Deployment and Maintenance of Wave Energy Converters at the Lysekil Research Site: A Comparative Study on the Use of Divers and Remotely-Operated Vehicles

 , ,
, ,
Abstract
:1. Introduction
1.1. Overview
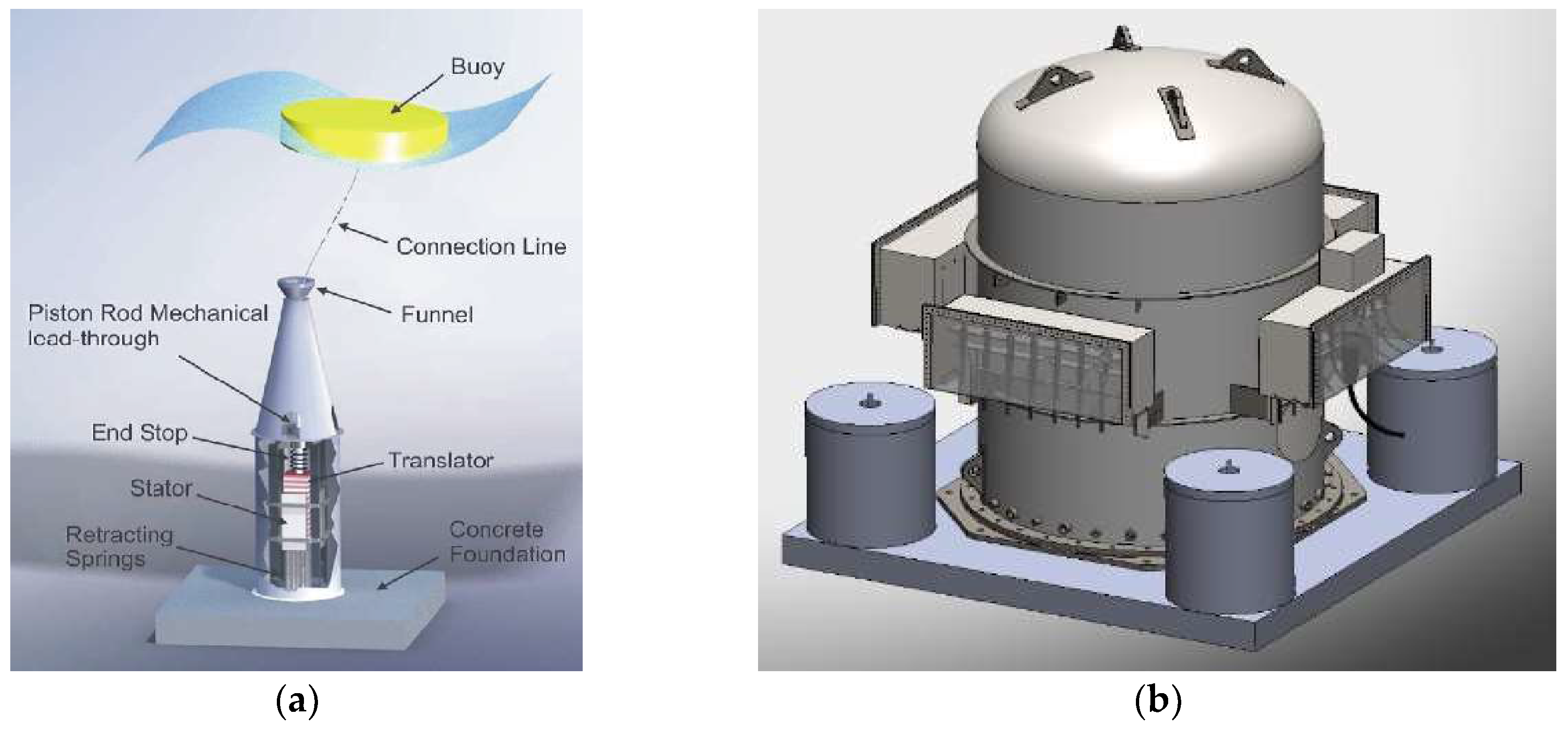
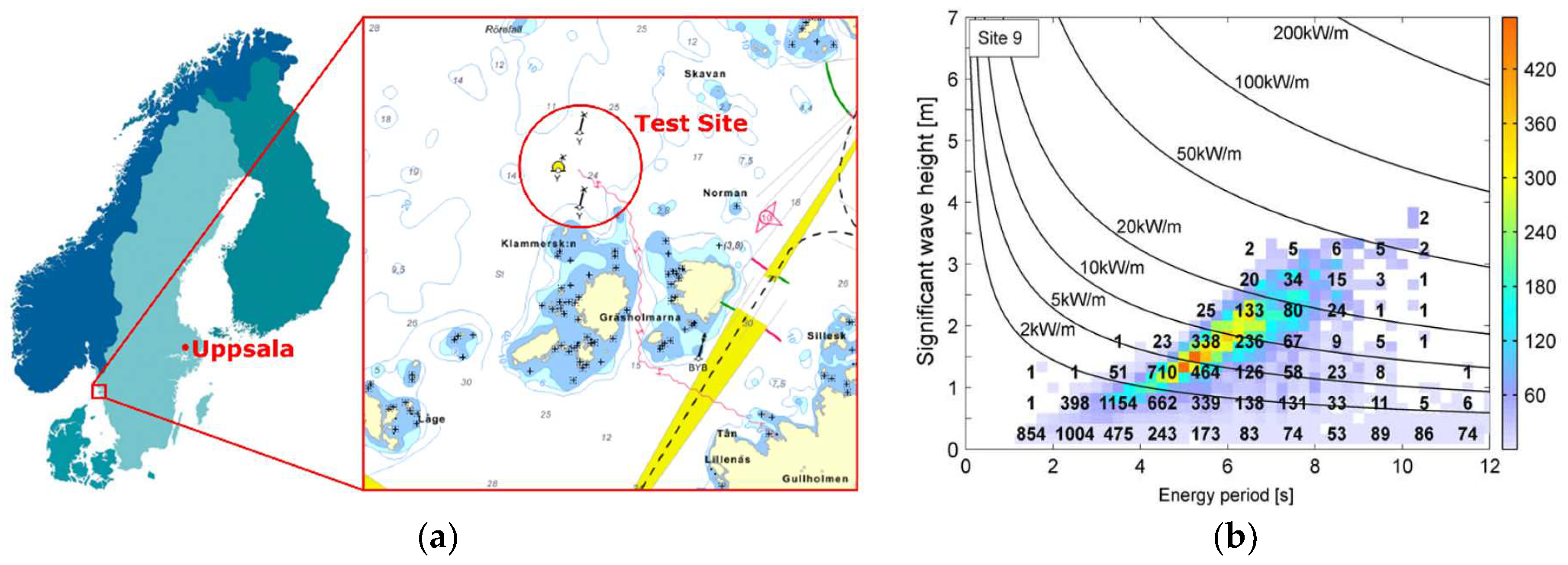
1.2. Lysekil Research Site and Wave Energy Converter Concept
1.3. Deployment and Monitoring of WECs, Buoy Lines, and Sea Cables
1.4. Paper Contribution and Outline
2. Background on Commercial Diving and Remotely Operated Vehicles (ROVs)
2.1. Introduction to Commercial Diving
2.1.1. Background
2.1.2. Costs of Dive Missions
2.2. Introduction to Underwater Robots
3. Methods
3.1. Deployment Methods
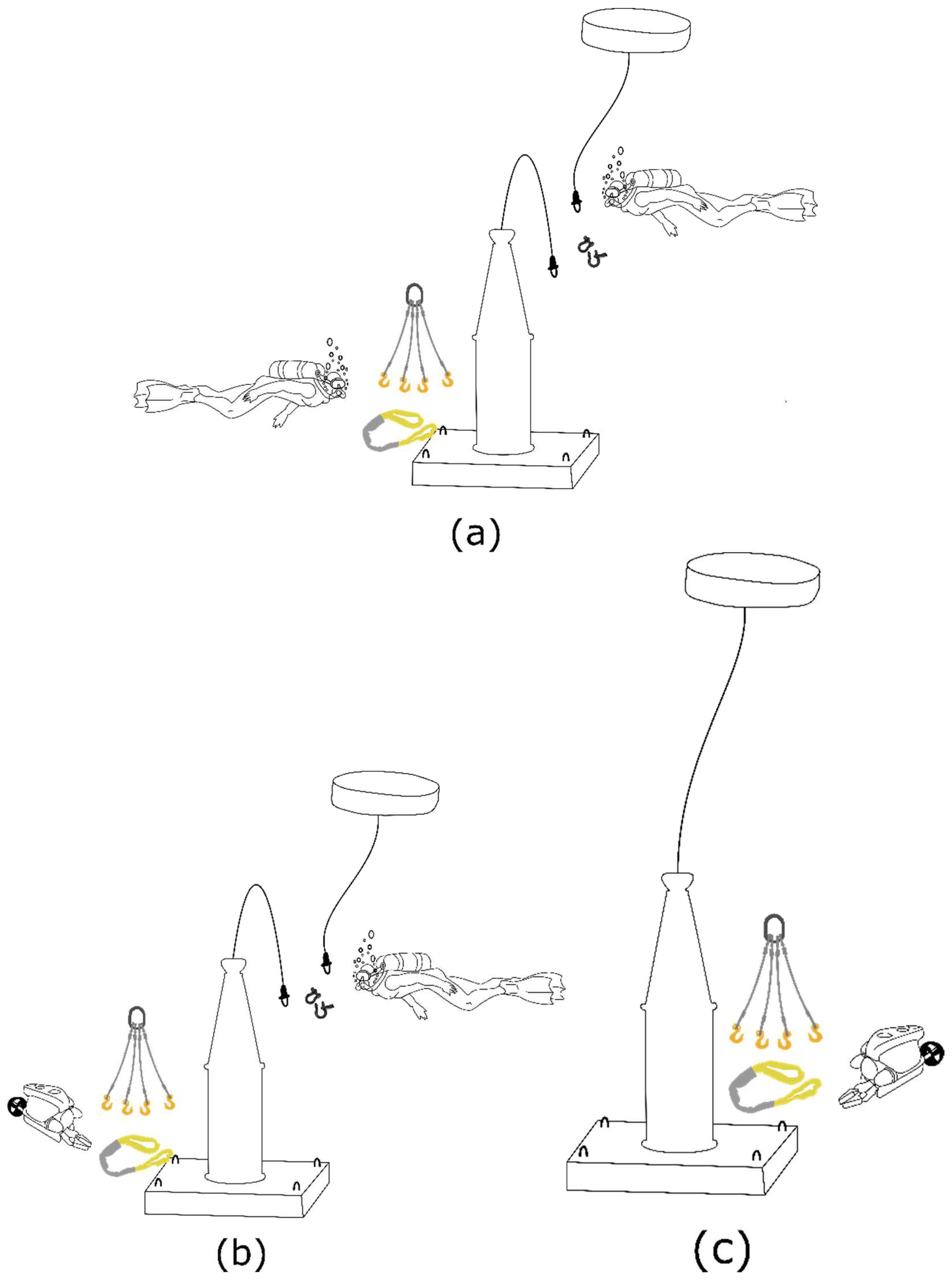
3.1.1. Method 1—Wave Energy Convertors (WEC) and Buoy Deployment Separately (Work Done by Divers Only)
3.1.2. Method 2—WEC and Buoy Deployment Separately (Work Done by Divers and ROVs)
3.1.3. Method 3—WEC and Buoy Deployed Together (Work Done by ROVs Only)
3.2. Monitoring and Maintenance Operations
3.2.1. ROV-Assisted Monitoring
3.2.2. Diving-Assisted Monitoring
3.3. Evaluation of Time, Safety, and Complexity of Underwater Tasks Assisted by Divers or ROVs
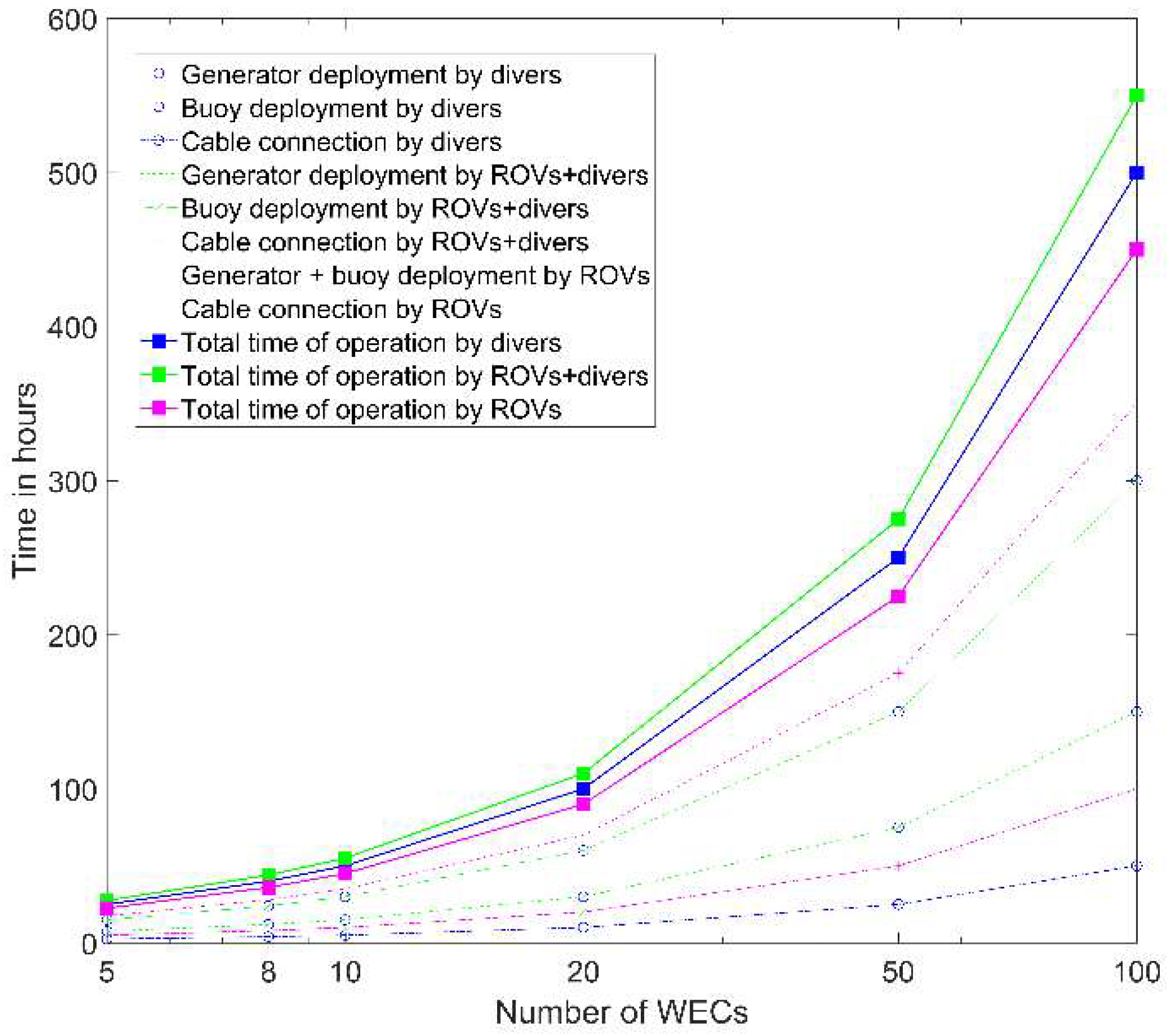
3.4. Comparative Study on Time and Cost of Operations
