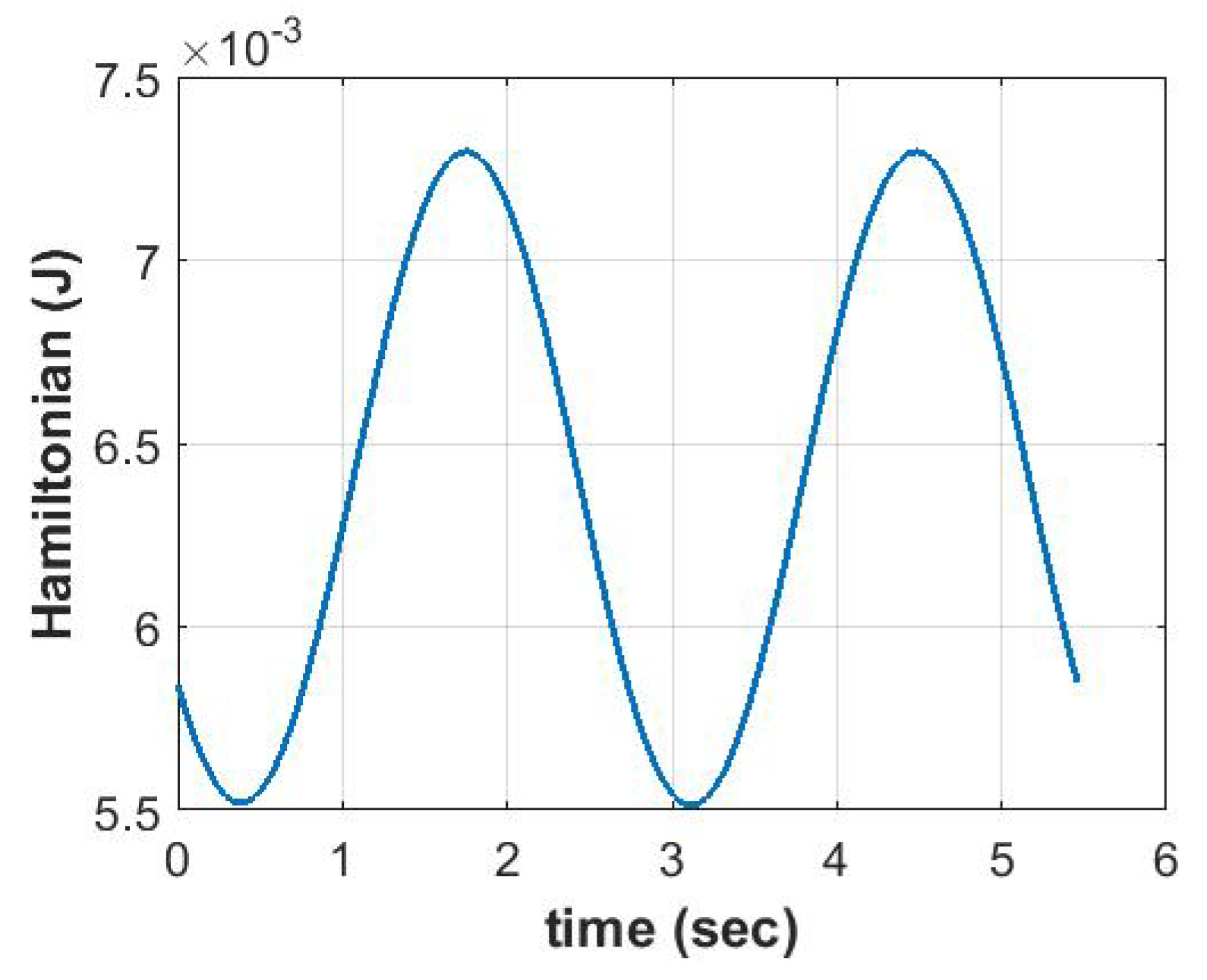
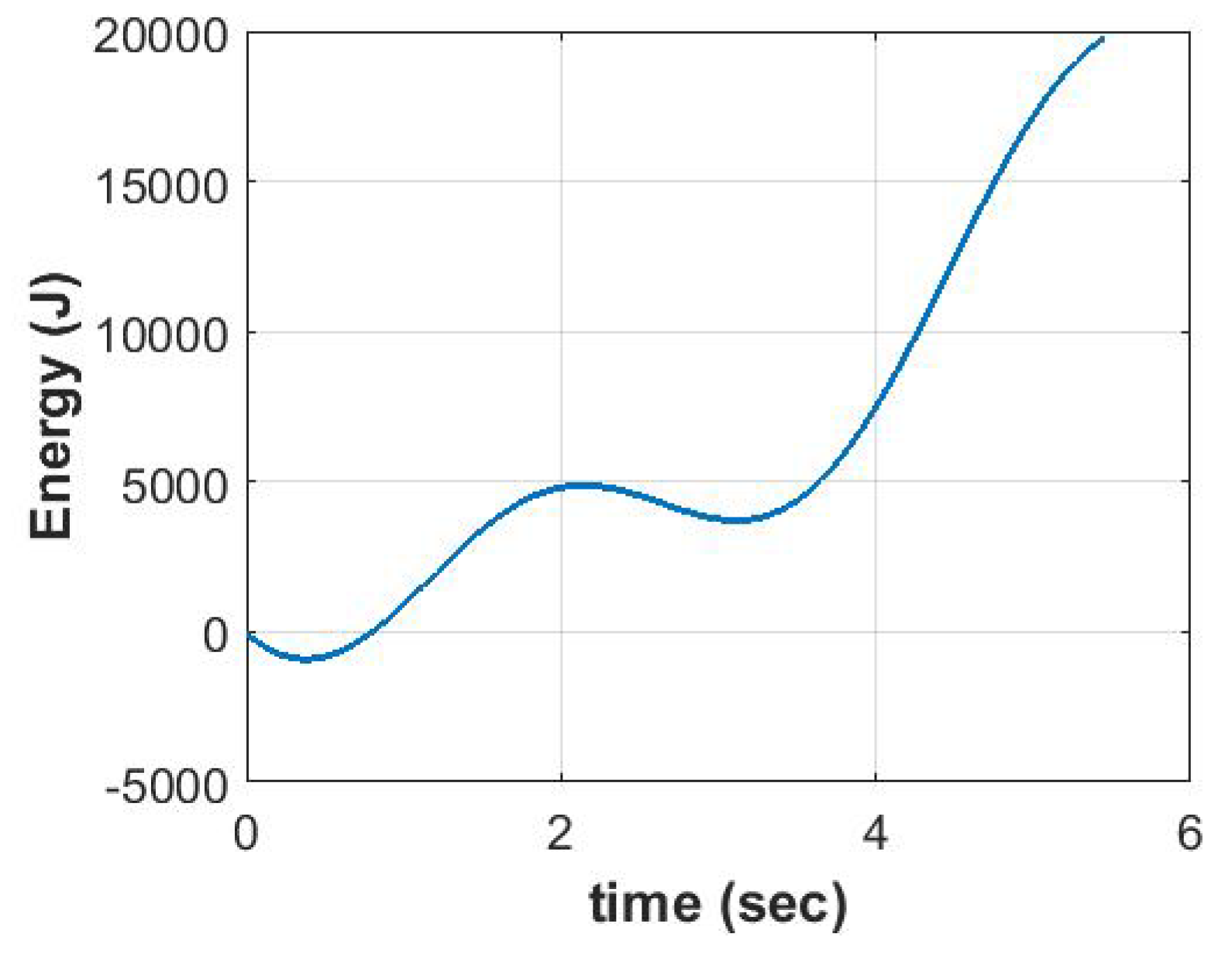
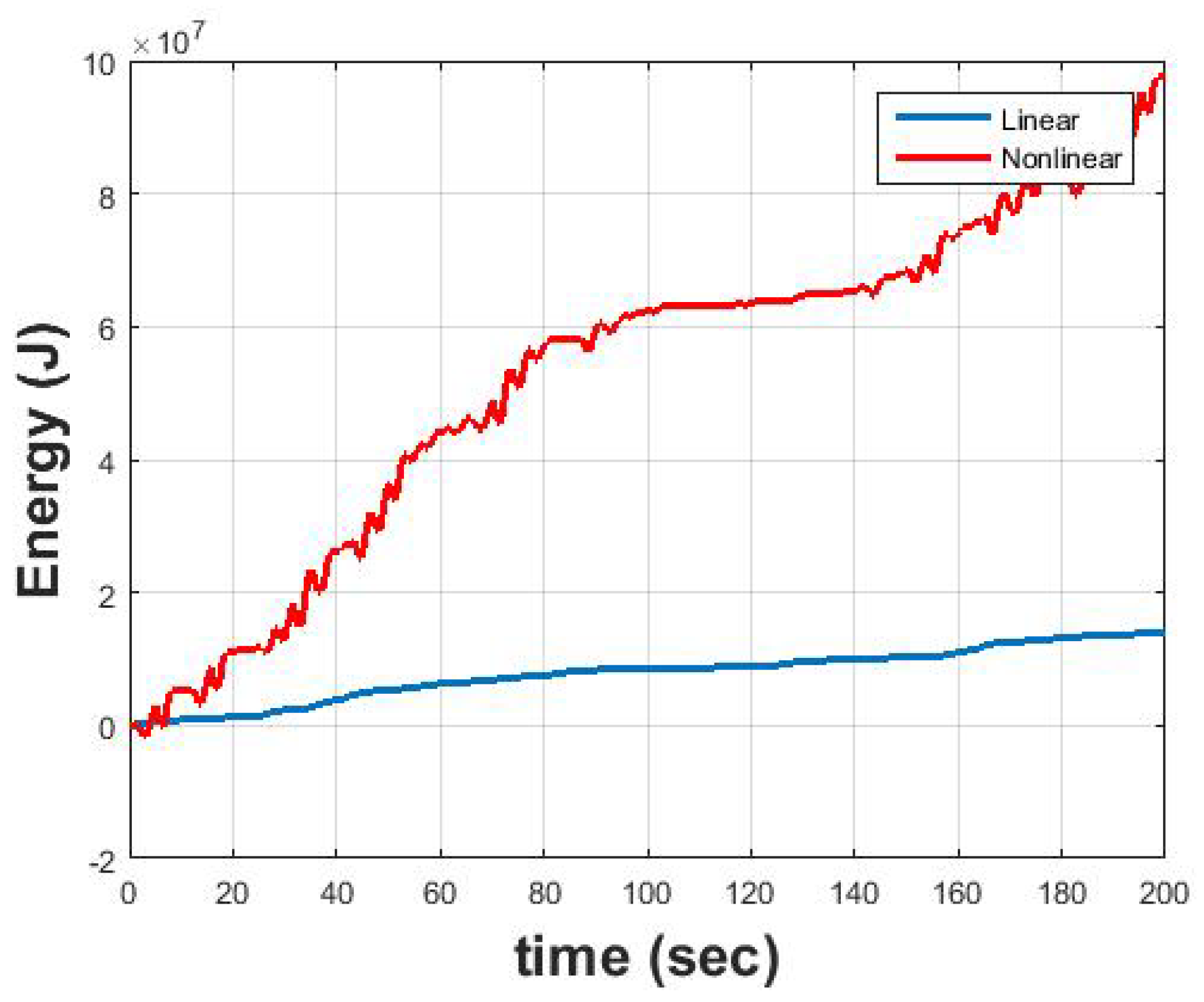
