Numerical Investigation on Vortex-Induced Vibration Suppression of a Circular Cylinder with Axial-Slats


Abstract
:1. Introduction
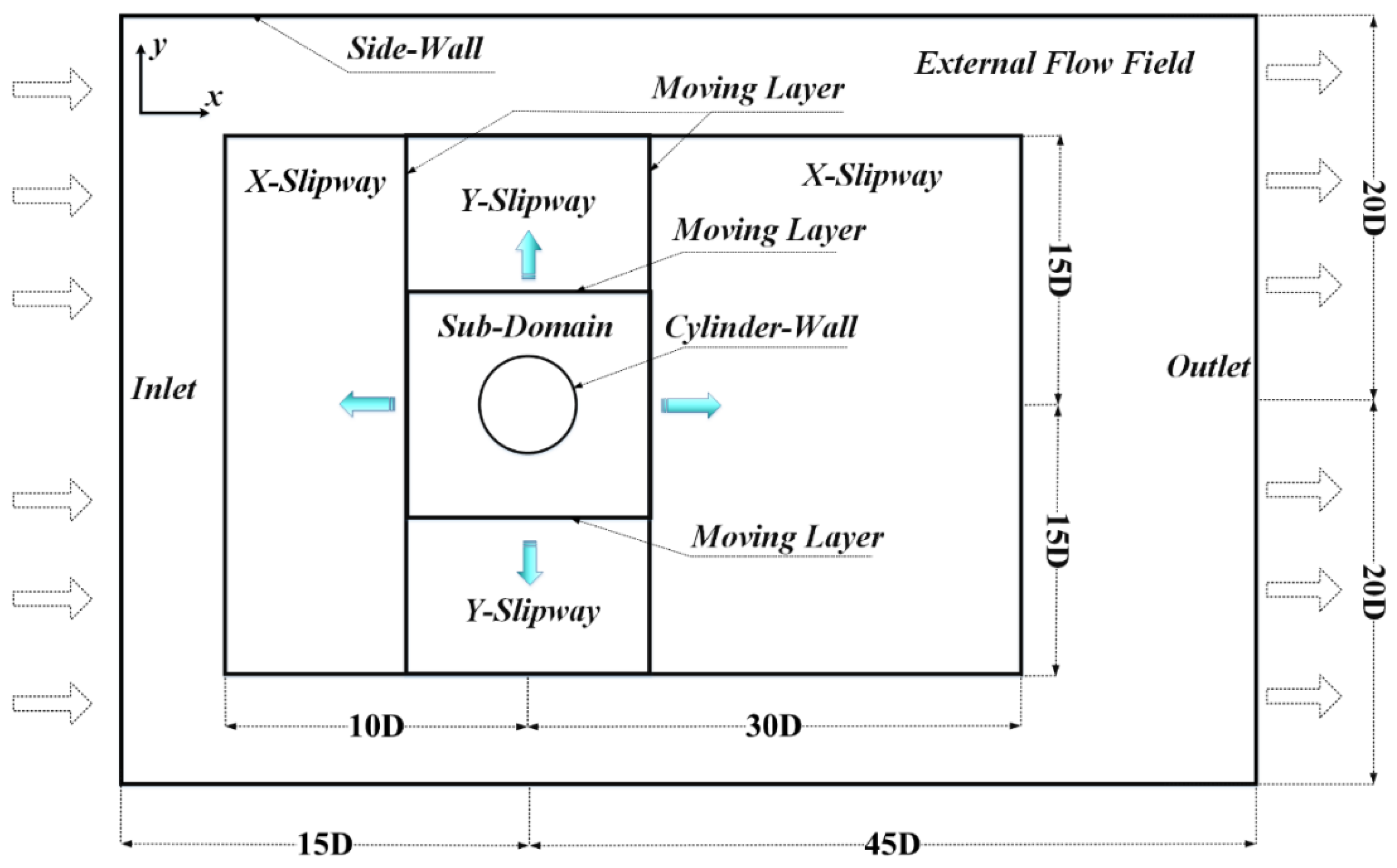
2. Problem Description
3. Computational Method
3.1. Numerical Approach
3.2. Computational Mesh and Mesh Dependence Check
3.3. Numerical Model Validation
4. Results and Discussions
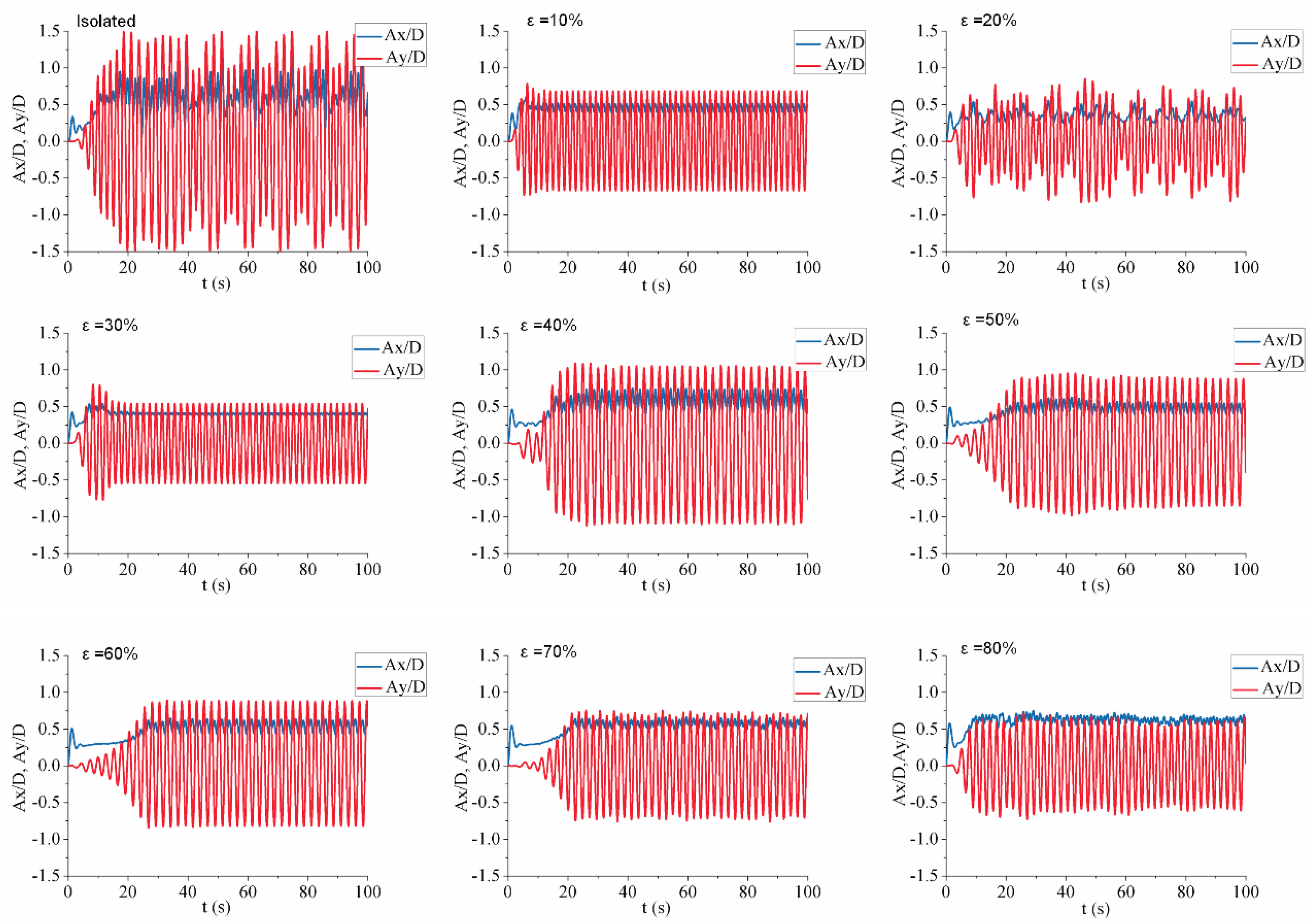
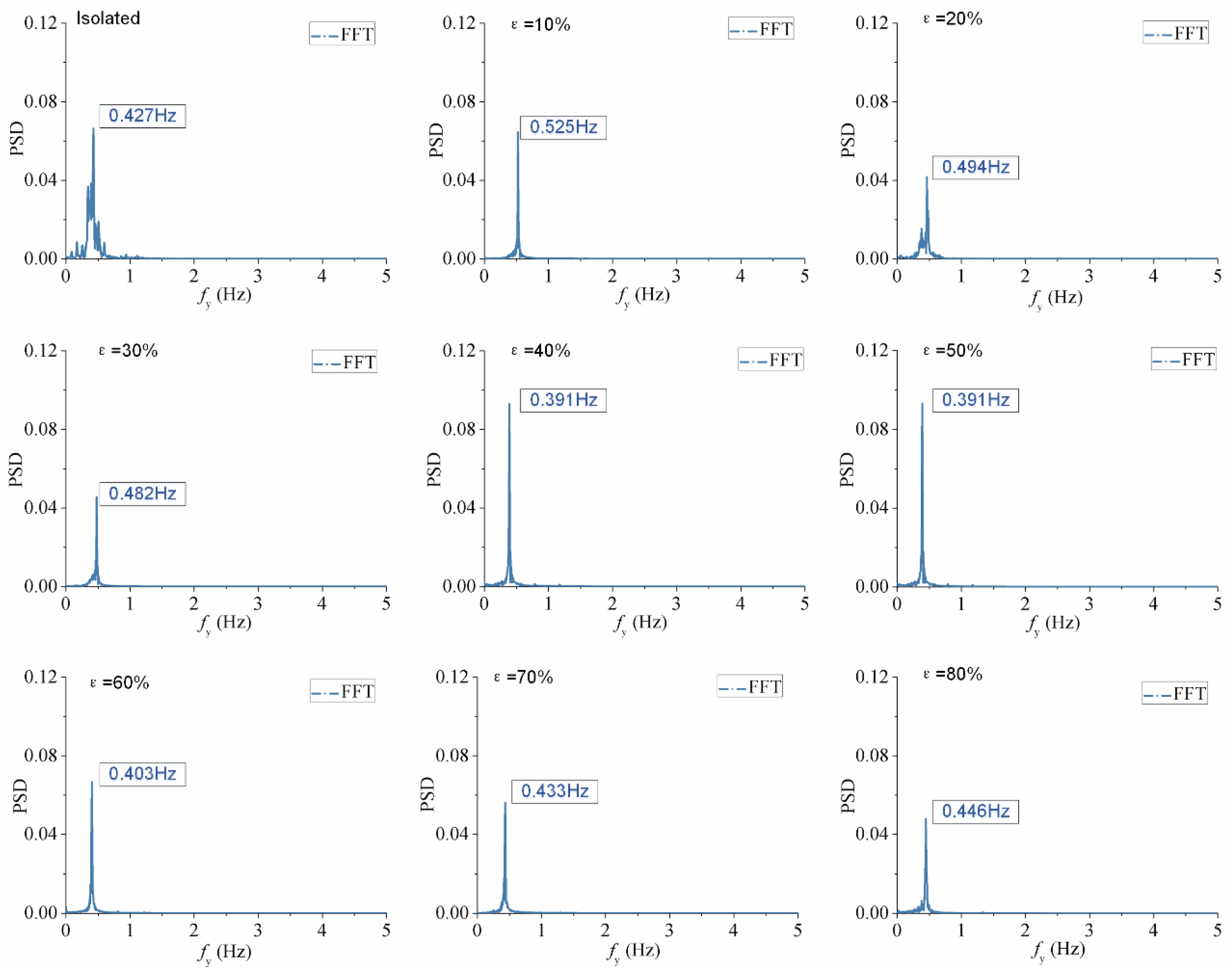