4. Results and Discussion
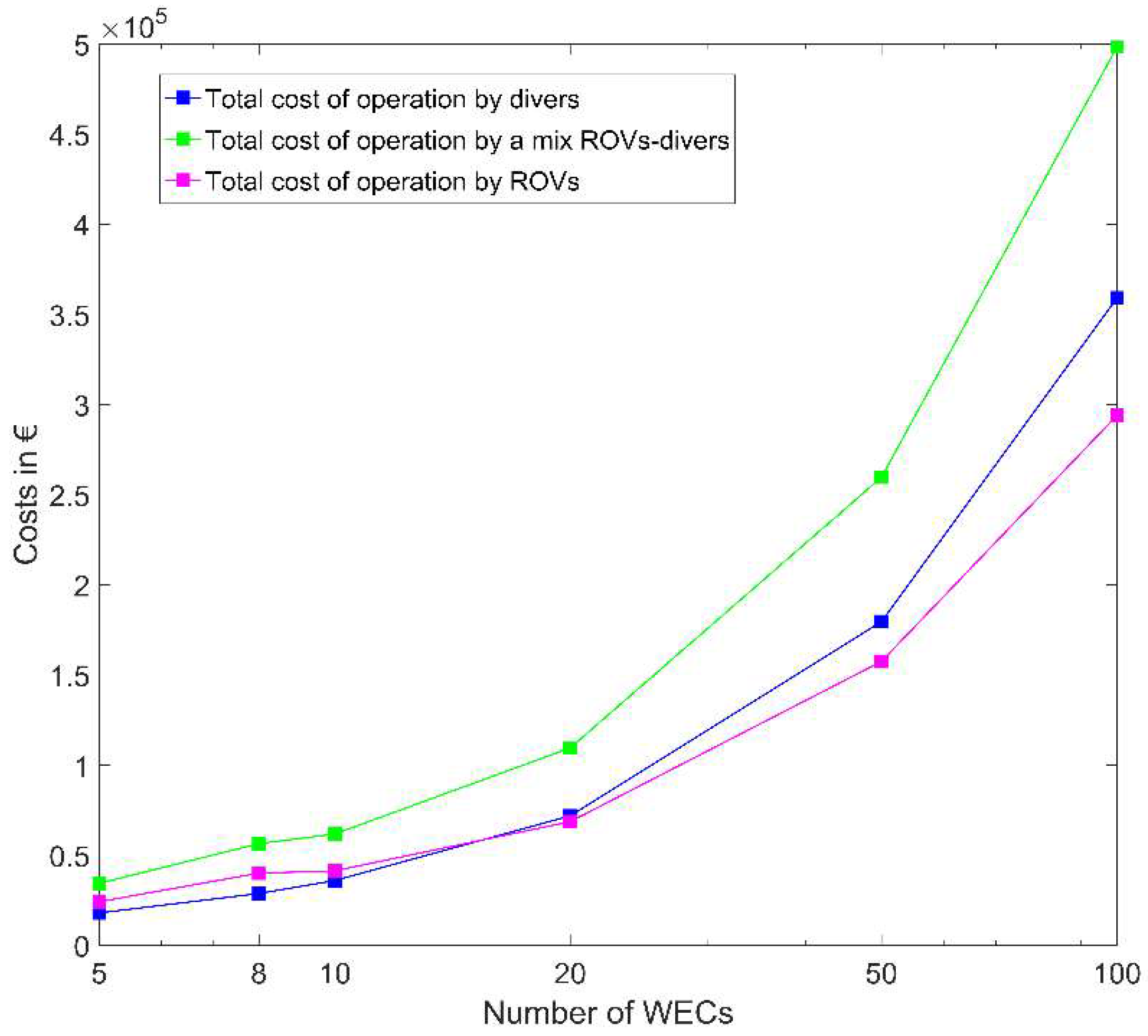
4.1. Deployment
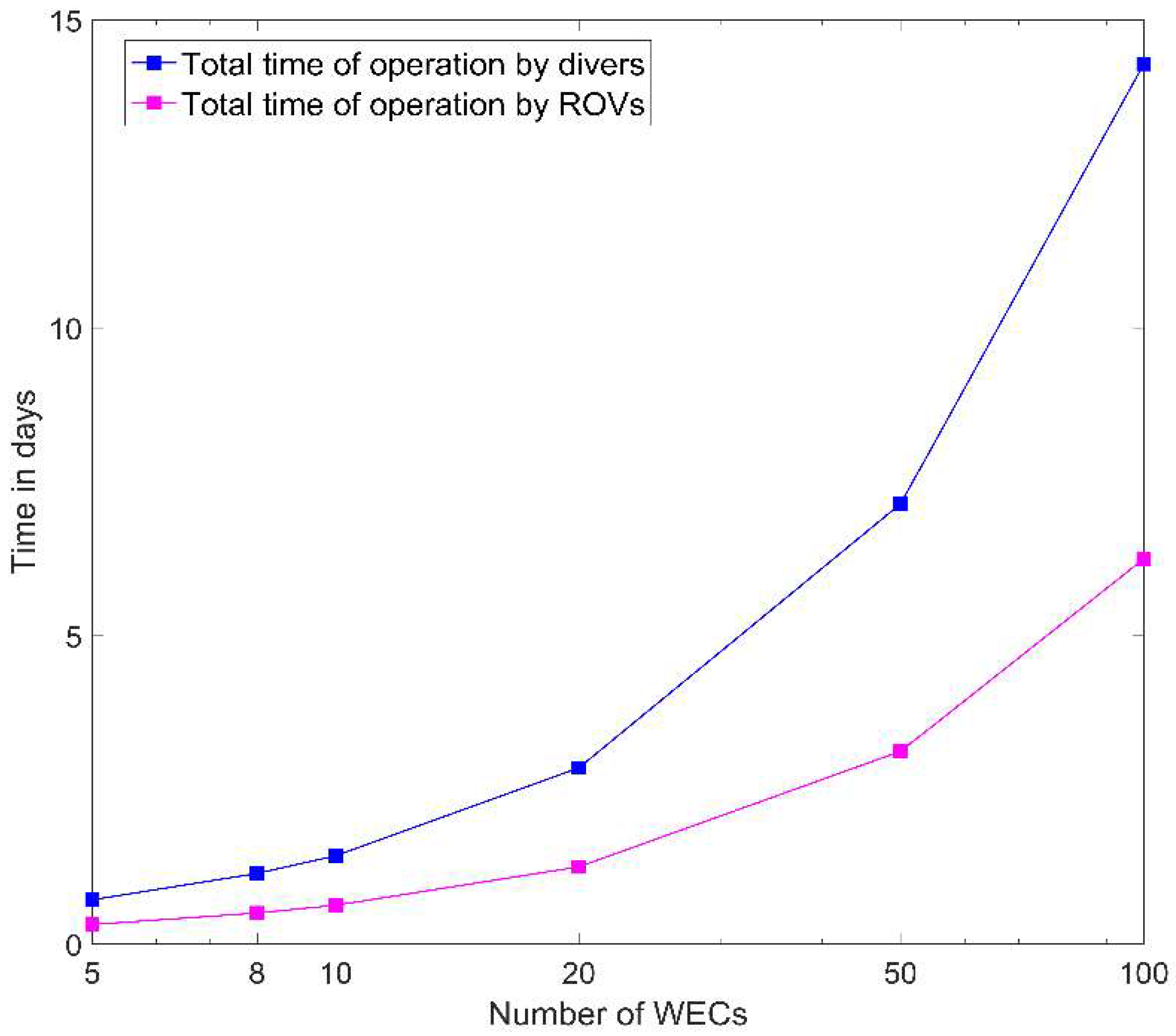
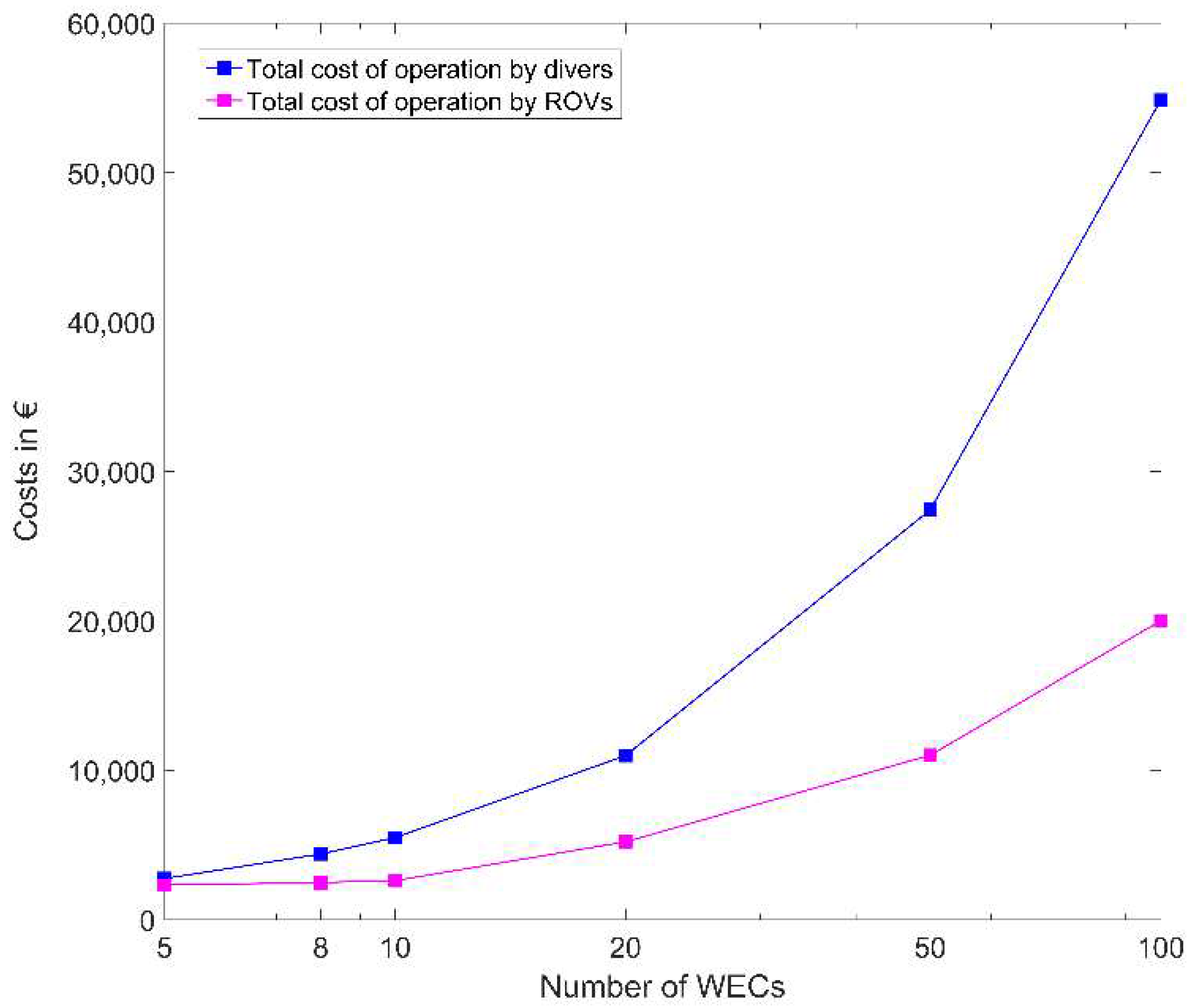
4.2. Monitoring
4.3. Purchasing Versus Renting a ROV
4.4. Adapting Processes from the Offshore Wind Field of Application
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lawso, J. A perfect match?: Oil and gas companies have learned to overcome many offshore difficulties, so what, if anything, can they bring to the renewable energy table? Renew. Energy Focus 2011, 12, 38–40. [Google Scholar] [CrossRef]
- Capocci, R.; Dooly, G.; Toal, D. Offshore renewable energy systems: Solutions for reduction in operational costs. In Proceedings of the 2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 11–13 April 2017; pp. 1–8. [Google Scholar]
- Shukla, A.; Karki, H. Application of robotics in offshore oil and gas industry—A review Part II. Robot. Auton. Syst. 2016, 75 Pt B, 508–524. [Google Scholar] [CrossRef]
- Stavinoha, S.; Chen, H.; Walker, M.; Zhang, B.; Fuhlbrigge, T. Challenges of robotics and automation in offshore oil and gas industry. In Proceedings of the 4th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent, Hong Kong, China, 4–7 June 2014; pp. 557–562. [Google Scholar]