Figure 3 shows the Hamiltonian surface and the WEC trajectory over one cycle. The Hamiltonian changes over time and returns to its initial value after one cycle period, as shown in
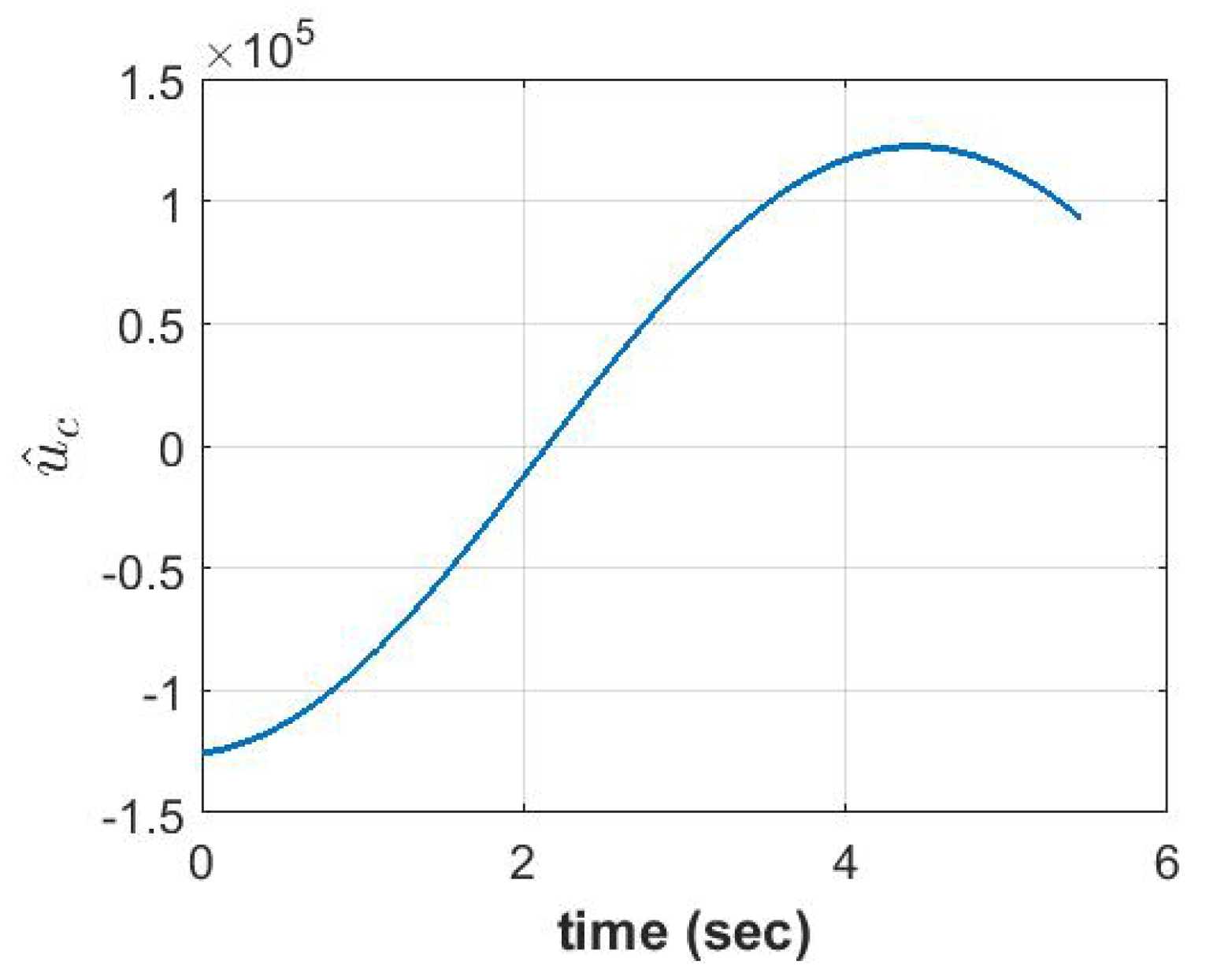