4.1. Effect of Coverage Ratio
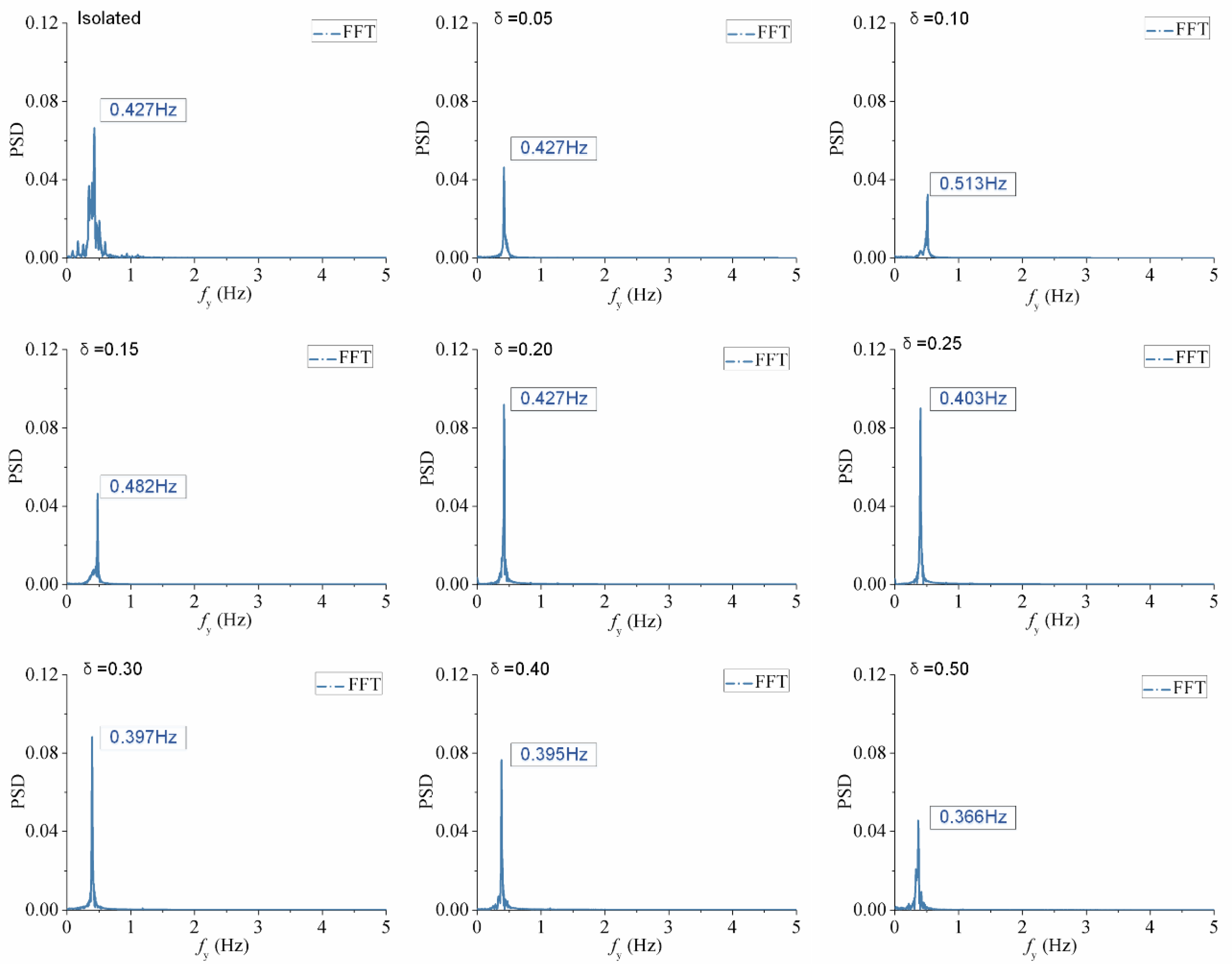
4.2. Effect of the Gap Ratio
4.3. Reynolds Number and Drag coefficient
5. Conclusions
- (1)
- The coverage ratio (ε) of axial-slats was variable. The in-line amplitude response was effectively suppressed using axial-slats. Especially for ε = 30%, the in-line amplitude ratio was close to 0, and the cross-flow amplitude ratio was close to 0.5, which decreased by about 66.7% compared with that of isolated cylinder. The damage degree of vortex pattern was different, which indicates that the axial-slats at certain locations have a great influence on vortex shedding. However, the suppression effect using axial-slats at some locations could be ineffective. Some ineffective axial-slats could be appropriately reduced to reduce the cost of axial-slats in engineering practice.
- (2)
- The gap ratio (δ) of axial-slats was variable. Although the gap ratios of axial-slats were different, the damage degrees of vortex pattern were similar. When 0.05 ≤ δ ≤ 0.15, the axial-slats were obviously helpful to suppress VIV. When δ ≥ 0.20, the vibration frequency was in the “lock-in” range of isolated cylinder (fy/fn ≈ 1.0) and the suppression effect was weakened.