- Leijon, M.; Waters, R.; Rahm, M.; Svensson, O.; Bostrom, C.; Stromstedt, E.; Engstrom, J.; Tyrberg, S.; Savin, A.; Gravrakmo, H.; et al. Catch the wave to electricity. IEEE Power Energy Mag. 2009, 7, 50–54. [Google Scholar] [CrossRef]
- Lejerskog, E.; Boström, C.; Hai, L.; Waters, R.; Leijon, M. Experimental results on power absorption from a wave energy converter at the Lysekil wave energy research site. Renew. Energy 2015, 77, 9–14. [Google Scholar] [CrossRef]
- Parwal, A.; Remouit, F.; Hong, Y.; Francisco, F.; Castelucci, V.; Hai, L.; Ulvgård, L.; Li, W.; Lejerskog, E.; Baudoin, A.; et al. Wave Energy Research at Uppsala University and the Lysekil Research Site, Sweden: A Status Update. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC), Nantes, France, 6–11 September 2015. [Google Scholar]
- Chatzigiannakou, M.A.; Dolguntseva, I.; Leijon, M. Offshore Deployments of Wave Energy Converters by Seabased Industry AB. J. Mar. Sci. Eng. 2017, 5, 15. [Google Scholar] [CrossRef]
- Göteman, M.; Engström, J.; Eriksson, M.; Isberg, J. Numerical and semi-analytical methods for optimizing wave energy parks. In Proceedings of the 11th International Conference on Hydrodynamics (ICHD 2014), Singapore, 19–24 October 2014. [Google Scholar]