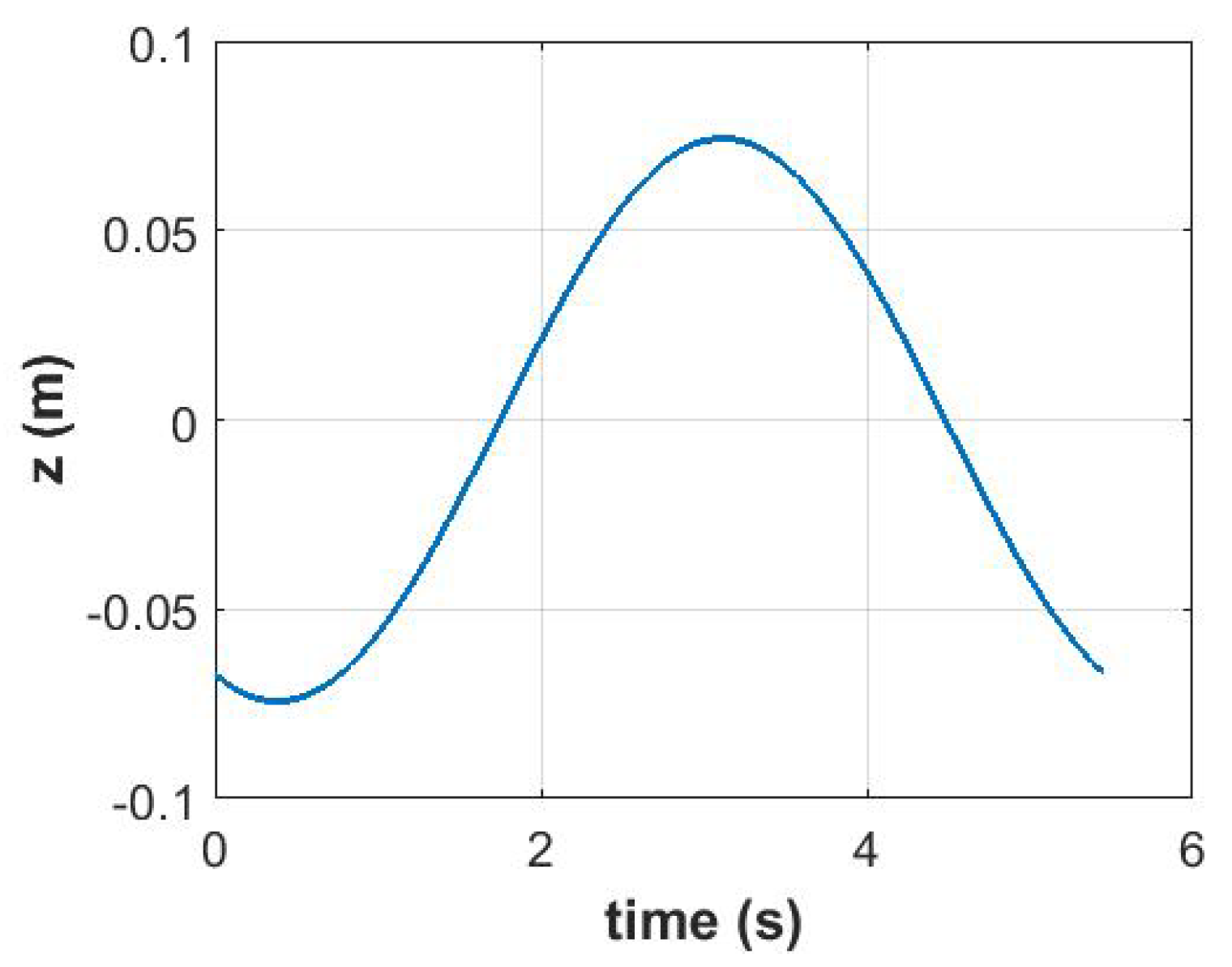
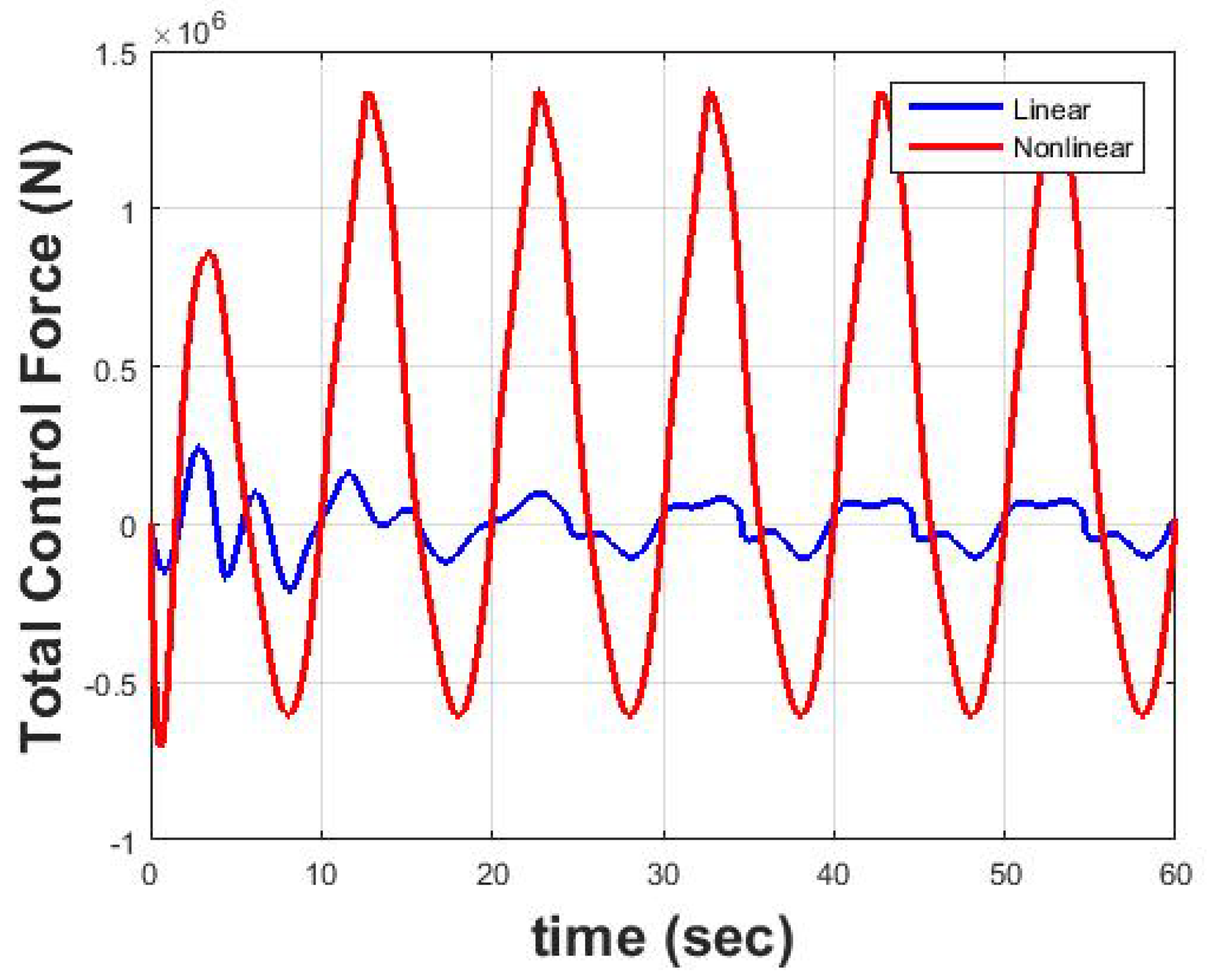
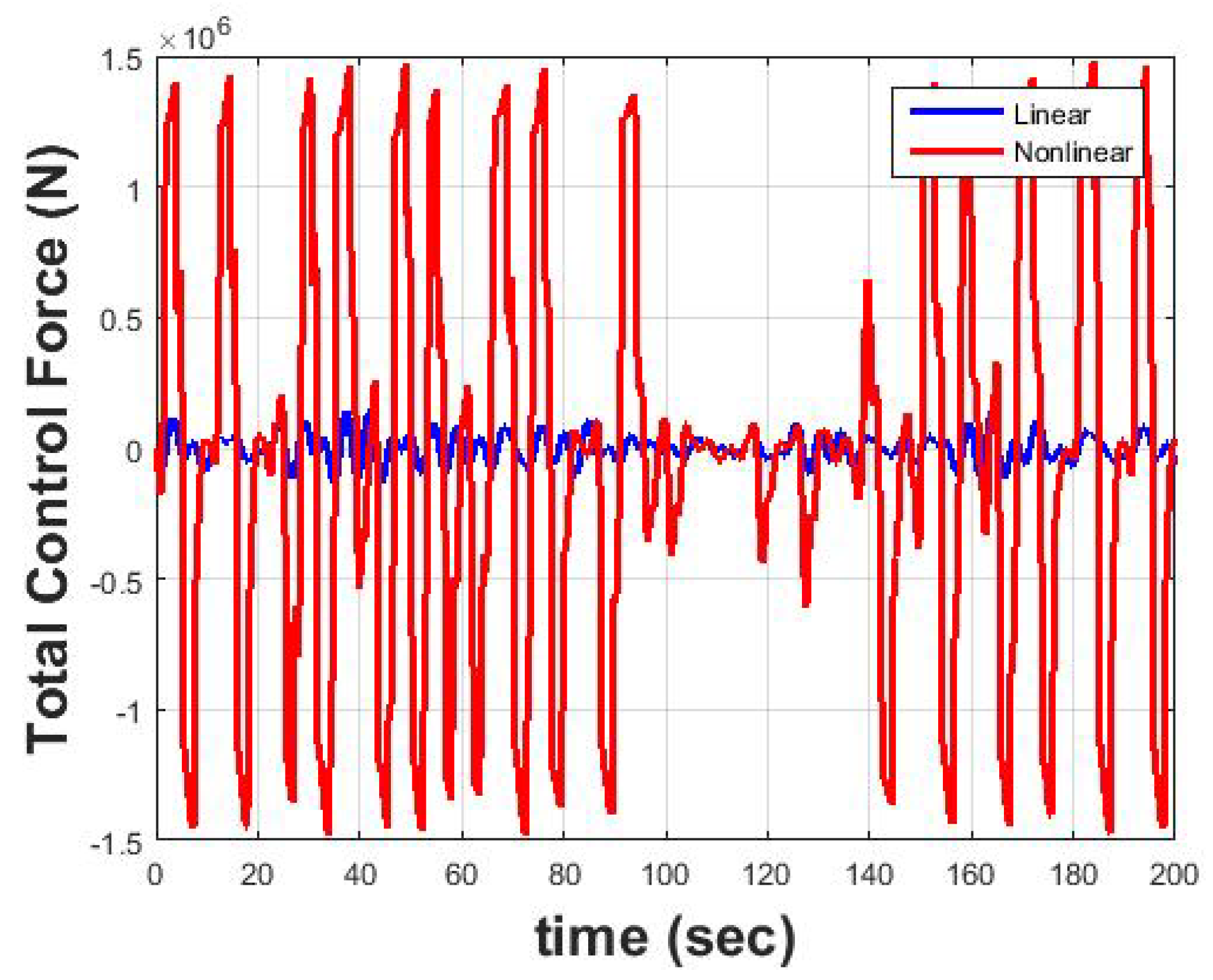