- (3)
- Based on the VIV response, the whole VIV response region was divided into four regions. In region II and region III, the 2S mode was changed to the P + S mode in the far wake region, which shows that the axial-slats destroyed the original vortex street and made the vortex easy to separate. The frequency ratio jumped between region II and region III for the isolated cylinder. However, the frequency ratio jumped between region I and region II for the cylinder with axial-slats.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Wang, W.; Song, B.; Mao, Z.; Tian, W.; Zhang, T. Numerical investigation on VIV suppression of marine riser with triangle groove strips attached on its surface. Int. J. Nav. Archit. Ocean Eng. 2019, 11, 875–882. [Google Scholar] [CrossRef]
- Nikoo, H.M.; Bi, K.; Hao, H. Effectiveness of using pipe-in-pipe (PIP) concept to reduce vortex-induced vibrations (VIV): Three-dimensional two-way FSI analysis. Ocean Eng. 2018, 148, 263–276. [Google Scholar] [CrossRef]
- Ding, W.J.; Sun, H.; Xu, W.H.; Bernitsas, M.M. Numerical investigation on interactive FIO of two-tandem cylinders for hydrokinetic energy harnessing. Ocean Eng. 2019, 187, 106215. [Google Scholar] [CrossRef]
- Dorogi, D.; Baranyi, L. Numerical simulation of a freely vibrating circular cylinder with different natural frequencies. Ocean Eng. 2018, 158, 196–207. [Google Scholar] [CrossRef] [Green Version]
- Kang, Z.; Zhang, C.; Ma, G.; Ni, W.C. A numerical investigation of two-degree-of-freedom VIV of a circular cylinder using the modified turbulence model. Ocean Eng. 2018, 155, 211–226. [Google Scholar] [CrossRef]
- Zdravkovich, M.M. Review and classification of various aerodynamic and hydrodynamic means for suppressing vortex shedding. J. Wind Eng. Ind. Aerodyn. 1981, 7, 145–189. [Google Scholar] [CrossRef]
- Sung, Y.; Kim, W.; Mungal, M.G.; Cappelli, M.A. Aerodynamic modification of flow over bluff objects by plasma actuation. Exp. Fluids 2006, 41, 479–486. [Google Scholar] [CrossRef]
- Carini, M.; Pralits, J.O.; Luchini, P. Feedback control of vortex shedding using a full-order optimal compensator. J. Fluids Struct. 2015, 53, 15–25. [Google Scholar] [CrossRef]
- Li, Z.; Navon, I.M.; Hussaini, M.Y.; Le Dimet, F.X. Optimal control of cylinder wakes via suction and blowing. Comput. Fluids 2003, 32, 149–171. [Google Scholar] [CrossRef]
- Chan, A.S.; Dewey, P.A.; Jameson, A.; Liang, C.; Smits, A.J. Vortex suppression and drag reduction in the wake of counter-rotating cylinders. J. Fluid Mech. 2011, 679, 343–382. [Google Scholar] [CrossRef] [Green Version]
- Weier, T.; Gerbeth, G. Control of separated flows by time periodic Lorentz forces. Eur. J. Mech. B Fluids 2004, 23, 835–849. [Google Scholar] [CrossRef]
- Gao, Y.; Zong, Z.; Zou, L.; Takagi, S.; Jiang, Z. Numerical simulation of vortex-induced vibration of a circular cylinder with different surface roughness. Mar. Struct. 2018, 57, 165–179. [Google Scholar] [CrossRef]
- Zhu, H.J.; Yao, J. Numerical evaluation of passive control of VIV by small control rods. Appl. Ocean Res. 2015, 51, 93–116. [Google Scholar] [CrossRef]
- Xu, F.; Chen, W.L.; Xiao, Y.Q.; Li, H.; Ou, J.P. Numerical study on the suppression of the vortex-induced vibration of an elastically mounted cylinder by a traveling wave wall. J. Fluids Struct. 2014, 44, 145–165. [Google Scholar] [CrossRef]
- Sui, J.; Wang, J.S.; Liang, S.P.; Tian, Q.L. VIV suppression for a large mass-damping cylinder attached with helical strakes. J. Fluids Struct. 2016, 62, 125–146. [Google Scholar] [CrossRef]