- Engström, J.; Eriksson, M.; Göteman, M.; Isberg, J.; Leijon, M. Performance of large arrays of point absorbing direct-driven wave energy converters. J. Appl. Phys. 2013, 114, 204502. [Google Scholar] [CrossRef]
- Hong, Y.; Eriksson, M.; Boström, C.; Waters, R. Impact of Generator Stroke Length on Energy Production for a Direct Drive Wave Energy Converter. Energies 2016, 9, 730. [Google Scholar] [CrossRef]
- Chatzigiannakou, M.A.; Dolguntseva, I.; Ekström, R.L.; Leijon, M. Offshore Deployment of Marine Substation in the Lysekil Research Site. Presented at the Twenty-Fifth International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015. [Google Scholar]
- Ekström, R.; Baudoin, A.; Rahm, M.; Leijon, M. Marine substation design for grid-connection of a research wave power plant on the Swedish West coast. In Proceedings of the 10th European Wave and Tidal Conference (EWTEC), Aalborg, Denmark, 2–5 September 2013. [Google Scholar]
- Ekström, R.; Kurupath, V.; Svensson, O.; Leijon, M. Measurement system design and implementation for grid-connected marine substation. Renew. Energy 2013, 55, 338–346. [Google Scholar] [CrossRef]
- Rahm, M.; Bostrom, C.; Svensson, O.; Grabbe, M.; Bulow, F.; Leijon, M. Offshore underwater substation for wave energy converter arrays. IET Renew. Power Gener. 2010, 4, 602–612. [Google Scholar] [CrossRef]