Figure 4. The control force is shown in
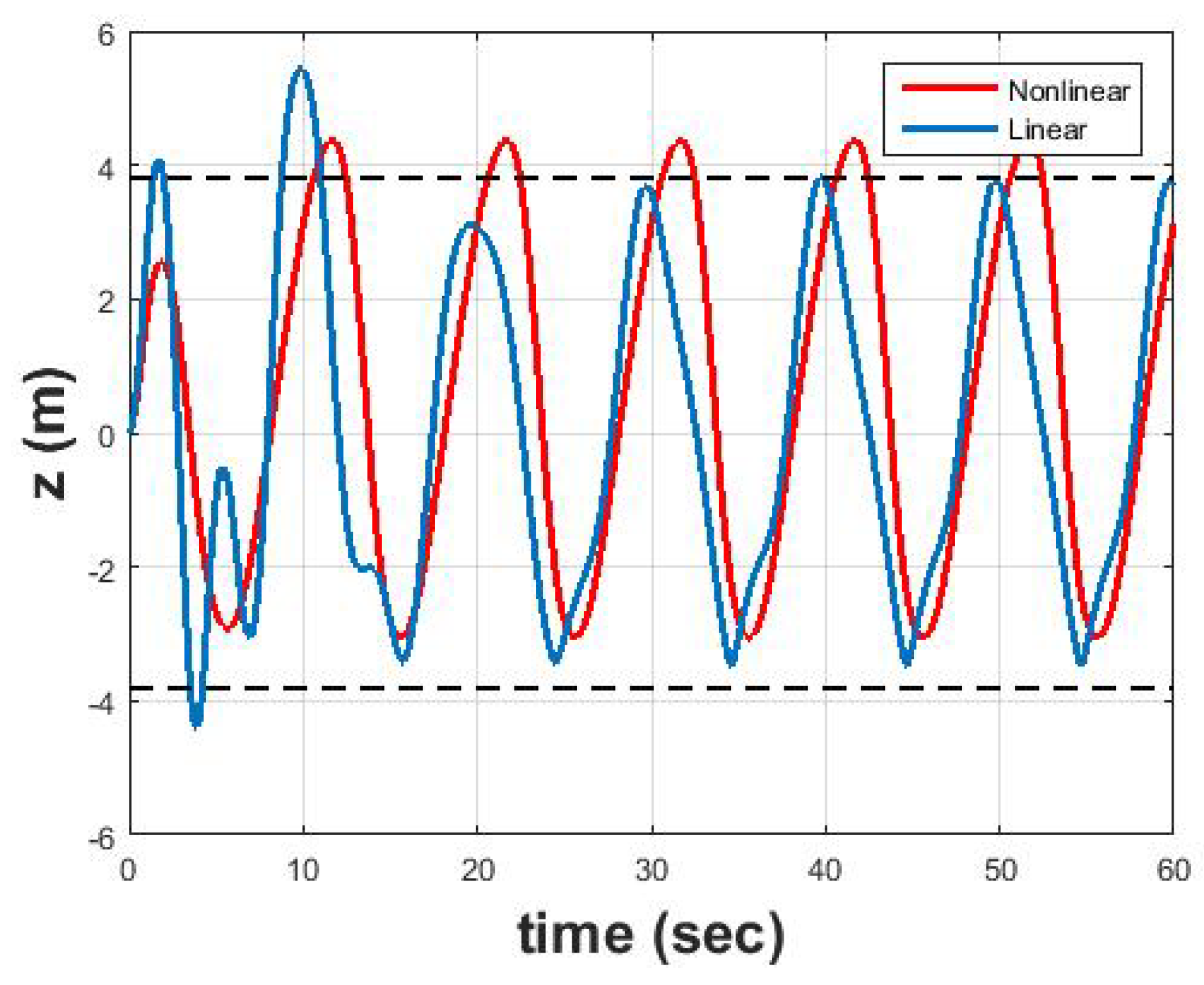
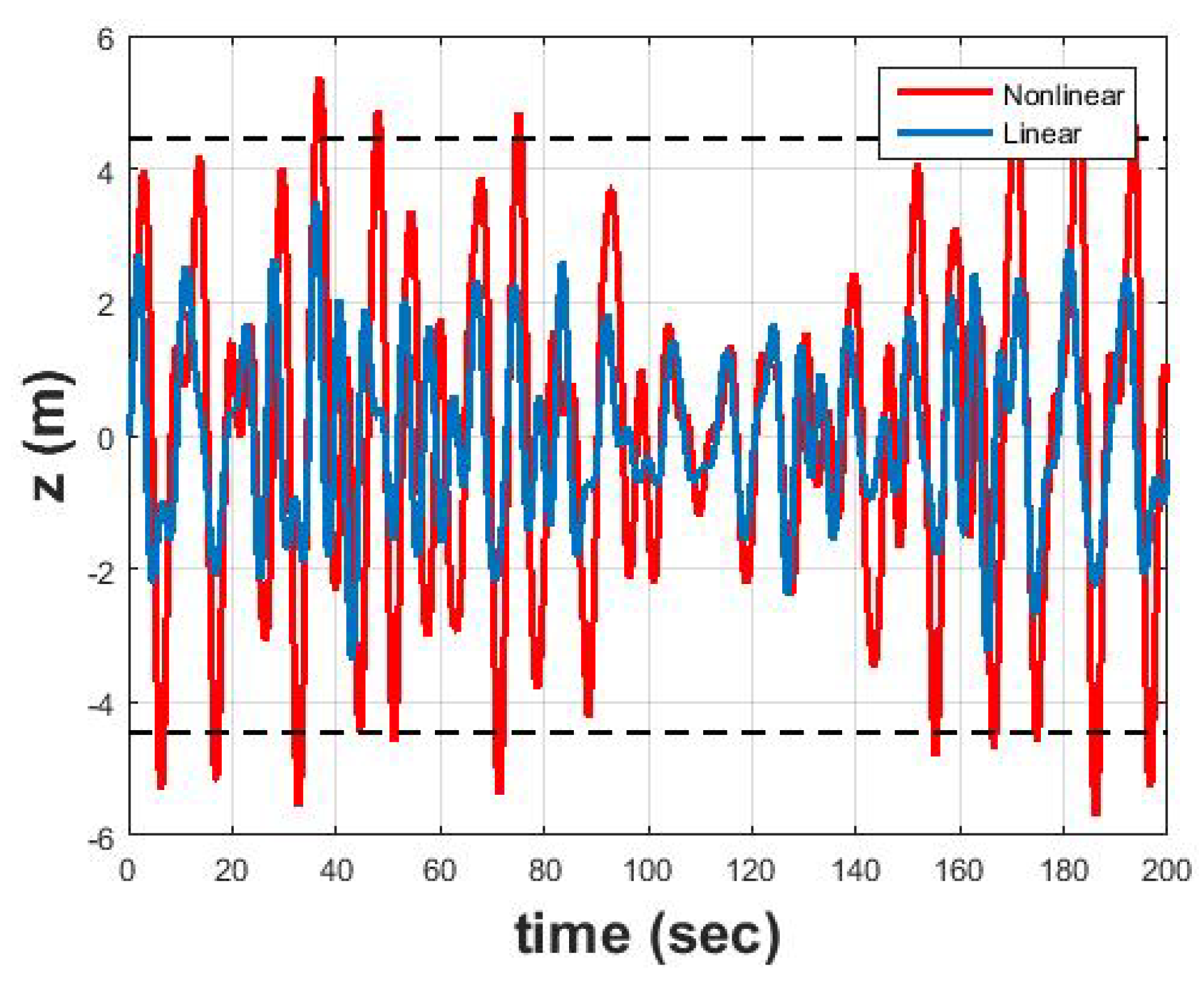