- Huera-Huarte, F.J. Suppression of vortex-induced vibration in low mass-damping circular cylinders using wire meshes. Mar. Struct. 2017, 55, 200–213. [Google Scholar] [CrossRef]
- Lou, M.; Chen, Z.; Chen, P. Experimental investigation of the suppression of vortex induced vibration of two interfering risers with splitter plates. J. Nat. Gas Sci. Eng. 2016, 35, 736–752. [Google Scholar] [CrossRef]
- Zheng, H.X.; Wang, J.S. Galloping oscillation of a circular cylinder firmly combined with different shaped fairing devices. J. Fluids Struct. 2018, 77, 182–195. [Google Scholar] [CrossRef]
- Zhu, H.J.; Gao, Y. Vortex-induced vibration suppression of a main circular cylinder with two rotating control rods in its near wake: Effect of the rotation direction. J. Fluids Struct. 2017, 74, 469–491. [Google Scholar] [CrossRef]
- Shaafi, K.; Vengadesan, S. Wall proximity effects on the effectiveness of upstream control rod. J. Fluids Struct. 2014, 49, 112–134. [Google Scholar] [CrossRef]
- Wu, H.; Sun, D.P.; Lu, L.; Teng, B.; Tang, G.Q.; Song, J.N. Experimental investigation on the suppression of vortex-induced vibration of long flexible riser by multiple control rods. J. Fluids Struct. 2012, 30, 115–132. [Google Scholar] [CrossRef]
- Wong, H.Y.; Kokkalis, A. A comparative study of three aerodynamic devices for suppressing vortex-induced oscillation. J. Wind Eng. Ind. Aerodyn. 1982, 10, 21–29. [Google Scholar] [CrossRef]
- Jauvtis, N.; Williamson, C.H.K. The effect of two degrees of freedom on vortex-induced vibration at low mass and damping. J. Fluid Mech. 2004, 509, 23–62. [Google Scholar] [CrossRef]
- Zhuang, K.; Cheng, Z.; Rui, C.; Gang, M. A numerical investigation of the effects of Reynolds number on vortex-induced vibration of the cylinders with different mass ratios and frequency ratios. Int. J. Nav. Archit. Ocean Eng. 2019, 11, 835–850. [Google Scholar]
- Dappolonia, E.; Newmark, N.M. A method for the solution of the restrained cylinder under compression. J. Appl. Mech. Trans. ASME 1951, 18, 326. [Google Scholar]
- Ding, W.J.; Wang, K.Y.; Mao, Z.Y.; Cao, H. Layout optimization of an inertial energy harvester for miniature underwater mooring platforms. Mar. Struct. 2020, 69, 102681. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value |
|---|---|---|
| Mass-ratio | m* | 2.6 |
| Damping-ratio | ξ | 0.002 |
| Spring stiffness | K (N·m) | 178.6 |
| Natural frequency in water | fn (Hz) | 0.4 |
| Cylindrical diameter | D (m) | 0.1 |
| Water density | ρ (kg/m3) | 1000 |
| Water kinematic viscosity | υ (m2/s) | 1.0 × 10−6 |
| Mesh | Elements | Ay/D | f/fn |
|---|---|---|---|
| M1 | 30000 | 0.8600 | 1.2238 |
| M2 | 60000 | 0.8686(10.00%) | 1.2418 (1.47%) |
| M3 | 90000 | 0.8742 (0.64%) | 1.2488 (0.56%) |
| M4 | 120000 | 0.8765 (0.26%) | 1.2508 (0.16%) |
| M5 | 150000 | 0.8769 (0.05%) | 1.2513 (0.04%) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Mao, Z.; Tian, W.; Zhang, T. Numerical Investigation on Vortex-Induced Vibration Suppression of a Circular Cylinder with Axial-Slats. J. Mar. Sci. Eng. 2019, 7, 454. https://doi.org/10.3390/jmse7120454
Wang W, Mao Z, Tian W, Zhang T. Numerical Investigation on Vortex-Induced Vibration Suppression of a Circular Cylinder with Axial-Slats. Journal of Marine Science and Engineering. 2019; 7(12):454. https://doi.org/10.3390/jmse7120454
Chicago/Turabian StyleWang, Wei, Zhaoyong Mao, Wenlong Tian, and Tingying Zhang. 2019. "Numerical Investigation on Vortex-Induced Vibration Suppression of a Circular Cylinder with Axial-Slats" Journal of Marine Science and Engineering 7, no. 12: 454. https://doi.org/10.3390/jmse7120454