- Cato, I.; Kjellin, B. Maringeologiska undersökningar vid vågkraft-anläggning utanför Islandsberg, Bohuslän; SGU-rapport; Sveriges Geologiska Undersökning: Sweden, Uppsala, 2008; p. 10. [Google Scholar]
- Lejerskog, E.; Gravråkmo, H.; Savin, A.; Strömstedt, E.; Tyrberg, S.; Haikonen, K.; Krishna, R.; Boström, C.; Rahm, M.; Ekström, R.; et al. Lysekil Research Site, Sweden: Status Update. In Proceedings of the 9th European Wave and Tidal Energy Conference (EWTEC), Southampton, UK, 5–9 September 2011. [Google Scholar]
- Waters, R.; Engström, J.; Isberg, J.; Leijon, M. Wave climate off the Swedish west coast. Renew. Energy 2009, 34, 1600–1606. [Google Scholar] [CrossRef]
- Chatzigiannakou, M.A.; Dolguntseva, I.; Leijon, M. Offshore Deployment of Point Absorbing Wave Energy Converters with a Direct Driven Linear Generator Power Take-Off at the Lysekil Test Site. In Proceedings of the SME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; p. V09AT09A023. [Google Scholar]
- A Set-Up of 7 Laser Triangulation Sensors and a Draw-Wire Sensor for Measuring Relative Displacement of a Piston Rod Mechanical Lead-Through Transmission in an Offshore Wave Energy Converter on the Ocean Floor. Available online: https://www.hindawi.com/journals/isrn/2012/746865/ (accessed on 17 January 2018).