Figure 5, and the position of the buoy is shown in
Figure 6. The motion of the buoy is recurring, and the curve in
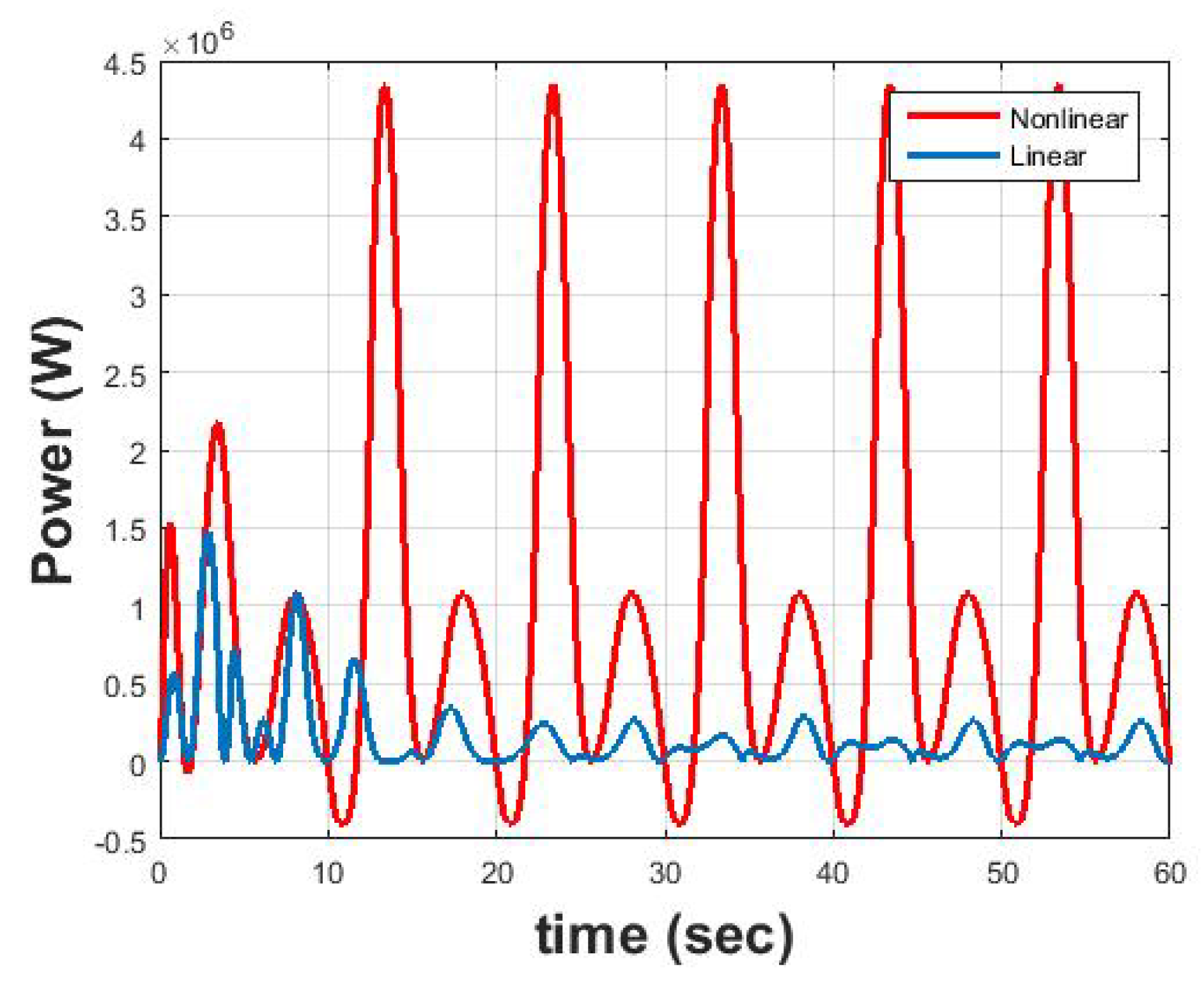
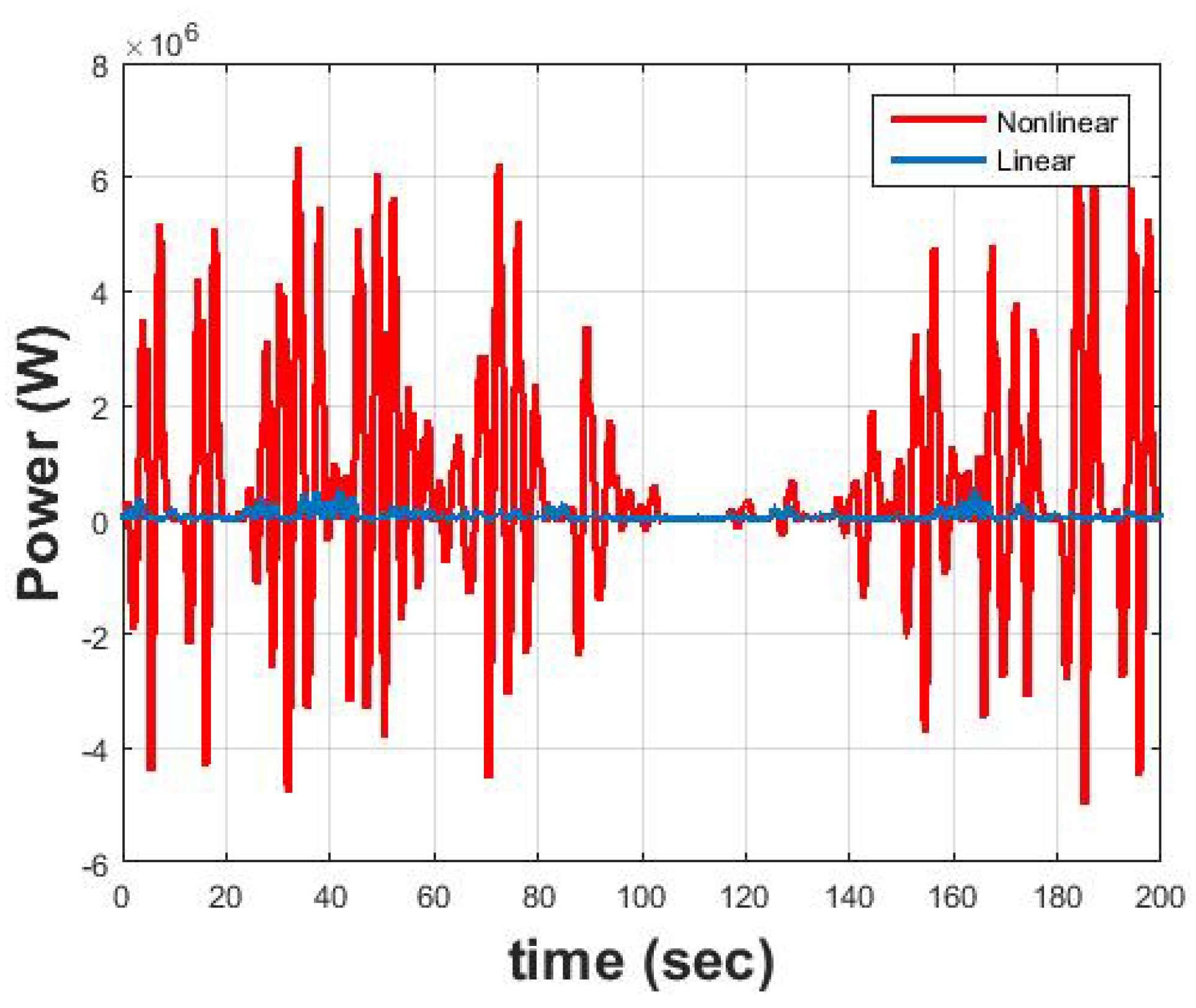
Figure 6 repeats over time. The harvested energy in this case is plotted in
Figure 7.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}