- Mueller, M.; Wallace, R. Enabling science and technology for marine renewable energy. Energy Policy 2008, 36, 4376–4382. [Google Scholar] [CrossRef]
- Bahaj, A. Generating electricity from the oceans. Renew. Sustain. Energy Rev. 2011, 36, 4136–4141. [Google Scholar] [CrossRef]
- Kelly, J.; O’Sullivan, D.; Wright, W.; Alcorn, R.; Lewis, A.W. Challenges and lessons learned in the deployment of an offshore oscillating water column. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2014, 33, 1678–1704. [Google Scholar] [CrossRef]
- Henry, A.; Doherty, K.; Cameron, L.; Whittaker, T.; Doherty, R. Advances in the Design of the Oyster Wave Energy Converter. In Proceedings of the Marine Renewables and Offshore Wind Conference, Royal Institute of Naval Architects, At RINA HQ, London, UK, 21–23 April 2010. [Google Scholar]
- Marine Renewable Energy Technology and Environmental|Mark A. Shields|Springer. Available online: http://www.springer.com/la/book/9789401780018 (accessed on 12 December 2017).
- Chen, H.; Stavinoha, S.; Walker, M.; Zhang, B.; Fuhlbrigge, T. Opportunities and Challenges of Robotics and Automation in Offshore Oil & Gas Industry. Intell. Control Autom. 2014, 5, 136. [Google Scholar]
- Anisi, D.A.; Skourup, C. A step-wise approach to oil and gas robotics. IFAC Proc. 2012, 45, 47–52. [Google Scholar] [CrossRef]
- Stewart, D.J. Book Review: Maritime Archaeology: A Reader of Substantive and Theoretical Contributions edited by Lawrence E. Babits and Hans Van Tilburg. Northeast Hist. Archaeol. 1998, 27, 11. [Google Scholar] [CrossRef]
- Adie, W.; Cairns, J.; Macdiarmid, J.; Ross, J.; Watt, S.; Taylor, C.L.; Osman, L.M. Safety culture and accident risk control: Perceptions of professional divers and offshore workers. Saf. Sci. 2005, 43, 131–145. [Google Scholar] [CrossRef]
- Douglas, J.D.; Milne, A.H. Decompression sickness in fish farm workers: A new occupational hazard. BMJ 1991, 302, 1244–1245. [Google Scholar] [CrossRef] [PubMed]
- Myers, M.L. Review of occupational hazards associated with aquaculture. J. Agromed. 2010, 15, 412–426. [Google Scholar] [CrossRef]
- Adapting Offshore Wind Power Foundations to Local Environment, Naturvårdsverket. Available online: http://www.naturvardsverket.se/Om-Naturvardsverket/Publikationer/ISBN/6300/978-91-620-6367-2/ (accessed on 16 January 2018).
- Documents. Available online: http://www.edtc.org/Documents.htm (accessed on 6 February 2018).
- Dykeriarbete (AFS 2010:16), föreskrifter—Arbetsmiljöverket. Available online: https://www.av.se/arbetsmiljoarbete-och-inspektioner/publikationer/foreskrifter/dykeriarbete-afs-201016-foreskrifter/ (accessed on 16 January 2018).
- RMS-Dyk, Kapitel 13 Dekompressionstabeller. Available online: http://dokument.forsvarsmakten.se/RMS/rms_2013/webb/RMS_Dyk/RMS_Dyk_Kap_13/RMS_Dyk_Kap_13.htm#CIHIFHIG (accessed on 16 January 2018).
- Molland, A.F. (Ed.) Underwater vehicles. In The Maritime Engineering Reference Book; Butterworth-Heinemann: Oxford, UK, 2008; Chapter 10; pp. 728–783. [Google Scholar]
- Wynn, R.B.; Huvenne, V.A.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Christ, R.D.; Sr, R.L.W. The ROV Manual, a User Guide for Remotely-Operated Vehicles, 2nd ed.; Butterworth-Heinemann: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Capocci, R.; Dooly, G.; Omerdić, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-Class Remotely-operated vehicles—A Review. J. Mar. Sci. Eng. 2017, 5, 13. [Google Scholar] [CrossRef]
- Chatzigiannakou, M.A.; Ulvgård, L.; Dolguntseva, I.; Leijon, M. Offshore Deployments of Wave Energy Converters by Uppsala University. Mar. Syst. Ocean Technol. 2018. submitted. [Google Scholar]
- Remouit, F. Underwater Electrical Connections and Remotely-Operated Vehicles. Licenciate Thesis, Uppsala University, Uppsala, Sweden, 2016. [Google Scholar]
- Remouit, F.; Lopes, M.F.; Pires, P.; Sebastiao, L.; Rahm, M. Automation of Subsea Connection for Clusters of Wave Energy Converters. In Proceedings of the 26th Conference ISOPE, Kona, HI, USA, 21–26 June 2016; Available online: https://www.researchgate.net/publication/283552145_Automation_of_subsea_connection_for_clusters_of_wave_energy_converters (accessed on 12 December 2017).
- Pacunski, R.; Palsson, W.; Greene, H.; Gunderson, D. Conducting Visual Surveys with a Small ROV in Shallow Water. In Marine Habitat Mapping Technology for Alaska; Reynolds, J.R., Greene, H.G., Eds.; University of Alaska Fairbanks: Alaska, AK, USA, 2008. [Google Scholar] [CrossRef]
- Ajemian, M.J.; Wetz, J.J.; Shipley-Lozano, B.; Stunz, G.W. Rapid assessment of fish communities on submerged oil and gas platform reefs using remotely-operated vehicles. Fish. Res. 2015, 167, 143–155. [Google Scholar] [CrossRef]
- Kato, N.; Choyekh, M.; Dewantara, R.; Senga, H.; Chiba, H.; Kobayashi, E.; Yoshie, M.; Tanaka, T.; Short, T. An autonomous underwater robot for tracking and monitoring of subsea plumes after oil spills and gas leaks from seafloor. J. Loss Prev. Process Ind. 2017, 50, 386–396. [Google Scholar] [CrossRef]
- Christensen, D.J.; Andersen, J.C.; Blanke, M.; Furno, L.; Galeazzi, R.; Hansen, P.N.; Nielsen, M.C. Collective Modular Underwater Robotic System for Long-Term Autonomous Operation. Science 2014, 19, 35–40. [Google Scholar]
- Djapic, V.; Dong, W.; Spaccini, D.; Cario, G.; Casavola, A.; Gjanci, P.; Lupia, M.; Petrioli, C. Cooperation of coordinated teams of Autonomous Underwater Vehicles. IFAC-PapersOnLine 2016, 49, 88–93. [Google Scholar] [CrossRef]
- Vedachalam, N.; Ramesh, R.; Jyothi, V.B.N.; Ramadass, G.A.; Atmanand, M.A. An approach to operational risk modeling and estimation of safety levels for deep water work class remotely operated vehicle—A case study with reference to ROSUB 6000. J. Ocean Eng. Sci. 2016, 1, 109–118. [Google Scholar] [CrossRef]
- Remouit, F.; Abrahamsson, J.; Engström, J. Optical System for Underwater Positioning of Observation Class Remotely Operated Vehicle. Presented at the 3rd Asian Wave and Tidal Energy Conference (AWTEC), Singapore, Singapore, 24–28 October 2016. [Google Scholar]
- Li, D.; Chen, Y.; Shi, J.; Yang, C. Autonomous underwater vehicle docking system for cabled ocean observatory network. Ocean Eng. 2015, 109, 127–134. [Google Scholar] [CrossRef]
- Rémouit, F.; Ruiz-Minguela, P.; Engström, J. Review of Electrical Connectors for Underwater Applications. IEEE J. Ocean. Eng. 2017, 1–11. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Stewart, A.; Ryden, F.; Cox, R. An interactive interface for multi-pilot ROV intervention. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–6. [Google Scholar]
- Li, Y.; Zhang, Y.; Xu, X.; He, L.; Serikawa, S.; Kim, H. Dust removal from high turbid underwater images using convolutional neural networks. Opt. Laser Technol. 2017, in press. [Google Scholar] [CrossRef]
- Quevedo, E.; Delory, E.; Callicó, G.M.; Tobajas, F.; Sarmiento, R. Underwater video enhancement using multi-camera super-resolution. Opt. Commun. 2017, 404, 94–102. [Google Scholar] [CrossRef]
- Chen, H.-H.; Chuang, W.-N.; Wang, C.-C. Vision-based line detection for underwater inspection of breakwater construction using an ROV. Ocean Eng. 2015, 109, 20–33. [Google Scholar] [CrossRef]
- Reis, J.; Morgado, M.; Batista, P.; Oliveira, P.; Silvestre, C. Design and Experimental Validation of a USBL Underwater Acoustic Positioning System. Sensors 2016, 16, 1491. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Shi, W.; Xu, L.; Zhou, L.; Niu, Q.; Liu, J. Design of optical-acoustic hybrid underwater wireless sensor network. J. Netw. Comput. Appl. 2017, 92, 59–67. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, F.; Ito, M. New acoustic positioning system for an underwater robot using multiple frequencies. Artif. Life Robot. 2012, 16, 542–545. [Google Scholar] [CrossRef]
- Gao, J.; Proctor, A.; Bradley, C. Adaptive neural network visual servo control for dynamic positioning of underwater vehicles. Neurocomputing 2015, 167, 604–613. [Google Scholar] [CrossRef]
- Thomson, D.; Dosso, S. AUV localization in an underwater acoustic positioning system. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–13 June 2013; pp. 1–6. [Google Scholar]
- Topham, E.; McMillan, D. Sustainable decommissioning of an offshore wind farm. Renew. Energy 2017, 102, 470–480. [Google Scholar] [CrossRef]
- Wang, P.; Tian, X.; Peng, T.; Luo, Y. A review of the state-of-the-art developments in the field monitoring of offshore structures. Ocean Eng. 2018, 147, 148–164. [Google Scholar] [CrossRef]
- Barlow, E.; Öztürk, D.T.; Revie, M.; Boulougouris, E.; Day, A.H.; Akartunalı, K. Exploring the impact of innovative developments to the installation process for an offshore wind farm. Ocean Eng. 2015, 109, 623–634. [Google Scholar] [CrossRef] [Green Version]
- Irawan, C.A.; Jones, D.; Ouelhadj, D. Bi-objective optimisation model for installation scheduling in offshore wind farms. Comput. Oper. Res. 2017, 78, 393–407. [Google Scholar] [CrossRef] [Green Version]
- Kaiser, M.J.; Snyder, B.F. Modeling offshore wind installation costs on the U.S. Outer Continental Shelf. Renew. Energy 2013, 50, 676–691. [Google Scholar] [CrossRef]
- Snyder, B.; Kaiser, M.J. Ecological and economic cost-benefit analysis of offshore wind energy. Renew. Energy 2009, 34, 1567–1578. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ROV Manufacturer | Recommended ROV | Purchase Quote (k€) | Comments |
|---|---|---|---|
| Mariscope | Commander MK II | 140–175 | Medium class, instruments to be added |
| Ocean Modules | Ocean Modules V8Sii | 150 | Medium class, includes a manipulator |
| SAAB Seaeye | Cougar XT | 190 | Compact working class, includes a manipulator |
| Deep Ocean Exploration and Research (DOER) | H2000 | 340 | Ultra-compact work class ROV, includes a manipulator |
| Seamor Marine | Chinook | 210 | Medium class with manipulator |
| VideoRay | Pro 4 | 50 | Ultra-compact observation class ROV, without tool |
| VideoRay | Defender | 150 | Ultra-compact medium class, includes a manipulator |
| Methods | Particularities | Benefits | Risks |
|---|---|---|---|
| 1 -WEC and buoy deployed separately -Work done by divers only | Generator and buoy deployed separately with a crane, buoy connected to the submerged WEC at the site | Well-known and tested method, commonly used | The use of divers jeopardizes their personal safety |
| 2 -WEC and buoy deployed separately -Work done by both divers and ROVs | Generator and buoy deployed separately with a crane. Buoy connection to the submerged WEC at the site. The buoy connection is done by divers while the other tasks are performed by ROVs | Suggested method, partially tested, middle step towards a fully- automated deployment | The use of both divers and ROVs can raise the cost and be time consuming |
| 3 -WEC and buoy deployed together -Work done by ROVs only | Generator and buoy carried to the site together and deployed by two cranes at the same time. No buoy connection step in this method | Suggested method, partially tested, fully automated deployment | Needs precise preparation and organization, firm fastening of all lines and hoses |
| Scale | Operational Time | Personal Safety | Complexity of Operation |
|---|---|---|---|
| 1 | <5 min | Entirely safe | Very simple procedure, repetitive and simple task |
| 2 | >5 min and <15 min | Very low chances of injury | Mono-action operation with very low chances of sudden troubleshooting |
| 3 | >15 min and <30 min | Minor chances of injury | Mono-action operation with minor chances of sudden troubleshooting |
| 4 | >30 min and <1 h | Not safe | Complex operation involving multiple actions or high thrust and high accuracy |
| 5 | >1 h | Life threatening | Very complex operation requiring high thrust, high accuracy, and multiple actions |
| Phase | Task | Divers | ROVs | ||||
|---|---|---|---|---|---|---|---|
| Operational Time | Personal Safety | Priority Level | Operational Time | Task Complexity | Priority Level | ||
| WEC deployment | Monitoring of the submersion process | 2 | 4 | 8 | 2 | 1 | 2 |
| Pressurization hose disconnection | 1 | 3 | 3 | 1 | 2 | 2 | |
| Disconnecting the slings and shackles | 2 | 2 | 4 | 4 | 4 | 16 | |
| Cable connection | Drag the cable to the MS | 5 | 3 | 15 | 1 | 1 | 1 |
| Filling of air in the connector pocket/chamber | 2 | 2 | 4 | 1 | 2 | 2 | |
| Underwater cable connection | 1 | 3 | 3 | 1 | 3 | 3 | |
| Buoy deployment | Lifting the translator | 3 | 4 | 12 | 3 | 5 | 15 |
| Attaching the buoy | 3 | 4 | 12 | 4 | 5 | 20 | |
| Monitoring | Cable inspection | 5 | 2 | 10 | 5 | 1 | 5 |
| Buoy monitoring | 3 | 3 | 9 | 3 | 5 | 15 | |
| WEC observation | 3 | 2 | 6 | 3 | 1 | 3 | |
| Symbol | Resource | Cost |
|---|---|---|
| Diver | 90 €/h | |
| Worker for device preparation | 50 €/h | |
| Boat (for ROV or diver) | 120 €/h | |
| VideoRay Pro 4 with cutter and gripper | 7000 €/day | |
| VideoRay Defender | 7000 €/day | |
| VideoRay Pro 4 alone | 2000 €/day |
| Symbol | Rubric | Time per WEC Using Method 1 (h) | Time per WEC Using Method 2 (h) | Time per WEC Using Method 3 (h) |
|---|---|---|---|---|
| A | Number of WECs | − | − | − |
| B | WEC preparation | 1 | 1 | 1.5 |
| C | WEC submersion | 0.5 | 0.5 | 0.5 |
| D | Buoy preparation | 1 | 1 | 1.5 |
| E | Buoy connection | 3 | 3 | − |
| F | Cable connection | 0.5 | 1 | 1 |
| G | Monitoring | 0.5 | − | 0.5 |
| ROV | Purchase Rates (€) | Abilities | Rental Rates (€/day) | Break Even (In Days of Operation, Counting the Personnel) |
|---|---|---|---|---|
| Videoray Pro 4 Standard with 100 m cable and manipulator | 50,000 excl. VAT | Disconnect slings, remove shackles, holding the pressurized air hose for electrical connection | 2000 for observation 7000 for operations | From 7 to 25 days |
| Videoray Defender with 400 m cable and rotating manipulator | 150,000 excl. VAT | Generator deployment, holding the pressurized air hose for electrical connection, performing a connection | 7000 for operations | 23 days |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rémouit, F.; Chatzigiannakou, M.-A.; Bender, A.; Temiz, I.; Sundberg, J.; Engström, J. Deployment and Maintenance of Wave Energy Converters at the Lysekil Research Site: A Comparative Study on the Use of Divers and Remotely-Operated Vehicles. J. Mar. Sci. Eng. 2018, 6, 39. https://doi.org/10.3390/jmse6020039
Rémouit F, Chatzigiannakou M-A, Bender A, Temiz I, Sundberg J, Engström J. Deployment and Maintenance of Wave Energy Converters at the Lysekil Research Site: A Comparative Study on the Use of Divers and Remotely-Operated Vehicles. Journal of Marine Science and Engineering. 2018; 6(2):39. https://doi.org/10.3390/jmse6020039
Chicago/Turabian StyleRémouit, Flore, Maria-Angeliki Chatzigiannakou, Anke Bender, Irina Temiz, Jan Sundberg, and Jens Engström. 2018. "Deployment and Maintenance of Wave Energy Converters at the Lysekil Research Site: A Comparative Study on the Use of Divers and Remotely-Operated Vehicles" Journal of Marine Science and Engineering 6, no. 2: 39. https://doi.org/10.3390/jmse6020039